Embed Size (px)
Citation preview
Physics 215 – Fall 2014 Lecture 10-2 1
Welcome back to Physics 215
Today’s agenda:
• Extended objects
• Torque
• Moment of inertia

Physics 215 – Fall 2014 Lecture 10-2 2
Current homework assignment
• HW8:– Knight Textbook Ch.12: 8, 54, 58, 60, 62, 64– Due Monday, Nov. 5th in recitation
Physics 215 – Fall 2014 Lecture 10-2 3
Motion of center of mass of a system:
The center of mass of a system of point objects moves in the same way as a single object with the same total mass would move under the influence of the same net (external) force.

Physics 215 – Fall 2014 Lecture 10-2 4
Throwing an extended object
• Demo: odd-shaped object – 1 point has simple motion = projectile motion - center of mass
• Total external force Fext
aCM = Fext /M
• Translational motion of system looks like all mass is concentrated at CM

Physics 215 – Fall 2014 Lecture 10-2 5
Equilibrium of extended object
• Clearly net force must be zero
• Also, if want object to behave as point at center of mass ALL forces acting on object must pass through CM
Physics 215 – Fall 2014 Lecture 10-2 6
A few properties of the center of mass of an extended object
• The weight of an entire object can be thought of as being exerted at a single point, the center of mass.
• One can locate the center of mass of any object by suspending it from two different points and drawing vertical lines through the support points.
• Equilibrium can be ensured if all forces pass through CM
• An object at rest on a table does not tip over if the center of mass is above the area where it is supported.
Physics 215 – Fall 2014 Lecture 10-2 7
Conditions for equilibrium of an extended object
For an extended object that remains at rest and does not rotate:
• The net force on the object has to be zero.
• The net torque on the object has to be zero.
Physics 215 – Fall 2014 Lecture 10-2 8
Preliminary definition of torque:
The torque on an object with respect to a given pivot point and due to a given force is defined as the product of the force exerted on the object and the moment arm. The moment arm is the perpendicular distance from the pivot point to the line of action of the force.
Physics 215 – Fall 2014 Lecture 10-2 9
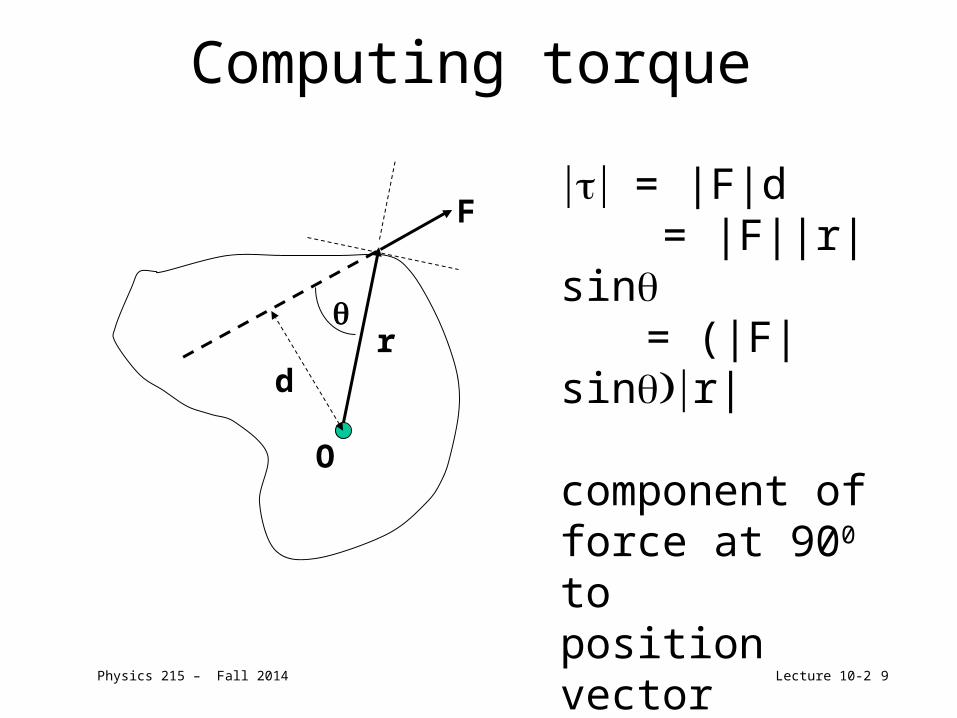
Computing torque
d
F= |F|d = |F||r|sin= (|F| sinr|
component of force at 900 toposition vectortimes distance
r
O
Physics 215 – Fall 2014 Lecture 10-2 10
Definition of torque:
where r is the vector from the reference point (generally either the pivot point or the center of mass) to the point of application of the force F.
where is the angle between the vectors r and F.

Physics 215 – Fall 2014 Lecture 10-2 11
Vector (or “cross”) product of vectors
The vector product is a way to combine two vectors to obtain a third vector that has some similarities with multiplying numbers. It is indicated by a cross () between the two vectors.
The magnitude of the vector cross product is given by:
The direction of the vector AB is perpendicular to the plane of vectors A and B and given by the right-hand rule.
Physics 215 – Fall 2014 Lecture 10-2 12
Interpretation of torque
• Measures tendency of any force to cause rotation
• Torque is defined with respect to some origin – must talk about “torque of force about point X”, etc.
• Torques can cause clockwise (+) or anticlockwise rotation (-) about pivot point

Physics 215 – Fall 2014 Lecture 10-2 13
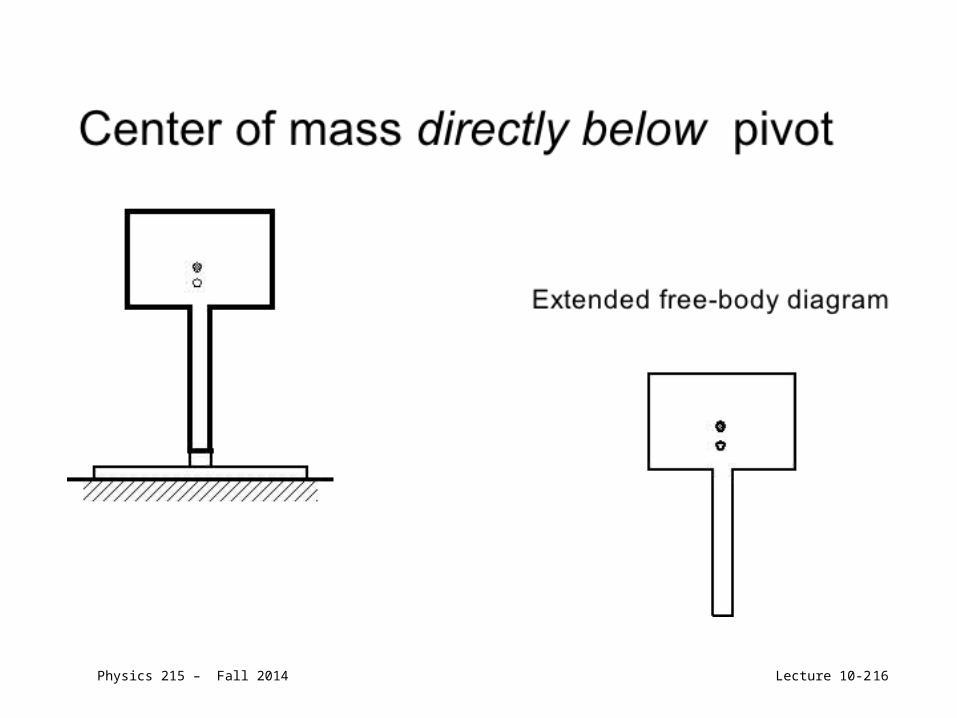
Extended objectsneed extended free-body diagrams
• Point free-body diagrams allow finding net force since points of application do not matter.
• Extended free-body diagrams show point of application for each force and allow finding net torque.
Physics 215 – Fall 2014 Lecture 10-2 14
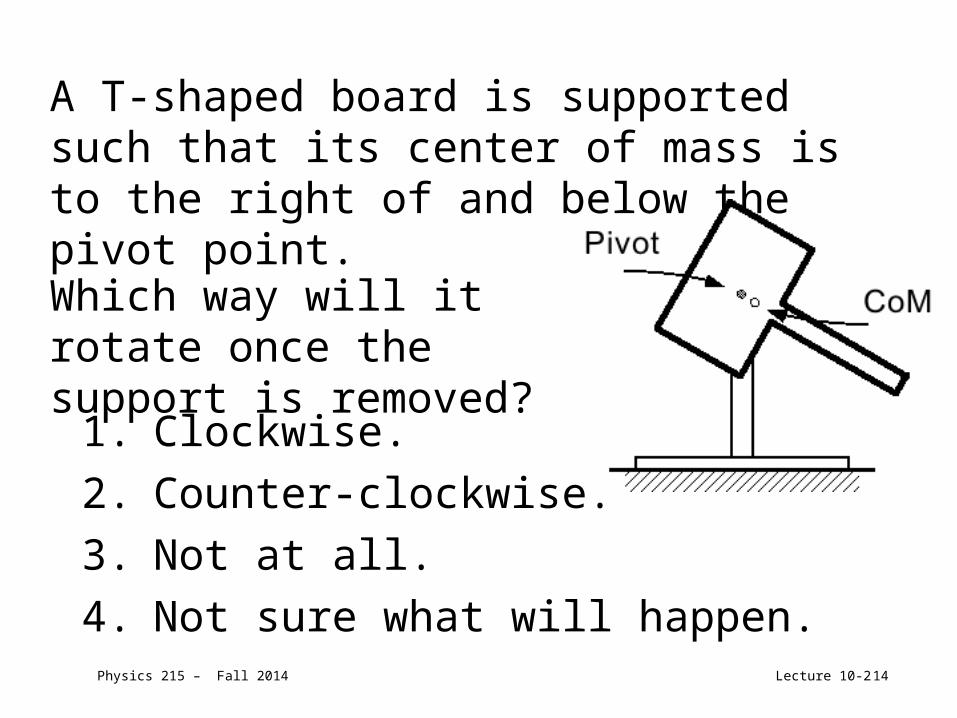
1. Clockwise.
2. Counter-clockwise.
3. Not at all.
4. Not sure what will happen.
A T-shaped board is supported such that its center of mass is to the right of and below the pivot point.
Which way will it rotate once the support is removed?

Physics 215 – Fall 2014 Lecture 10-2 15
Physics 215 – Fall 2014 Lecture 10-2 16
Physics 215 – Fall 2014 Lecture 10-2 17
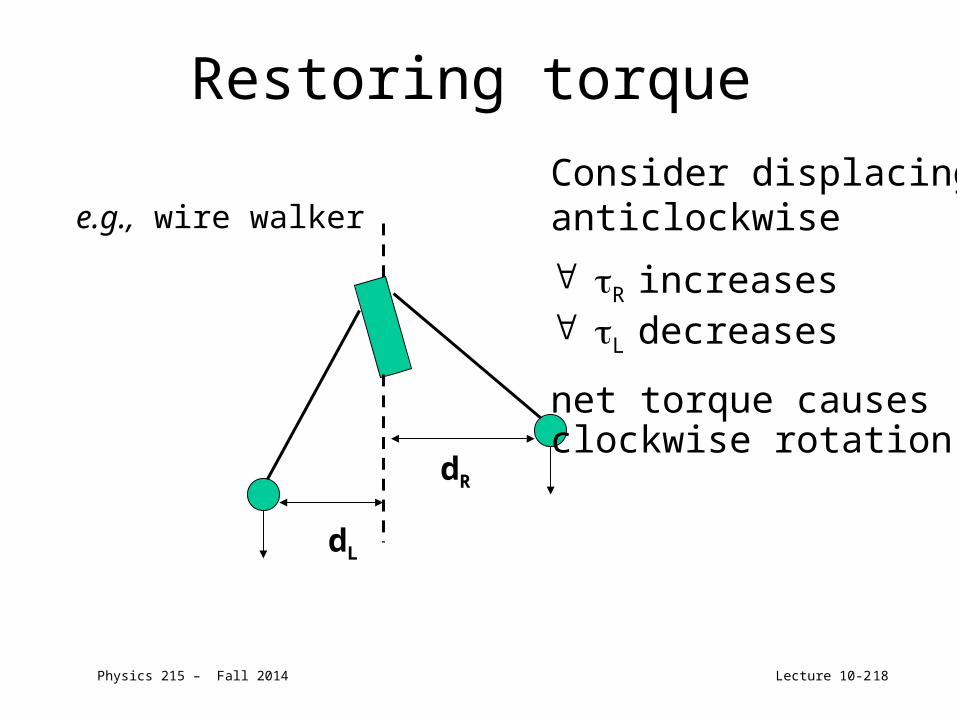
Examples of stable and unstable rotational equilibrium
• Wire walker – no net torque when figure vertical.
• Small deviations lead to a net restoring torque stable
Physics 215 – Fall 2014 Lecture 10-2 18
Restoring torque
dR
dL
Consider displacinganticlockwise
R increasesL decreases
net torque causesclockwise rotation!
e.g., wire walker
Physics 215 – Fall 2014 Lecture 10-2 19
Rotations about fixed axis• Every particle in body undergoes
circular motion (not necessarily constant speed) with same time period
• v = (2r)/T = r. Quantity is called angular velocity
• Similarly can define angular acceleration t

Physics 215 – Fall 2014 Lecture 10-2 20
Rotational Motion
pivot
ri|vi| = ri at 90º
to ri mi
* Particle i:
Fi
* Newton’s 2nd law:
mivi/t = FiT component
at 90º to ri
miri2/t = Fi
T
ri = i* Finally, sum over all masses:
* Substitute for vi and multiply by ri :
/t) miri2 = i =
net

Physics 215 – Fall 2014 Lecture 10-2 21
Discussion
/t) miri2
= net angular acceleration Moment of inertia, I
I= net
compare this with Newton’s 2nd law
M a = F
Physics 215 – Fall 2014 Lecture 10-2 22
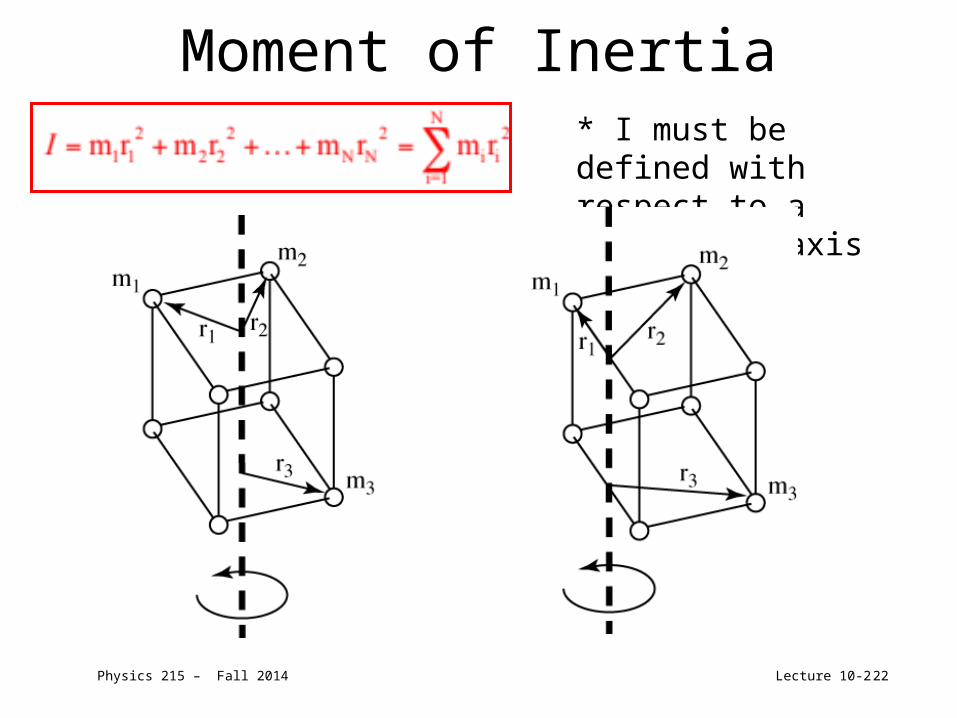
Moment of Inertia* I must be defined with respect to a particular axis
Physics 215 – Fall 2014 Lecture 10-2 23
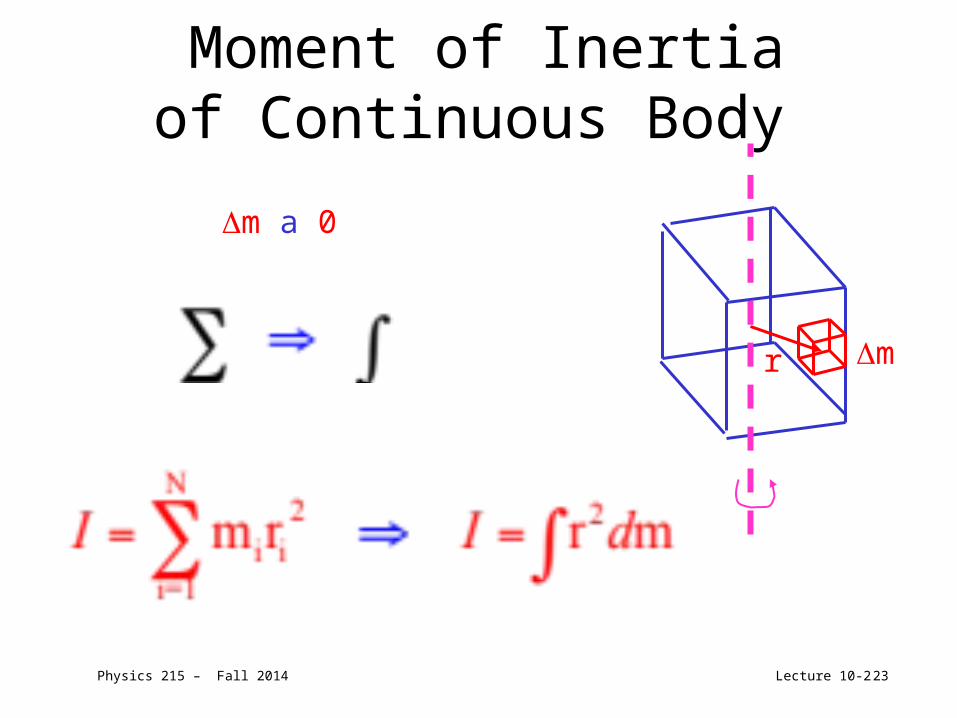
Moment of Inertia of Continuous Body
r m
m a 0

Physics 215 – Fall 2014 Lecture 10-2 24
Tabulated Results for Moments of Inertia of
some rigid, uniform objects
(from p.299 of University Physics, Young & Freedman)

Physics 215 – Fall 2014 Lecture 10-2 25
Parallel-Axis Theorem
CM
D
D
*Smallest I will always be along axis passing through CM
Physics 215 – Fall 2014 Lecture 10-2 26
Practical Comments on Calculation of Moment of Inertia for Complex Object
1. To find for a complex object, split it into simple geometrical shapes that can be found in Table 9.2
2. Use Table 9.2 to get CMfor each part about the axis parallel to the axis of rotation and going through the center-of-mass
3. If needed use parallel-axis theorem to get for each part about the axis of rotation
4. Add up moments of inertia of all parts
Physics 215 – Fall 2014 Lecture 10-2 27
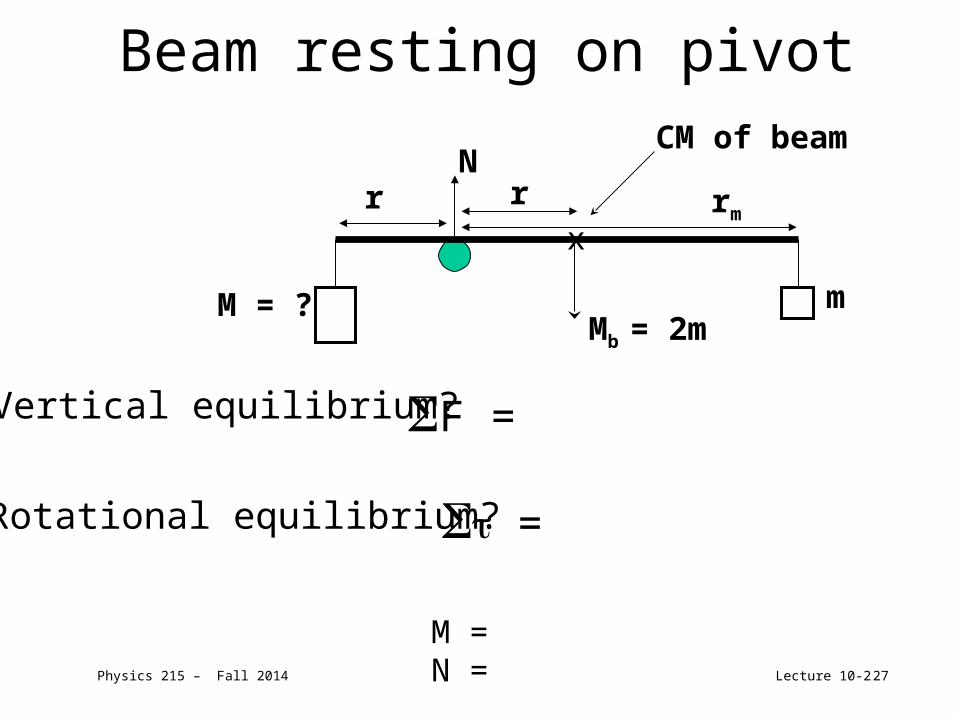
Beam resting on pivot
M = ? mMb = 2m
NCM of beam
Vertical equilibrium?
Rotational equilibrium?
r rx
rm
F =
=
M =N =
Physics 215 – Fall 2014 Lecture 10-2 28
Suppose M replaced by M/2 ?
• vertical equilibrium?
• rotational dynamics?
• net torque?
• which way rotates?
• initial angular acceleration?
F =
=
Physics 215 – Fall 2014 Lecture 10-2 29
Moment of Inertia?
I = miri2
* depends on pivot position!
I =
* Hence
Physics 215 – Fall 2014 Lecture 10-2 30
Rotational Kinetic Energy
K = i(mivi2 = (1/2)imiri
2
• Hence
K = (1/2)I
• This is the energy that a rigid body possesses by virtue of rotation
Physics 215 – Fall 2014 Lecture 10-2 31
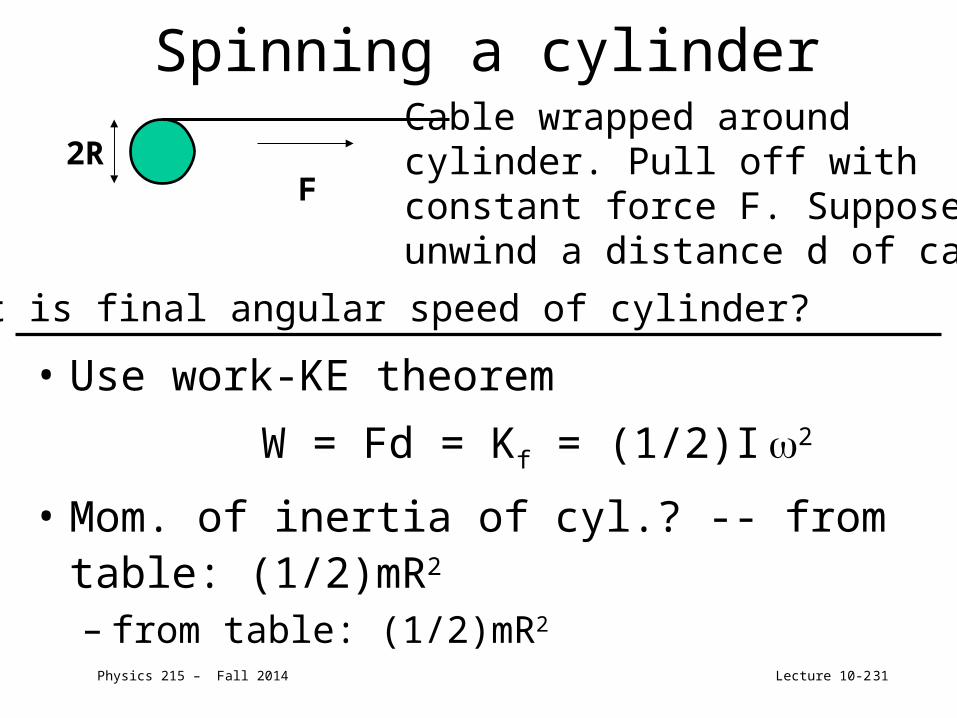
Spinning a cylinderCable wrapped aroundcylinder. Pull off withconstant force F. Supposeunwind a distance d of cable
F
• What is final angular speed of cylinder?
2R
• Use work-KE theorem
W = Fd = Kf = (1/2)I 2
• Mom. of inertia of cyl.? -- from table: (1/2)mR2
– from table: (1/2)mR2
= [2Fd/(mR2/2)]1/2 = [4Fd/(mR2)]1/2

Physics 215 – Fall 2014 Lecture 10-2 32
Reading assignment
• Rotations
• Chapter 12 in textbook