Embed Size (px)
Citation preview

Physical significance of sub-subtransient quantitiesin dynamic behaviour of synchronous machines
Dr. I.M. Canay
Indexing terms: Synchronous motors, Power electronics
Abstract: The recent accurate modelling ofalternating-current machines sometimes requires,in addition to the known transient and sub-transient quantities, the use of sub-subtransientquantities. The sub-subtransient time constantsare very small; they can, however, have a greatinfluence on the machine performance. The physi-cal meaning of these new sub-subtransient quan-tities for the stability and switch-on process of thesynchronous machine is explained and illustratedwith examples. It is shown that by introducing thesub-subtransient values, the effect of the solidturborotor and the behaviour of the salient-polemachine with solid poles can be treated with suffi-cient accuracy.
List of symbols
/fnG(p)U id, iq
mn(=l-s)
1 d dco dt dt
ra
stu, ud, uq
ufrpl rpil rplll1 d-> 1 d-> 1 drpl rpll rplll
9> 9> 9
rpl rpll rpm1 dO J J dO ' * dOrpl rpil rpm1 qO> l qO» J qO
xd> Xd> Xd> xdx x! x" x"'
9* q> -^q* -^qXdiPl XqiP)
o>n = 2nftt
= frequency, Hz= rated frequency, Hz= transfer function, see eqn. 1= stator current, d and q component,
p.u.= electrical torque, p.u.= speed, p.u.
= Laplace operator 1/s, p.u.
= armature resistance, p.u.= slip= time, s*= stator voltage, d and q component,
p.u.= field voltage, p.u.= transient, subtransient and sub-
subtransient short-circuit time con-stants in d-axis and q-axes*
= transient, subtransient and sub-subtransient open-circuit timeconstants*
= synchronous, transient, subtransientand sub-subtransient reactances*
= reactance operators with p = js fre-quency characteristics
= rated frequency, rad
* In all equations, time and time constants must be set in radians, i.e.t(on, T(on, rad
Paper 6277B (PI) first received 14th March and in revised form 27thJune 1988The author is with Asea Brown Boveri Ltd., CH-5401 Baden, Switzer-land
\j/d, \j/q = flux linkage, d and q component, p.u.S = load angle— • — = resistance, p.u.— • — = inductivity, reactance, p.u.—B— = eddy-current impedance (1 +jk)y/(s),
p.u. k imaginary component =0.5 — 0.7, k = 1 for the linear theory
1 Introduction
In the treatment of the dynamic processes of synchronousmachines, it is standard to use the two-axis theory, inwhich the 3-phase system of the stator is resolved intothe diagonal components of the rotor. In this way, boththe electrical and the magnetic anisotropy of the rotor ofthe AC machine can be taken into account. In each of theaxes, the equivalent circuits, one for the stator windingand n for the rotor, are magnetically coupled together.This coupling is illustrated schematically in Fig. 1 for an
Fig. 1 Representation of Park's two-axis theory
ideal rotor having one field winding and one damperwinding in the direct axis, and only one damper windingin the quadrature axis. Theoretically, however, there is nolimit to the number of rotor circuits.
When the rotor currents if, iD and iQ are eliminatedfrom the voltage equations for the axes, one obtains fourbasic equations for the machine (p = variable in the fre-quency domain of the Laplace transformation).
334 IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988

Yd ~ G{p)uf
= xq{p)L (1)
From these equations, it follows that only the three func-tions xjip), xjlp) and G(p) are necessary in order to iden-tify an AC machine. With constant excitation uf =constant, the dynamic behaviour of a synchronousmachine can be completely described (also taking intoaccount the saturation of the main field) by reactanceoperators xj(p) and xq(p). The function G(p) is requiredonly to determine more exactly the effect of the voltagecontrol. The design of the machine, i.e.
(a) completely or partly laminated poles(b) solid poles(c) type of damper winding(d) cylindrical or salient-pole rotor, etc.
does not change this statement in any way. The task issimply to determine and apply the correct functions ofxjj>), xq(p) and G(p) for the given construction.
The diagram in Fig. 1 represents a very close approx-imation of a fully laminated rotor having a completedamper cage and a single-axis field winding. In this case,the reactance operators are given by:
1 (1 + + pTd0)
xd(p)Prd)
xd
_ JpTd
J J pTd
x'J 1 + pTd(2)
1 +xq(p)
1 + pTZ(3)
The reactances xd, x'd, x"d and the short-circuit time con-stants Td and T"d for the direct axis can be determinedfrom short-circuit tests on the machine at no load.
In the original theory, the quadrature axis has no tran-sient quantities. However, the DC measurements atstandstill recommended by Kazovsky [1], and also theshort-circuit tests in the quadrature axis used by theauthor [2], showed in the 1960s that the quadrature axisof the real machine also has transient values x'q, T'q inaddition to the subtransient values xq, Tq. This meansthat at least two equivalent rotor circuits must also beconsidered for the quadrature axis although there is nofield winding. The reactance operator xq(p), similarly toeqn. 2, is given by:
pT"q)
(3.1)
As the reader has no doubt observed, investigations arestill being made in which xjjj) is used as in eqn. 3, i.e.
without x^ and T'q. But normally a model having 2 x 2equivalent rotor circuits (i.e. with transient and sub-transient quantities) is used for investigating the per-formance of a synchronous machine.
In these investigations, the saturation of the main field,if it has an effect on the process, is taken into accountseparately in accordance with the normal no-load char-acteristic which, strictly speaking, applies only to thedirect axis. As is known, the magnetisation curve for thequadrature axis deviates greatly from the normal no-loadcharacteristic. This rather complex subject has no bearingon the basic effect of the sub-subtransient values, andhence lies outside the scope of this paper. To explainbetter the phenomenon of the sub-subtransient values —in other words, the effect of the solid rotor parts — thesaturation of the main field will be neglected.
2 Discrepancies in the electrical torque
In reality, the rotor of a synchronous machine has a largenumber of circuits, as illustrated schematically in Fig. 2
q-axis
armature winding
-0 Ed1 — circuits for rotorsurface
*U Ed2—circuits for slot walls —
D*K-damper bars and wedges
; [ | f field winding
Eq1
Eq2
Fig. 2 Schematic illustration of circuits of d and q-axis for a turbo-generator
for a turbogenerator. When flux \J/d changes with time,currents flow not only in the field and damper windings,but also in the wedges and on the surface and in the teethof the solid rotor. This effect of the eddy currents is evenmore pronounced in the quadrature axis, in which thereis usually no well conducting field winding which wouldcompensate for the major part of the field. The effect ofthe eddy currents in the solid iron parts of the rotortherefore shows up more strongly in turborotors havingno damper winding, and particularly in salient-polemachines having solid poles. Hence, the rotor of a syn-chronous machine generally has a large number of cir-cuits in each axis, and as a result the standard modelwith 2 x 2 equivalent rotor circuits represents only acertain approximation. The question now presents itself:where and when does the approximation become notice-able?
When the electrical torque of a synchronous generatoris measured in a sudden 3-phase short circuit, a distinctasymmetry is found in the curve of the pulsating short-circuit torque (Fig. 3). This asymmetry stems from theasynchronous braking torque which follows from theairgap field of the DC components of the short-circuit
IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988 335

currents. In this DC field, the rotor turns with slip s ~ 1,and therefore brakes.
Calculations based on the characteristic valuesobtained from short-circuit tests show, however, a much
Fig. 3 Electrical torque during 3-phase terminal short-circuit
I mean value (asynchronous braking torque)calculationmeasurement
smaller asymmetry in the curve of the electrical torque.Thus, the calculation with measured data yields a lowerbraking torque then what was measured. This discrep-ancy is more pronounced in the case of salient-polemachines having solid poles.
Even better known is the fact that in asynchronousstarting, a salient-pole machine with solid poles producesa breakaway torque which is much greater than thatgiven by the theory when using the measured transientand subtransient values. This has led to the frequently-held opinion that salient-pole machines with solid polescannot be treated in accordance with the two-axis theory.This is true only when the transient and subtransientvalues are used in describing the functions xjj>), xq(p) inaccordance with eqns. 2 and 3.1. We know that eddy cur-rents lead to impedance functions containing yj(p) andthat they are strongly dependent on the saturation of theleakage paths. Further, an irrational function such asy/(p) cannot, of course, be expressed in terms of rationalfunctions. In spite of this, we expect, as engineers (but notas mathematicians), that it should be possible to describesufficiently accurately the overall performance of a rotorconsisting of the field winding, solid iron parts, damperwinding, etc., by 3 or 4 equivalent rotor circuits in eachaxis.
3 Sub-subtransient quantities
To predict the machine parameters, we have for manyyears used equivalent diagrams in which not only thefield winding, but also (if present) the damper winding,protection winding under the pole shoe, solid poles, polecores, etc. are connected together in accordance with
their physical connections to form a mosaic of circuit ele-ments (Fig. 4). The basic principles for calculating the ele-ments of the circuits are given in Reference 4. In such
0.0037 0.191 0.0011/s
E, E2
rotor DWs t a t o r surface and
pole f i e l d -core winding
0.037»—< 1
Xq(jS) ,
0.191
—••—
1.69
1—
iTo.
0.204- ^ H —
10247/s|
-3~
1
I1
0.17^ H
0185
"1 .0425/Vs
0.005 0.129 - 0.071 0.240 0.056 0.0005/s
0.1291 -T
1.46
0.061
0.012/s
j j A r f / s
stator so'id pole- pole fieldsurface core winding
protectionwinding
0.005 0.129
0.061
0.085(UjX)//s"
Fig. 4 Equivalent circuits
a 590 MVA turbogeneratorb 230 MVA salient-pole machine with solid poles
equivalent diagrams, the skin effect in damper bars or insolid poles and the saturation of the leakage reactances inrelation to the ampere conductors (MMF) can also betaken into account.
It is then no problem to determine the frequency char-acteristics x/js), xq(js) of the axes from these equivalentcircuits (rotor frequency = s/J. Today the frequency char-acteristics can also, of course with somewhat more effort,be obtained from field calculations, using finite-elementmethods.
When the values 1/x/js) and l/xq(js) are applied in acomplex co-ordinate system (Gaussian plane), we obtainthe current locus curves for the axes for ra = 0. (In thetwo-axis theory, of course, the stator resistance ra is con-sidered separately in the main equations.) The interpreta-tion of the current locus curves is known from the theoryof asynchronous machines: the real part yields the
336 IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988

reactive-current components, and the imaginary part is ameasure of the asynchronous torque.
2 f 1 1
sT'dl+s2Td
2
sT'
x'd.
(4)
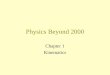
In Fig. 5, locus curves l/x^/s), l/xq(js) calculated in thisway for the 230 MVA salient-pole machine with solidpoles (equivalent circuits in Fig. 4b) are indicated bypoints + , for a rotor frequency range of 0.01 Hz(s = 0.0002) to 100 Hz (s = 2).
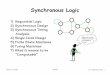
The reactance operators xj^js) and xJJs) can also bedetermined with sufficient accuracy by measurements atstandstill, with a supply frequency varied from 1 MHz to500 Hz [3]. As a second example, Fig. 6 shows theunsaturated current locus curves obtained from suchmeasurements at standstill, for a large 590 MVA turbo-generator having a rated frequency of 60 Hz.
When the calculated locus curves of l/xjjs), l/xq(js)(Fig. 5) or the measured curves (Fig. 6) are available, thecharacteristic values of the machine can be determined bybest fitting of the curves with the equations of x//s),xq(J
s) [4]- In fitting, however, one condition must be ful-filled : the visible course of the short-circuit current mustshow practically no change (see Fig. 7).
The best fitting is done using a computer programwith which the operator only has to enter the ordinal ofthe model (e.g. 2 x 2, 2 x 3 or 2 x 4). Details of the pro-
cedure lie outside of the scope of this paper, hence arenot given here.
In Fig. 5 and 6 are given:(a) the equations in general form(b) the best fitting characteristic values for the 2 x 2
and 2 x 3 models.
The new 2 x 3 model with three equivalent rotor circuitsin each axis has now transient, subtransient and sub-subtransient quantities. The locus curves calculated backfrom the two models are also shown in the Figures.Although these models yield practically the same curvefor the short-circuit current, the conventional model with2 x 2 equivalent rotor circuits is not sufficient to givesatisfactory frequency curves l/x/js), l/xQ(js) up to s = 1.The large deviation at s = 1 (Fig. 5 and 6) is due mainlyto the effect of the eddy currents (skin effect) in the solidrotor parts. If, however, three equivalent circuits in eachaxis are used for the rotor, it is possible to reproducemore exactly the true courses of l/xjjs) and l/xq(js) upto s = 1. In this way, the effect of the eddy currents canbe sufficiently accounted for. This means that for some ofthe processes which occur, not only the transient andsubtransient values must be taken into account, but alsothe sub-subtransient values x̂ ", xq, 7^" and Tq. Withthese sub-subtransient values, the machine with solidpoles can also be treated with sufficient accuracy.
4 Effect of sub-subtransient values on behaviourof machine
Modelling of the machine with three equivalent circuitsper axis for the rotor ( 2 x 3 model) is certainly notalways necessary. There are cases, however, where asimulation with two equivalent circuits per axis for the
1/xd(js)
0.1
/
0.01 I V * ^ 5 0 Hz
•100Hz
X/
0 2 AFig. 5 Computational determination of characteristic quantities of machine from current locus curves u/xjjs), u/xjjs)
The equivalent circuits of the machine with solid poles are given in Fig. 4b
Criteria used for best fitting with xJJs) = xt
iO model 2 x 3 xd = 1.59 x'd = 0.317 x"d = 0.264 xm
d = 0.186T i = 2.12 Tn
d= 0.0343 7 7 = 0.0032Ti0 = 10.7 T;o = 0.0413 770 = 0.0045
x, = 1.08 x; = 0.71 x; = 0.334 x^ = 0.167r ; = 0.285 r ; = 0.0221 r™ = 0.0032
r ^ , = 0.453 7 ^ = 0.0491 7 ^ = 0.0058
/ £ £ PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988
A model 2 x 2 xt = 1.59 xli = 0.314 x"t = 0.232
T'd= 2.08 r ; = 0.018Ti0 = 10.5 T"i0 = 0.024
xq = 1.08 x; = 0.635 x"q = 0.233T' = 0.181 7^ = 0.0122
T' = 0.325 T" =0.0316
337

rotor ( 2 x 2 model) is simply not accurate enough. The 4. / 3-phase short circuiteffect of the simulations selected will be demonstrated for For the salient-pole machine of Fig. 4b and 5, the currentthree cases, on two machines. and torque curves were calculated for a 3-phase terminal
1/xd(js)
0
1/xq(js)
£<0 1
Fig. 6 Experimental determination of characteristic quantities from current locus curves u/xjjs), u/xq(js) measur>
Criteria used for best fitting with xjtfs) = xd -^
+ measured |
red at standstill on a 590 MVA turbogenerator
• model 2 x 3 xd= 1.77 x'd = 0.311 x"d = 0.274 xd = 0.221T'd = 0.816 7^ = 0.069 7 7 = 0.0031
T'd0 = 4.69 Td0 = 0.077 Td0 = 0.0038
x, = 1.65 x'q = 0.767 x"q = 0.424 xq = 0.240rq = 0.226 T; = 0.031 7 7 = 0.0024
T'q0 = 0.524 T"q0 = 0.054 770 = 0.0041
model 2 x 2 xd = 1.77 x'd = 0.301T' = 0.771
400 electrical torque
-400
400
-400"
x'd = 0.301 x ; = 0.256T'd = 0.771 T", = 0.022
T'd0 = 4.55 T"d0 = 0.026
x, = 1.65 x; = 0.598 x"q = 0.322rq = 0.140 r; = 0.011r;0 = 0.405 7 ^ = 0.020
short-circuit following full-load generator operation,using two models. The results are shown in Fig. 7:
(a) with 2 x 3 rotor circuits (new model){b) with 2 x 2 rotor circuits (current model).
Fig. 7 Stator current and electrical torque during 3-phase terminalshort-circuit at rated generator load
Characteristic data of the machine are given in Fig. 5.a New model with 3 equivalent rotor circuits in each axisb Standard model with 2 equivalent rotor circuits in each axis
Fig. 8 Form of electrical torque during 3-phase terminal short-circuitat rated load
x x x arithmetic mean of the peaksbraking asynchronous torque
338 IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988

Comparison of the short-circuit current curves showspractically no difference, as the sub-subtransient com-ponent practically disappears with time constant T7 =3.2 ms to the appearance of the first current peak. In case(a), however, the electrical torque has a pronouncedasymmetry. In addition, the crests of the oscillatingtorque are in the positive direction sharp, and in thenegative direction blunt, so that the braking asynchro-nous torque is greater than the arithmetic mean of thepeaks (Fig. 8). These different torque behaviours show upeven more clearly in the change of load angle with time(Fig. 9). Under the influence of the large asynchronoustorque (Fig. la), the load angle at first decreases some-what; after 44 ms it is only 70° (Fig. 9, solid curve). This'back-swing' process is not properly determined when thegenerator is simulated with only two rotor circuits peraxis. With this model, the load angle would erroneouslybe shown as rising much faster, reaching 180° after 44 ms(Fig. 9, broken curve). For the turbogenerator of Fig. 6,this difference is somewhat less (Fig. 9).
4.2 StabilityThe back-swing process affects the stability of a gener-ator, in some cases quite considerably, and thereforemust be correctly calculated. To demonstrate this effect,the stability of the salient-pole generator of Fig. 5 will beinvestigated for a 3-phase nearby short circuit in thehigh-voltage network (Fig. 10). In the calculations, thevoltage and speed controllers will be neglected, so as notto falsify the effect of the modelling. The fault is to becleared by circuit breaker S after t = 0.280 s.
Investigation with the 2 x 3 model, which correctlyreproduces the frequency characteristics of the machine,shows that the load angle of the generator rises to 136°el, but then goes back, i.e. the generator does not lose itsstability with this fault (Fig. 10a). Simulation with theusual 2 x 2 model, however, indicates that the generatorwould lose synchronism (Fig. 10b). This false result is dueto the fact that the usual simulation model does not cor-rectly determine the asynchronous braking torque duringthe short circuit as previously explained.
4.3 Asynchronous startingThe dynamic starting process for motors is often simu-lated by a model having transient and subtransient
180
Fig. 9 Load angle during 3-phase terminal short-circuit at rated load
a Salient-pole generator with solid polesb Turbogenerator
new model with 3 equivalent rotor circuits in each axisstandard modle with 2 equivalent rotor circuits in each axis
values; normally there is no question raised as to thedesign of the machine (solid or laminated poles, etc.).Paradoxically, one often hears the opinion expressed thatthe two-axis theory should not be applied to the quasi-steady-state asynchronous starting of a salient-polemachine having solid poles. The opinion is correct, ofcourse, but only if the machine is modelled after the con-ventional theory as explained in Section 2. This dis-advantage of the conventional theory is eliminated assoon as the frequency characteristics of the machine,
L-L-L
400
-180
Fig. 10 Stator current and load angle in L-L-L disturbance with subsequent clearing
Characteristic data of the machine are given in Fig. 5.a New model with 3 equivalent rotor circuits in each axis b Standard model with 2 equivalent rotor circuits in each axis
IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988 339

xq(js) for the slip range s = 0 to 1 are simulatedwith sufficient accuracy; this can readily be done using a2 x 3 model. The difference in the calculation results willbe shown in the following illustrations.
Fig. 11 shows the torque slip characteristics of thesalient-pole machine of Fig. 5, for two different models,
1.2
0.8
0.4
1.0 0.5slip
Fig. 11 Asynchronous torque of synchronous machine with solid poles(Fig. 5)a New model with 3 equivalent rotor circuits in each axisb Standard model with 2 equivalent rotor circuits in each axis
with a constant terminal voltage of 100%. The calcu-lation is made in accordance with eqn. 4, using the char-acteristic values given in Fig. 5. The reader may like tomake this simple calculation himself so as to see the large
240
160
E 80
0
- 8 0W1 1
0
4
n1/1 . ^ — •
0 40 80a
0 40 80b
Fig. 12 Electrical torque and speed increase when switching ona New model with 3 equivalent rotor circuits in each axisb Standard model with 2 equivalent rotor circuits in each axis
effect which the sub-subtransient values have on theasynchronous torque. Although both models, i.e. 2 x 2 or2 x 3 rotor circuits, show practically the same results inthe slip range 0 < s < 0.25, the deviation outside of thisrange becomes considerable as the slip increases.
Fig. 12 shows the difference for the dynamic startingprocess, which is very important with respect to themechanical stresses in the shaft. In order not to falsify theeffects of the simulation, the starting was again investi-gated with a constant terminal voltage of 100%. In addi-tion, the rotor position was kept the same for both cases,as the course of the starting torque is strongly dependenton the rotor position. In the simulations, one can see agreat difference in the curves of torque versus speed; case12a represents the correct performance.
The differences, for machines with solid poles, areserious; they point out how important it can be to takeaccount of these extremely small sub-subtransient timeconstants when calculating some of the processes in themachine.
5 Conclusions
In the investigation of the dynamic processes in a syn-chronous machine, modelling with only transient andsubtransient quantities, i.e. with two equivalent circuitsper rotor axis, is often sufficient, but not always.
Because of the eddy currents (skin effect) in the solidrotor parts, three equivalent circuits are required for eachaxis to obtain sufficiently accurate modelling of the reac-tance operators x//s), xq(js) for an actual machine. Theresulting time constants TJ, T"q' are much smaller thanTj, Tq. This is why these new values were called the sub-subtransient values.
The opinion that the sub-subtransient time constantsof only 0.001 to 0.005 s cannot have an effect on themachine behaviour is not correct. Consideration of thesevery small time constants enables a more exact determi-nation of the asynchronous braking torque to be made.Therefore in cases where the asynchronous torque is ofimportance, the sub-subtransient values must also betaken into account in order to determine with sufficientaccuracy the machine behaviour.
The sub-subtransient values are absolutely necessaryfor realistic evaluation of the starting processes at stand-still and of the dynamic starting processes in machineswith solid poles. The sub-subtransient values also make itpossible to calculate the 'voltage depression' in short-circuit generators.
6 References
1 KAZOVSKI, E.J., and RAGOZIN, G.G.: 'Turbogenerator frequencycharacteristics determined experimentally', Electrichestvo, 1963, 10,pp. 14-22
2 CANAY, I.M.: 'New method of determining q-axis quantities of asynchronous machine', ETZ-A, 1965,86, (17), pp. 561-568
3 COULTES, M.E., and WATSON, W.: 'Synchronous machine modelsby standstill frequency response tests', IEEE Trans., 1981, PAS-100,(4), pp. 1480-1489
4 CANAY, I.M.: 'Equivalent circuits of synchronous machines for cal-culating quantities of the rotor during transient processes and asyn-chronous starting, Part I and II'. Brown Boveri Rev., 1969, 56, pp.60-71, and 1970, 57, pp. 134-143, respectively
5 CANAY, I.M.: 'Identification and determination of synchronousmachine parameters', ibid., 1984, (6/7), pp. 299-304
340 IEE PROCEEDINGS, Vol. 135, Pt. B, No. 6, NOVEMBER 1988