Upload
others
View
1
Download
0
Embed Size (px)
Citation preview
DOC 99-70-09
PHARE Final ReportPHARE/EHQ/MAN/FR;1.0
Prepared by: M. van Gool, EUROCONTROL
H. Schröter, EUROCONTROL
Date: Nov 1999
EUROCONTROL
96 rue de la Fusée
B-1130 BRUXELLES
Copyright Statement PHARE Final Report
-2- Version 1.0, Nov 1999 DOC 99-70-09
The information contained in this report is the property of the PHARE Participants*.
The report or parts thereof may be published and or reproduced on the condition thatdue acknowledgement of authorship is made by quoting the copyright statementbelow. The copyright and the foregoing condition on publication and reproductionshall extend to all media in which the information may be embodied.
The information contained in this document is provided on an "as-is" basis and thePHARE Participants shall provide no express or implied warranty of any kind andshall accept no liability whatsoever for or in connection with the use of the informationcontained in the document.
* The PHARE Participants are:
- the EUROCONTROL Agency;
- the CENA (Centre d'études de la navigation aérienne);
- the STNA (Service technique de la navigation aérienne);
- the NLR (Nationaal Lucht- en Ruimtevaartlaboratorium);
- the RLD (Rijksluchtvaartdienst);
- the LVNL (Luchtverkeersleiding Nederland);
- the DLR (Deutsches Zentrum für Luft- und Raumfahrt);
- the DFS (Deutsche Flugsicherung GmbH);
- the UK CAA (Civil Aviation Authority);
- the NATS (National Air Traffic Services);
- the DERA (Defence Evaluation and Research Agency)
Copyright statement:
The copyright in this report vests in the European Organisation for the Safety of AirNavigation (EUROCONTROL); the CENA (Centre d'études de la navigationaérienne); the STNA (Service technique de la navigation aérienne); the NLR(Nationaal Lucht- en Ruimtevaartlaboratorium); the RLD (Rijksluchtvaartdienst); theLVNL (Luchtverkeersleiding Nederland); the DLR (Deutsches Zentrum für Luft- undRaumfahrt); the DFS (Deutsche Flugsicherung GmbH); the UK CAA (Civil AviationAuthority); the NATS (National Air Traffic Services) and the DERA (DefenceEvaluation and Research Agency).
All rights reserved
Report Title Revision History
DOC 99-70-09 Version 1.0, Nov 1999 -3-
REVISION HISTORY
Date Revision Number Reason for revision
May 1999 0.1 Initial incomplete draft for DRG teleconference6 May
July 1999 0.2 First complete draft for H. Schröter
Aug 1999 0.3 Finalised draft for DRG review
Sep 1999 0.4 Version as reviewed by C. Meckiff
Nov 1999 1.0 Publication version
Document Approval PHARE Final Report
-4- Version 1.0, Nov 1999 DOC 99-70-09
DOCUMENT APPROVAL
NAME SIGNATURE DATEAUTHOR 1 Mick van Gool 15-11-99
AUTHOR 2 Helmut Schröter 15-11-99
PHARE ProgrammeManager
Helmut Schröter 15-11-99
Report Title Executive Summary
DOC 99-70-09 Version 1.0, Nov 1999 -5-
EXECUTIVE SUMMARY
The Programme for Harmonised ATM Research in EUROCONTROL (PHARE) was acollaborative research programme within Europe, whose purpose was to investigatean advanced air traffic management concept. This concept was based on anenvironment in which all existing and planned aircraft trajectories were known to bothairborne and ground systems in 4 dimensions (i.e. including time). Datalink was usedfor the exchange of data between ground ATC systems and airborne 4D flightmanagement systems to ensure consistency.
The objective of PHARE was to organise, co-ordinate and conduct studies andexperiments to prove and demonstrate the feasibility and merits of such a future air-ground integrated air traffic management system in all phases of flight. Theprogramme started in 1989 and was completed at the beginning of 1999.
In the planning and execution of PHARE, a number of European researchestablishments, assisted by national authorities, decided to combine their air trafficcontrol and aeronautics experience and resources to mount a comprehensive and co-ordinated research effort, building on existing in-house programmes.
This final synthesis report summarises the organisation and results of all projects thatformed part of the programme, and gives an overview of achievements and majorlessons learned.
The conclusions show that air traffic controllers who participated in the experimentsclearly recognised the potential of the PHARE concept, but also realised that it wouldlead to considerable changes in their roles. In particular it tends to reinforce planningrather than executive tasks. Real-time trials on a variety of sectors showed increasesof traffic throughput and/or improved accuracy, while maintaining an acceptable levelof controller workload.
Due to timescale limitations a full gate-to-gate exercise could not be done, so itcannot be stated that the experiments proved that the concept leads to increasedairspace capacity.
Nevertheless, the programme results and other related spin-offs have given a clearindication that further work in this area is warranted.
Acknowledgement Report Title
-6- Version 1.0, Nov 1999 DOC 99-70-09
Acknowledgements
In a major multi-national research programme such as PHARE, it is impossible toobtain significant results without considerable effort to establish and maintain goodworking relations between the various partners. In total an average of between 100and 150 man-years were spent on PHARE every year.
Over the 10 years of PHARE there were a number of different people responsible formanagement and co-ordination at all levels. All are to be thanked for keeping theprogramme high on the political agenda of the various participating establishments.
At the PHARE Management Board level many thanks are due to the successivechairmen, Georges Maignan (EEC) and Jean-Marc Garot (EEC) and to all other PMBmembers throughout the years.
At the level of the PHARE Coordination Committee, the excellent work of the PHAREprogramme managers B. Kirstetter, R. Rawlings and H. Schröter in performing theday-to-day duties at EUROCONTROL headquarters is acknowledged. It would havebeen impossible to complete this work without the assistance of Mick van Gool andIan Wilson in the PHARE management cell, along with the outstanding support ofStephanie Campbell, Sandra McGillicuddy and Marie-Helene Fassotte.
The following PHARE project leaders and their teams are also acknowledged for theconsiderable effort they put into managing complex parts of the work, sometimesunder highly stressed conditions:
EFMS: Roland Rawlings (EHQ) and Ed Bailey (EHQ)
AHMI: Uwe Teegen (DLR), Ronald Verhoeven (NLR)
GHMI: Peter Jorna (NLR)
PATs: Eric Petre (EHQ), Marc Le Guillou (CENA) and Ian Wilson (EHQ)
CMS: Jean-Raymond Velten (CENA)
Meteo: Dave Underwood (NATS)
PATN: Bo Overgaauw (CENA) and Gérard Mittaux-Biron (CENA)
Validation: Rob Whitaker (NATS)
PD/1: Rod Gingell (DERA)
PD/2: Johannes Reichmut (DLR)
PD/3: Marc Bisiaux (EEC), Pascal Huet (CENA), Jean-Louis Martin (CENA), RobertGraham (EEC) and Wim Post (NLR).
Thanks are also due to the pilots and air traffic controllers that participated in thevarious PHARE trials: without their open-mindedness and expertise the outcome ofthe exercises would be worthless.
Finally, we remember Marc LeGuillou (CENA), who was a major contributor toPHARE, much appreciated by all those who worked with him. Marc passed away on 8September 1996.
PHARE Final Report Contents
DOC 99-70-09 Version 1.0, Nov 1999 -7-
LIST OF CONTENTS
1. INTRODUCTION.............................................................................................11
2. BACKGROUND..............................................................................................13
2.1. ATM RESEARCH ISSUES AS SEEN AT THE OUTSET OF PHARE ................13
2.2. KEY PHARE RESEARCH TOPICS ...........................................................14
2.3. RULES OF CO-OPERATION......................................................................15
2.3.1. The basic PHARE agreement ..................................................15
2.3.2. Specific Project Agreements ....................................................16
2.3.3. Definition and execution of shared and commonly financedprojects ....................................................................................16
2.3.4. Management structure .............................................................17
2.3.5. Organisation of the main funding of projects ............................17
2.3.6. Tracking of progress ................................................................19
3. ELEMENTS OF THE PHARE PROGRAMME.................................................21
3.1. STUDIES ...............................................................................................21
3.1.1. PHARE Scenario .....................................................................21
3.1.2. Role of man study ....................................................................21
3.1.3. Operational experiments ..........................................................22
3.1.4. Air-ground data exchange study ..............................................22
3.1.5. The meteorological study .........................................................22
3.2. GROUND TOOLS DEVELOPMENT PROJECTS ............................................23
3.2.1. PHARE Advanced Tools (PATs) ..............................................23
3.2.2. Ground Human Machine Interface (GHMI) ...............................24
3.2.3. Common Modular Simulator (CMS)..........................................25
3.2.4. Results of the ground tools development projects ....................25
3.3. AIRBORNE TOOLS DEVELOPMENT PROJECTS .........................................26
3.3.1. Experimental Flight Management System................................26
3.3.2. Airborne Human Machine Interface (AHMI)..............................27
3.3.3. Results of the airborne program...............................................28
3.4. AIR/GROUND COMMUNICATION DEVELOPMENT PROJECT .........................29
3.4.1. PHARE Aeronautical Telecommunications Network.................29
3.4.2. Results of the PATN project .....................................................30
4. PHARE DEMONSTRATIONS.........................................................................31
4.1. TRIALS DIRECTED AT EN-ROUTE ISSUES..................................................32
4.1.1. PHARE Demonstration 1 (PD/1) ..............................................32
Contents PHARE Final Report
-8- Version 1.0, Nov 1999 DOC 99-70-09
4.1.2. PHARE Demonstration 1+ (PD/1+) ......................................... 34
4.1.3. PHARE Demonstration 1++ (PD/1++) ..................................... 34
4.2. TRIALS DIRECTED AT ARRIVALS IN THE EXTENDED TERMINAL AREA ......... 36
4.2.1. PHARE Demonstration 2 (PD/2) ............................................. 36
4.2.2. PHARE Demonstration 2+ (PD/2+) ......................................... 38
4.3. TRIALS DIRECTED AT ALL FLIGHT PHASES.............................................. 39
4.3.1. Evolution of PHARE Demonstration 3 ..................................... 39
4.3.2 PHARE Demonstration 3 at CENA.......................................... 40
4.3.3. PHARE Demonstration 3 at EEC ............................................ 43
4.3.4. PHARE Demonstration 3 at NLR............................................. 43
4.3.5. PD/3 continuation trial ............................................................. 44
4.4. VALIDATION ......................................................................................... 45
5. SPIN-OFFS OF PHARE................................................................................. 47
5.1. FEASIBILITY OF THE ADVANCED ATM CONCEPT..................................... 47
5.2. DELIVERABLES AND PRODUCTS ............................................................ 47
5.3. ATM R&D........................................................................................... 47
5.4. PHARE CONFERENCES ....................................................................... 48
6. CONCLUSIONS............................................................................................. 49
6.1. GENERAL............................................................................................. 49
6.2. DETAILED CONCLUSIONS ON INDIVIDUAL PROJECTS ............................... 50
7. RECOMMENDATIONS.................................................................................. 53
7.1. AREAS STILL TO BE INVESTIGATED ........................................................ 53
7.2. OUTLOOK ............................................................................................ 53
8. GLOSSARY, LIST OF ACRONYMS.............................................................. 55
9. REFERENCES............................................................................................... 59
APPENDIX A: LESSONS LEARNED ON ORGANISATION OF MULTI-NATIONAL R&D
PHARE Final Report Contents
DOC 99-70-09 Version 1.0, Nov 1999 -9-
LIST OF FIGURES
Figure 1.: Overview of PHARE projects and their timescales ..........................16
Figure 2.: Organisation of the management of PHARE ...................................17
Figure 3.: Manyears spent on PHARE projects per year..................................18
Figure 4: Budget spent on PHARE per year (EUROCONTROL + partners) ....18
Figure 5: Navigation Display in lateral and vertical mode.................................27
Figure 6.: Multi-Cockpit Simulator with two-crew positions used during AHMIevaluation in PD/3 ...........................................................................28
Figure 7.: PATN Overall architecture...............................................................29
Figure 8.: PHARE Demonstration programme.................................................31
Figure 9.: Elements of PHARE Demonstration 1 .............................................32
Figure 10: The PD/1 display with the Highly Interactive Problem Solver..........33
Figure 11.: Lay-out of the NATS Research Facility for the PD/1++ trial ...........35
Figure 12.: Elements of PHARE Demonstration 2 ...........................................36
Figure 13.: PD/2 Arrival Management display..................................................37
Figure 15.: En-route/ETMA and Departure Controller Working Positions.........40
Figure 16.: CENA Athis-Mons Controller Working Position simulation facility ..41
Figure 17.: NLR PD/3 Continuation Trial simulation set-up..............................44
Figure 18.: Plan View Display and Arrival Management Window used in theNLR PD/3 Continuation Trial ...........................................................44
Contents PHARE Final Report
-10- Version 1.0, Nov 1999 DOC 99-70-09
Page intentionally left blank
PHARE Final Report Introduction
DOC 99-70-09 Version 1.0, Nov 1999 -11-
1. INTRODUCTION
The Programme for Harmonised ATM Research in EUROCONTROL (PHARE) was acollaborative research programme within Europe designed to investigate a future AirTraffic Management (ATM) concept. The objective of PHARE was to organise, co-ordinate and conduct studies and experiments to prove and demonstrate the feasibilityand merits of a future air-ground integrated air traffic management system in allphases of flight. The programme started in 1989 and was completed in 1999. The costover 10 years was approximately 90 MECU (MEuro), of which about 50% was fundedfrom the research budget of the EUROCONTROL Agency.
In the planning and execution of PHARE, a number of European researchestablishments, assisted by national authorities, decided to combine their Air TrafficControl (ATC) and aeronautics experience and resources to mount a comprehensiveand co-ordinated research effort, building on existing in-house programmes.
This report gives an overview of the results obtained from the programme, andpresents some of the lessons learned from running a large R&D programme in a multi-national environment. Chapter 2 gives an overview of the research issues. Chapter 3explains the rules of co-operation and gives information on management, funding andproject planning and tracking.
The essence and main results of each individual PHARE study and project aredescribed in Sections 3.1 (studies), 3.2 (ground tools), 3.3 (airborne tools), 3.4(air/ground communication) and Chapter 4 (PHARE demonstrations). Some direct andindirect spin-offs from PHARE are described in Chapter 5.
Conclusions, recommendations and lessons learned are given in Chapters 6 and 7.
More detailed information on each of the studies and projects can be found in thesupporting documents listed in Chapter 9.
Further lessons learnt, specifically concerning management issues in international co-operative research, are presented in an appendix.
PHARE Final Report
-12- Version 1.0, Nov 1999 DOC 99-70-09
Page intentionally left blank
PHARE Final Report Background
DOC 99-70-09 Version 1.0, Nov 1999 -13-
2. BACKGROUND
2.1. ATM RESEARCH ISSUES AS SEEN AT THE OUTSET OF PHARE
In 1989, outline descriptions of future Air Traffic Management (ATM) concepts, such asFANS and FEATS, identified a number of measures that were supposed to helpovercome anticipated future capacity shortfall. One of these concepts was theintegration of airborne and ground systems via datalink, with the objective of overallATM system optimisation. The concept descriptions, however, provided no detail on:
• Airborne and ground system interaction;• Possible and acceptable levels of automation support;• Man-machine interaction;• The influence of airspace organisation;• ATC procedures.
On consideration, the actual list of “potential research issues” proved to be quiteextensive. It was roughly divided into four areas:
1. Airborne:
• Man-machine interface design for a 4-Dimensional Flight Management System(4D FMS) with air-ground communication;
• Navigation accuracy available with 4D FMS, both en-route and in the terminalarea;
• The role of the pilot in a future air traffic management system. Task-sharingbetween pilot and airborne system.
2. Ground-based:
• Man-machine interface design for the new ground system functions;• Operational philosophy for use of the new functions, and the hierarchical
relationships between them;
• Role of the planning and executive controller, and sharing of activities betweenman and machine;
• Time horizon for the new planning functions;• Accuracy required for trajectory information, including downlinked information
from aircraft with 4D FMS in all phases of flight.
3. Air-ground communications:
• Influence of communication characteristics on(a) Pilot and controller, and hence
(b) Acceptance of a future air traffic management system;
• The respective roles of digital and voice communication (e.g. influence of lossof “party-line” information);
• Role of the pilot in digital air-ground communication;• Role of the controller in digital air-ground communication.
Background PHARE Final Report
-14- Version 1.0, Nov 1999 DOC 99-70-09
4. Supporting elements:
• Better meteorological forecasting using more timely data, leading to improvedtrajectory prediction;
• Library of aircraft performance models with standard interfaces;• Standardisation of methods and tools to analyse and validate the results of
experiments;
• Infrastructure for fast, efficient exchange of research and developmentinformation and tools for programme planning and control.
2.2. KEY PHARE RESEARCH TOPICS
The PHARE programme could not address all of these research issues, so it wasmade up of: initial studies including concept elaboration, development of tools(airborne-, ground-, communication- and supporting tools) and a set ofdemonstrations, addressing the following topics:
• Capabilities of aircraft with advanced navigation and flight management equipment,including the PHARE-developed Experimental Flight Management System(EFMS);
• Advanced automation support for air traffic controllers. Modification of controllerroles, including new concepts of task sharing within a group of controllers andmulti-sector planning;
• Ground human machine interface for efficient and effective use of the automationsupport;
• Better use by ground systems of data available from the new on-board systems;• Use of datalink for air-ground information exchange, in particular for trajectory
negotiation;
• Better meteorological forecasting to improve trajectory prediction;• Use of a common methodology and standard tools and procedures for
experimental validation.
The term “demonstration” was used for large-scale simulation activities, comprisingintegrated ground and air systems with full datalink facilities. PHARE Demonstrations(PD’s) were considered the final step in a process of functional testing, basicevaluation of individual tools and partial validation of sub-systems of increasingcomplexity. The participation of pilots and controllers in the validation process wasconsidered essential.
To summarise, PHARE was concerned with the investigation of operational concepts(close to the ICAO Future Air Navigation System panel concept, FANS). By means ofa set of demonstrations it aimed to provide validated options for use in the definition ofthe future European ATM System (EATMS).
PHARE did not address the engineering design of a future system, nor its physicalarchitecture, pre-operational validation or certification issues. Neither did it attempt toaddress more radical concepts based on “airborne” air traffic control or “autonomousaircraft”.
PHARE Final Report Background
DOC 99-70-09 Version 1.0, Nov 1999 -15-
2.3. RULES OF CO-OPERATION
2.3.1. The basic PHARE agreement
When PHARE was set-up, air-ground integration for air traffic management was afuturistic idea of researchers in various ATM research establishments. Earliestmeetings were held at the level of heads of those establishments, with the objective ofexchanging ideas, finding out more about the work taking place in each establishmentand comparing results. From these meetings the idea emerged to pool resources andstart a programme of research that could not be accomplished by any one partneralone due to resource limitations.
It was felt that forming a “gentleman’s club” to perform jointly defined research was theway to proceed. Having an officially signed agreement stating this intention waschosen as the best way to give this co-operation a legal perspective.
The basic PHARE agreement stated the programme’s aim, defined the managementstructure and established the rules of participation. Following endorsement by theEUROCONTROL Committee of Management, the Agreement was signed in 1989 foran initial period of seven years between the Director General of the EUROCONTROLAgency and the participating partners. This Agreement was later extended untilJanuary 2000.
The participants in PHARE were:
CAA/NATS Civil Aviation Authorities/National Air Traffic Services Ltd, UK;
DERA Defence Evaluation and Research Agency, UK;
CENA Centre d'Etudes de la Navigation Aérienne, France;
STNA Service Technique de la Navigation Aérienne, France;
DLR Deutsches Zentrum für Luft- und Raumfahrt, Germany;
DFS1 Deutsche Flugsicherung GmbH, Germany;
NLR Nationaal Lucht- en Ruimtevaartlaboratorium, The Netherlands;
RLD/LVNL2 Rijksluchtvaartdienst / Luchtverkeersleiding Nederland, TheNetherlands;
EHQ EUROCONTROL AGENCY – Headquarters, Brussels;
EEC EUROCONTROL Experimental Centre, Brétigny, France;
CEC Commission of the European Communities - DG VII, Brussels
(in a supporting role);
FAA Federal Aviation Administration, USA (with a special agreement);
NAV Canada Canada (with a memorandum of co-operation);
ENAV/SICTA Ente Nazionale di Assistenza al Volo / Sistemi Innovativi per il Controllodel Traffico Aereo, Italy (observer status)
AENA Aeropuertos Españoles y Navigación Aérea, Spain (observer status)
1 At the time of signing of the agreement called BFS
2 At the time of signing the agreement called LVB
Background PHARE Final Report
-16- Version 1.0, Nov 1999 DOC 99-70-09
The preliminary description of PHARE attached to the agreement was quite detailed,and in practice proved very close to what became the actual PHARE programme overthe years.
2.3.2. Specific Project Agreements
The basic PHARE agreement served as the framework for a series of separateagreements on specific projects that needed common financing, such as tool andfunction development programmes, and the PHARE demonstrations. Official approvalof the EUROCONTROL Committee of Management for these special agreementsmade it possible to plan budgetary credits for the activities and to place contracts withthe partners without the need to go through a time-consuming tendering process. Inpractice, common financing meant that PHARE partners provided about 50% of therequired funding themselves, and the EUROCONTROL Agency provided the rest.
Figure 1 gives an overview of all projects carried out under the PHARE umbrella withtheir timescales:
Figure 1.: Overview of PHARE projects and their timescales
2.3.3. Definition and execution of shared and commonly financed projects
Before a project was started and its corresponding agreement could be signed, adetailed project plan with work-share across the different partners for the duration ofthe collaboration had to be made. This was done by negotiation, taking into accountpartners’ interests and expertise, as well as available simulation facilities (existing or tobe developed). In most cases partners were keen to participate in all specific projectsso as not to miss the possibility of exchanging experience and ideas, and of course,funding.
This process resulted in a widely distributed approach based on the good intentions ofthe participants over an extended period of time. The nature of the projects andEUROCONTROL procedures for its annual financial commitments meant that about 40contracts were placed with the different partners each year. The co-operation of theEUROCONTROL Experimental Centre was a particular case, as no official contractswere placed internally with this unit of the EUROCONTROL Agency.
ID Name1 Studies2 JOINT PHARE DEMONSTRATIONS3 PHARE Demonstration 1 (PD/1)4 PHARE Demonstration 2 (PD/2)5 PHARE Demonstration 3 (PD/3)6 Validation (VAL)7 AIRBORNE TOOLS8 Experimental Flight Management System (EFMS)9 Airborne Human Machine Interface (AHMI)10 GROUND SYSTEM11 Common Modular Simulation (CMS)
12 PHARE Advanced Tools (PATs)13 Ground Human Machine Interface (GHMI)14 AIR-GROUND COMMUNICATION15 PHARE Aeronautical Telecommunications Network (PATN)16 Meteorological Model17 MANAGEMENT
'89 '90 '91 '92 '93 '94 '95 '96 '97 '98
PHARE Final Report Background
DOC 99-70-09 Version 1.0, Nov 1999 -17-
The distribution of projects and funding was transparent to all concerned by means oftables giving overviews per project and partner for each year.
2.3.4. Management structure
The PHARE programme was managed at three levels:
PHARE cellAssistance to PPM
Coordination groupproject 1
Project leaderProject 1
Coordination groupproject 2
Project leaderProject 2
Project leaderProject 3
Etc ...
PHARE Programme ManagerDay-to-day management
PHARE Coordination Committee6 meetings per year
PHARE Management Board2 meetings per year
Figure 2.: Organisation of the management of PHARE
At the highest level the PHARE Management Board (PMB) managed the political andresource aspects of the programme. This board was generally composed of heads ofparticipating research centres or institutes, plus the PHARE programme manager. Itwas at this level that major decisions affecting individual projects within the overallPHARE programme were made.
PMB meetings were generally held twice a year, and were also attended by theassociate partners (FAA, NAV Canada, ENAV/SICTA and AENA).
At the second level the PHARE cell, headed by the PHARE programme manager atEUROCONTROL headquarters, in co-operation with the PHARE Co-ordinationCommittee (PCC) which included representatives of all active partners, performed day-to-day management. Project progress was monitored in PCC meetings every twomonths. Decisions on priorities were taken, or sent upward to PMB level if they were ofa political nature.
At the third level project leaders were appointed for each specific project, somesupported by additional groups to ensure co-ordination with other related tasks.
2.3.5. Organisation of the main funding of projects
Funding procedures for the specific agreements simplified annual contract placement.For each specific ‘project agreement’ a complete work breakdown and project planwas produced, resulting in a multi-year overview of the work and funding distributionper partner and project. This overview was kept up to date for changing requirementsthroughout the years. It gave a degree of financial stability to the R&D establishments,creating enough confidence for higher management to build-up a considerable ATMR&D workforce. A positive by-product of the funding procedure was that more effortwas freed up for technical work, rather than being used on a potentially wastefulannual tendering process.
An overview of the total number of man-years and an estimate of the total budget(EUROCONTROL and partners) for PHARE work over the years is provided in Figures
Background PHARE Final Report
-18- Version 1.0, Nov 1999 DOC 99-70-09
3 and 4. The total budget spent over the 10 years was approximately 90 MEuro, ofwhich about half was provided from the EUROCONTROL R&D budget.
Figure 3.: Manyears spent on PHARE projects per year
Figure 4: Budget spent on PHARE per year (EUROCONTROL + partners)
0.0
20.0
40.0
60.0
80.0
100.0
120.0
1989 1990 1991 1992 1993 1994 1995 1996 1997 1998
Year
Man
-yea
rs
PD/1 + Follow-onPD/2PD/3Airborne + A/G communicationGround system toolsStudiesManagement
0
2000
4000
6000
8000
10000
12000
14000
1989 1990 1991 1992 1993 1994 1995 1996 1997 1998
Year
KE
uro
PartnersEUROCONTROL
PHARE Final Report Background
DOC 99-70-09 Version 1.0, Nov 1999 -19-
2.3.6. Tracking of progress
In order to track progress on this multi-project, multi-national programme, asophisticated planning mechanism was set-up and maintained throughout.
Project plans for each project were interlinked, showing deliverables of oneprogramme as milestones in another project (MSProject was used for this). Thetracking of progress was achieved by checking percentage of task completion for alltasks in each project with milestones indicating the availability of deliverables.
Project leaders were asked to provide progress reports to the PCC at two-monthlyintervals, updating percentage completion and estimated milestone and delivery dates.The linking mechanism then showed the influence of shifting a deliverable or milestonein one project on other projects.
In practice the process was quite tedious, but it did highlight any tasks that wereslipping, and the potential impact of the slip. For many projects it became evident withtime that the cumulative delays were slowly absorbing all slack.
In both the first and the second PHARE demonstrations the tracking process led topostponement of each demonstration by one year. In the case of PHAREDemonstration 2 (PD/2) to it also led to a reduction in scope. In the third demonstration(PD/3) a fixed end date was announced very early, and reductions in scope andfunctionality were required at various (and repeated) times when it was clear from theplanning that no more slack was available.
This tracking created a transparent environment in which decisions to postpone tasksor reduce functionality (in order to satisfy time scales) could be taken with allmanagement levels being informed of the consequences at an early stage.
It took quite some effort by the PHARE Cell to persuade project managers to adhere tothe two-monthly updating procedure. Project leaders have a natural resistance to givedetails of progress to higher level management, this being considered unwelcome andunnecessary additional workload. Moreover, they often have little confidence thatcorrect ‘informed’ decisions will be taken on the basis of the information. Finally,classical problems of a matrix organisation manifested themselves when a partner’srepresentative in the PHARE Co-ordination Committee or PHARE Management Boardwas not the line manager of a PHARE project leader in his establishment.
Background PHARE Final Report
-20- Version 1.0, Nov 1999 DOC 99-70-09
Page intentionally left blank
PHARE Final Report Elements of the PHARE Programme
DOC 99-70-09 Version 1.0, Nov 1999 -21-
3. ELEMENTS OF THE PHARE PROGRAMME
3.1. STUDIES
3.1.1. PHARE Scenario
An early result of the combined PHARE research effort was the description of thePHARE Medium-Term Scenario (PMTS). This document describes a conceptualmodel for a future ATM system making full use of the assumed capability of aircraft tofly precise 4-dimensional trajectories in an air/ground datalink environment. This wasone of the first PHARE study deliverables, produced in 1990 (Ref. 1).
This work was subsequently complemented by detailed operational specifications andscenario descriptions for the three PHARE demonstrations (Refs. 88 and 90 for PD/1,Refs. 94 and 97 for PD/2, Refs. 104, 100 and 101 for PD/3).
3.1.2. Role of man study
Early discussions were held on the key question of the ‘role of man’ in future ATMsystems (Ref. 11), with the conclusion that human factors issues needed to be takenseriously, but that sufficient funding and resources were not always available. Onereason, perhaps, was that human factors work had previously remained largely withinacademic circles, whereas ATC systems development was essentially an industrialexercise. National research establishments have a role to play in bridging gaps, andthe PHARE programme, composed of research establishments and ATC providers,represented a unique opportunity to break down the barriers.
The following recommendations were formulated as a starting point for the humanmachine interface project:
• Human factors issues should be considered throughout the PHARE programme toensure that human and machine are correctly matched and mutually supportive.
• An iterative approach should be used to address human factors issuescorresponding with increasing levels of detail during system evolution.
• Human factors within PHARE should be organised as a single coherentprogramme so that findings from each part can be interpreted in relation to thewhole, and not take the form of a series of unconnected items.
• The work must ensure that humans can perform their assigned functions safelyand efficiently, and that the new functions are teachable.
• A ‘problem-driven’ rather than a ‘technology-driven’ approach should be used, andautomation provided within PHARE must always be human-centred.
• In the design of the human machine interface all the information that may beneeded must be carefully defined, and check to make sure it will be available. It isalso necessary to investigate whether extensive computer assistance will have atendency to dissociate the human controller from the aircraft under his or hercontrol, and whether this affects safety.
• Real time simulations should be used as the primary investigative tool. Wheneverpossible, simulations should be preceded by laboratory studies or simplesimulations, and should be followed by operational or field trials to confirm resultsand further validate the operational concept.
Elements of the PHARE Programme PHARE Final Report
-22- Version 1.0, Nov 1999 DOC 99-70-09
3.1.3. Operational experiments
A study was also performed by the “role of man” group, mentioned above, as aninterim deliverable to provide guidance on the operational experiments that shouldtake place in PHARE (Ref. 10). Two types were identified:
• Rapid prototyping or part-task simulations to verify the design and structure ofPHARE advanced tools before being incorporated into real-time simulations.
• Full real time simulations intended to allow quantitative verification of systemworkability and to give estimates of traffic capacity.
Much of this material is integrated into the final role of man report (Ref. 11).
3.1.4. Air-ground data exchange study
A study was executed to identify several air-ground data link applications, and toprovide an initial estimate of data flows and message sizes for a number of basicsituations. Results are reported in Ref. 12.
In particular the study defined the dialogue needed for an aircraft to enter an advancedATM area, in order to establish consistent data between ground system and aircraft.An estimate was also made of the amount of up-linked meteorological data requiredfor use in the on-board database. The study concluded that the theoretical bandwidthrequired for both these applications would be very low.
It should be noted, however, that these estimates did not include overheads of theAeronautical Telecommunications Network (ATN) protocols, which provedconsiderable (see Chapter 3.4)
3.1.5. The meteorological study
A major concern was the accuracy of meteorological forecasting and the effect thatthis would have on modelling and implementation of trajectories. For this reasonresearch was undertaken on the provision of an experimental short-term windforecasting model. The contracted partners for this were the UK MET Office and MeteoFrance, through the PHARE partners CAA/NATS and CENA respectively.
The project succeeded in developing a numerical prediction program, which uses astandard weather forecast as back plane, and updates it in real-time using aircraft-derived downlinked data to achieve an improved “now-cast”. The prediction programwas tested using recorded aircraft data with very promising results (Refs. 13, 14 and 15).The model was not used in real-time during the PHARE demonstrations. It isnoteworthy, however, that the higher the traffic density and the more downlinked dataavailable, the better the “now-cast ‘ prediction will be. The model is seen as a potentialsolution for future implementation.
PHARE Final Report Elements of the PHARE Programme
DOC 99-70-09 Version 1.0, Nov 1999 -23-
3.2. GROUND TOOLS DEVELOPMENT PROJECTS
3.2.1. PHARE Advanced Tools (PATs)
The PHARE concept required that air traffic controllers be supported by a set ofadvanced ground-based tools. These tools were known as the PHARE AdvancedTools, or PATs.
The tools were to provide automated support to controllers by integrating informationgenerated by the 4D FMS in the aircraft, with the aim of reducing controller workloadand increasing air traffic management system capacity.
A total of nine tools were developed, each of which is described in a separate volumeof the PATs final report (Ref. 77):
• Trajectory Predictor (Ref. 86)• Conflict Probe (Ref. 7799)• Problem Solver (Ref. 84)• Flight Path Monitor (Ref. (82)• Departure Manager (Ref. 81)• Arrival Manager (Ref. 78)• Co-operative Tools (Ref. 80)• Negotiation Manager (Ref. 83)• Tactical Load Smoother (Ref. 85)
The tools concept was built upon the capability of aircraft to follow an agreed 4-dimensional trajectory with a high degree of accuracy. The trajectory in the groundsystem would be identical to the trajectory in the aircraft flight management system,thus providing greater confidence in conflict detection (by the Conflict Probe) andresolution (by the Problem Solver), and greatly increasing flight safety. The groundsystem Flight Path Monitor would then monitor the aircraft flight and alert any deviationfrom the trajectory.
The Departure Manager and Arrival Manager provided sequencing and runway loadbalancing, the Problem Solver and Co-operative Tools aided problem solving anddeconfliction. The Negotiation Manager provided silent handover, ground-ground co-ordination and air-ground trajectory negotiation. The Tactical Load Smoothercalculated future airspace complexities, allowing a multi-sector planner to reducecomplexity, and thus reduce workload at sector planner level. The sector planner coulddeconflict the aircraft well before aircraft entered the sector, reducing the tacticalcontroller workload, whose task was then to monitoring aircraft with 4D FMS andactively guide only less well equipped aircraft. The process of complexity reduction,planning of flights up to 40 minutes before sector entry, and deconflicting up to 10minutes before sector entry, was called ‘layered planning’.
The nine PATs tools supplied all the functions required for the PHARE system,although there were some functional overlaps that could have been reduced by greatersharing of algorithms. All tools were used in all phases of flight in one or other of thePHARE demonstrations. However, there was no demonstration where all the toolswere integrated and running as a single toolset.
Elements of the PHARE Programme PHARE Final Report
-24- Version 1.0, Nov 1999 DOC 99-70-09
3.2.2. Ground Human Machine Interface (GHMI)
• Controller Working Position DesignThe objective of the GHMI project was to develop a next generation of controllerworking positions to be used in future ATM concepts (Ref. 57). It was responsible forthe delivery of Human Machine Interface (HMI) specifications. The work wasperformed by an international team that combined human factors specialists withengineers and operational experts. The resulting specifications were based on multi-disciplinary expertise, extensive user interaction and practical support provided bymeans of exploratory human factors studies.
The results of a task force on the expected role of man in future systems providedsome important starting points for GHMI project definition and its overall design goals(Ref. 11). In some exploratory part-task investigations, automated assistance to thecontroller was found to reduce his/her workload objectively, provided that the design ofthe tools was effective enough to be also usable under conditions of high traffic load.(In practice when pressure increased controllers tended to revert to tried and testedmethods or habits, and as a consequence sometimes stopped using the tools.)
The task assigned to the GHMI project was to design the human machine interface.Actual GHMI software production for simulations was the responsibility of thesimulation platform teams.
In PD/1 there was a close relationship between the GHMI team and the softwaredevelopers that led to a mutual understanding of the issues to be resolved. In thatsituation, text specifications were sufficient to allow the software designers to do theirwork. In later phases of PHARE, the specification and software development taskswere carried out more independently, and dedicated design and training teams wereformed.
Four main GHMI specifications were produced, one for each segment of flight, namelydeparture, en-route, approach and arrival, and multi-sector planner working positions.These were incorporated in GHMI specification documents for each of the PHAREdemonstrations: PD/1 (Ref. 54), PD/2 (Ref. 55) and PD/3 (Ref. 56).
• Controller TrainingThe GHMI project also took responsibility for developing controller training for thePHARE demonstrations.
The purpose of the training was twofold. First, it was necessary to familiarisecontrollers with the concepts on which the system is based, the use of the differenttools in the system, and its human machine interface. Second, it was important totransmit the message that the demonstrations addressed an experimental set-up, andnot a pre-operational system.
In PD/1 and PD/2 an integrated approach combining part task and full mission trainingwas applied using stand-alone systems.
The training for PD/3 took into account lessons learnt from PD/1 and PD/2. Acomputer-based training package was built for use on personal computers, and thisallowed participating controllers to familiarise themselves with HMI and systemconcepts in advance. Next they participated in part task training on stand-alonecontroller working positions, and performed team training, practising co-operativeworking and co-ordination procedures.
This integrated training approach proved essential for the success of the programme.
PHARE Final Report Elements of the PHARE Programme
DOC 99-70-09 Version 1.0, Nov 1999 -25-
3.2.3. Common Modular Simulator (CMS)
The main objectives of the Common Modular Simulator project were to:
• Provide a simulation and experimentation environment for new ATM concepts, insuch a way that software components could be identified, produced by individualparticipants as required and exchanged between them.
• Improve the flexibility and adaptability of real-time ATC simulators.• Permit closer collaboration between member establishments, and cross fertilisation
of research ideas through the exchange of software components.
Most of the effort within the CMS project was spent on an incremental definition ofstandard Application Programming Interfaces (APIs) to satisfy the requirements of thePHARE Advanced Tools, the Experimental Flight Management System and thePHARE Aeronautical Telecommunication Network (Ref. 51). This resulted in thedelivery of a set of ATM APIs that has since acquired the status of ‘de facto’ Europeanstandard, playing an important role in other European projects such as PATIO,CINCAT, DA VINCI and AVENUE (Ref. 52).
A second major product of the CMS project was the PARADISE prototype. This wasdesigned to serve as a validation test bed for the standard PHARE APIs. Whenintegrating ATM tools on such a platform, it was found important to observe three mainlevels: technical integration, functional integration and operational integration.
The PARADISE prototype was used to support the technical integration of PHAREAdvanced Tools for PHARE Demonstration 1. It was also used as the basis fortechnical, functional and operational integration for PHARE Demonstration 2.
As a result of time and budget pressures, two of the three partners running PD/3simulations decided to abandon the CMS approach in favour of local solutions. Thiswas expected to minimise integration problems.
More details on the CMS project can be found in Ref. 53.
3.2.4. Results of the ground tools development projects
The main aim of the tools was to provide automated support to the controller. Wherethe automation was seen as prescriptive or restrictive the controllers found itunwelcome. Where the automation assisted the controller but did not force actions orrestrict actions it was accepted much more readily. Controllers needed to be able totrust the automation before they were willing to abandon their current operationalprocedures. Trust cannot be forced on controllers: they will only give it when they areconfident in the tools. Such trust was quickly destroyed when the system failed, whenfor example the tools gave mismatching conflict warnings, or even when the toolscorrectly allowed something that was 'safe' mathematically but that would not normallybe allowed by a controller.
Some controllers were concerned about the impact of the tools on their 'skills',although most of them acknowledged that their role in a future system would change.It is possible that in future controllers may have to train in the use of degraded systemsin the same way as aircrew. These are not “problems” of the tools, but of thecontroller/tool relationships.
The PHARE Advanced Tools all individually achieved most of their aims. As tool setsin the demonstrations, the tools again achieved their aim of providing assistance to thecontrollers, although sometimes with reservations. Where operational procedures ofthe demonstrations were developed without regard to the new concepts and working ofthe PHARE tools the results were poor, with workload increases and indications ofother problems. However, where the operational procedures were defined to make
Elements of the PHARE Programme PHARE Final Report
-26- Version 1.0, Nov 1999 DOC 99-70-09
use of the tools as they were designed, the results were extremely encouraging, andindicated that such a system could support user preferred trajectories at traffic levelsexpected in 2015.
The GHMI designs used advanced features such as colour, windowing and softwaretools. Initially, such applications were regarded as highly experimental, but wereeventually generally well received and accepted.
Features such as direct object manipulation by graphical means was initially met withscepticism by some controllers, but perceptions improved as they became morefamiliar with the system. The role of the various training facilities was instrumental inachieving such positive acceptance. Much of the work has now been incorporated intoother programs such as EATCHIP. The FAA has also taken an interest in the results.
3.3. AIRBORNE TOOLS DEVELOPMENT PROJECTS
The PHARE Airborne Programme consisted of 2 main projects (Ref. 49), namely:
• Experimental 4D Flight Management System (EFMS), and• Advanced Airborne Human Machine Interface (AHMI)
These aimed to prove that integration of air and ground elements is possible, and thatthe information existing in the airborne systems can be exchanged with groundsystems via datalink.
3.3.1. Experimental Flight Management System
The EFMS was developed to demonstrate, in simulation and flight trials, thecapabilities of advanced FMS to:
• Predict 4D trajectories, taking into account possible ATC constraints and airlineoperating procedures;
• Negotiate this ‘user preferred trajectory’ with ATC via data link;• Guide the aircraft to that trajectory in space and time.
The airborne programme was managed by the EFMS Development Group (EDG), withrepresentatives from each R&D establishment together with a project manager fromEUROCONTROL. This group was responsible for the technical direction of theprojects, and for the activities of their respective development teams. The EDGreported to the PHARE Co-ordinating Committee.
The EFMS project had two main phases:
• Phase 1, split into Phase 1a for PD/1, and Phase 1b for PD/2;• Phase 2, a complete redesign for PD/3.For Phase 1, the EFMS software was developed at different sites by a mix ofaeronautical and software engineers. It became essential that a team of experiencedsoftware engineers completed the software analysis and design of the system, andalso integrated and tested the software modules produced by the partners. DERABedford was chosen as the integration site because of its established test facilities.This complete development cycle is thoroughly documented (Refs. 22 through 44).
For Phase 2, a redesign was necessary to meet the new requirement for two-crewoperation, and also to produce a more robust system for PD/3. New software forPhase 2 was developed by the integration team, whilst the research centres producedthe algorithms (plus any software specific to their aircraft), and conducted systemtests. Again this phase was well documented (Refs. 45 through 48).
PHARE Final Report Elements of the PHARE Programme
DOC 99-70-09 Version 1.0, Nov 1999 -27-
3.3.2. Airborne Human Machine Interface (AHMI)
In the beginning of the PHARE programme, the airborne human machine interfacework was performed as part of the EFMS development programme by representativesfrom DERA, EEC and NLR under leadership of DLR. They produced requirements forPD/1 and PD/2, made proposals for display formats and performed prototyping work(Refs. 16 through 20).
In Phase 2, the EFMS and HMI functionality were split and the Airborne HMI projectwas established as a separate entity with the same partners, under the projectleadership of NLR. The AHMI project was now tasked to provide a solution for two-crew cockpit operations, based on the Multi Cockpit Simulator (MCS) at EEC, whichwas chosen for AHMI trials and evaluation. PD/3 AHMI user requirements wereestablished (Ref. 19) and an airborne evaluation pilot briefing guide was produced (Ref.21).
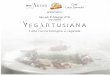
The AHMI programme allowed airline pilots to assess the airborne system in realisticcockpit environments as part of the PD/3 ATM experiment. Advanced NavigationDisplays (NDs) were developed to facilitate the pilot in the graphical construction andmodification of lateral routes and vertical profiles.
Figure 5: Navigation Display in lateral and vertical mode
The airborne pilot interface was designed for the planning and negotiation task of thepilot not-flying and the monitoring task of the pilot-flying. These tasks were carried outusing an interactive navigation display and a Control and Display Unit (CDU).
For AHMI evaluation the MCS was used in a two-crew configuration. The CDUs arelocated on the centre pedestal, primary flight display and ND are located in front of thepilot, and the trackball is located on the side panels near the side-stick. The trackballcontrolled the position of a cursor on the ND. Waypoints could be selected and/orremoved by moving the cursor soft buttons on the ND. The trackball also included abutton for selecting graphical objects.
Elements of the PHARE Programme PHARE Final Report
-28- Version 1.0, Nov 1999 DOC 99-70-09
Figure 6.: Multi-Cockpit Simulator with two-crew positions used during AHMIevaluation in PD/3
3.3.3. Results of the airborne program
The airborne programme was highly successful. The EFMS, with its Airborne HumanMachine Interface was used in three PHARE demonstration programmes using threereal aircraft and a flight simulator.
In PD/1, the BAC 1-11 of NATS/DERA was flown by company test pilots.
In PD/2, the VFW-614 of DLR (ATTAS) was flown by company test pilots.
In PD/3, the Cessna Citation II of NLR and the BAC 1-11 of NATS/DERA were flownby company test pilots. In addition the Multi-Cockpit Simulator (based on a Boeing747) of EEC was flown by several airline pilots.
The concept of 4D navigation was demonstrated to be readily achievable: cross-trackerrors of less than 100 metres; height errors of less than 500 ft. in climb and descent;time errors less than 10 sec. in cruise and descent (and less than 5 sec. in TMA). Theimpressive performance of the 4D guidance was, however, dependent on the accuracyof the forecast meteo data.
Direct manipulation of routes/trajectories on the navigation display was welcomed bythe pilots as a significant improvement on today’s systems, and the concept oftrajectory negotiation was quickly assimilated.
For datalink, PD/1 used the enhanced capabilities of Mode S (ground initiated comm.B messages), and PD/2 used a high-speed VHF data link. For PD/3 it was decided touse the experimental PHARE Aeronautical Telecommunications Network (PATN) withthe SATCOM subnetwork.
Datalink performance, however, remains a cause for concern. Trajectory negotiationhad been successfully demonstrated in PD/1 and PD/2. The introduction of thePHARE Aeronautical Telecommunications Network (PATN) in PD/3, with its complexdata structures and protocols, increased the volume of data transmitted considerably(from less than 0.5 kilobytes to 5 kilobytes). The SATCOM subnetwork could nothandle such volumes of data quickly, being restricted to a transmission of 128 bytes ata time, and so in PD/3 the trajectory negotiation process with real aircraft took, onaverage, between 4 and 6 minutes to complete.
PHARE Final Report Elements of the PHARE Programme
DOC 99-70-09 Version 1.0, Nov 1999 -29-
3.4. AIR/GROUND COMMUNICATION DEVELOPMENT PROJECT
3.4.1. PHARE Aeronautical Telecommunications Network
The PHARE Aeronautical Telecommunication Network (PATN) project was set up toprovide the telecommunications infrastructure for data-link services for PD/3. Theproject was carried out as a partnership led by CENA, with DLR, EEC, NATS/DERAand NLR (Ref. 50).
It was agreed from the start to base PATN components on the Standards andRecommended Practices that were being defined for the AeronauticalTelecommunication Network (ATN) by the International Civil Aviation Organisation(ICAO). As a result, the PATN project also helped provide its partners with an ATNvalidation platform. The main contribution of the PATN project was the development ofATN upper-layers that characterise ATN end systems. An ATN router component wasdeveloped in a different project (EurATN) and integrated in the PATN architecture.
The end systems provide the interface between the communications services and theuser data-link applications. Among the communications services provided by PATN isthe application service element for the Controller-Pilot Data-Link Communications(CPDLC) standardised by ICAO. Because of the experimental nature of the data-linkapplications used in PD/3, it was also the responsibility of PATN to design and developapplication service elements compatible with the ATN principles for three applications:
• Downlinking of Aircraft Parameters (DAP);• position reporting• trajectory negotiation data-link.These PATN components were deployed both in ground and airborne systems.
Figure 7.: PATN Overall architectureA complete configuration including an actual aircraft site (the DERA BAC 1-11), asimulated (static) aircraft, and ground systems was set up for PD/3 CENA.
SITA X.25 Network
NLR AmsterdamGround site
NATS/DERAGround site
NLR Citation aircraft
DERA BAC 1-11 aircraft
EEC BrétignyGround site
EEC MCS
CENAToulouse MCS
CENA Athis-Mons Groundsite
TranspacX.25 Network
Elements of the PHARE Programme PHARE Final Report
-30- Version 1.0, Nov 1999 DOC 99-70-09
3.4.2. Results of the PATN project
The PATN components performed satisfactorily. When considering the PATN upperlayers in isolation in communication with simulated air-traffic, these proved veryefficient in terms of computing power.
However the reliability and performances of ATN components could not be provenwhen the actual air-ground data-link, the Aeronautical Mobile Satellite Services(AMSS) mobile subnetwork, was exercised. As already mentioned in Section 3.3.3,this service was very unreliable during the limited time frame of the flight trials, and thisresulted in trajectory negotiation times of up to 6 minutes.
More work needs to be done (and has actually started) to evaluate the use ofcommercial datalinks for an integrated air/ground ATM system.
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -31-
4. PHARE DEMONSTRATIONS.
Building on experience gained in the national demonstration programmes and tool andfunction development, the PHARE Programme included a series of structured jointdemonstrations, performed in a task sharing arrangement between researchestablishments. The PHARE partners were encouraged to perform theseinvestigations according to standards, using commonly agreed evaluation andvalidation methods in such a way that results of demonstrations were comparable andthus generally acceptable.
Each demonstration envisaged a pilot phase (exploratory investigation) and a mainphase (structured investigation by measured trials).
A baseline demonstration with a standard set of conditions formed part of each mainphase demonstration and served as reference. A PHARE demonstration with a pilotand main phase took more than a year from start to finish. There were three majorPHARE Demonstrations, PD/1, PD/2 and PD/3 together with some extensions: PD/1+,PD/1++, PD/2+ and the PD/3 ‘continuation’ trials.
Figure 8.: PHARE Demonstration programme
PD/1+Tools and GHMIimprovement
PD/2+
Toolsimprovement
PD/1++Direct routinglarger sectors
98979695 99
IOCPEn Route & MSP
IOCPDeparture &En-Route
PD/2PD/2Arrival
PD/1PD/1En-Route
IOCPArrival
EATMS-OPTIONS
EATMS-OPTIONS
PD/3PD/3 CTCT
PHARE Demonstrations PHARE Final Report
-32- Version 1.0, Nov 1999 DOC 99-70-09
4.1. TRIALS DIRECTED AT EN-ROUTE ISSUES
4.1.1. PHARE Demonstration 1 (PD/1)
Figure 9.: Elements of PHARE Demonstration 1PHARE Demonstration 1 (PD/1) brought together research organisations from fourEuropean nations. The work programme was led by the National Air Traffic ServicesLtd. (NATS), a subsidiary of the UK Civil Aviation Authority, with the participation ofCENA of France, DLR of Germany, NLR of the Netherlands and the EurocontrolExperimental Centre at Brétigny. This was the first occasion in which Europe managedto co-operate in an extensive ATM research programme and demonstrate itscapabilities to a world-wide audience, and was considered a significant achievement.The PD/1 system was demonstrated in the autumn of 1995 on the NATS’ real-timeATC simulator, the NATS Research Facility, using 32 controllers from 7 countries. Theexperimental system included: advanced computer assistance tools; a live aircraft;simulated and real 4-D flight management systems (FMS); and an air-ground datalink.The aim was to explore the effectiveness of the negotiation of conflict-free trajectoriesand the reduction of the workload primarily of the tactical controller, but also of theplanning controller, and thus increase airspace capacity.
The PD/1 airborne demonstration programme, with the participation of the NATS-funded Defence Research Agency BAC 1-11, was extremely successful. It confirmedthe ability of an aircraft to agree conflict-free trajectories with ATC, and to fly thesetrajectories while operating within continuous 4-D constraints. The flights also provideda convincing demonstration to the aviation community of the ‘silent cockpit’.
The training programme showed that one week’s training was insufficient for thecontrollers fully to assimilate the new facility and concepts. This lack of training andfamiliarisation time may have influenced the results described below.
Controllers approved of the PD/1 trials environment. Fundamental aspects of thesystem were well accepted, such as electronic co-ordination and colour coding of trackdata blocks. The computer assistance toolswith human machine interface as shown infigure 10 received a mixed degree of controller approval. The primary planning tool,the Highly Interactive Problem Solver (HIPS), was particularly well received. Theagreed view of the controllers was that the tools and functions should continue to be
Bucking-hamshire
W.Yorkshire
Humberside
Lancashire
North Yorkshire
Cleveland
Durham
Tyne & Wear
Northumberland
Notting-hamshire
Lincolnshire
Norfolk
Derbyshire
W.Midlands
Shropshire Staffordshire
Cheshire
Greater Manchester
S.Yorkshire
Essex
HertfordshireHereford & Worcester
Warwickshire
Leicestershire
Bedfordshire
Cambridgeshire
Northhamp-tonshire
Suffolk
OTR
PAM
SPY
UNIDO
MONIL
TOPPA
MULIT
ELDIN
LONAM
SKATE
BLUFA
GABAD
DOGGA
BEENO
KOMIK
SPRAT
ABSIL
SOTOL
FAMBO
KIPPA
ANGEL
KOLEY
SILVA
GOLESUPTON
DENBY
POL
SAMON
SCOTTISH
COPENHAGEN
AMSTERDAM
MAASTRICHT
LONDON
SECTOR10
SECTOR11/33
MANCHESTER
LONDON
UB1
UB1
UB1
UB105
UA37
UA37
UB4
UL7
UL7
UA5
UL74
UB5
BARTN
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -33-
developed. This requirement to further develop the tools was to be expected, since thePD/1 system was experimental rather than pre-operational.
Figure 10: The PD/1 display with the Highly Interactive Problem Solver
Plan view display HIPS speed view Selected aircraft
ADFL Track Data Block HIPS vertical view HIPS horizontal view
PHARE Demonstrations PHARE Final Report
-34- Version 1.0, Nov 1999 DOC 99-70-09
The statistical analysis showed little evidence of a change in airspace capacity.However, the study of capacity measures highlighted two important issues: thequestion of whether, under the operational concept examined, the controller needs tomaintain the same level of awareness of the ATC picture as in today’s system; and therepresentation of aircraft separation on the controller’s display. It was concluded thatfurther addressing these two issues would improve the chances of capacity gains.
In summary, PD/1 was considered to be a major, successful demonstration of theintegration of air and ground air traffic management, in en route airspace, throughcomputer assistance tools, 4-D FMS and air-ground datalink. The evidence suggestedthat gains are achievable in controller workload, airspace capacity and quality ofservice to airlines.
PD/1 is extensively reported in Ref. 91.
4.1.2. PHARE Demonstration 1+ (PD/1+)
A follow-on experiment from PD/1, known as PD/1+, was carried out by NATS as aclarification project for PHARE Demonstration 3. The aim was to re-examine theoutcome of PD/1, and to identify potential improvements to the PHARE advancedtools, ground human machine interface and procedures. The PD/1+ trial took place inJanuary and February 1997 at the Air Traffic Management Development Centre, Hurn.The airspace simulated was based on the two UK New En Route Centre sectors 10and 11/33, each sector being staffed by one planning controller and one tacticalcontroller. Eight London Area and Terminal Control Centre (LATCC) controllersparticipated in the trial. The main aim of the PD/1+ trial was to compare workload andtool use between PD/1 and a modified PD/1 system, following the implementation of anumber of changes to tools, interface and procedures.
In summary, the conclusions are that the modifications reduced overall workloadcompared to the baseline of PD/1. The changes made to the Highly Interactive
Problem Solver no-go zones and the Communications List Window made the biggestcontribution to this reduction. Increased familiarity with the system as the trialprogressed also played an important role.
PD/1+ is reported in Ref. 92.
4.1.3. PHARE Demonstration 1++ (PD/1++)
The NATS PD/1++ project was a continuation of the previously conducted PD/1 andPD/1+ trials, and was designed to explore the use of the PHARE tools and operationalconcept within alternative en-route airspace structures and controller practices.
The following concepts were explored, initially through the use of fast-time simulationsand subsequently by means of a real-time simulation conducted on the NATSResearch Facility:
• the introduction of aircraft flying direct routes within an airspace containing aircraftflying on traditional, structured routes;
• the use of larger sectors compared to those typically used in current day airspacedesigns;
• the introduction of alternative controller operating practices.
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -35-
The baseline scenario against which these concepts were compared included theintroduction of Reduced Vertical Separation Minima (RVSM) and the availability of thePHARE Advanced Tools (PATs) to the controllers.
The PD/1++ real-time trial took place in late August 1998. The airspace simulated wasbased on the two UK New En-Route Centre sectors 10 and 11, each sector beingstaffed by one planning controller and one tactical controller. Eight controllersparticipated in the trial.
Figure 11.: Lay-out of the NATS Research Facility for the PD/1++ trial
The major conclusions from PD/1++ are that, within the very specific scenariosinvestigated:
• the PD/1++ operational concept enabled the controllers to handle the increasedtraffic that resulted from the introduction of larger sectors and direct routes;
• the increase in traffic resulted in an increase in controller workload that was withinthe controllers’ acceptable working limits.
However, it cannot be stated which elements of the operational concept underinvestigation – i.e. RVSM, PATs, direct routes or larger sectors – led to the controller’sability to successfully manage the traffic.
Within the limits described above, it may be stated that the PD/1++ trial successfullyachieved that part of the PHARE objective designed to “demonstrate the feasibility andmerits of an air-ground system” for the en-route phase of flight.
The main recommendations from the PD/1++ trial were that further work should becarried out in the following areas:
• understand the effect on controller workload and sector capacity of the introductionof either direct routes or larger sectors;
PHARE Demonstrations PHARE Final Report
-36- Version 1.0, Nov 1999 DOC 99-70-09
• understand the relationship between controller workload and both sector capacityand total airspace capacity (ie groups of sectors) before conclusions can be drawnfrom the PHARE programme with respect to either;
• establish appropriate controller roles for a PHARE type environment;• refine the method by which aircraft without datalink are controlled within a PHARE
type concept.
PD/1++ is extensively reported in Ref. 93.
4.2. TRIALS DIRECTED AT ARRIVALS IN THE EXTENDED TERMINAL AREA
4.2.1. PHARE Demonstration 2 (PD/2)
PD/2 formed the second major real time simulation exercise in the PHARE series. Thework programme of PD/2 to design, implement, and demonstrate the PHAREprototype air and ground computer assistance tools for air traffic management in theextended terminal area (ETMA) was led by the Deutsches Zentrum für Luft- undRaumfahrt (DLR). The participating partners were CENA of France, NATS of UK, NLRof the Netherlands, and the EUROCONTROL Experimental Centre at Brétigny (EEC).
The PD/2 system was run on DLR’s real-time simulator ATMOS (Air TrafficManagement and Operations Simulator), using 32 controllers from 7 Europeancountries. The system incorporated advanced controller assistance tools with anassociated ground human-machine interface (GHMI) designed in the PHARE GHMIproject. Originally, it was planned to integrate a fully working arrival managementsystem with advanced arrival management tools performing arrival time prediction,sequencing, approach problem solving and 4D descent management during the wholearrival phase. Due to system limitations, however, no trajectory renegotiations werepossible once the aircraft was in the TMA.
The airborne component of the experiment was evaluated by integrating the DLRAdvanced Technologies Testing Aircraft System (ATTAS) Experimental Cockpit,simulating air-ground datalink and 4D EFMS.
Figure 12.: Elements of PHARE Demonstration 2Six pilots participated in an evaluation of the PD/2 on-board components developed inthe PHARE airborne human-machine interface (AHMI) project. The ability of an aircraft
Planner
Pick-up
Feeder
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -37-
to fly negotiated trajectories in a routine manner while operating on its inbound routedown to the approach gate within continuous 4D tolerances, was convincinglydemonstrated.
All participating controllers undertook a training programme of one-week, whichenabled them to practice their roles for PD/2 in a reference baseline mode with paperstrips based on current practice, as well as in the PHARE advanced tools mode.
During more than one hundred hours of simulation, a variety of performance andworkload measures were recorded. Audio and video documentation, observer logs,debriefing sessions, and questionnaires were used for PD/2 data collection.
The controllers considered the training to be sufficient and thought the simulation set-up to be realistic and valid. The PD/2 GHMI gained a high degree of controllerapproval, with significant acceptance of display principles such as colour coding ofaircraft labels, and an equally high acceptance of the interaction principles, such asuse of mouse for on-screen interaction with aircraft labels and pop-up menus.
Figure 13.: PD/2 Arrival Management display
Quantitative analysis of system performance data revealed various gains from theintroduction of the PD/2 PATs and GHMI in terms of traffic throughput and quality ofservice. Overall, benefits were achieved for the number of landings per unit time,average flight time of aircraft, inbound delays, and time precision of deliveryparticularly under conditions of high traffic load. Analysis of the wake vortex categoryseparations measured at the approach gate showed that these benefits were notachieved at the expense of closer separation.
4-D / class A
heavy
3-D / class B
planning time SAB513: 10:28:20
actual time: 10:15
aircraft planned for runway 25L aircraft planned for runway 25R
label colour yellow:arrival via PSA label colour blue:
arrival via GED
label colour green:arrival via RUD
actual time at GATE: 10:15
delay pointer
PHARE Demonstrations PHARE Final Report
-38- Version 1.0, Nov 1999 DOC 99-70-09
Another general point was that, in parallel with improvements gained in the advancedsystem, the variability of the measurements was considerably reduced. Controllerteam performances and work styles became more homogeneous, and thus morepredictable.
It is concluded that improvements in traffic throughput and quality of service wereachievable with the advanced ground system alone. The introduction of 4DFMS/datalink aircraft which automatically followed their negotiated trajectories in twosteps of 30 % and 70 % of equipped aircraft, resulted in considerably higherpercentages of aircraft which were delivered at the approach gate exactly on theirplanned time.
Statistical analysis of controller workload revealed some re-distribution betweentactical controller positions as a result of the introduction of PD/2 PATs and GHMI. It isimportant to note the observed decrease of workload at the approach pickup controllerposition, since this was the position with relatively the highest workload underreference baseline conditions. Furthermore, the introduction of 30 % and 70 % 4DFMS/datalink aircraft in the traffic sample showed a stepwise reduction of workload forall tactical controller positions involved.
The effect of releasing the controllers from the duty of transferring ATC instructionsgave significant reductions in all objective workload measures at all controller workingpositions irrespective of traffic volume. It can therefore be concluded that workloadfrom merely guiding traffic strongly decreased as the proportion of 4D FMS/datalinkequipped aircraft increased.
In summary, PD/2 was a successful demonstration of the integration of advancedtools, 4D FMS and datalink into an air-ground air traffic management system in anextended terminal area airspace. Experimental evidence suggests that the PHAREconcept of trajectory-based traffic guidance provided by the advanced tools andhuman/machine interfaces was approved by the controllers and pilots, and that it hasthe potential for improving traffic throughput and quality of service, at acceptable orreduced levels of controller workload.
PD/2 is extensively reported in Ref. 98.
4.2.2. PHARE Demonstration 2+ (PD/2+)
The PD/2+ project was run by NATS as an internal operational clarification project forPHARE Demonstration 3, designed to gain a more thorough understanding of arrivalmanagement concepts and interactions between controller positions, than had beenpossible during the PD/2 trial. Specifically, the aim of the project was to use the PD/2PHARE Advanced Tools, primarily the Arrival Manager, with further development toachieve full functionality in the terminal area. Additional enhancements included:staffed en route sectors; missed approaches; holds and arrival rates approachingrunway capacity. These enhancements were to be evaluated through the ‘PD/2+ trial’,a real-time simulation on the NATS Research Facility.
The PD/2+ trial took place in September and early October 1997 at the Air TrafficManagement Development Centre, Hurn. The NATS Research Facility wasconfigured to simulate as closely as possible Frankfurt approach and the surroundingairspace. The approach sectors were staffed by one arrival sequence planner, onepickup controller and one feeder controller, the en route sector by one planningcontroller and one tactical controller. Ten London Area and Terminal Control Centrecontrollers participated in the trial.
Development of the PD/2+ trial platform and both the baseline and advanced conceptsof operation within the agreed timescales was a significant challenge. Because somesystem and concept problems remained unresolved at the start of the PD/2+ trial, a
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -39-
second baseline was introduced, in which the system remained the same but paperflight strips were incorporated to record information instead of the aircraft labels. Theaim of the PD/2+ trial was therefore adjusted accordingly to compare controllerworkload, airspace capacity, quality of service system usability, between a baselinewith paper flight strips and one without. In addition the workload, airspace capacity,quality of service and system usability associated with an advanced conceptincorporating an arrival manager were examined. In both cases this was achievedthrough the collection and subsequent analysis of both subjective and objective data.
The experiments concluded that the workload experienced by controllers whenworking without paper flight strips was greater than that experienced when workingwith a system representative of current day operations. Thus the mainrecommendation for PD/3 was that any baseline used must be fully representative ofcurrent day operations, both in terms of the system, concept and staffing levels ifmeaningful comparisons are to be made with any advanced concept. In addition, inany advanced system, the roles and responsibilities defined, coupled with thecomputer assistance tools provided, must provide the controller with the ability topotentially increase capacity, whilst maintaining a safe and expeditious flow of traffic.
PD/2+ is reported in Ref. 99.
4.3. TRIALS DIRECTED AT ALL FLIGHT PHASES
4.3.1. Evolution of PHARE Demonstration 3
PD/3 concentrated on the air and ground systems available in the 2005-2015 timescale and addressed the influence of different controller working methods. It broughttogether en-route and Extended TMA results, defining the work to encompass a seriesof full multi-sector/multi-centre demonstrations. PD/3 proposed a set of operatingprocedures based on previous results obtained in the programme.
The original objectives of PD/3 can be summarised as follows:
• demonstrate feasibility of introducing multi-sector planning in association with 4Dtrajectory negotiation, in en-route and ETMA environments;
• validate compatibility of the controller/automated system with the trafficorganisation planning philosophy;
• validate compatibility of the pilot-automated system with the operational concept;• validate interface between the various en-route and ETMA modes of operation and
planning tools;
• assess and compare quality and performance (e.g. capacity gain and relativecontroller workload reduction), assess the potential advantages and drawbacks ofthe different concepts and associated tools;
• propose directions and improvements for further experiments and demonstrations;• gain experience from the co-operation of several European ATM research
establishments;
• have available at the PHARE establishments simulation facilities supporting furtherresearch into and validation of ATM concepts for EATMS.
Although initially defined as a multi-site demonstration involving several interconnectedsites, the PD/3 demonstration was finally run as a “plural-site” demonstration. Thisimplied validating different and complementary aspects of the evaluated concepts in aco-ordinated way on three sites:
PHARE Demonstrations PHARE Final Report
-40- Version 1.0, Nov 1999 DOC 99-70-09
• CENA at Athis-Mons focussed on departure aspects• NLR at Amsterdam focussed on arrival aspects• EEC at Brétigny undertook a gate to gate evaluation
The results of each of these demonstrations will be described in the next sections.
4.3.2. PHARE Demonstration 3 at CENA
The CENA PD/3 work took place in Athis-Mons, France involving 27 controllers fromvarious countries (USA, Romania, Germany, France).
It was performed in an operational environment gathering a TMA/departure sectorincluding Paris CDG Airport, an ETMA/departure sector and an en-route sector,thereby covering areas left unexplored by previous PHARE Demonstrations.
Figure 15.: En-route/ETMA and Departure Controller Working PositionsIt evaluated a future ATM concepts including air-ground integration, advanced tools tosupport the controllers and a transitional introduction of 4D FMS and data-linkequipped aircraft. The aim was to explore the effectiveness of concepts in anenvironment where the man stays in the process of decision-making, so following a« human centred approach ».
Acces to RadarToolbox
APD with 1problem
Radar Image inTEPS MODE
Sector InboundList
TrajectorySupport Tool
PHARE Final Report PHARE Demonstrationse
DOC 99-70-09 Version 1.0, Nov 1999 -41-
Figure 16.: CENA Athis-Mons Controller Working Position simulation facility
The CENA evaluations included a successful airborne demonstration with the DERABAC1-11 live aircraft equipped with an EFMS. It showed the ability of an aircraft toestablish an air/ground connection through the PATN network using the INMARSATsatellite. It used data-link before take-off, and during the flight used the EFMScapabilities to manage 4-dimensional routes and carry out 4D trajectory negotiationwith the ground systems.
The CENA PD/3 training programme met its objectives. The controllers fullyunderstood the underlying concepts of PD/3, and were able to participate intelligentlyin discussions about the system. It proved necessary to have, in addition to theinstructors, technical experts who were capable of answering controllers’ operationaland technical questions. As always, for some controllers more training andfamiliarisation with the simulated airspace (traffic flows and rules) would have beenprofitable.
Controllers generally accepted the PD/3 concepts well, but emphasised that systemperformance problems (resulting in long response times) prevented them from fullyevaluating the novel concepts and procedures that were proposed.
Concerning increase in airspace capacity, which was the main interest of the overallPHARE programme, results were mixed because the introduction of the computerassistance tools induced a direct increase in workload, especially at planning controllerpositions. Controllers agreed that both advanced procedures and introduction of data-link equipped aircraft fitted well with planning controller activities, and felt thatoptimising traffic and managing conflicts in advance could be useful. However, theyexpressed concern about the difficulties that tactical controllers encountered inhandling non-equipped aircraft, and expressed a feeling of being powerless whenmonitoring the data-link equipped aircraft (they reported difficulties to mentallyintegrate these aircraft into the overall traffic, which they called “losing the picture”).
PHARE Demonstrations PHARE Final Report
-42- Version 1.0, Nov 1999 DOC 99-70-09
For the tactical controller, spared time from VHF communications was generally wellappreciated when the proportion of data-link aircraft reached a significant level (70 %).A common issue for both planning controller and tactical controller was the cleardivision of responsibilities between them that led to a real lack of co-operation. Thisphenomenon was called the ‘operational gap’.
As in PD/1, there was little evidence of a measurable change in airspace capacity.Objective measures of minimum safe separation infringements provided issues of realinterest: whereas computer assistance and a significant level of equipped aircraft bringsome improvement in traffic throughput, this also resulted in an increase in either thenumber of infringements or their duration. Controller comments suggested that the factthat the tactical controller could lose the mental picture of the traffic could sometimesjeopardise safety.
Analysis of quality of service results remains difficult. Some small improvement intraffic throughput was observed. However, this is only valid for the simulated departureto en-route phase and should rather be evaluated in a complete simulation of an entireroute from departure to destination.
The principle of computer assistance was well received by the controller: in particularthe inclusion of tools like Co-operative Tools and Highly Interactive Problem Solver onthe en-route planning controller position offered a powerful evaluation environment. Onthe departure position, the first acquaintance of controllers with a departure managercreated great interest, with some controllers requesting an in-depth evaluation of thistool in a more realistic, present-day environment.
Recommendations for future ATM projects using PHARE concepts are that theyshould:
• explore ways to simplify air-ground trajectory negotiation and propose atsector level, procedures which take account of time pressures (could bederived from CPDLC or formalised clearance methods);
• explore ways to define a new controller role for multi-sector planning capableof efficiently using air-ground trajectory negotiation for rerouting andsimplifying the traffic ;
• work to obtain system response times as short as possible, a reliable overallsystem as well as logical and clear system responses;
• limit automation to elements that can be trusted by controllers, and provideco-operative system functions allowing the controller to remain master of thesystem;
• study new concepts and future systems taking into account significant nonnominal events;
More general recommendations for continuation of research by means of large scaleATC experiments are that they should:
• benefit from the techniques used in the preparation of this experiment to teachcontroller trainees f