Embed Size (px)
Citation preview

Perpetual growth, distribution, and robots
Citation for published version (APA):Nomaler, Z. O., & Verspagen, B. (2018). Perpetual growth, distribution, and robots. (UNU-MERIT WorkingPapers; No. 2018-023). Maastricht University. https://www.merit.unu.edu/publications/working-papers/abstract/?id=7724
Document status and date:Published: 17/05/2018
Document Version:Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:[email protected] details and we will investigate your claim.
Download date: 16. Nov. 2020

#2018-023
Perpetual growth, distribution, and robots Önder Nomaler and Bart Verspagen
Maastricht Economic and social Research institute on Innovation and Technology (UNU‐MERIT) email: [email protected] | website: http://www.merit.unu.edu Maastricht Graduate School of Governance (MGSoG) email: info‐[email protected] | website: http://www.maastrichtuniversity.nl/governance Boschstraat 24, 6211 AX Maastricht, The Netherlands Tel: (31) (43) 388 44 00
Working Paper Series

UNU-MERIT Working Papers ISSN 1871-9872
Maastricht Economic and social Research Institute on Innovation and Technology UNU-MERIT Maastricht Graduate School of Governance MGSoG
UNU-MERIT Working Papers intend to disseminate preliminary results of research carried out at UNU-MERIT and MGSoG to stimulate discussion on the issues raised.

PerpetualGrowth,Distribution,andRobots
ÖnderNomaler1andBartVerspagen2
1EindhovenCentreforInnovationStudies(ECIS),[email protected]
2UNU‐MERIT,[email protected]
Versionof17May2018
Abstract
The current literatureon theeconomiceffectsofmachine learning, robotisationandartificialintelligencesuggeststhattheremaybeanupcomingwaveofsubstitutionofhumanlabourbymachines(includingsoftware).Wetakethisasareasontorethinkthetraditionalwaysinwhichtechnologicalchangehasbeenrepresented ineconomicmodels. Indoingso,wecontribute tothe recent literature on so‐calledperpetual growth, i.e., growth of per capita incomewithouttechnologicalprogress.Whentechnologyembodied incapitalgoodsaresufficientlyadvanced,percapitagrowthbecomespossiblewithanon‐progressingstateof technology.WepresentasimpleSolow‐likegrowthmodelthatincorporatestheseideas.Themodelpredictsarisingwageratebutdecliningshareofwageincomeinthesteadystategrowthpath.Wepresentsimulationexperimentsonseveralpolicyoptionstocombattheinequalitythatresultsfromthis,includingauniversalbasicincomeaswellasanoptioninwhichworkersbecomeownersof“robots”.
Keywords:perpetualeconomicgrowth;economiceffectsofrobots;incomedistribution
JELCodes:O41,O33,E25,P17
We thank Luc Soete, Thomas Ziesemer, Adriaan van Zon and participants at the UN ExpertGroupMeeting on “Accelerated Technological Change, Artificial Intelligence, Automation andtheir Implications for Sustainable Development Targets” (Mexico City, 26‐27 April 2018) forcommentsonanearlierversion.Theviewsexpressedandanyremainingerrorsremainsolelyourown.

1
1.Introduction
Discussions about new technologies replacing labour are as old as the economics academicdiscipline. FreyandOsborne (2017, p. 256)quoteQueenElizabeth I ofEngland speakingoutagainst an innovativeknittingmachine, in supportofher “poor subjects”. FreemanandSoete(1994) quote David Ricardo entertaining the view that “the employment of machinery isfrequentlydetrimentalto[the]interests”oftheworkingclass.Inthissense,therecentdebateon the expected impact of advanced computer technologies replacing labour is not new (e.g.,FreyandOsborne).
The effects of new technologyon employmentwill likelyplayout in termsof thequantity oflabourdemanded(employment)andthepricepaidforlabour(wages)(Katsoulacos,1986).Thetotal employment effects of technological innovation will consist of both direct effects (e.g.,introductionoflabour‐savingmachines)andindirecteffects(e.g.,increaseddemandforlabourdue to increasedproductdemandas a result of a fall inpricesdue to the innovation, or as aresultofproduct innovation).Economictheoryandmodelsexisttoanalysetheinterplay(andnet effect) of these direct and indirect effects, as well as the impact of wages of workers ofvariousskill‐levels(Vivarelli,1995;FreemanandSoete,1994;Katsoulacos,1986).
If“robots”andsimilartechnologiesaresimilartopreviouswavesofinnovationwithrespecttotheirimpactonthelabourmarket,wemaywellapplythisbodyoftheorytotherecentdebate.By and large, we could then conclude that even if labourmarket adjustmentwill take a fairamount of time (up to decades), jobswill not disappear in the long run, because of indirectcompensationeffectsofvariouskinds(FreemanandSoete,1994;Autor,2015;Bessen,2016).However,aswewillargue inthenextsection, therearereasonstoassumethatthe impactoftechnologiessuchasmachine learning, robotsandartificial intelligencewillbedifferent frompreviouswavesoftechnologicalchange,becausetheirpotentialtosubstitutelabourforcapitalisveryhigh,andtheymayhaveadverseeffectsonlabourincome.Onetheotherhand,itisalsoclearthatthesetechnologieshaveahighpotentialtocreate(extra)economicgrowth.Aswewillshow in the model that we develop below, they may in fact give rise to so‐called perpetualgrowth, which takes place by investment in capital only (i.e., no further investment intechnology).
Thisclearlyputstheissueofreplacementoflabourbytechnology(embodiedincapital)intherealmof economic growth.Obviously, technological change has long been considered amaindeterminant of economic growth (e.g., Nelson andWinter, 1982; Lucas, 1988; Romer, 1990;SilverbergandVerspagen,1994).AcemogluandRestrepo(2017)presentamodelofeconomicgrowthinwhichtechnologycaneithertaketheformofautomating(replacing)humanlabour,or create new “tasks” that contribute to production and can only be performed by humans.Althoughtheirmodelpotentiallyyieldsagrowthpathinwhichallhumanlabourisreplacedbycapital, the emphasis of their analysis is on a growth path in which the two types oftechnologicalchangebalanceeachotherout.Intheirmodel,“therearepowerfulself‐correctingmarketforcespushingtheeconomytowardsbalancedgrowth(…)forexamplethearrivalofaseriesofnewautomationtechnologies,willsetinmotionself‐correctingforces(…)therewillbean adjustment process restoring the level of employment and the labour share back to theirinitialvalues”(p.28).

2
Ourinterest,ontheotherhand,isinthesituationwherethelabour‐replacingtechnologiescometodominatetheeconomy,andcreateperpetualgrowthasdescribedabove.Whetherthiswillbethe case is a matter of technological foresight, in which we do not engage beyond a briefsummary of some of the debate thatwewill provide in the next section. The interest of ouranalysis is therefore mainly in exploring the potential consequences of one of the possibletechnologicalscenarios,i.e.,thatinwhich“robots”1willreplacenotonlyhumanlabourbutalsotechnologicaldevelopmentasthemainsourceofgrowth.Wewillaskwhatgrowthlookslikeinsuch a scenario,what the consequences for labour income and inequalitywill be, andwhichpotentialpoliciesmaybeeffectuatedforcombattinginequality.
Theremainderofthispaperisorganisedasfollows.Inthenextsection,wewillbrieflydiscusstheexistingliteratureontheeconomicimpactofrobot‐technology.Wewill focusontheworkthattriestoassessthedegreetowhichhumanlabourwillbecomesubstitutablebyrobotsandrelatedtechnologies.Wewillalsobrieflytouchuponthewayinwhichthisformoftechnologicalchangecanbeanalysedineconomicmodels.Section3willpresenttheproductionfunctionthatwill be the basis of ourmodel. Itwill describe how themicro foundations of the productionfunctionmay be related to the findings in the literature surveyed in Section 2, and how thisproduction function changes our traditional outlook on the way technological progressinfluencesproduction.
Section 4will show how the production function is embedded in a simple growthmodel. InSection5,weanalysethemodeltoinvestigateunderwhatconditionsgrowthwillemerge,andhowthegrowthratecanbequantified.Thisanalysissuggests that thatgrowthcan indeedbe“perpetual”.Section6willalso lookat thedynamicsof the labour incomeshareandthewagerate,bothalongthesteadystateofperpetualgrowth,and in the transient towardsthesteadystate.Section7exploressomeoptionsforcombattinginequalitythatmayresultfromperpetualgrowth, by means of a social protection policy. The analysis here is by means of numericalsimulations. Section8 summarises theargument,drawssomeconclusions, andoutlines someavenuesforfurtherresearch.
2.Capital,labour,androbots
Thepre‐publicationversionofFreyandOsborne(2017)sparkedadebateabouttheextentofthefutureimpactofautomationonemploymentandlabourmarketsingeneral.Theyconcludethat “47% of total US employment is in the high‐risk category, meaning that associatedoccupations are potentially automatable over some unspecified number of years, perhaps adecade or two” (p. 265). Here, “automatable” or “automation” means that human labour issubstitutedby capital goods, inparticular computers including the software thatmakes themrun.FreyandOsborne identifymachine learning(ML)andmobilerobotics (MR)as twomaintechnologicaldevelopmentswithapotentiallyhighimpact.TheyviewMLasawaytoautomatecognitivetaskspreviouslyperformedbyhumanlabour,andMRasawayofautomatingmanualwork(p.258).They followAutoretal. (2003) inapplyinga two‐waycategorisationof labourtasks, i.e., routine vs. non‐routine tasks and cognitive vs. manual tasks, and argue that thedomainofnon‐routine(i.e.,non‐automatable)tasksisrapidlyshrinking.
1Weuse the terms“robots” tocolloquiallyrefer toasetof technologies thatFreyandOsborne(2017)describeas“machinelearning”.Seethenextsection.

3
Arntzetal.(2016)modifytheFreyandOsbornemethodologyofestimatingautomationriskforemployment.FreyandOsborneestimatetheriskforeachofasetof702occupations,andthencounthowmanypeopleareemployedintheoccupationsthatemergeas“highrisk”.Arntzetal.argue that this approach pays too little attention to the fact that although people may beemployed in the same occupation, theymay still spend different amounts of time on specifictasks.Forexample,onelawyermayspend50%ofhertimeassessinglegaldocumentsinawaythat could be done by an intelligent computer programme,while another lawyermay spendonly10%ofhistimeonthistask.Theyhavedataattheleveloftheindividualworker,andhenceareabletoestimatetheautomationrisk foreveryworker in theirdataset,ratherthanforthestandardsetofoccupationsthattheseworkershave.Theirresultsshowamuchlowershareofworkers at high risk,which is defined similarly to Frey andOsborne as a70%probability ofbeingautomated.TheirestimatefortheUSislessthan10%ofemploymentbeingathighrisk,vs.the47%ofFreyandOsborne.ThecountrieswithmaximumriskintheresultsbyArntzetal.(2016)areAustriaandGermany,with12%.
NedelkoskaandQuintini(2018)extendtheanalysisofArntzetal.(2016)andfindthatSlovakiais the country with the largest share of jobs at high risk, at 33%. They also provide moredetailed numbers of the actual probability of automation risk, and find that themedian is at48%riskofautomation(themeanis47%,andthestandarddeviationis20%).Chuietal.(2016)focus entirely on tasks carried out in the work environment, rather than on jobs andoccupations(whichareessentiallypackagesoftasks),andestimatethatintheUS,thethreesetsoftasksthatareathighestriskofbeingautomatedcompriseatotalof51%oftotaltimespent.Theirriskofautomationvariesbetween64%and78%.
Thus, although the actual extent of automation risk clearly depends on the method used toestimate this risk, we may still conclude that this risk is substantial. Even the conservativemethod(NedelkoskaandQuintini)findsamedianormeanriskthatisneartoabouthalf,whichmeansthatoneoutofeverytwoworkersintheirsetofdevelopedcountriescouldbeautomatedinthenot‐so‐far‐awayfuture.
Howshouldwe thinkabout this formof technological changeand the impact itmayhaveonfuture economic relations?Oneway that economistshave lookedat technologicalprogress isthat it is a major force for increasing the productivity of human labour, which in technicalparlouriscalledfactor‐enhancingtechnologicalprogress.Althoughwemayidentifynumerousexamplesof this tendency in thehistoryof technologicalchange,FreyandOsborneandothercontributorstothedebateclearlyhavesomethingdifferentinmind.Theriskofautomationthatthey consider is the risk of human labour being completely substituted by technology(embodied inmachines), i.e., a specific production task being carried outwithout any labourinput.PerettoandSeater(2013)callthisfactor‐eliminatingtechnicalchange.
Wemayconsiderabasicexampletoillustratethisdistinctionfurther.Abasicshovel,probablymade of some kind ofmetal, greatly improved human productivity in the production task ofmovingearth(digging).Theinventionofmechanicaldiggers,firstpoweredbysteamandlaterbyfossilfuels,againgreatlyimprovedproductivityinthistask.Ahumanoperatingamechanicaldigger canmovemuch larger amounts of soil in a fixed amount of time than a single humanusingashovel,whocaninturnmovelargeramountsthanahumanusingjustbarehands.Theshovel and the mechanical digger are pieces of capital that embody technology thatcomplementshumanlabourbymakingitmoreproductive.Someworkersmaylosetheirjobsas

4
shovel operators when mechanical diggers are introduced, or as bare hand diggers whenshovels are introduced. Therefore these pieces of equipmentmay, at the same substitute forhumanlabour,dependingontotaldemandintheindustry.Workersthataresubstitutedinthisway may, in the longer run, as a result of indirect effects such as an increased demand fordigging services, be re‐employed (after acquiring new skills) as operators of the newtechnology.Inthiscase,theywilltendtoendupbeingbetter‐offduetohigherwagesthatreflecthigherproductivity.
Under the influenceofmachine learning,however, themechanicaldigger couldbemadeself‐operating,justasautonomous(self‐driving)carsarenowbeingdeveloped.Suchanautonomousdiggerwouldsubstituteentirelyforhumanlabour,andthetaskofmovingearthcould,underatleast some circumstances, be carried outwithout any input of humans. This ultimate step intechnological progress (robotisation) is very different than those before, since it puts theworker out of a job without any perspective of being re‐employed in the digging business.Therefore,italsoreducesworkers’welfare(income),unlesstheworkerhassomeshareintheownershipofthemechanicaldiggersortherobotoperators(wewillreturntothisownershipissuebelow).
Our analysis here will be entirely aimed at exploring the consequences of widespreadautomation for human material welfare. The analysis will consider the consequences of theformoftechnologicalprogressthatsubstitutesforlabour.Wewillnotconsiderhowthisformoftechnologicalprogresscomesaboutendogenously,butinsteadassumethatitwill(soon)reachastateinwhichitcanstarttoplayamajorroleintheeconomy,i.e.,whatPratt(2015)callsa“Cambrianexplosionforrobotics”.
Two main issues motivate our work. First, factor‐eliminating technological change creates astrong potential for economic growth. In particular, itmay change the game of technologicalprogresscompletely.Factor‐augmentingtechnologicalprogressrequiresaconstantinvestmentinresearchanddevelopmentorscience(e.g.,Romer,1990),orhumancapital(e.g.,Lucas,1988).Butafterreachingacriticallevelofadvancementinfactor‐eliminatingtechnologies,investmentintechnologyorknowledgewillnolongerbenecessarytokeepgrowthgoing.Instead,growthcanbe sustainedmerelyby further investment in theultimately‐conceived capital vintage. Inotherwords,theconstantstateoftechnologicalknowledgeisenoughtofuelgrowthbycapitalinvestmentalone.
Thiskindofgrowthhasbeencalledperpetualgrowth(e.g.,Prettner,2017).Althoughwe(andPrettner)will associate it towhatFreyandOsbornecallmachine learning, it ishardlyanewidea.Solow(1956,p.78)alreadycoinedthepossibilitywhendiscussingtheconstantelasticityof substitution (CES) production function in the context of his growthmodel: under certainparameterconditions,“…thecapital‐laborratio increases indefinitelyandsodoesrealoutputper head. The system is highly productive and saves‐invests enough at full employment toexpandveryrapidly.”
The ideaofperpetualgrowthis,however, justa footnote in thecontributionofSolow(1956).Hismaincontributionwastoshowthatinthepresenceofanon‐reproducibleproductionfactor(i.e., labour) thathassomewhat limitedsubstitutabilitywitha reproducibleproduction factor(capital),growthofpercapitaoutputwouldeventuallyhalt,unlesstheproductivityofthenon‐reproducible factor couldbeaugmented in someway (by technologicalprogress).Themodel

5
thatwaspresentedbySolowdependsheavilyonaso‐calledCobb‐Douglasaggregateproductionfunction,whichexcludesthepossibilityofperpetualgrowth(Solow,1956,p.76).
Intermsofourdiggingexample,givingasingleworkermorethanoneshoveldoesnotleadtohigher quantities of earth moved by that worker (i.e., the marginal returns to capital aredecreasing).With a given demand for digging services, growth of the diggers’ income is notpossiblebyendowingthemwithmoreshovels.Theintroductionofmechanicaldiggers,ontheother hand,would enable fewerworkers to do the job,whichmeans rising productivity andrisingincomefortheworkersthatremain.Butagain,afterallqualifiedoperatorsareprovidedwithonemechanicaldigger,thereisnopointininvestingfurtherinmoremechanicaldiggers.Itis this kind of technological progress (i.e., factor augmenting) that can be accommodated inSolow’sCobb‐Douglasproductionfunction.Ontheotherhand,asillustratedbytheaboveSolowquotation,aCESproductionfunctionopensupawiderrangeofgrowthopportunities.
Solow’sCEScorollarywasnottakenupbytheendogenousgrowthliteraturethatdevelopedinthe1980sand1990s.Instead,thefocuswasonformalconceptualframeworks(models)wheresustainability of growth is strongly dependent on technological change that counteractsdiminishing marginal returns to capital, for example by a succession of labour‐augmentinginventions embodied in intermediate goods (Romer, 1990), or investment in human capital(Lucas, 1988). However, now that we are beginning to realise that cumulative technologicalprogresshasenormously increased thesubstitutabilityof labour (even its cognitive faculties)withcertaintypesofcapital,thereisaneedtodevelopanewformalconceptualframeworktostudygrowth(oftheperpetualtype).
Solow’scorollarypointstotheCES‐basedaggregateproductionfunctionsasawayforwardonthispath.AcemogluandRestrepo(2017,p.10)showthatanaggregateCESproductionfunctionof the type thatwewill be using (i.e.,with labour and “robot capital” as the two productionfactors) may be derived from a micro foundation in which human labour tasks can beautomated, in the sense of Frey and Osborne. Our approach belowwill combine automationwith factor‐augmenting technologicalprogress andhencewill requiredistinguishingbetweentwo basic types of capital: one that embodies each form of technological change that weidentified.
Thesecondissuethatmotivatesourapproachisthatunderastateofperpetualgrowth,labouras a production factorwill potentially receive an ever‐declining share of total income,whichleadstohighinequality.Weareinterestedherebothinthequestionwhetherandhowquicklythis inequalityarises, and inhow it canbe combatted.To investigate the latter issue,wewillbuildintoourmodelanumberofexperimentsthatmimicsocialprotectionpolicies,includingauniversalbasicincome.
What we will not investigate in the model that we present below are the employmentconsequences of factor‐eliminating technological progress. In fact, we will assume that thelabourforceisconstantandwillalwaysbefullyemployed(thisisalsothestandardassumptioninSolow’sgrowthmodel).Wedonotnecessarilybelievethatthisisarealisticassumption,butnevertheless make it because we feel that in the context of perpetual growth, the incomedistributionissueismuchmoresalientthantheemploymentissue.Afterall,perpetualgrowthultimatelymakes employment superfluous, because factor‐eliminating technological progressreducestheroleoflabourintheproductionprocessgreatly.

6
Theoccurrenceofperpetualgrowth inourmodelhingeson threemajor factors: the shareofhumanworkthatcanpotentiallybeautomated,therelativecostsoflabour‐replacingcapitalvs.labour,andtheelasticityofsubstitutionbetweenlabourandlabour‐replacingcapital.Iflabour‐replacingcapital(“robots”)getscheaper,ifmorelabourtaskscanbesubstitutedbyrobots,andifhumanandrobot labourcanbesubstitutedmoreeasily,perpetualgrowth ismore likely tooccur. This is similar to Prettner’s (2017) model of perpetual growth, although he assumesperfectsubstitutabilitybetweenlabourandrobots.Ourresultsshowthatperpetualgrowthmayalready arisewhen substitution is far fromperfect, i.e., at an earlier stage of development ofmachinelearningtechnology.DeCanio(2016)employsaproductionfunctionsimilartoours,inananalysisaimedat identifyingthe impactofrobotisationonwages.Theapproach inPerettoand Seater’s (2013) model is different and does not involve either costs or the elasticity ofsubstitution.
3.Aproductionfunctionforrobotisation
Weformalisetheideasfromtheprevioussectioninthefollowingproductionfunction:
1 1 (1a)
Qisoutput,Lislabourinput(employment),KoandKsaredifferentkindsofcapitalthatwewilldiscuss in detail below, and are parameters related to substitutability in the productionprocess, and, ,bo ,bs andbL are other parameters to be discussed below.We consider ahomogenous labour input, i.e., do not distinguish between different kinds of labour, such ashigh‐skilled and low‐skilled, or blue andwhite collar. The empiricalwork on the automationrisksurveyedabovesuggeststhatlabourofallkindsmaybeautomated,althoughitmayalsobetrue that some kinds of labour have a higher risk than others. We deliberately abstract,however,frommakingsuchadistinction,tokeeptheanalysissimple,andinordertobringouttheresultsoftheanalysisinasharpway.
The reason forassuming twodifferentkindsof capital goods lies in thevarietyofproductiveservices that can jointly produce outputQ. Some of these services can be produced by taskscarriedoutbyhumanlabourL(inacombinationofphysicalandcognitiveactivities).Examplesofthesekindsofservicesarebricklayingorcomposingmusic.Someofthesekindsof“human‐like”activitiescanalsobeperformedbymachines(includingsoftware),butthekeyelementoftheir definition is that all of them can in principle be performed by the human body and/ormind.Thekindofcapitalthatmayreplacethesehuman‐likeactivitieswillbereferredtoasKs.Itiswhatisoftenreferredtoas“robots”,butincludesabroadsetoftechnologiessuchasartificialintelligenceormachinelearning.NotethattheactivitiesthatareproducedbyeitherLorKsarethekindsofactivitiesthatFreyandOsbornearguemaybeautomatedinthe(near)future.
TheproductionfactorsKsandLmayusevaryingamountsofadifferentkindofcapital,whichisdenotedbyKo.Thekeycharacteristicof thiskindof capital is that itproducesservices thatahumanbodyormindcannotdeliver.AsanexampleofcapitaltypeKo,onemaythinkofablastfurnace,anofficebuilding,oralithographymachineusedtoproducesiliconchips.Allofthesetypesofcapitalperformservicesthatahumanbodyorbraincannotprovide.

7
Capital goodsaremeasured inmonetary terms(dollars), and labour in time(suchasperson‐hours). The productivity parameters bo, bs and bL convert these units into output Q. Theproductionfunctionisnested.LabourLandcapitalKsformacompositeproductionfactorinthe“inner part” of the function. This composite production factor follows a logic similar toAcemogluandRestrepo’s(2017)productionfunction.Itconsistsofafixednumberoftasksthatcannotionallybeperformedbyhumanlabouralone.Ashareofthesetaskscanbeautomated,i.e.,canalsobeproducedbycapitaloftypeKsalone.
WeassumethatthereareTsuchtasks,sothatT(0 1)ofthesecanbeperformedbothby humans and robots, i.e., are automatable. The ease of substitution between the (1 – )Thuman‐criticaltasks(non‐automatable)andtheTpotentiallyautomatabletasksisdeterminedby the parameter, which implies the elasticity of substitution to be ≡ 1 1⁄ . Strong
complementarity(low)meansthattheTtasksareequallyneededtoproduceoutput.Inthiscase, evenwhen all of theT tasks are actually automated (whichwill happen if the cost ofproduction with robots are lower than production with humans), the economy will haverobotisedonlyofalltasksand(1–)Ttasksremainproducedbyhumanlabour,whichisthelimittorobotisation.Ontheotherhand,ahighvalueofmeansthattheproductionprocessisabletointensifytheprovisionoftheTsubsetoftaskswhilerelyinglessonthesubset(1–)T,withoutlossofoutput.Inthiscase,theeconomymaybefullyrobotised(i.e.,nohumanlabourusedinproduction)despite<1,byonlyperformingtheTtasksthatareautomatable.
Theabilityoftheeconomytospecialiseinasubsetofalltasks(i.e.,)isclearlydeterminedbyfactorssuchasdemand(i.e.,therelativeeconomicvalueoftherespectivetasks)andopennesstointernationaltrade.Ifsometasksarerelativelymorevaluablethanothers,theeconomycanchoose to increase its productivity by producing more of the relatively more valuable oneswhile decreasing (or terminating) the production of the less valuable tasks and perhapsimporting them. In our model, we will abstract from these demand issues, and also frominternational trade. Instead,wewillmodel the substitutionbetweenhuman labourand robotcapitalKsonlyintermsoftheproductionfunction.
So far, we discussed the role of the parameters and in determining the possibilities ofsubstitution between labour L and robot capital Ks. indicates the degree of potentialautomation, while measures the ease of substitution between automatable and non‐automatable tasks.The thirdand finalparameter thatplaysarole inrobotisation isbs,whichmeasurestheproductivityofKs.Similarly,bLmeasurestheproductivityofhumanlabour.Theseparameters will determine whether or not a potentially automatable task will actually beautomated.Ahigher (lower)bs/bL ratiowillprovide incentives forarelativelyrobot (human)intensiveproduction.
Similartothewaywedefineservicestobeprovidedbyhumansandrobotsastasks,wedefinetotaleconomicoutputasacollectionofproductiveactivities.Theouterleveloftheproductionfunction,withrelevantparametersand,defineshowthetwobroadtypesofactivities(i.e.,human‐like services, and pure capital services) can be combined to produce output. Theparameterαindicatestheshareofactivitiesthatareintensiveinpure‐capitalserviceswhile1–αistheshareofactivitiesthatareintensiveinhuman‐likeservices.

8
The key parameter in the outer part of the production function is , which determines thedegreeofsubstitutionorcomplementaritybetweentheactivitiesintensiveinthecompositeKs–Lfactorontheonehand,andKoontheotherhand.TheparametercanbeseenasspecifyingthelimitationsofaprocessofstructuralchangefromproductiveactivitiesthatareintensiveinKo (suchasmetalmaking,whichrequiresblast furnaces), toaservice‐intensiveeconomythatreliesmuchmoreonactivitiesthatareintensiveinthecompositeKs–Lfactor.Theelasticityofsubstitutioninthisouterpartisdefinedas ≡ 1 1⁄ .
Ouranalysisoftheeconomiceffectsofrobotisationreliesontheassumptionthat0<ρ≤1or>1,whichemphasisesastatewhereautomatable tasksare fairlywellable tosubstitutenon‐automatabletasks,andviceversa.If<0,robotisationbecomesmuchlessofanissue.Wewillalsoassume>,andhence 0and<1.ThismeansthatlabourLcanbesubstitutedmoreeasily with Ks than the composite Ks – L factor can be substituted with Ko. This assumptionessentiallyfollowsfromtheparticularwayinwhichwebreakdownaggregatecapitalintotwocategories (i.e.,Ko as inherentlycomplementary to labour,andKs as inherently substitutable).Theparameterbo(i.e.,theproductivityofKo)playsasimilarroletobsandbL,i.e.,itdeterminesthecost‐effectivenessofKorelativetothecompositeKs–L factor,andhencehasanimpactontherelativeuseofthesetwofactors.
Wedonotanalysetheparametersbo,bs,bL,,andasafunctionoftime.Thisimpliesthatthestateoftechnologyisgiven.RobottechnologyisembodiedincapitalKs,whichcansubstituteforlabour.bsandareareflectionofhowfarrobot‐technologyhasprogressed(productivity‐wise and substitutability‐wise respectively), while ρ is a reflection of the ability of theproductionprocess to (relatively) specialise in robotised subsetof tasks.Theanalysiswill beaimed at finding out how these parameters influence growth, and what this implies for theresultingincomedistribution.
Thisproductionfunctionmaybeusedtorepresentawiderangeofsecularphenomenathatmaybe observed over (recent) economic history. For example, we may interpret the rise of theservices sector as a decrease of (which implies an intensification of activities that needhuman‐like tasks), combinedwith an increase inbL (themodernisationof the services sectorleadingtohigherproductivityofnotyetrobot‐substitutablehumanlabour).FreyandOsborne’sincreased automation riskmeans thatmore andmore tasks (also in the services sector) arebecomingautomatable(βincreasing),andalsothat“robots”arebecomingcheaper(higherbs).
While the latter (increasingβ andbs)may lead toworries of job loss and adeclineof labourincome,acontinuingdecreaseofmayoffsetthistendency.However,theprocessofdecreasing(“servicification”oftheeconomy)maywellhavecomeclosetoanend.Ifthisisthecase,the“newmode” of technological progress (increasing β and bs)maywell have entirely differentconsequencesforemploymentandwagesthanan“oldmode”oftechnologicalprogress,whichmaybe represented by increasingbo andbLwithout a corresponding increase inβ andbs. Inother words, the way in which our production function embodies different forms oftechnologicalchangesuggeststhat“thistimeitmaybedifferent”intermsoftheconsequencesoftechnologicalprogressforlabourmarkets.Thisiswhatwewillinvestigateinthemodelthatwillnowbepresented.
There doesn’t seem to be an emerging sector in the horizon that can achieve what servicessectorachievedinthepast(1‐αcannotincrease).Thismightmeanthatthistimeitisdifferent.

9
4.Asimplegrowthmodel
With the assumed values of the substitution parameters 0 1, (and associated1 ), two special and extreme cases are of interest. One iswhere approaches ∞.
ThisisthecasewherecapitalKoandthecompositefactorKs–Larecompletelycomplementary(=0),sothattheouterformoftheproductionfunctionturnsintothefamiliarLeontiefform,asin
, 1 (1b)
wheretheαparameterdisappears.
Theothercaseiswhenapproacheszero,andtheelasticityofsubstitutionconvergesto1.Inthis case, the outer part of the production function (1a) becomes the familiar Cobb‐Douglasform,asin
1 (1c)
whereAisanarbitrarynewparameterthatwesetto1withoutlossofgenerality.
We use the production function (1a), and in particular (1b) and (1c), in a simple Solow‐likegrowthmodel (Solow,1956)withexogenoussavings,andwithout technologicalprogressandwithoutpopulationgrowth.Afirstassumptioninthismodelisthattheproductionfactorlabourisalwaysfullyemployed:
(2)
InthisequationNisthelabourforce,whichisexogenous.
In order to be able to analyse the income distribution,we distinguish between income fromcapital,andincomefromlabour.ThelatterisearnedsolelybythemembersofthelabourforceN, while income from capital is earned by capital‐owners. For most of the analysis, we willassume that capital owners and workers are separate groups, i.e., nobody is both a capitalownerandaworker.Onlyatthelaststageoftheanalysiswillwerelaxthatassumption.
Relatedtothis,wealsoimplementseparatesavingsratesforlabourincomeandcapitalincome.Thisrequiresustofirstdefinethesetwotypesofincome.Weobtainthe(real)factorpricesofthethreeproductionfactorsbytheirmarginalproducts,andusethesetoobtainsharesof thefactorintotalincome(denotedbywithappropriatesubscripts),whichforthegeneralformoftheproductionfunction(1a)looksasfollows:
≡ 1 1 (3a)
≡ 1 (3b)
≡ (3c)

10
In these equations, we define Θ ≡ 1 1 andΘ ≡ 1 , while pL, pc and ps are the prices of labour, Ks and Ko,respectively.Whentheouter‐partoftheproductionfunctionisCobb‐Douglas(equation1c),thisyieldsashareforcapitalKo,andashare1–forthecompositeKs–Lfactor(sumof3aand3b).WealsodefinethesharesofLandKsinjointincomeofthecompositefactor,as ≡
and ≡ .
Next,weassumethatsavingsoutoflabourincomearezero,whileafractionsKofcapitalincome(bothrobotcapitalandcomplementarycapital)issaved.Thismakestotalsavings(S)equalto
(4)
Allsavingsareinvested.Theinvestmentprocessisdescribedbythefollowingtwoequations:
(5)
, (6)
Equation (5) specifies that all savings are used for investment (I) in capital. Equation (6)specifiesthemotionofbothcapitalstocks,whereweuseadotabovethecapitalstockvariablestodenotetheirchangeovertime(timederivative).Capitalstocksdeclinebyafixeddepreciationrate (which for simplicity we set equal between the two capital types) and increase byinvestment.Inordertodeterminehowinvestmentisdistributedoverthetwotypesofcapital,we assume profit maximisation leading to themarginal products of the two types of capitalbeing equal to each other. The (formal) implications of this assumption will be investigatedbelow.
Finally,weaddalastequationthatdefinesconsumptionbyanationalincomeidentity:
(7)
Wenowproceedtoanalysethemodelintermsofitsimplicationsforgrowthanddistribution.
5.Perpetualgrowth
The basic insight about growth in our model is similar to that of the original Solow‐modelwithouttechnologicalchange(Solow,1956):growthofoutputperworkercanincreaseaslongastheamountofcapitalperworkerkeepsgrowing.Withoutpopulationgrowth(asweassume),thisisthecaseaslongasnetinvestment(I–K)ispositive.
Toderive the conditions underwhich thiswill happen,we start by factoring outKs from theinnerpartoftheproductionfunction(1a),whichgivesriseto
1 1 (8)

11
If the capital stockKs keeps growing, andwith constantN =L, the term goes to zero, and
henceequation(8)willconvergeto
1 ⁄ (9)
Weassumethattheallocationofinvestmentoverthetwotypesofcapitalisprofitmaximising,which implies that the marginal products of the two capital stocks are equal ( ⁄⁄ ).Thesemarginalproductsareobtainedbydifferentiatingthefunction(9)withrespect
toKoandKs.Then,withsomerearranging,theprofitmaximisationconditionyields
⁄
11 (10)
We now focus on the special casewhere capitalKc and the compositeKs –L factor are purecomplements. This implies that approaches ∞, and that = 0. We leave details of thealternativeassumption=1totheappendix.Undertheassumption=0,equation(10)willreduceto
⁄
(10a)
Now we substitute equation (10a) into the production function (9), which after somerearrangingwillyieldarelationbetweenoutputandonlyonetypeofcapital:
⁄ (11)
Netinvestment(I–K)canbewrittenas .Growthrequiresthistobepositive,andusingequations(10a)and(9),wearriveatthegrowthcondition
(12a)
If this condition is satisfied, growth is perpetual, and it arises only from investment in Ks(robots),without improvement in technology (robotorotherwise).Onceaparameter state isreached in which robots are cost‐effective enough ( high enough), are sufficiently able tosubstitute human labour ( and/or large enough), and the savings rate sK is high enough,growthwillbeself‐propellingbyinvestmentinKsalone.Ahigherbo(i.e.,higherproductivityofthenon‐robotcapital)alsocontributespositivelytothelikelihoodofperpetualgrowth.
The appendix shows that if we use the production function (1c), i.e., when the elasticity ofsubstitution=1insteadof0,thegrowthconditionbecomes
⁄ ⁄
(12b)
The growth condition (12a) ismore stringent than (12b), i.e., perpetual growth is harder toachieve when the outer part of the production function allows no substitution (i.e., loweropportunitiesforstructuralchange).Forexample,when ⁄ even=1willnotallowperpetualgrowthinequation(12a)(netinvestmentiszerointhiscase),while(12b)

12
will still allow growth (this holds for awide range of bs and bo values). However, numericalanalysis suggests that these differences are not very large beyond the threshold
⁄ .
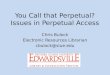
Figure 1 showshow the growth conditiondepends on, andbs. The lines labelled as “CD”refertotheproductionfunction(1c),i.e.,condition(12b)and=1,whilethelineslabelledas“Leon”referto=0(condition12aandproductionfunction1b).hasbeensetto0.05inthisfigure,andbo=1andsK=0.4.Separatecurvesfordifferentvaluesofbshavebeendrawn.When=0,alwaysneedstobe1forthegrowthequationtobesatisfied,irrespectiveofbs(andotherparameters).Forlargervaluesof,thethresholdvalueofbecomeslower,ceterisparibus(andviceversa).Increasingthevalueofbs(i.e.,makingrobotcapitalmoreproductive)willmakethegrowth condition less stringent, for either form of the production function. The figure alsoconfirmstheearlierpointthattheLeontiefouter‐formyieldsamorestringentgrowthconditionthattheCobb‐Douglasform.
Figure1.Thegrowthconditionintermsofand
Equation(11)impliesthatthegrowthrateofoutputinthesteadystate,i.e.,where ⁄ goestozero, andwith = 0, is equal to the growth rate of the capital stockKs.Without populationgrowth(asassumed),thisgrowthrate,whichwillbedenotedbygQ,isalsoequaltothegrowthrateofpercapitaoutput.Thegrowthrateofthecapitalstock–andhenceoutput–isequaltonetinvestmentdividedby(Kc+Ks).Toobtainthis,weuseequations(10a)and(11)towrite:
⁄
⁄ (13a)

13
Intheappendix,weshowthatusingsimilarlogic,thegrowthrateincaseofproductionfunction(1c)and=1isequalto
1 ⁄ (13b)
Theseexpressionsshowthatthesteady‐stategrowthratedependspositivelyonbs,and(the“robotparameters”),aswellasonthesavingsrate.Thedepreciationratehasanegativeimpactonthegrowthrate,whiletheeffectof(incaseof13b)onthegrowthrateisambiguous.
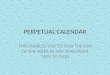
Figure2illustratesthegrowthrateasafunctionof.Thefigureusesbo=1,bs=0.6,=0.5and=0.3.Thesolidlinerepresentsthegrowthratewhen=0(equation13a),thedottedlineisfor = 1 (equation 13b). Growth takes off after the threshold values for consistent withgrowthconditions(12a)and(12b).HighersubstitutabilitybetweenKoandthecompositeKs–Lfactor influences the growth rate positively, as the dotted line is always above the solid line.Plottingthegrowthratewithalternativeparametervaluessuggeststhatthisisafairlygeneralresult,althoughthegrowthratesconvergeforhighvaluesofbsand.
Figure2.Theperpetualgrowthrate
6.Perpetualgrowthandlabourincome
Howdoeslabourincomeevolveinaperpetuallygrowingeconomy,bothintermsofitsshareoftotal income, and in terms of thewage rate? The key element of perpetual growth is capitalaccumulation,bothintermsofKoandKs.Ourquestionisthereforehowthewagerateandtheshare of wages in total income are affected by the growth rates of both capital stocks. AsDeCanio(2016)shows,theanswertothisquestionstronglydependsonthekindofproductionfunctionthatisapplied,andinparticularonthesecondderivativeofoutputwithrespecttotheproduction factors. If the production function contains just two production factors, the price

14
paidforoneproductionfactorwillneverbeinfluencednegativelybytheotherfactor.Inotherwords, if homogenous labour is combinedwith just onekindof capital, thequestionswe areaskingherewouldbeoflittlerelevance.
However,inthekindofnestedproductionfunctionwiththreeproductionfactorsthatweuse,dynamics of factor payments aremore complicated. These production functions support theidea(which,asDeCanio(2016)brieflysummarises,hasbeenaroundatleastsincethesincethedays of Marx and Ricardo) that technological change by accumulation of capital may affectlabour income inanegativeway.To investigate this,wederive the(partial)elasticitiesof thelabourincomeshareandofthewagerate,withrespecttogrowthofthecapitalstock.Wewilldenote these elasticities by (appropriately subscripted), and startwith the elasticity of thelabourincomesharewithrespecttothecapitalstockKo,whichwederiveforthegeneralformoftheproductionfunction(1a):
≡ (14)
Because < 0 and 0, this is strictly positive, which implies that the partial effect ofaccumulation of the capital stockKo on the share of labour income is positive. In this sense,capitalKoistrulylabouraugmenting.
Similarly,wederivetheelasticityofthelabourincomesharewithrespecttothecapitalstockKsas
≡ 1 (15)
With<0,>0andboth incomesharespositive, thisexpression isstrictlynegative, i.e., theaccumulation of the robot capital stockKs will have a negative partial effect on the share oflabour income. Thus, we see an interesting contradiction: capital accumulation of type Koaugmentslabourincome,whileaccumulationofKsaffectsitnegatively.Thisstrongconclusionisa result of the labour‐substituting nature of robot capital, and the labour‐augmenting(complementary)natureofothercapital.
Whichofthesetwoeffectswilldominatedependsonthegrowthratesofbothcapitalstocks,andthe income shares and parameters in equations (14) and (15). In particular stages of thetransienttowardsthesteadystategrowthpath,eitheroneeffectmaydominate,andasaresultthe labour income share may either increase or decrease. For example, if the rate ofaccumulation ofKo is high (low) as compared to that ofKs, wemay expect that the share oflabour incomewill rise (fall).However, in the steady state, the growth rates of both typesofcapitalareequaltoeachother(byequation10),andhencewemayaddupequations(14)and(15)toyieldtheelasticityofthelabourincomesharewithrespecttototalcapitalaccumulation:
≡ 1 (16)
For 1and<0,thismayeitherbepositiveornegative,whilefor=0(whichisthespecialcaseofproductionfunction1c),or 1,theexpressionwillbecomestrictlynegative.Toseethat the latter ( 1) is indeed the case along the steady state growth path, we rewriteequation(3a)as

15
1 1 (17)
Thisshowsthatinthesteadystate,when → 0, willalsoconvergetozero.Consequently,
will converge to one in the steady state, which implies that equation (16) will eventuallybecome negative. Thus, the share of labour income will decline towards zero in the steadystate.2
Does thesamehold for thewagerate(whichwewilldenoteas ⁄ )?Toanswerthisquestion,wederivesimilarelasticitiesasbefore,thistimeforthewageratewithrespecttobothcapitalstocks.Wedenotetheseelasticitiesby ,andfindthemtobeequalto
≡ 1 1 (18)
≡ 1 1 1 (19)
≡ 1 1 1 (20)
Equation(18)isstrictlypositive,i.e.,thepartialeffectofcapitalaccumulationoftypeKoonthewagerateispositive,eitherinthesteadystateorinatransienttowardsit.Hencetheanalysisfor the wage rate confirms the conclusion of the labour‐augmenting nature of Ko that wearrivedatintheanalysisforthelabourincomeshare(equation14).
Equation(19)mayeitherbepositiveornegative,dependingonparametervaluesandincomeshares. For the special case = 0 (production function 1c),we have , and the sign ofequation (19) depends on the sign of (1 – – ): if > 1 – , the partial effect of capitalaccumulationoftypeKsonthewageratewillbenegative,otherwiseitwillbepositive.
Equation(20),whichholdsonlyinthesteadystatewhentheratesofaccumulationofbothtypesofcapitalareequal,isstrictlypositive(itcanbeshownthatthethresholdvaluefor tomakethisequationnegativeliesabove1,whichisruledout).Henceinthesteadystate,thewageratewill rise,although theshareofwages in incomewilldecline.Theconclusion is thatperpetualgrowth by robots makes labour better off in absolute terms (the wage rate), but in relativeterms(incomedistribution),workersclearlyarevictimsofrobots.
7.Distributionalpolicies
The remainder of the paperwill be devoted to a discussion of two possibleways of fightinginequality thatresults fromgrowthbyrobots.The first isasocialprotectionpolicy that taxesincomefromcapitalownershipandre‐distributestherevenueofthistaxtowageearners.Weimplementthisbyafixedtaxrateraisedeveryperiod.Thesecondoptionintroducessavings
2Usingaproductionfunctionverysimilartoours,DeCanio(2016)estimatestheelasticityofsubstitutionbetweenrobotsandhumanlabouratwhichthelaboursharebeginstodecline.Hisestimationspointtoavalueofthesubstitutionparameter(inourcase)between0.4and0.5.

16
out of wage income, thus enabling wage earners to invest in capital (of both types) andcomplementtheirwagesbycapitalincome.
In order to undertake this analysis, we numerically simulate the model rather than provideanalyticalsolutions.Weuseproductionfunction(1c) inthesesimulations, i.e., theelasticityofsubstitution=1.Weusediscretetime,i.e.,foreveryperiodinthesimulation,we(i)calculateoutputusingtheexistingcapitalstocksandavailablelabour,(ii)calculatetheincomesharesandassociated savings, (iii) numerically solve the investment allocation problem and assign totalsavings to the twodifferentkindsof investment, (iv)update the capital stocks, and return tostep(i)foranewperiod.WesetinitialvaluesofKoandKsto100and0.1respectively,andN=100throughoutallsimulations.Parametervaluesare=0.3,=0.05,sK=0.4,bo=bs=bL=1,=0.4, =0.7.Theseparametervaluesensureperpetualgrowth (without taxes).We simulate400periodsandassurethatconvergenceinthegrowthratesisachievedatthatpoint.
We start the discussion with the tax option, which can be seen as the implementation of auniversalbasic income(VanParijsandVanderborght,2017).Theobviousdrawbackof this isthat taxeswill hurt capital accumulation by reducing the funds available for investment, andtherebylowerstheperpetualgrowthrate.Figure3showstheresult.Withoutanytaxesandre‐distribution,we observe a growth rate of about 3.7%, and a share of labour income in totalincome that is very close to zero.When the tax rate rises, the growth rate declines, until itbecomesveryclosetozeroat=0.5.
Theimpactofthere‐distributedtaxontheshareofincomeisaboutequaltothetaxrateitself,becauseitisineffectalmostataxontotalincome(wageincomeisverysmallwhensubstantialgrowthoccurs).Thus,inordertoreachalabourincomeshareofabout0.4–0.6,,weneedataxrateofabout40%.Butthisessentiallymakesgrowthgoaway.
Figure3.Theeffectsofincomere‐distributionbasedonacapitalincometax

17
Next,we lookatacasewhereworkerssaveand invest incapital, followingFreeman’s(2014)ideathatworkers“canruletheworld”byowningrobots.Tothisend,wemodifyequation(4)asfollows(notethatwealsosubstituteincomesharesthatapplytothecaseofproductionfunction1c):
1 1 (4a)
wheresLisanewparameterthatrepresentsthesavingsrateoutoflabourincome.NotethatforsL=0andproductionfunction(1c),equation(4a)reducestoequation(4),i.e.,themodelisasbefore.Notealsothatequation(4a)assumesthatsavingsratesarespecifictoincomecategory,i.e.,whenaworkerhasbothlabourincomeandcapitalincome,thatworkerappliestwodistinctsavingsrates(sLandsK).Allsavingsareinvested.Wekeeptrackofwhichpartofthetwocapitalstocksisownedbyworkers,andwhichpartbycapitalowners.Theownershipofcapitaldoesnotimpactthegrowthrateinanyway,butsL>0doesimplythatthetotalamountofsavingsislarger,andhencethegrowthrateisalsolarger.Butthisisasmalleffect,becausesavingsoutofwagesisasmallamount,becausewagesasashareofincome(thesourceofextrasavings)arenearzerowhengrowthissubstantial.
Figure4.Distributionalandgrowtheffectsoflabourincomesaving
Figure4presentstheresultsoftheexperiment,usingvaluesforsLfrom0to0.6.Weset=0.5forthisanalysis,andallotherparametersasbefore.Growthincreaseswiththesavingsrate,butthiseffectisverysmallasindicatedbythescaleoftheverticalaxisontheright,whichcoversadifference of only 0.00025. The effects on distribution are much more substantial. Whereworkers’ income consists ofwages only,without saving, it is near to zero as a share of totalincome,asexpected.Withpositivesavingsoutoflabourincome,thisincreasesrapidlyforsmallsavingsratessL,toabout65%whensL=0.1,andwellabove95%forsL=0.6.Wagesasashareof

18
totalworkers’incomedeclinerapidlyforpositivevaluesofsL,andarenegligiblealreadyforsL=0.1.
Concluding from the twoexperiments aimedat realising a reduction inequality, it seems thattaxing and re‐distributing is much less effective than workers’ savings and investment.Perpetualgrowthbyrobotscausesinequalitybetweenworkersandcapitalowners,andthekeytoreducingthisinequalitylaysintransformingworkerstocapitalowners.Inthismodel,robotspracticallymakehumanlabourgoaway,butprovideasourceofrichesfortheirowners.
8.SummaryandConclusions
Ouranalysis,inparticulartheproductionfunctionthatweuse,startsfromtheassumptionthattechnological progress in the form of machine learning and artificial intelligence is of afundamentallynewnature.Thisformoftechnologicaldevelopmentproducesaformofcapitalthatsubstitutesforhumanlabourratherthanaugmentsit.Ourmodelisaimedatinvestigatingthe consequences of this for labourmarkets, in particularwages and thewage share of totalincome(ourmodelassumesfullemploymentandhencehaslittletosayabouttheemploymentconsequencesoftechnologicalchange).
Ouranalysis illustratesthat labour‐substitutingtechnologicalprogresscangenerateperpetualgrowth, i.e., sustainedgrowthofper capitaoutputwitha given stateof technology.Basedonempiricalworkby,amongothers,FreyandOsborne(2017),Arntzetal.(2017)andNedelkoskaandQuintini(2018),wearguethattechnologiessuchasmachinelearning,mobileroboticsandartificial intelligence (in short, “robots”) may soon be able to provide this kind of labour‐substituting technology.Ouranalysis suggests threemain factors indeterminingwhether therobot‐technology will generate perpetual growth: the extent to which the technology canautomate human labour tasks, how cheap the technology canbe implemented, andhowwellautomated tasks can substitute tasks performed by humans in the aggregate productionprocess.
Ourmodelwasabletoderiveconditionsforperpetualgrowthtooccur,andexpressionsfortheperpetual growth rate. Perpetual growth ismore likely to occur, and the growth ratewill behigher,whenrobottechnologyismoreadvanced.Inparticular,weshowthatrobot‐technologydoes not have to offer complete or even near‐complete substitutability for human labour inordertogenerateperpetualgrowth.
In a futurewhere robots generate perpetual growth, income fromhuman labourwill fetch anegligiblepartoftotalincomeintheeconomy,eventhoughtheabsolutewageratewillriseasaresult of robot‐based perpetual growth. This means that perpetual growth makes workersbetteroff inanabsoluteway,butworseoff inarelativeway.This implies thatwithoutsocialprotectionpolicy,incomeinequalitymayrisetounprecedentedlevelsinafutureeconomy.Weimplementedsomesimulationexperimentsinwhichtwopotentialkindsofsocialprotectionareconsidered.
Inoneexperiment,incomefromrobotswastaxedandtransferredtothosewhoarelivingonlyon awage income. This can be seen as the implementation of a universal basic income, in abudget‐neutralway.Thedrawbackofthetaxisthatitreducesfundsavailableforinvestmentin

19
capital,whichisthesourceofperpetualgrowth.Weassumedthatthetaxdoesnotinfluencethesavingsrate (i.e., that it ispaidproportionallyoutofconsumptionand investment).Themainfindingwasthatinordertoreduceinequalityinasubstantialway,i.e.,tokeeptheincomeshareofwageowners(includingthetaxtransferoruniversalbasicincome)atalevelcomparabletoapre‐perpetualgrowthstateoftheeconomy,growthwillbereducedsubstantially.Thissuggeststhat itmaybedifficult to fight inequalitybyauniversalbasic income ifgrowthbecomesverymuchdependentonrobot‐technology.
The other policy option that was considered was workers’ savings, i.e., saving out of labourincome.Inthisway,workersbecomealsocapitalowners(andweassumethattheirsavingsrateoncapitalincomeisequaltothatof“pure”capitalincomeearners).Thisgeneratesextrasavingsand investment rather than reduce it, and hence is growth‐enhancing. The growth effect issmall, however, because labour income remains small and hence does not generate muchsavings.However, “workers” are able to accumulate a capital stock,whichbecomes themainsource of their income. Even a relatively modest savings rate for labour income (e.g., 10%)reducesinequalityverysignificantly.
Althoughthissavingsexperimentcouldbeseenasavoluntaryarrangement,notdependentonpolicy,itmayalsobeimplementedasaforcedsavingsscheme,comparabletopensionschemesinmany(European)countries.Assuch,itcanbeseenasaformofsocialprotectionpolicy,andonethatseemsrelativelyeffective(moresothantheuniversalbasicincome).Withthiskindofpolicy, the view in Albus (1976) about a robot‐society as a “peoples’ capitalism”may indeedbecometrue.
Thereareseveralopenresourceavenuesthatmustbefollowedforthetheoryinthispapertobecome better founded and better able to think about a future economy in which robot‐technology becomes dominant. For example, our growthmodel is relatively crude. It reflectsSolow’s model from the 1950s, and ignores advances made in growth theory since then. Itremains to be shown whether endogenisation of important factors such as savings andinvestmentintechnology(whichweignoredcompletely)changeanyofthemajorconclusionsaboutperpetualgrowthortheincomedistribution.
Also,workremainstobedoneaboutsocialprotectionpolicy.Duetothecrudenessofourmodel,wewerenotabletoanalysedetailedformofsuchpolicies,orlookatthevariouswaysinwhichthese policies could be instituted. The analysis does suggest, however, some directions forresearchonthistopic,suchastherelationshipbetweenauniversalbasicincomeandaggregatesavings and investment. Relatively little seems to be known about this relationship, but ourresultssuggestthatitmaybecrucialforhowwellsuchaschemecouldwork.
In summary, our analysis points to the possibility that robot‐technology will be a trulyrevolutionisingforce,andcallsformoreresearchontheimplicationsandpolicyprocessesthatwillbenecessarytomakeitasoftrevolution.

20
References
Acemoglu, D. and P. Restrepo, 2017, The Race Between Machine and Man: Implications ofTechnologyforGrowth,FactorSharesfndEmployment,NBERWorkingPaper22252,NationalBureauofEconomicResearch
Albus,J.S.,1976,Peoples’Capitalism:theEconomicsoftheRobotRevolution,NewWorldBooks.
Arntz, M., Gregory, T. and U. Zierahn (2016), “The Risk of Automation for Jobs in OECDCountries:AComparativeAnalysis”,OECDSocial,EmploymentandMigrationWorkingPapers,No.189,OECDPublishing,Paris
Autor,D.,Levy,F.andR.J.Murnane,2003,Theskillcontentofrecenttechnologicalchange:anempiricalexploration,QuarterlyJournalofEconomics,vol.118,pp.1279–1333.
Autor,D.,2015,WhyAreThereStillSoManyJobs?, JournalofEconomicPerspectives,vol.29,pp.3–30
Bessen, J.,2016,HowComputerAutomationAffectsOccupations:Technology, Jobs,andSkills,BostonUniversitySchoolofLaw,Law&EconomicsWorkingPaperNo.15‐49
Chui,M.,Manyika,J.andM.Miremadi,2016,Wheremachinescouldreplacehumans–andtheycan’t(yet),McKinseyQuarterly,July.
DeCanio, S.J., 2016, Robots and humans –complements or substitutes?, Journal ofMacroeconomics,vol.49,pp.280–291
Freeman,C.andL.Soete,1994,WorkforAllorMassUnemployment,London:Pinter,1994
Freeman,R.B.(2014),“Whoownstherobotsrulestheworld”,IZAWorldofLabor2014:5
Frey, C.B. and M.A. Osborne, 2017, The future of employment: How susceptible are jobs tocomputerisation?,TechnologicalForecastingandSocialChange,vol.114,pp.254–280.
Katsoulacos,Y.,1986,TheEmploymentEffectofTechnicalChange.A theoreticalstudyofnewtechnologyandthelabourmarket,Brighton,Wheatsheaf
Lucas,R., 1988,On themechanics of economicdevelopment, Journal ofMonetaryEconomics,vol.22,pp.3‐42
Nedelkoska, L. and G. Quintini, 2018, Automation, skills use and training, OECD Social,EmploymentandMigrationWorkingPapers,14March,OECDPublishing,Paris.
Nelson, R.R. and S.G. Winter. (1982), An Evolutionary Theory of Economic Change, HarvardUniversityPress.
Peretto, P.F. and J.J. Seater, 2013, Factor‐eliminating technical change, Journal of MonetaryEconomics,vol.60,pp.459–473
Pratt, G.A., 2015, Is a Cambrian Explosion Coming for Robotics?, Journal of EconomicPerspectives,vol.29,pp.51–60

21
Prettner, K., 2017, A Note on the Implications of Automation for Economic Growth and theLaborShare,MacroeconomicDynamics,advancecopy.
Romer,P.,1990,EndogenousTechnologicalChange,JournalofPoliticalEconomy,1990,vol.98,pp.S71‐102
Silverberg, G. and B. Verspagen, 1994, Collective Learning, Innovation and Growth in aBoundedlyRational,EvolutionaryWorld,JournalofEvolutionaryEconomics,vol4,207‐226.
Solow,R.M.,1956,AContributiontotheTheoryofEconomicGrowth,TheQuarterlyJournalofEconomics,vol.70,pp.65–94
VanParijs,Ph.andY.Vanderborght,2017,BasicIncome.ARadicalProposalforaFreeSocietyandaSaneEconomy,HarvardUniversityPress.
Vivarelli, M., 1995, The Economics of Technology and Employment: Theory and EmpiricalEvidence,Aldershot:Elgar.

22
Appendix–Additionalderivations
Wepresentheresomeadditionalderivationsonthegrowthpropertiesofthemodelwhenweuse production function (1b), i.e., where the outer part of the production function is Cobb‐Douglas.Westartwiththeconditionforperpetualgrowth,which,asinthemaintext,isbasedonnetinvestment(I–K)beingpositive.Asinthemaintext,westartbyfactoringoutKsfromtheCESpartoftheproductionfunction(1b),yielding
1 (A1)
Withtheterm goingtozero,equation(A1)willconvergeto
(A2)
Profit maximising investment implies ⁄ ⁄ , which, based on the production
function(1b)andkeepinginmind → 0,yields
(A3)
Substituting(A3)in(A2),weobtain
⁄ (A4)
Usingequations(A3)and(A4),thegrowthconditionbecomes
(A5)
Thegrowthrateof thecapitalstockKs,whichbyequation(A4) isequal to thegrowthrateofoutput, isequaltonet investmentdividedbythecapitalstockitself.Usingalsoequation(A3),weobtain
1 ⁄ (A6)

The UNU‐MERIT WORKING Paper Series 2018-01 The serendipity theorem for an endogenous open economy growth model by
Thomas Ziesemer 2018-02 Instability constraints and development traps: An empirical analysis of growth
cycles and economic volatility in Latin America by Danilo Sartorello Spinola 2018-03 Natural, effective and BOP‐constrained rates of growth: Adjustment mechanisms
and closure equations by Gabriel Porcile and Danilo Sartorello Spinola 2018-04 The relevance of local structures for economic multiplier effects of social pensions
in Uganda by Maria Klara Kuss, Franziska Gassmann and Firminus Mugumya 2018-05 Regulating the digital economy: Are we moving towards a 'win‐win' or a 'lose‐
lose'? by Padmashree Gehl Sampath 2018-06 The economic impacts of a social pension on recipient households with unequal
access to markets in Uganda by Maria Klara Kuss, Patrick Llewellin and Franziska Gassmann
2018-07 The effect of weather index insurance on social capital: Experimental evidence from Ethiopia by Halefom Y. Nigus, Eleonora Nillesen and Pierre Mohnen
2018-08 Evaluating intergenerational persistence of economic preferences: A large scale experiment with families in Bangladesh by Shyamal Chowdhury, Matthias Sutter and Klaus F. Zimmermann
2018-09 Agricultural extension and input subsidies to reduce food insecurity. Evidence from a field experiment in the Congo by Koen Leuveld, Eleonora Nillesen, Janneke Pieters, Martha Ross, Maarten Voors and Elise Wang Sonne
2018-10 Market integration and pro‐social behaviour in rural Liberia by Stephan Dietrich Gonne Beekman, and Eleonora Nillesen
2018-11 Sanctioning Regimes and Chief Quality: Evidence from Liberia by Gonne Beekman, Eleonora Nillesen and Maarten Voors
2018-12 Chinese development assistance and household welfare in sub‐Saharan Africa by Bruno Martorano, Laura Metzger, Marco Sanfilippo
2018-13 Foreign direct investment in sub‐Saharan Africa: Beyond its growth effect by Hassen Abda Wako
2018-14 Fluctuations in renewable electricity supply: Gains from international trade through infrastructure? by Thomas Ziesemer
2018-15 What is the potential of natural resource based industrialisation in Latin America? An Input‐Output analysis of the extractive sectors by Beatriz Calzada Olvera and Neil Foster‐McGregor
2018-16 Global Value Chains and Upgrading: What, When and How? by Padmashree Gehl Sampath and Bertha Vallejo
2018-17 Institutional factors and people's preferences in the implementation of social protection: the case of Ethiopia by Vincenzo Vinci and Keetie Roelen
2018-18 Towards a European full employment policy by Jo Ritzen and Klaus F. Zimmermann 2018-19 Drivers of growth in Tunisia: Young firms vs incumbents by Hassan Arouri, Adel
Ben Youssef, Francesco Quatraro and Marco Vivarelli 2018-20 Africa Sector Database (ASD): Expansion and update Emmanuel Buadi Mensah
and Adam Szirmai 2018-21 Combatting corruption in higher education in Ukraine by Anna Vasylyeva and
Ortrun Merkle

2018-22 What more can we learn from R&D alliances? A review and research agenda by Andrea Martinez‐Noya and Rajneesh Narula
2018-23 Perpetual growth, distribution, and robots Önder Nomaler and Bart Verspagen