Embed Size (px)
Citation preview
Periodic Motion Detection via Approximate Sequence Alignment
Ivan Laptev*, Serge Belongie**, Patrick Perez*
*IRISA/INRIA, Rennes, France
**Univ. of California, San Diego, USA
May 9-10, 2005
Motivation
Dominant motion estimation Works very well for a panning camera and static backgrounds Problems for scenes with motion parallax and multiple motions
Motivation
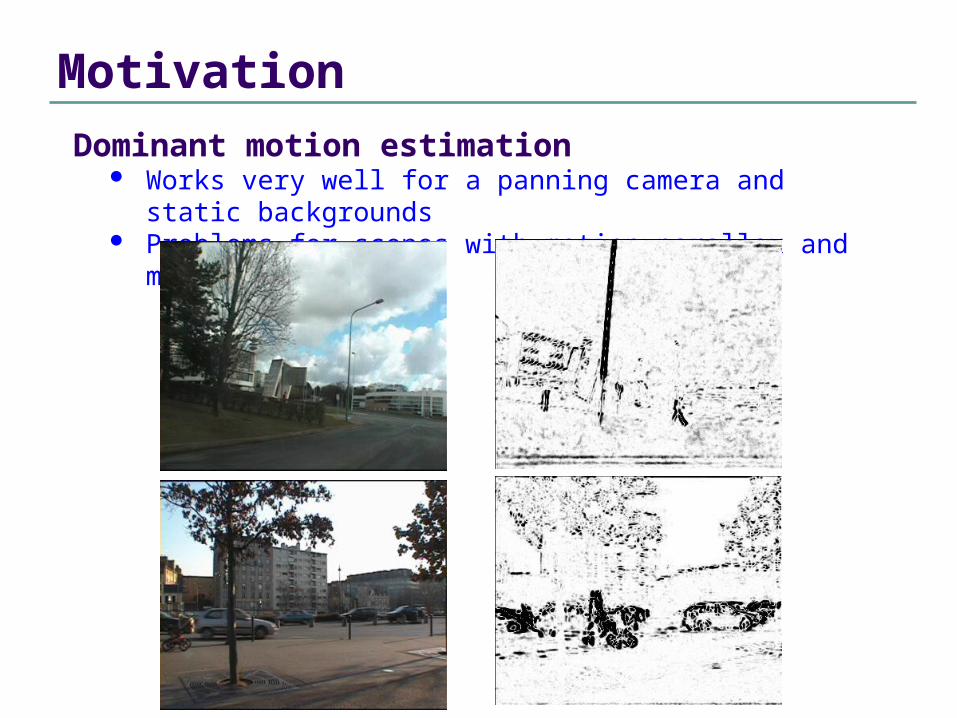
Dominant motion estimation Works very well for a panning camera and static backgrounds Problems for scenes with motion parallax and multiple motions
Motivation
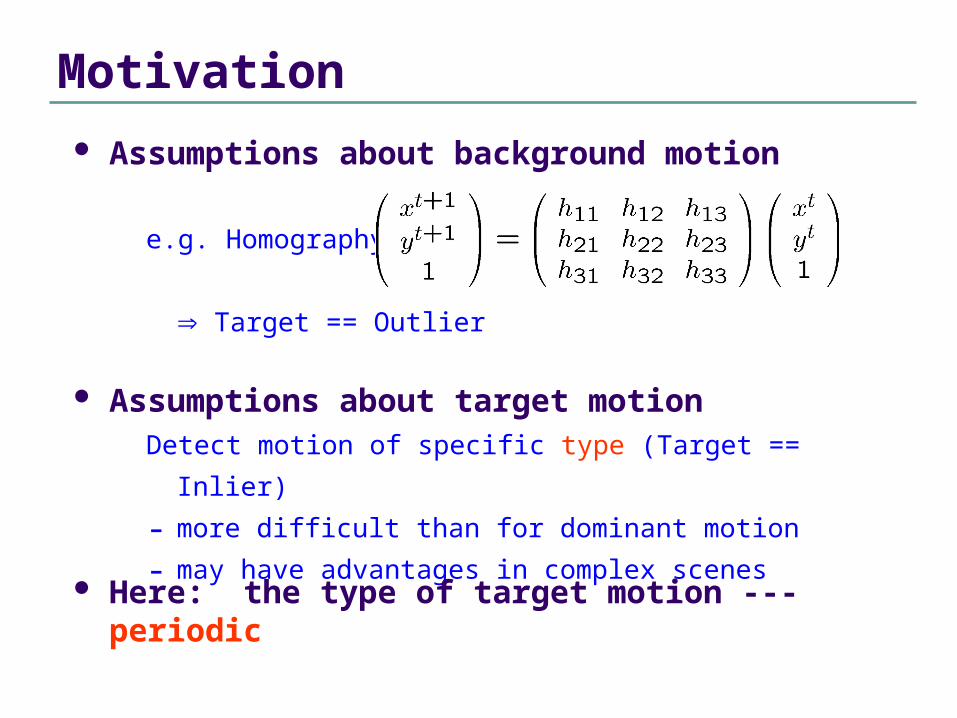
Assumptions about background motion
e.g. Homography:
Target == Outlier
Assumptions about target motionDetect motion of specific type (Target == Inlier)
- more difficult than for dominant motion
- may have advantages in complex scenes
Here: the type of target motion --- periodic
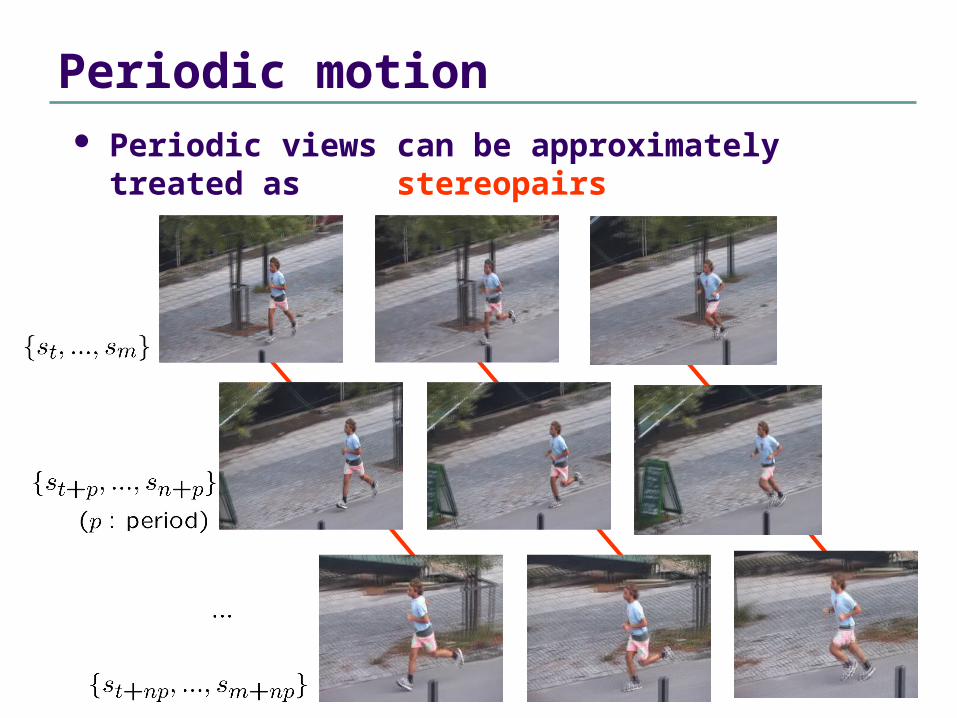
Periodic motion Periodic views can be approximately treated as
stereopairs
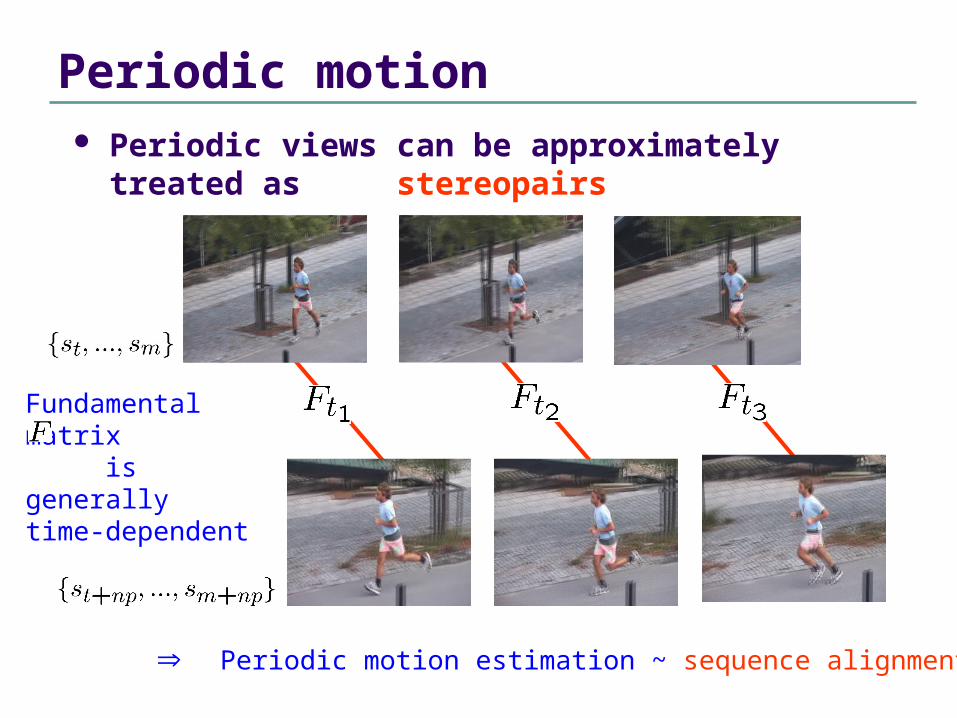
Periodic motion Periodic views can be approximately treated as
stereopairs
Fundamental matrix is generally time-dependent
Periodic motion estimation ~ sequence alignment
Sequence alignment
Generally hard problem Unknown positions and motions of cameras Unknown temporal offset Possible time warping
Prior work treats special cases Caspi and Irani “Spatio-temporal alignment of sequences”,
PAMI 2002 Rao et.al. “View-invariant alignment and matching of video
sequences”, ICCV 2003 Tuytelaars and Van Gool “Synchronizing video sequences”,
CVPR 2004
Useful in Reconstruction of dynamic scenes Recognition of dynamic scenes
Assumptions
Constant translation Assume the camera is translating with velocity relatively to
the object
For sequences
corresponding points are related by
All corresponding periodic points are on the same epipolar line
Points with non-constant motion
Rejects trivial case of pure translation Can be detected by maximizing local variation of space-time
gradients (Laptev and Lindeberg, IJCV 2005)
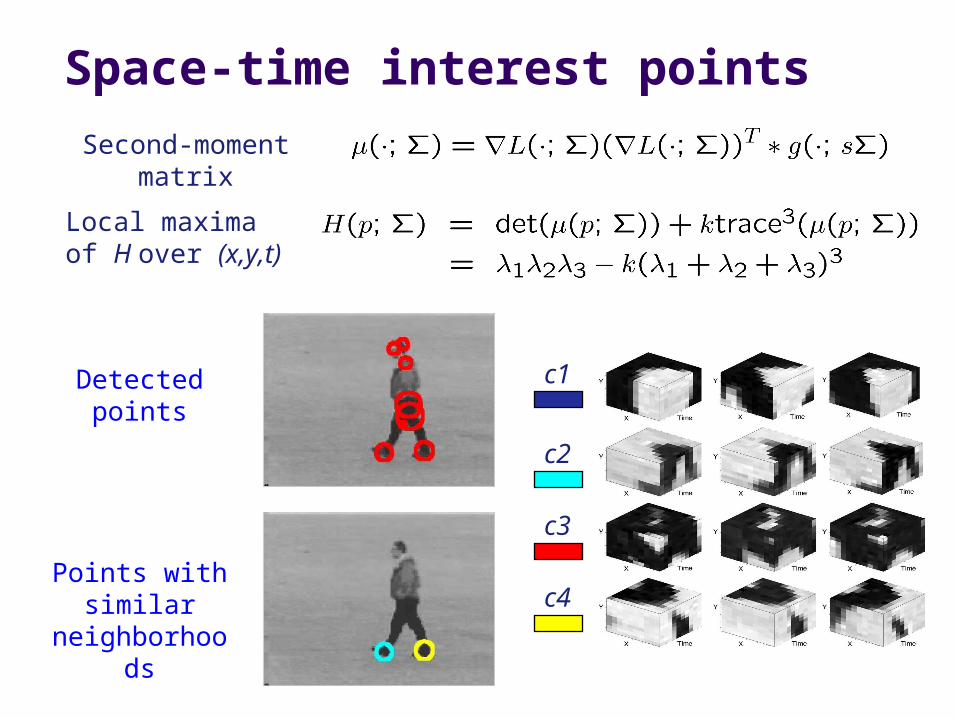
Space-time interest points
c1
c2
c3
c4
Second-momentmatrix
Local maxima of H over (x,y,t)
Detected points
Points with similar
neighborhoods
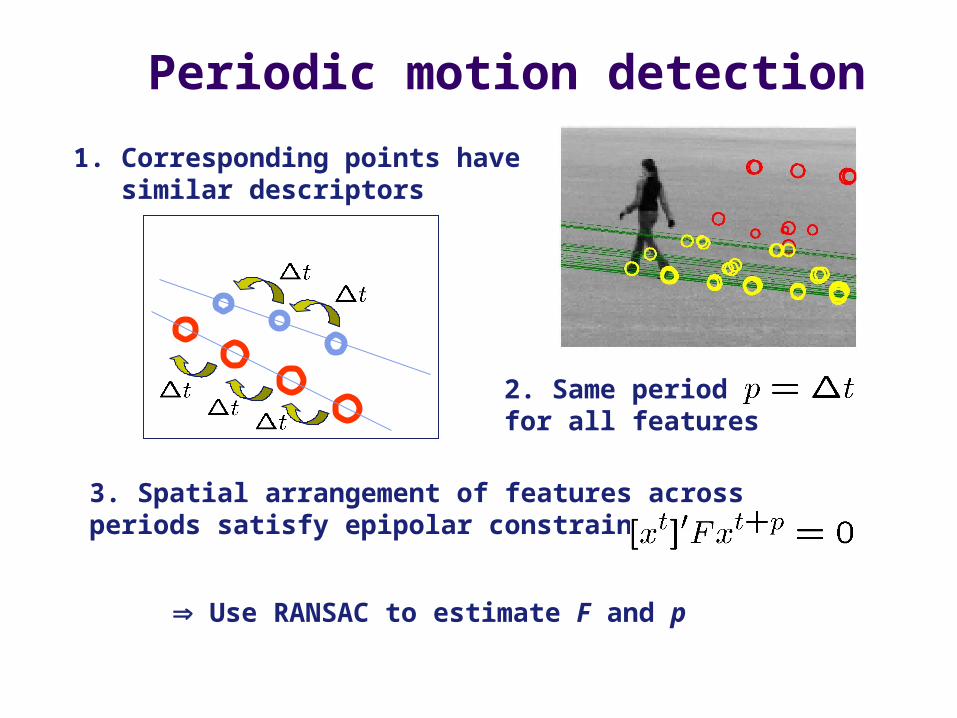
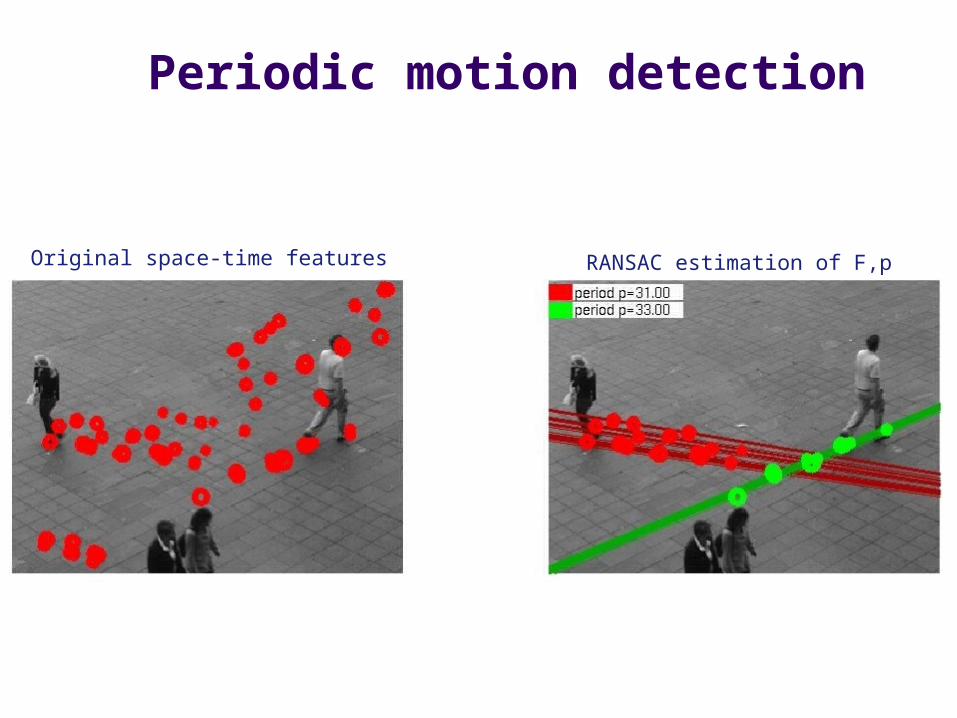
Periodic motion detection
1. Corresponding points have similar descriptors
2. Same period for all features
3. Spatial arrangement of features across periods satisfy epipolar constraint:
Use RANSAC to estimate F and p
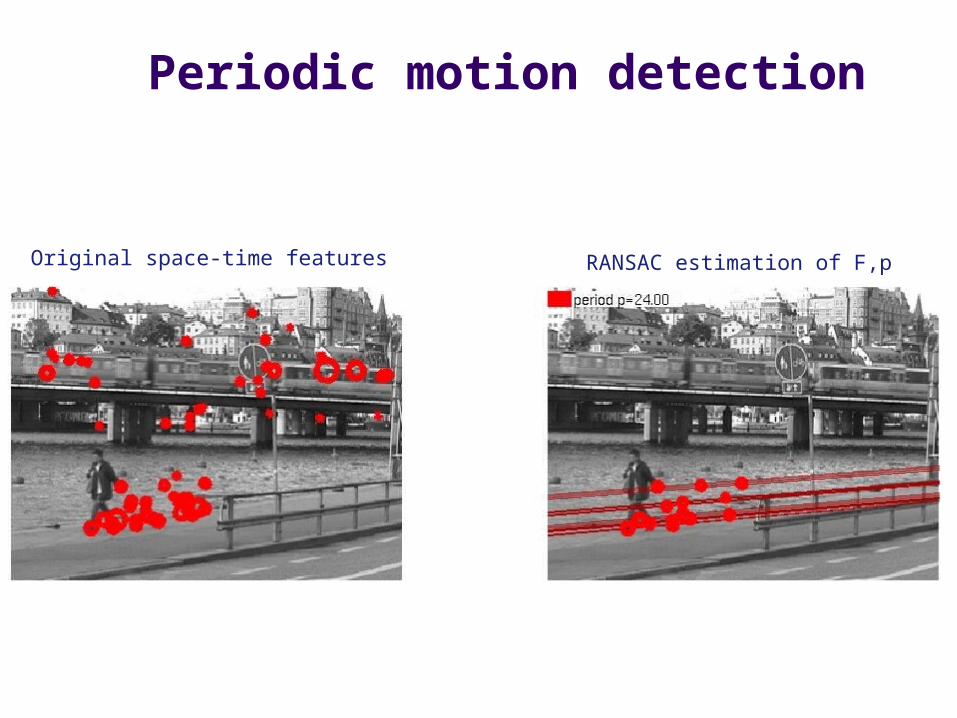
Periodic motion detection
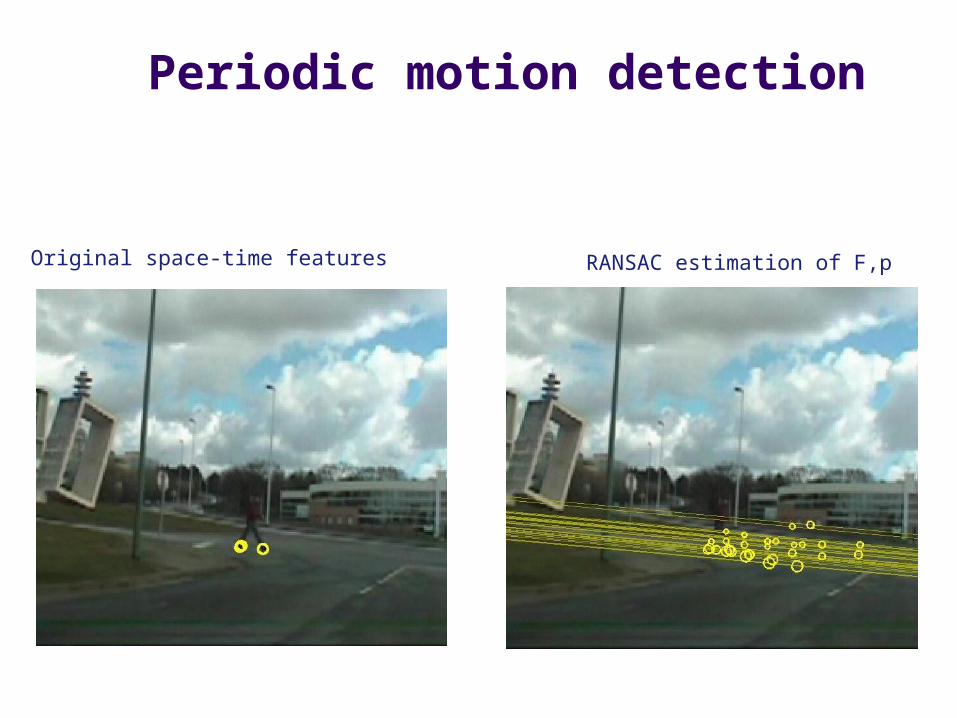
Original space-time features RANSAC estimation of F,p
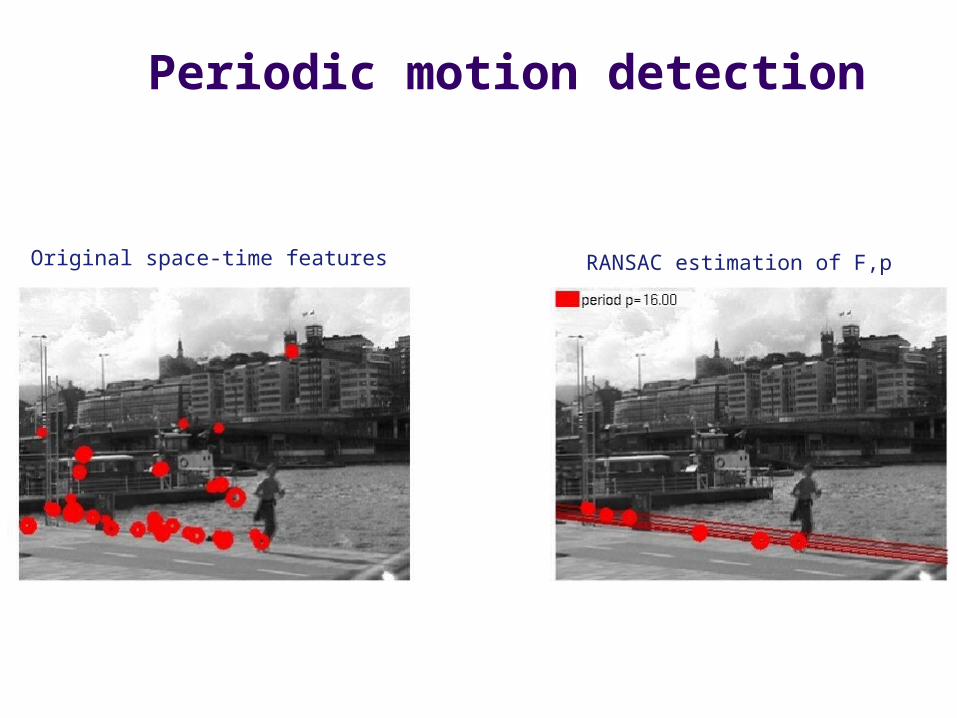
Periodic motion detection
Original space-time features RANSAC estimation of F,p
Periodic motion detection
Original space-time features RANSAC estimation of F,p
Periodic motion detection
Original space-time features RANSAC estimation of F,p
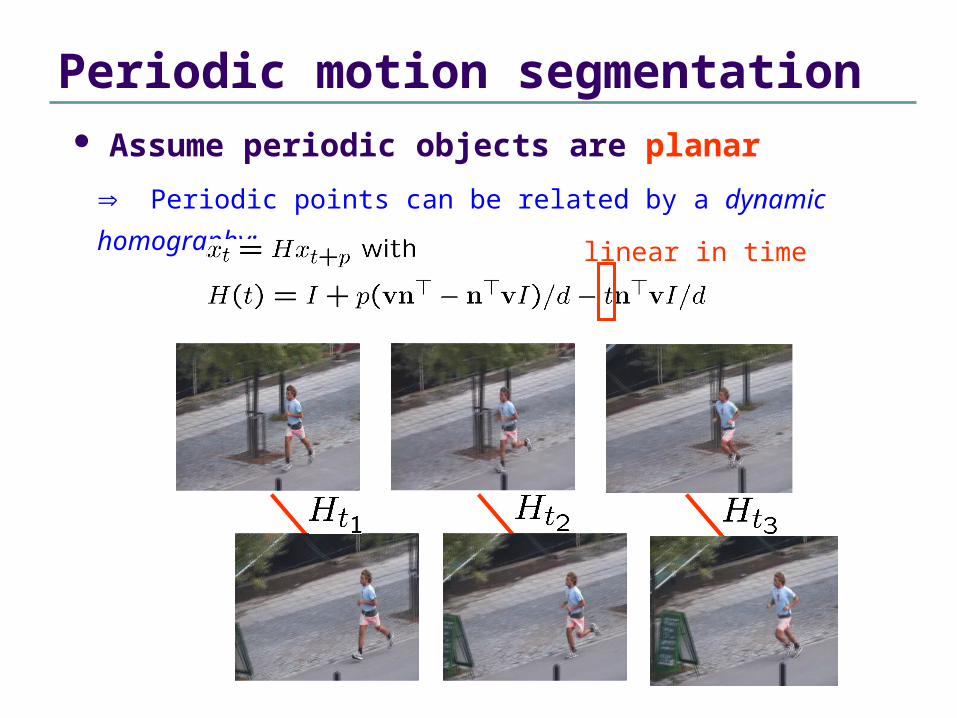
Periodic motion segmentation Assume periodic objects are planar
Periodic points can be related by a dynamic homography:
linear in time
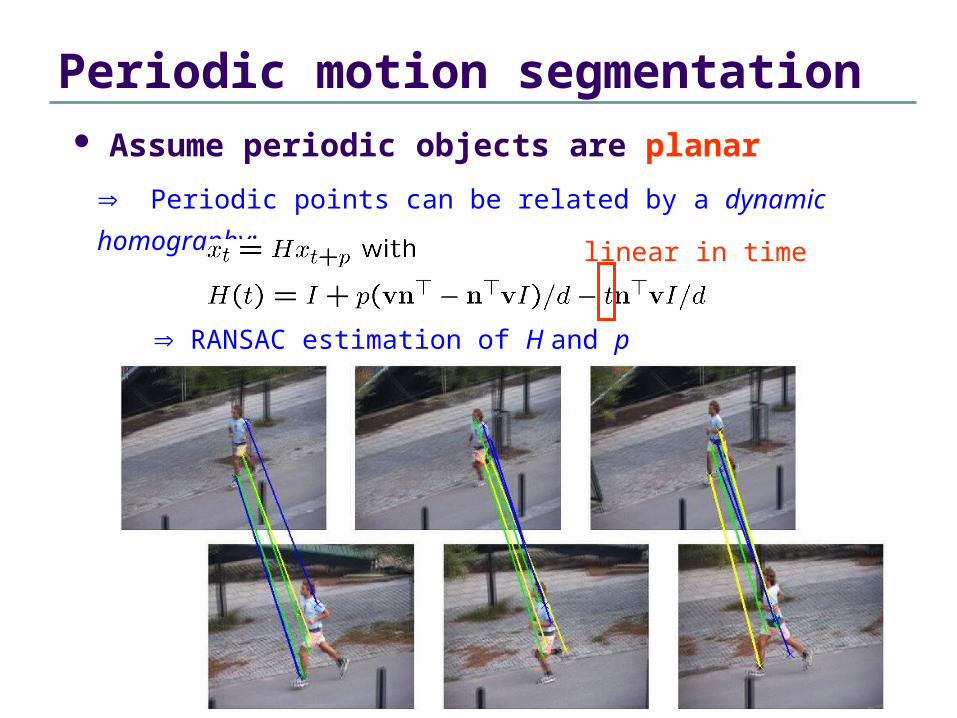
Periodic motion segmentation Assume periodic objects are planar
Periodic points can be related by a dynamic homography:
RANSAC estimation of H and p
linear in time
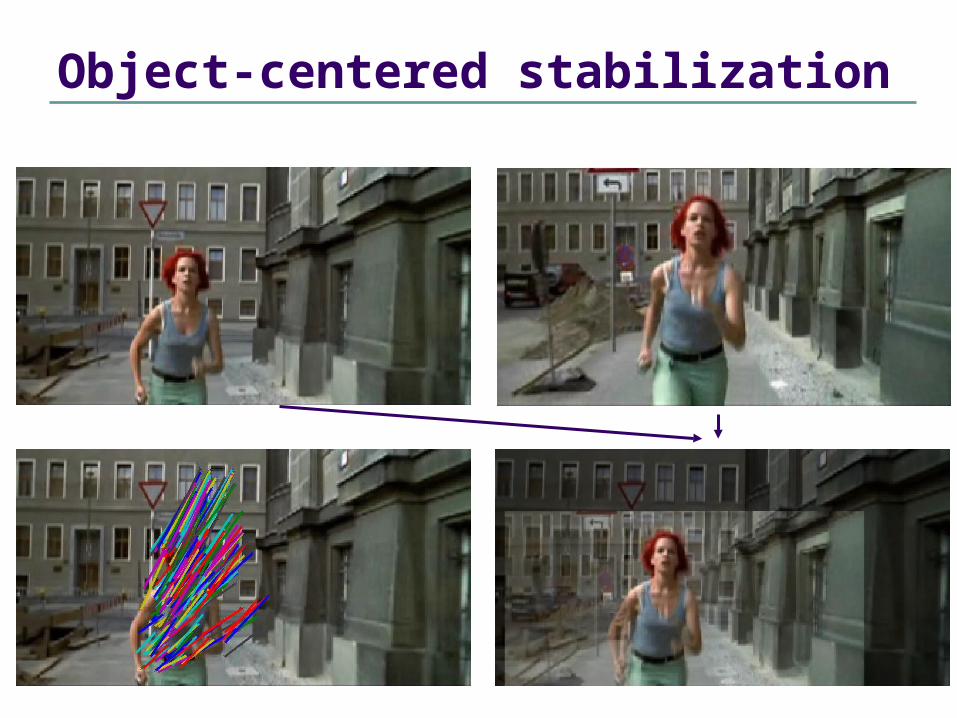
Object-centered stabilization
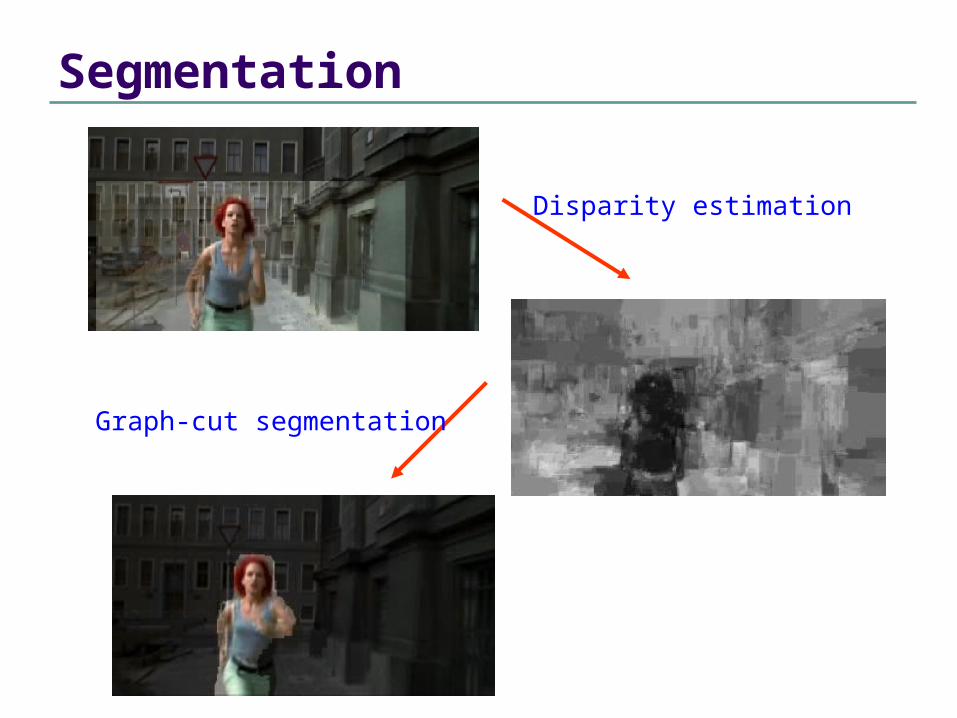
Segmentation
Disparity estimation
Graph-cut segmentation

Segmentation

Segmentation
Conclusion
Direct method for periodic motion detection and segmentation
Constant translation assumption might be relaxed by tracking the modeling H and F as non-linear matrix functions
Extension to non-periodic motion recognition via sequence alignment using corresponding space-time points

Segmentation





























