-
Perceptual-Motor Contributions to Static and Dynamic Balance
Control in ChildrenV. HatzitakiV. ZisiI. KolliasE.
KioumourtzoglouDepartment of Physical Education and Sports
SciencesAristotelio University of ThessalonikiGreece
ABSTRACT. The authors addressed balance control in childrenfrom
the perspective of skill development and examined the rela-tionship
between specific perceptual and motor skills and staticand dynamic
balance performance. Fifty 11- to 13-year-old chil-dren performed a
series of 1-legged balance tasks while standingon a force platform.
Postural control was reflected in the maxi-mum displacement of the
center of mass in anteriorposterior andmediolateral directions.
Simple visual, discrimination, and choicereaction times; sustained
attention; visuomotor coordination;kinesthesis; and depth
perception were also assessed in a series ofperceptual and motor
tests. The correlation analysis revealed thatbalancing under static
conditions was strongly associated with theability to perceive and
process visual information, which is impor-tant for feedback-based
control of balance. On the other hand,when greater task demands
were imposed on the system underdynamic balancing conditions, the
ability to respond to the desta-bilizing hip abductionsadductions
in order to maintain equilibri-um was associated with motor
response speed, suggesting the useof a descending, feedforward
control strategy. Therefore, likeadults, 11- to 13-year-old
children have the ability to select vary-ing balance strategies
(feedback, feedforward, or both), dependingon the constraints of a
particular task.Key words: balance, feedback vs. feedforward
control, perceptual-motor skills
ostural control has been closely associated with theability to
correctly perceive the environment through
peripheral sensory systems, as well as to centrally processand
integrate proprioceptive, visual, and vestibular inputs atthe level
of the central nervous system (CNS). That abilityenables the CNS to
form appropriate muscle synergiesneeded so that equilibrium can be
maintained (Teasdale,Lajoie, Bard, Fleury, & Courtemanche,
1992). Althoughthere is considerable evidence concerning the
importance ofsensory organization abilities for balance control in
children(Assaiante & Amblard, 1992; Sundermier &
Woollacott,1998; Sundermier, Woollacott, Roncesvalles, &
Jensen,
2000; Sveistrup & Woollacott, 1996), the exact nature
ofthose mechanisms in terms of skill development is not yetwell
explored. The focus in most studies has been on look-ing at
postural responses to visual or proprioceptive pertur-bations
(Assaiante, & Amblard, 1992; Sundermier et al.,2000) or to
sensory conflict situations created by the com-bination of the two,
such as the moving room paradigm(Sveistrup & Woollacott, 1996).
On the other hand, bothresearchers and clinicians rely on
qualitative scales ofmovement performance such as the
Bruininks-Oseretskytest for motor proficiency or the Motor Skills
Inventory(Werber & Bruininks, 1988) to assess motor skill
develop-ment and balance in children. Although those scales
areuseful for establishing an overall level of performance
ascompared with norms, they do not provide any insight intohow one
might use specific perceptual and motor skills topredict behavior
on static or dynamic balance tasks. In thepresent study, we
attempted to address balance control inchildren from the
perspective of skill development and toexamine how specific
perceptual and motor skills are relat-ed to static and dynamic
balance performance.
Before considering perceptual and motor skill contribu-tions to
balance control, one must properly address the issueof the
different strategies used by the CNS in order to main-tain
equilibrium, depending on the nature of the task, staticor dynamic.
For example, quiet standing is said to be con-trolled by sensory
feedback on the basis of a closed-loopsystem (Nashner, 1976) in
which the center of foot pressuremoves in phase with the center of
mass (Winter, Patla,
Correspondence address: Vassilia Hatzitaki, Department
ofPhysical Education and Sports Sciences, Aristotelio University
ofThessaloniki, Thessaloniki, 540 06, Greece. E-mail
address:[email protected]
161
Journal of Motor Behavior, 2002, Vol. 34, No. 2, 161170
P
-
Prince, Ishac, & Gielo-Perczak, 1998), and integration
ofvisual and proprioceptive inputs is needed for that
control(Massion & Woollacott, 1996). The importance of
visualcues in maintenance of static posture has been well
demon-strated, particularly in children, who use them to
visuallymonitor their body during posture (Gallahue &
Ozmun,1998; Riach & Hayes, 1987). In addition,
proprioceptiveinformation from virtually all areas of the body is
co-processed and integrated at a central level so that it can
con-tribute to a stable posture (Jeka, Oie, & Kiemel,
2000;Kavounoudias, Gilhodes, Roll, & Roll, 1999;
Roders,Wardman, Lord, & Fitzpatrick, 2001; Slijper &
Latash,2000).
On the other hand, balancing under dynamic task condi-tions
requires the use of feedforward control (Horak &Nashner, 1986;
Lacquaniti & Maioli, 1989). With feedfor-ward control, postural
disturbances are predicted, and thosepredictions result in
anticipatory postural adjustments(APAs) that enable the mover to
maintain stability (Massion,1992). In that case, equilibrium
control is of a more reflex-ive nature and depends on the ability
to rapidly transformperturbations of proprioceptive or vestibular
origin intoproper motor responses, an ability that has been linked
to anadequately functioning reaction time process (Lord,
Clark,& Webster, 1991; Woollacott, Shumway-Cook, &
Nashner,1986). The importance of cognitive function for the
organi-zation and integration of available sensory informationunder
both static and dynamic balancing conditions has alsobeen well
acknowledged (Schmidt, 1982; Shumway-Cook& Woollacott, 2000;
Vuilerme, Nougier, & Teasdale, 2000;Woollacott, Moore, &
Hu, 1992). Nevertheless, the differen-tial contributions of skills
such as depth perception and reac-tion time or cognitive skills
such as attention to the perfor-mance of static or dynamic balance
tasks have not beenlargely explored. Because task constraints are
different forstatic and dynamic balance, we hypothesized that,
depend-ing on whether task constraints were static or dynamic,
dif-ferent perceptual and motor skills would be associated
withbalance, reflecting feedback or feedforward mechanisms
ofbalance regulation, respectively.
The selection of the appropriate balance strategy in eachcase
not only depends on task constraints and environmen-tal demands but
is also a function of neural maturation andexperience. A
feedback-based system in the control of bal-ance appears very early
in life, as confirmed by experimen-tal evidence showing that
postural response synergies trig-gered by sensory perturbations are
present as early as 1531months and have latencies comparable with
those of adults(Shumway-Cook & Woollacott, 1985). On the other
hand, achilds ability to apply feedforward control and initiate
anAPA to upcoming perturbations greatly depends on the abil-ity to
control gravity and inertial forces (Berger, Quintern,& Dietz,
1987; Grasso, Assaiante, Prevost, & Berthoz,1998; Schmitz,
Martin, & Assaiante, 1999) and to move thehead independently of
the trunk (Assaiante & Amblard,1995), skills that develop
later, between 6 and 10 years of
age. However, the presence of a developmental
anticipatorybehavior is task specific and is shaped through
exerciseand training in the specific environment (Haas &
Diener,1988, p. 58), and depends on whether the perturbation
isexternally imposed or self-initiated (Riach & Hayes,
1987).
We designed the present study to examine whether 11-
to13-year-old children are capable of selecting the appropri-ate
balance strategy depending on task constraints, static ordynamic.
The childs ability to select a feedforward- orfeedback-based
control mechanism would be reflected inthe differential
contribution of specific perceptual-motorskills to balance
performance depending on whether theparticular task conditions are
static or dynamic. Childrenperformed a series of static and dynamic
balance exercisesduring one-legged stance on a force platform,
whichallowed us to quantify balance characteristics. They werethen
assessed in a series of perceptual-motor tests involvingreaction
time, depth perception, sustained attention, kines-thesis, and
visuomotor coordination measures. We used amultiple correlation
approach to investigate balance on thebasis of a multilayered or
multifactorial spectrum of select-ed motor, perceptual, and
cognitive skills.
Method
ParticipantsFifty boys (11 1.7 years of age) volunteered to
partici-
pate in the present study following informed consent. Noneof the
children had a pathological disorder associated witheither the
visual or vestibular system or had been involvedin sports
activities in which a single-limb stance was used.At the beginning
of the experimental session, participantswere asked to declare
their dominant kicking leg. All bal-ance exercises requiring
one-legged stance were performedon the limb contralateral to the
dominant kicking leg.
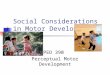
Experimental Task and ProtocolStatic and dynamic balance tests.
We achieved static bal-
ance conditions by asking participants to stand on the
forceplatform on one leg (single-limb stance). The nonsupport-ing
limb was flexed at the knee, with the foots plantar sur-face
stabilized on the knee of the supporting leg (storkbalance; see
Figure 1a). At the go signal, each child wasrequired to elevate his
heel and to keep his balance for aminimum duration of 5 s,
narrowing his base of support toan area of a few centimeters.
In the dynamic balance test, the children had to stand onthe
force platform on one leg while performing two differ-ent exercises
with the nonsupporting limb (Figure 1b and c).The first exercise
involved repetitive hip flexion and exten-sion of the swinging
limb, and the second required the chil-dren to perform hip
abductionadduction in a similar way.Hip flexionextension induced a
perturbation in the anteri-orposterior (x) direction, and hip
abductionadductionsimilarly introduced a perturbation in the
mediolateral (y)direction. Participants were instructed to perform
both exer-
V. Hatzitaki, V. Zisi, I. Kollias, & E. Kioumourtzoglou
162 Journal of Motor Behavior
-
cises as fast as possible and at their full range of
motion.Dynamic balance exercises were performed repeatedly overa
time period of 5 s. Each participant performed two test tri-als
following a practice trial, and, on the basis of maximumforce
output, we selected the better of the two trials for fur-ther
analysis. Those trials in which the child was unable tosustain his
balance for a period of 5 s were excluded fromfurther analysis.
Five of the children tested were unable tokeep their balance for 5
s in one of the static or dynamic bal-ance exercises, and as a
result of that inability, their datawere not considered in the
subsequent analysis.
Perceptual-motor tests. In addition to balance testing,
thechildren performed the following series of tests:
1. They performed a simple reaction time test to a
visualstimulus (RT visual) by using the Reaction Test software
ofthe VIENNA Test Instrument System (Schuhfried, 1996).Participants
were seated comfortably behind a monitor,with the index finger of
their dominant hand resting on atouch-sensitive key. As soon as a
black circle turned yellow,they had to press a bar button located 8
cm above the rest-ing key. The release of the resting key, with
consequentpressing of the reaction button at stimulus appearance,
wasconsidered a correct reaction. Reaction time was defined asthe
interval between the onset of the stimuli and the releaseof the
resting key. After oral instructions and four subse-quent correct
responses in the practice phase, the childrenperformed 24 trials.
Intertrial interval was varied between2.5 to 6.5 s. The mean
reaction time of the correct reactionswas recorded.
2. The children performed a simple reaction test to anauditory
stimulus (RT auditory) with a different software
version of the VIENNA Test Instrument System. The pro-cedure and
recording were the same as before. However, theauditory stimulus in
that test was a tone (frequency of 2000Hz) presented on earphones
via the systems interface.
3. The children performed a discrimination reaction timetest
(DRT) with another version of the Reaction Test soft-ware. A red
light, a combined red-yellow light, a tone, andcombinations of the
three were presented alternatively onthe monitor. The children had
to react only to the criticalstimulus, which was the simultaneous
onset of red and yel-low lights. The response procedure and
recording wereexactly the same as with the simple reaction time
test.
4. The children performed a choice reaction time test(CRT) with
the Determination Test software of the VIEN-NA Test Instrument
System. The children were seatedbehind a monitor and had to react
to seven different visualand two different auditory stimuli by
using their upper andlower limbs. They had to press one of five
round coloredbuttons, arranged in a semicircle on the working
panel, assoon as a circle of the corresponding color appeared on
thescreen. Finally, they were also required to press a left orright
foot pedal as soon as a white rectangle appeared on
thecorresponding side of the screen. The frequency of
stimuluspresentation was controlled by the childs working
speed.After oral instruction and separate instruction phases for
thethree types of stimuli (round circle, white rectangles,
andtones) and the combination of the three, the children per-formed
the test for 4 min. The mean reaction time (in mil-liseconds) and
the total number of correct and incorrectresponses were
recorded.
5. The children performed a sustained attention test
Static and Dynamic Balance in Children
June 2002, Vol. 34, No. 2 163
FIGURE 1. Schematic representation of the static and dynamic
balance tasks: a. Static bal-ance. b. Dynamic balance I:
flexionextension. c. Dynamic balance II: abductionadduction.
-
(ATN), using the continuous attention test software of theVIENNA
Test Instrument System. The children were seat-ed comfortably
behind a monitor, with the index finger ofthe dominant hand resting
on the lower bar button of aworking panel. A row of seven
triangles, pointing upward ordownward, was presented on the screen
with irregularjumps. The children had to press the bar button as
soon asthey realized that three of the triangles were pointing
down-ward (critical stimulus). After successive completion of
apractice phase, the children performed the test for 10 min.During
that period, 80 critical stimuli out of 400, with alength of 1.5 s
each, were presented. The numbers of cor-rect and incorrect
responses as well as the mean reactiontime (in milliseconds) for
those responses were recorded.
6. The children performed a line-tracking test (LT) withthe
Motor Performance Series of the VIENNA Test System.Using a stylus,
the children had to track a path on a verticalwork board without
touching the sides or the rear. After onepractice trial, they
performed one trial, and the total time oftrial completion and
numbers of errors were recorded.
7. The children performed a depth perception test (DPF,DPB) with
the Electric Depth Perception Tester (Takei Sci-entific
Instruments, Tokyo, Japan). The children were seat-ed, and their
chin was stabilized so that they could see a par-ticular visual
field through a slot located 120 cm away ateye level. Through that
slot, they could see a dowel movingforward or backward at a speed
of 50 mm/s, and they had topress a button as soon as they realized
that the dowel wasaligned with two other dowels located bilaterally
20 cmaway from the moving dowel. Although the test instrumentis
designed so that depth perception can be measured, it isset up so
that performance outcome also involves a signifi-cant motor
reaction time as well as an anticipatory compo-nent. The influence
of motor response speed on perfor-mance was eliminated, however,
because the movement ofthe experimental dowel was very slow (50
mm/s); in addi-tion, the dowels motion was always available to the
chil-drens sight, suggesting involvement of an
anticipatorymechanism as part of the response. To further eliminate
thepossibility that a delay in pressing the button would
beattributed to an incorrect motor response, we gave the chil-dren
one practice trial to make sure that they were acquaint-ed with the
motor task and could control their movement sothat they could get
the result they wanted. A second practicetrial was given in
instances of bad movement control. Afterpractice, participants
proceeded to perform four trials ineach moving direction of the
dowel (forward and back-ward). Distance error from the alignment
point was record-ed for each trial in millimeters, and a mean of
those valueswas calculated separately for the forward and
backwardmovements.
8. The children performed a kinesthetic sense test withthe
kinesthesiometer (Lafayette Instrument Co., Lafayette,IN). The
children were seated in parallel with a horizontallever that
rotated about the vertical axis. The childrenplaced their dominant
forearm on the lever so that the axis
of rotation was aligned with the elbow joint. At the
startingposition, the forearm was flexed 90 at the elbow.
Offeringmanual help, the instructor guided the children arm so
thatit moved the lever 60 into extension, which signified aposition
that corresponded to a 150 elbow angle. Thatmovement was repeated
for a second time, with the childrenblindfolded. They were then
instructed to move the lever tothe desired target position. which
corresponded to a 150elbow angle. After two practice trials, one
with eyes openand the other blindfolded, they performed eight test
trialsblindfolded. Lever position was recorded for each trial,
andthe mean absolute deviation from the 150 angle was calcu-lated
(mean error).
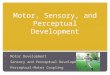
Analysis of BalanceAn AMTI force platform (Model OR6-5-1000;
Advanced
Mechanical Technology, Inc., Watertown, MA) recorded ata rate of
50 samples per second the ground reaction forces(Fx, Fy, and Fz)
exerted on the support foot during perfor-mance of the balance
exercises. A representative trial,which depicts the ground reaction
force components duringperformance of the flexionextension
exercise, is shown inFigure 2. We used a simplified method based on
force plat-form measurements in order to estimate the maximum
dis-placement of the center of mass (COM) in the anteriorpos-terior
(x), mediolateral (y), and vertical (z) directions
duringperformance of the balance exercises (Shimba, 1984;
Zat-siorksy & King, 1998). In that method, one uses the
threeground reaction force components (Fx, Fy, and Fz) in orderto
estimate COM position. Because the ground reactionforce component
in each direction is proportional to theacceleration of the COM in
the respective direction, its sec-ond integral represents the COM
displacement in eachdirection. One estimates the integration
constants by usinga technique, called zero-point-to-zero-point
integration,which is based on the postulate that center of foot
pressure(COP) and COM positions coincide when Fx is zero. Thedouble
integration of x (t) = Fx(t)/m starts at the time whenFx is zero
and continues until Fx is again zero. The sameprocedure continues
from one zero point to the next zeropoint. That technique was
analytically described by Zat-siorsky and King (1998) and was found
to be in good agree-ment with estimations of the COM position from
kinematicdata for situations in which dynamics are not
significant(e.g., quiet stance, postural disturbances), confirming
thevalidity of the suggested algorithm (Caron, Faure, &Brenire,
1997; Zatsiorsky & King, 1998). We subtractedthe positive value
of the maximum COM displacement esti-mated by using the
aforementioned technique from the sub-sequent maximum negative COM
position in order to esti-mate the maximum amplitude of the COM
oscillation in theanteriorposterior (A/P), mediolateral (M/L), and
verticaldirections. That value was used as an index of postural
sta-bility during performance of static and dynamic
balancetasks.
V. Hatzitaki, V. Zisi, I. Kollias, & E. Kioumourtzoglou
164 Journal of Motor Behavior
-
Statistical AnalysisWe investigated the relationship between
balance and
perceptual-motor abilities by using multiple correlation
andlinear regression analysis techniques. All reaction time,depth
perception, attention, kinesthesis, and visuomotorcoordination
measures examined in the present study wereinitially placed in a
simple correlation (Pearson productmoment), with the postural
stability index defined as themaximum amplitude of the COM
oscillation in each of thethree directions. Following correlation,
we formulated amultiple linear regression model to identify those
perceptu-al-motor variables that could predict static and dynamic
bal-ance. We included in the equations only those variablesfound to
be significantly correlated with balance, and weused stepwise
regression to test the models power in pre-dicting static and
dynamic balance from the perceptual-motor abilities examined in the
present investigation.
ResultsStatic Balance
During performance of the static balance test (the
storkbalance), the maximum shift of the COM had mean valuesof 5.2
cm, 4.6 cm, and 3.5 cm in the A/P, M/L, and verticaldirections,
respectively (Table 1). The analysis revealed thatpostural
stability, expressed by the maximum amplitude ofthe COM oscillation
in the M/L plane, was highly associat-ed with depth perception (r =
.475, p < .01) when the visu-al stimuli were moving away from
the children (backwarddirection; see Table 2). A positive
correlation indicated thatthe greater the COM displacement, that
is, the greater theinstability in the M/L plane, the greater the
amount of spa-tial error in the depth perception test. Balance in
the M/Ldirection, as expressed by the same index, was also
signifi-
cantly correlated with the number of errors in the LT test (r =
.482, p < .01), indicating that children with greateramplitude
shift of the COM in the M/L direction were proneto a greater number
of errors in the visuomotor coordinationtest. Finally, the
amplitude of the COM oscillation in theA/P direction was
moderately, yet significantly, correlatedwith the total number of
incorrect responses (r = .299, p .05) in the CRT.
Using variables (LT and DPB) that showed a significant
Static and Dynamic Balance in Children
June 2002, Vol. 34, No. 2 165
FIGURE 2. A representative trial showing ground reaction forces
(Fx, Fy, Fz) recorded on thesupport foot during performance of the
flexionextension exercise.
TABLE 1Mean (M) and Standard (SD) Deviation
of the Maximum Amplitude of the Centerof Mass Displacement in
Each Direction
During Performance of the Staticand Dynamic Balance
Exercises
Flexion- Abduction-Static Extension Adduction
M SD M SD M SD
A/P direction (x).0529 .0319 .0428 .0218 .0396 .0100
M/L direction (y).0460 .0246 .0507 .0153 .0751 .0268
Vertical direction (z).0358 .0256 .0547 .0228 .0584 .0365
Note. N = 45. All displacements are in meters. A/P =
anteriorpos-terior, M/L = mediolateral.
-
relationship to the amplitude of the COM oscillation in theM/L
direction, we formulated a linear regression model toenable us to
predict performance in the static balance testfrom the depth
perception and visuomotor coordinationmeasures (Table 3). The
stepwise regression analysisrevealed that a model that included
both variables as pre-dictors could explain 31.7% of the variance
in the COM dis-placement in the M/L direction, and that prediction
washighly significant, F(2, 42) = 9.29, p < .001. The
variationwas accounted for by the number of errors in the line
track-ing, t = 2.35, p < .05, and depth perception, t = 2.213, p
.05, did not enter theregression equation, mainly because of its
significant rela-tionship to DRT (r = .784, p < .01), indicating
that the twovariables explained the same amount of variation in
thedata.
DiscussionIn the present study, we investigated the contribution
of
selected perceptual, cognitive, and motor skills to
balancecontrol in children between the ages of 11 and 13 years.Two
different balance conditions were tested. The firstrequired
unperturbed standing balance under static condi-tions (quiet
one-leg standing), and the second involved reac-tions to postural
self-induced disturbances evoked by rapidhip flexionextension or
abductionadduction. The resultsconfirmed the hypothesis that,
depending on the imposedenvironmental constraints and nature of the
balance task,static or dynamic, the selection of the appropriate
balancestrategy and therefore the perceptual, motor, and
cognitiveprocesses involved in maintaining equilibrium can be
quite
different (Assaiante & Amblard, 1995; Haas &
Diener,1988). Moreover, we found that 11- to 13-year-old
childrenare capable of applying strategies that significantly
resem-ble those used by adults for maintaining equilibrium
understatic or dynamic conditions.
The significant relationship of static balance with
depthperception and with visuomotor coordination suggests
thatone-leg standing is regulated by a feedback-based mecha-nism in
which sensory information from visual cuesbecomes important for the
continuous adjustments; more-over, corrections of the required
posture that are needed sothat the COM can be kept within the
narrow boundariesdefined by the base of support. Other
investigators (Ghez,1991; Nashner, 1976; Robertson, Collins,
Elliott, & Starkes,1994) have proposed a slow sensory
integration processsuch as the one just described, which is based
on a closed-loop system, as the regulating mechanism for quiet
stance.In addition, an increasing body of evidence suggests
thatinformation processed through vision, particularly
fromperipheral visual cues providing exteroceptive informationabout
the environment, is the most reliable source of per-ceptual
information for balance control, especially in chil-dren (Assaiante
& Amblard, 1995; Garland & Barry, 1990;Grasso et al., 1998;
Riach & Hayes, 1990; Williams,Davids, Burwitz, & Williams,
1994). However, the abilityto interpret and use peripheral visual
cues is associated withincreasing accuracy and consistency of eye
movements,which is acquired with age (Starkes & Riach, 1990)
and isnot achievable in younger children. For that reason,
childrenbetween 6 and 7 years of age rely mostly on
vestibularinformation about head position relative to the
supportingsurface; that information becomes progressively more
avail-able to the equilibrium control centers as a result of
theacquisition of the head stabilization in space strategy
(Assaiante & Amblard, 1995; Assaiante, Marchand, &Amblard,
1989; Forssberg & Nashner, 1982). The relativecontribution of
peripheral vision in equilibrium controlincreases from 8 to 9 years
of age to adulthood (Assaianteet al., 1989). In adults, peripheral
visual cues as well asvisual motion cues have been reported to play
a particular-ly important role in postural control (Amblard,
Crmieux,Marchand, & Carblanc, 1985). The results of the
presentstudy confirmed the important role of peripheral visual
cuesfor postural stabilization in 11- to 13-year-old children
aswell. In addition to that finding, we showed that the
rela-tionship between balance and visual motion cues was
sig-nificant only under conditions involving motion of
theexperimental dowel in the backward direction. That findingmay
indicate the higher contribution of vision during cor-rective
backward body sway, when visual cues appear to bemoving away from
the eyes. Exteroceptive information canbe available through the
kinesthetic system as well,although it has been suggested that
vision provides an easi-er anchoring for that information to the
gravito-inertia ref-erence frame (Patla, 1999). In the present
study, poor corre-lation of kinesthesis with both static and
dynamic balance
Static and Dynamic Balance in Children
June 2002, Vol. 34, No. 2 167
TABLE 4Stepwise Regression of Dynamic Balance(Amplitude of
Center of Mass Oscillationin the x Direction) on Simple Visual
(SRT)and Discrimination (DRT) Reaction Times
in the Dynamic Balance,Abduction/Adduction Exercise
Model: COM = int + 1 DRT, 43 df,MS = .000787, F = 9.15, p <
.004**, R2 = .176
Hypothesis testing about the model parameters
Parameters t p < Partial RDRT .419 3.026 .004** .419 inSRT
.210 .938 .354 .143 out
Note. COM = amplitude of maximum center of mass oscillation
inthe anterioposterior (x) direction, and in and out indicate in or
outof the regression equation (model).
-
measures was observed. That finding can be attributed tothe fact
that all balance exercises were performed with eyesopen, although,
on the other hand, kinesthesis was tested inthe absence of vision.
The predominance of visual over pro-prioceptive cues for static and
dynamic equilibrium is notnew (Assaiante & Amblard, 1995;
Garland & Barry, 1990;Williams et al., 1994). We speculate that
under the condi-tions involving vision, the afferent contributions
of thekinesthetic system to static balance control are
seriouslylimited.
In contrast to one-leg quiet stance, in which a
significantreliance on visual cues was found, and in accordance
withprevious studies (Do, Brenire, & Brenguier, 1982;
Woolla-cott et al., 1986), balance performance under dynamic
con-ditions involving a self-induced perturbation in the M/Lplane
was predominantly associated with an adequatelyfunctioning reaction
time process. Short reaction times areknown to be associated with
preparatory adjustments in agiven perturbation and to reduce the
disturbance of theCOM during performance of postural tasks (Riach
&Hayes, 1987). According to the results of the present
study,the ability to rapidly respond to a destabilization induced
byrapid hip abductionadduction in order to maintain equilib-rium is
greatly dependent on reaction time. That findingsuggests that
postural reactions to rapid hip abduc-tionsadductions are
preprogrammed in an open-loop fash-ion, whereas the child has the
ability to apply feedforwardcontrol in his other movement and
therefore to reliablycoordinate posture with the performed task.
Balance controlin that case is temporally organized in a descending
order,from head to toe (Assaiante & Amblard, 1995).
Recentexperimental evidence suggests that such an
anticipatory,open-loop (feedforward) mode of balance control
appears ataround the age of 7 years and continues through
adulthood(Grasso et al., 1998; Ledebt, Bril, & Brenire, 1998).
Incontrast, a feedback-based control corresponding to anascending
organization of balance control from foot to head(in posture) and
hip to head (in locomotion) is more char-acteristic of children
under the age of 6 (Assaiante &Amblard, 1995). According to the
same authors, the ascend-ing, descending, and mixed strategies all
co-exist in adults,and the selection of one or another and their
relevant con-tributions greatly depend on the particular task
conditions.For example, in difficult balance situations, the
descendingstrategy (from head to toe) is always dominant. On the
basisof our present findings, we speculate that dominance of
thatstrategy is also true for children between the ages of 11 and13
years, when, according to studies reported in the litera-ture, the
complexity of the CNS with respect to balancecontrol strongly
resembles that of an adult (Berger et al.,1987; Ledebt et al.,
1998). We showed that balancing understatic conditions was strongly
associated with the ability toperceive and process visual
information, an ability that isimportant for feedback-based control
of balance (ascendingstrategy). On the other hand, when greater
task demandswere imposed on the system under dynamic balancing
con-
ditions, the ability to respond to the destabilizing hip
abduc-tionsadductions in order to maintain equilibrium was
asso-ciated with the motor response speed, implying the
possibleinvolvement of a descending, feedforward strategy in
thecontrol of balance. The significant association of
dynamicbalance with discrimination reaction time suggests,
howev-er, that although postural reactions to hip
abductionadduc-tion perturbations seem to be preprogrammed in an
open-loop fashion, the use of sensory information or
cognitiveprocessing at a later stage to modulate the response is
notprecluded. Further evidence in support of cognitive
contri-butions to the control of both static and dynamic balancewas
provided by the significant relationship between thenumbers of
errors in the choice reaction time test and inboth static and
dynamic balance indices. Because the num-ber of incorrect responses
in the choice reaction time testrepresented the speed of
information processing in theresponse selection stage, that
relationship suggests that cog-nitive interventions targeted to
speed up processes of a cer-tain stage may also be involved in both
static and dynamicequilibrium control (Thomas, Thomas, &
Gallagher, 1993).Those findings are in agreement with previous
studiesshowing that postural control might rely not only on
periph-eral sensory information but also on higher-level
systemsresponsible for integrating sensory information (Teasdale
etal., 1992; Woollacott et al., 1992; Woollacott et al.,
1986).There is no doubt, however, that the relationship
betweenpostural control and cognitive processes is rather
complex,and researchers must perform further research to
substanti-ate any findings concerning cognitive contributions to
pos-tural control.
Another interesting finding of the present study is thatmotor
response speed, as reflected in reaction time mea-sures, seems to
be an important element in dynamic balancecontrol only when
postural disturbance occurs in the frontal(M/L) plane. In contrast,
when destabilization occurred inthe A/P plane because of rapid hip
flexionextension, noassociation between the amplitude of the COM
oscillationand reaction time was noted. There are several possible
rea-sons for that task-specific contribution of reaction time
indynamic balance control. First of all, reactive control of
bal-ance, through a reflex-activated feedback loop, might not bethe
only mechanism used by the CNS to control the positionof the COM in
response to external perturbations (Rietdyk,Patla, Winter, Ishac,
& Little, 1999). Alternatively, it is pos-sible that the CNS
uses muscle tone to set joint stiffness tocontrol body posture. In
the sagittal plane, there is stiffnesscontrol at the ankle
plantarflexors, whereas in the frontalplane, the hip
abductorsadductors provide that control. Onthe basis of those
findings, we speculate that the inherentproperties of the muscles
and passive tissue around theankle could have provided an immediate
resistance to theA/P perturbation, eliminating the need for
voluntary activemuscle activation during performance of the
flexionexten-sion dynamic exercise. Riach and Hayes (1987), who
havealso shown that the maturation of postural responses in the
V. Hatzitaki, V. Zisi, I. Kollias, & E. Kioumourtzoglou
168 Journal of Motor Behavior
-
two planes may follow different courses in children, pro-vided
further evidence in support of that hypothesis. Thatconclusion was
based on experimental evidence showingthat the initiation of APAs
was more often in the lateral thanin the sagittal plane, indicating
the stronger associationbetween reaction time and balance control
in the lateralplane.
ConclusionBalance control during performance of different
posturo-
kinetic activities in children not only is an
age-dependentprocess associated with neural maturation but is also
asso-ciated with task or environmental constraints. The results
ofthe present study suggest that, like adults, 11- to 13-year-old
children have the ability to select varying balance strate-gies
depending on the constraints of a particular task. Bal-ancing under
static conditions was shown to be greatlyassociated with the
ability to perceive and process visualinformation, an ability that
is important for feedback-basedcontrol of balance. On the other
hand, when greater taskdemands were imposed on the system under
dynamic bal-ancing conditions, the ability to respond to the
destabilizinghip abductionsadductions so as to maintain
equilibriumwas associated with motor response speed, implying
thepossible involvement of a descending feedforward mecha-nism in
the control of balance.
ACKNOWLEDGMENTThe authors thank Patricia McKinley as well as the
two anony-
mous reviewers for their helpful comments and suggestions on
anearlier draft of the present article. The present study was
partiallysupported by a research grant from the National
ScholarshipsFoundation.
REFERENCESAmblard, B., Crmieux, J., Marchand, A. R., &
Carblanc, A.
(1985). Lateral orientation and stabilization of human
stance:Static versus dynamic visual cues. Experimental
BrainResearch, 61, 2137.
Assaiante, C., & Amblard, B. (1992). Peripheral vision and
age-related differences in dynamic balance. Human Movement
Sci-ence, 11, 533548.
Assaiante, C., & Amblard, B. (1995). An ontogenetic model
forthe sensorimotor organization of balance control in humans.Human
Movement Science, 14, 1343.
Assaiante, C., Marchand, A. R., & Amblard, B. (1989).
Discretevisual samples may control locomotor equilibrium and
footpositioning in man. Journal of Motor Behavior, 21, 7291.
Berger, W., Quintern, J., & Dietz, V. (1987). Afferent and
efferentcontrol of stance and gait: Developmental changes in
children.Electroencephalography and Clinical Neurophysiology,
66,244252.
Caron, O., Faure, B., & Brenire, Y. (1997). Estimating the
centreof gravity of the body on the basis of the centre of pressure
instanding posture. Journal of Biomechanics, 30, 11691171.
Do, M. C., Brenire, Y., & Brenguier, P. (1982). A
biomechanicalstudy of balance recovery during the fall forward.
Journal ofBiomechanics, 15, 933939.
Forssberg, H., & Nashner, L. M. (1982). Ontogenetic
developmentof postural control in man: Adaptation to altered
support and
visual conditions during stance. Journal of Neuroscience,
2,545552.
Gallahue, D. L., & Ozmun, J. C. (1998). Understanding
motordevelopment (2nd ed.). Dubuque, IA: Brown and Benchmark.
Garland, D. J., & Barry, J. R. (1990). Sport expertise: The
cogni-tive advantage. Perceptual and Motor Skills, 70,
12991314.
Ghez, C. (1991). Posture. In E. Kandel, T. Schwartz, & M.
Jessel(Eds.), Principles of neural science (pp. 596607). New
York:Elsevier Science.
Grasso, R., Assaiante, C., Prevost, P., & Berthoz, A.
(1998). Devel-opment of anticipatory orienting strategies during
locomotortasks in children. Neuroscience Biobehavioral Reviews,
22,533539.
Haas, G., & Diener, H. C. (1988). Development of stance
controlin children. In B. Amblard, A. Berthoz, & F. Clarac
(Eds.), Pos-ture and gait: Development, adaptation and modulation
(pp.4958). Amsterdam: Elsevier.
Horak, F. B., & Nashner, L. M. (1986). Central programming
ofpostural movements: Adaptations to altered support
surfaceconfigurations. Journal of Neurophysiology, 55,
13691381.
Jeka, J., Oie, K. S., & Kiemel, T. (2000). Multisensory
informationfor human postural control: Integrating touch and
vision. Exper-imental Brain Research, 134, 107125.
Kavounoudias, A., Gilhodes, J. C., Roll, R., & Roll, J. P.
(1999).From balance regulation to body orientation: Two goals
formuscle proprioceptive information processing? ExperimentalBrain
Research, 124, 8088.
Lacquaniti, F., & Maioli, C. (1989). The role of preparation
in tun-ing anticipatory and reflex responses during catching.
Journalof Neuroscience, 9, 134148.
Ledebt, A., Bril, B., & Brenire, Y. (1998). The build-up of
anticipatory behaviour. An analysis of the development of gait
initiation in children. Experimental Brain Research, 120,917.
Lord, S. R., Clark, R. D., & Webster, I. W. (1991). Visual
acuityand contrast to sensitivity in relation to falls in an
elderly popu-lation. Age and Ageing, 20, 175181.
Massion, J. (1992). Movement, posture and equilibrium:
Interac-tion and coordination. Progress in Neurobiology, 38,
3556.
Massion, J., & Woollacott, M. (1996). Posture and
equilibrium. InA. Bronstein, T. Brandt, & M. Woollacott (Eds.),
Clinical dis-orders of balance, posture and gait (pp. 118). London:
OxfordUniversity Press.
Nashner, L. M. (1976). Adapting reflexes controlling the
humanposture. Experimental Brain Research, 26, 5972.
Riach, C. L., & Hayes, K. C. (1987). Maturation of postural
swayin young children. Developmental Medicine and Child Neurol-ogy,
29, 650658.
Riach, C. L., & Hayes, K. C. (1990). Anticipatory postural
controlin children. Journal of Motor Behavior, 22, 250266.
Rietdyk, S., Patla, A. E., Winter, D. A., Ishac, M. G., &
Little, C.E. (1999). Balance recovery from medio-lateral
perturbations ofthe upper body during standing. Journal of
Biomechanics, 32,11491158.
Robertson, S., Collins, J., Elliott, D., & Starkes, J.
(1994). Theinfluence of skill and intermittent vision on dynamic
balance.Journal of Motor Behavior, 26, 333339.
Roders, M. W., Wardman, D. L., Lord, S. R., & Fitzpatrick,
R. C.(2001). Passive tactile sensory input improves stability
duringstanding. Experimental Brain Research, 136(4), 514522.
Schmidt, R. A. (1982). Motor control and learning: A
behavioralemphasis. Champaign, IL: Human Kinetics.
Schmitz, C., Martin, N., & Assaiante, C. (1999). Development
ofanticipatory postural adjustments in a bimanual load-lifting
taskin children. Experimental Brain Research, 126, 200204.
Schuhfried, G. (1996). Manuals of the VIENNA Test
InstrumentSystems. Mdling, Austria: Schufried Eigenverlag.
Static and Dynamic Balance in Children
June 2002, Vol. 34, No. 2 169
-
Shimba, T. (1984). An estimation of center of gravity from
forceplatform data. Journal of Biomechanics, 17, 5360.
Shumway-Cook, A., & Woollacott, M. (1985). The growth of
sta-bility: Postural control from a developmental perspective.
Jour-nal of Motor Behavior, 17, 131147.
Shumway-Cook, A., & Woollacott, M. (2000).
Attentionaldemands and postural control: The effect of sensory
context.Journal of Gerontology A: Biological Science Medical
Science,55(1), M10-6.
Slijper, H., & Latash, M. (2000). The effects of instability
andadditional hand support on anticipatory postural adjustments
inleg, trunk and arm muscles during standing. Experimental
BrainResearch, 135, 8193.
Starkes, J., & Riach, C. (1990). The role of vision in the
posturalcontrol of children. Clinical Kinesiology, 44, 7277.
Sundermier, L., & Woollacott, M. H. (1998). The influence
ofvision on the automatic postural muscle responses of
newlystanding and newly walking infants. Experimental
BrainResearch, 120(4), 537540.
Sundermier, L., Woollacott, M., Roncesvalles, N., & Jensen,
J.(2000). The development of balance control in children:
Com-parisons of EMG and kinetic variables and chronological
anddevelopmental groupings. Experimental Brain Research,136(3),
340350.
Sveistrup, H., & Woollacott, M. H. (1996). Longitudinal
develop-ment of the automatic postural response in infants. Journal
ofMotor Behavior, 28, 5870.
Teasdale, N., Lajoie, Y., Bard, C., Fleury, M., &
Courtemanche, R.(1992). Cognitive process involved for maintaining
postural sta-bility while standing and walking. G. E. Stelmach
& V.Homberg (Eds.), Sensorimotor impairment in the elderly
(pp.157168). Amsterdam: Kluwer Academic.
Thomas, J. R., Thomas, K. T., & Gallagher, J. D. (1993).
Developmental considerations in skill acquisition. In R.
Singer, M. Murphey, & K. Tennant (Eds.), Handbook of
research on sport psychology (pp. 73105). New York:Macmillan.
Werder, J. K., & Bruininks, R. H. (1988). Body skills: A
motordevelopment curriculum for children. New York:
AmericanGuidance Service.
Williams, M., Davids, K., Burwitz, L., & Williams, J.
(1994).Visual search strategies in experienced and inexperienced
soc-cer players. Research Quarterly for Exercise and Sport,
65,127135.
Winter, D. A., Patla, A. E., Prince, F., Ishac, M., &
Gielo-Perczak,K. (1998). Stiffness control of balance in quiet
standing. Jour-nal of Neurophysiology, 80, 12111221.
Woollacott, M. H. (1988). Posture and gait from newborn to
elder-ly. In B. Amblard, A. Berthoz, & F. Clarac (Eds.),
Posture andgait: Developmental adaptation and modulation (pp
423432).Amsterdam: Elsevier Science.
Woollacott, M. H., Moore, S., & Hu, M. H. (1992).
Improvementsin balance in the elderly through training in sensory
organiza-tion abilities. In G. E. Stelmach & V. Homberg (Eds.),
Sensori-motor impairment in the elderly (pp. 377392).
Amsterdam:Kluwer.
Woollacott, M. H., Shumway-Cook, A., & Nashner, L. M.
(1986).Aging and posture control: Changes in sensory organization
andmuscular coordination. International Journal of Aging andHuman
Development, 23, 97114.
Zatsiorsky, V. M., & King, D. L. (1998). An algorithm for
deter-mining gravity line location from posturographic
recordings.Journal of Biomechanics, 31, 161164.
Submitted December 23, 1999Revised October 11, 2000
Second revision March 1, 2001
V. Hatzitaki, V. Zisi, I. Kollias, & E. Kioumourtzoglou
170 Journal of Motor Behavior