Embed Size (px)
Citation preview
IEEE IV 2011, June 5 2011, Baden-Baden How can new sensor technologies impact next generation safety systems?
Perception Horizon Approach to Accident Avoidance
by Active Intervention
Presenter:
S. Durekovic Principal Engineer,
NAVTEQ
2
Project overview: History
• October 2006: First ideas for follow-up activities after PReVENT
• December 2006: Workshop in Rüsselsheim, working name for a
new project: AVOID
• January 2007: Aachen – Definition of project structure
• March 2007: Brussels (AVOID – interactIVe) – finalisation
of project framework
• May 2007: Submission
• June 2007: Hearing
New Start
• 29. May 2008: EUCAR – Decision of project resubmission
• Submission: 1. April 2009
• Hearing: 9. June 2009
• October 2009: Grant Agreement

3
Project overview: Facts
• Budget: EUR 30 Million
• Co-funding by the European Commission: EUR 17 Million
• Duration: 42 months (January 2010 – June 2013)
• Coordinator: Aria Etemad, Ford Research and Advanced
Engineering Europe
• 10 Countries: Czech Republic, Finland, France, Germany, Greece,
Italy, Spain, Sweden, The Netherlands, UK

4
Consortium
• OEMs
• Suppliers
• Research
• SMEs
5
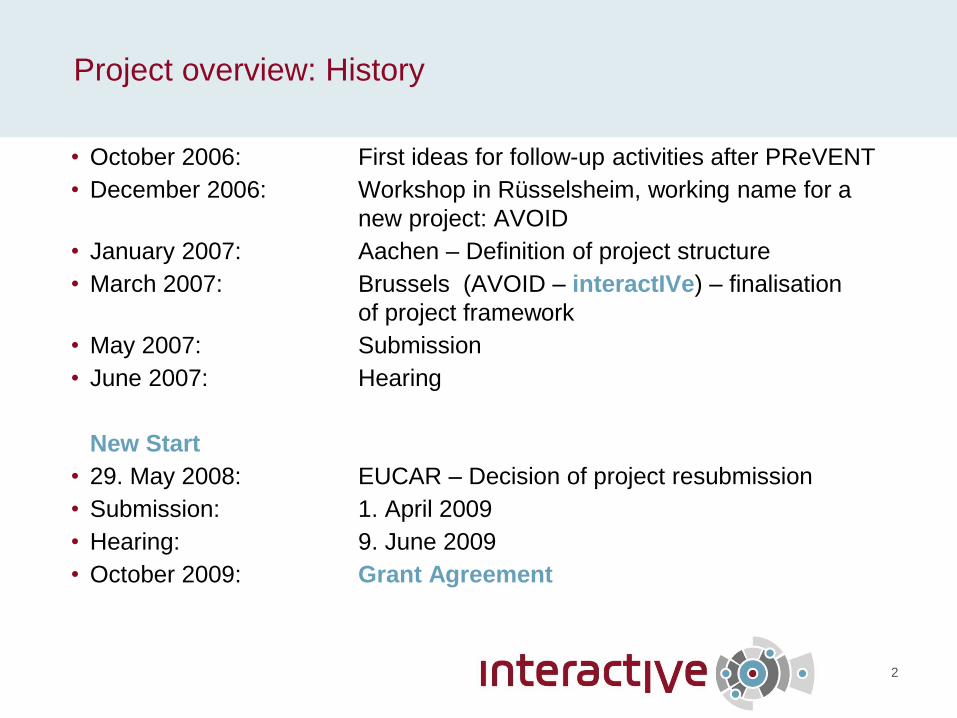
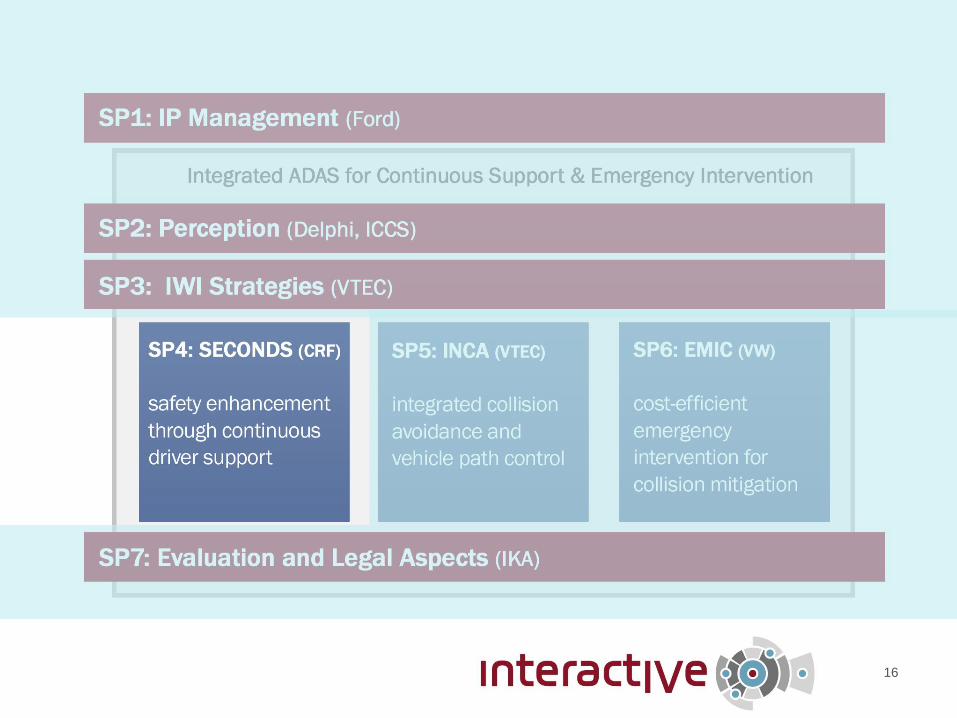
Mission: Research concept
SECONDS EMIC INCA
Continuous driver
support
Collision
avoidance
Collision
mitigation
6
Objectives
• Create an innovative model and platform for enhancing the perception of
the driving situation
• Extend range of possible scenarios and usability of ADAS by multiple
integrated functions and active interventions
• Improve decision strategies for active safety and driver-vehicle-interaction
• Develop solutions for collision mitigation that can improve the market in-
take within lower-class vehicle segments
• Further encourage the application of standard methodologies for the
evaluation of ADAS
7 PLEASE FILL
IN THE DATE
Project presentation
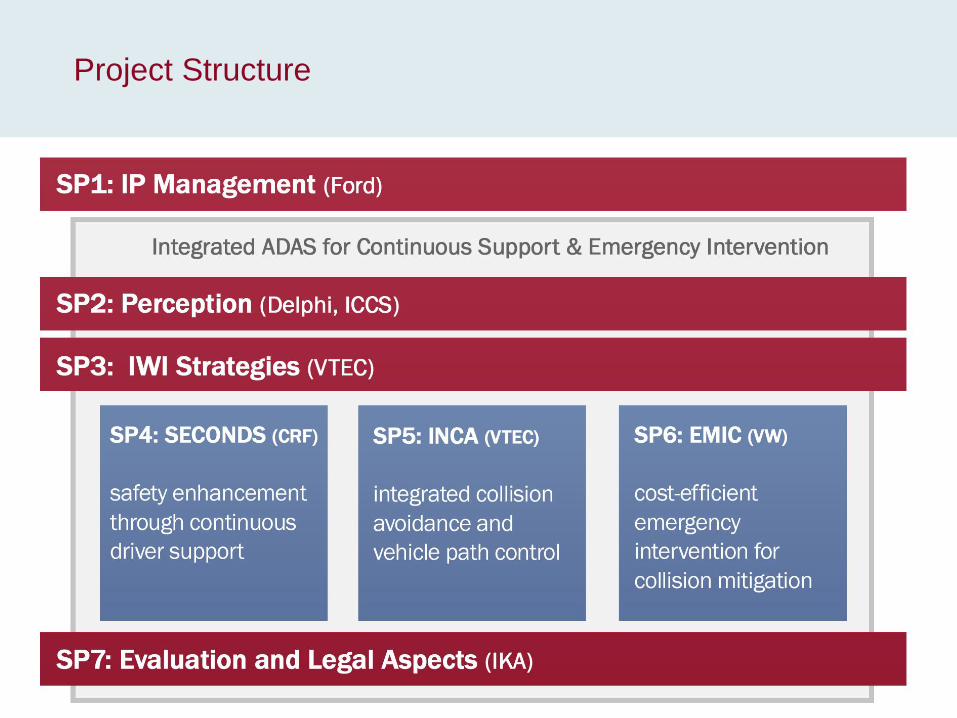
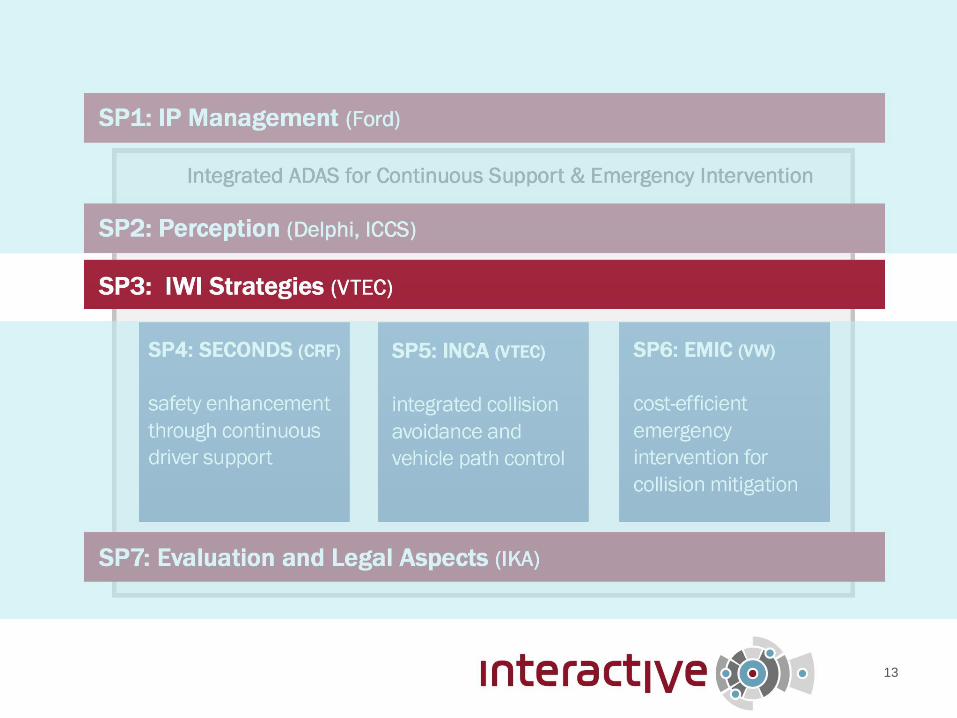
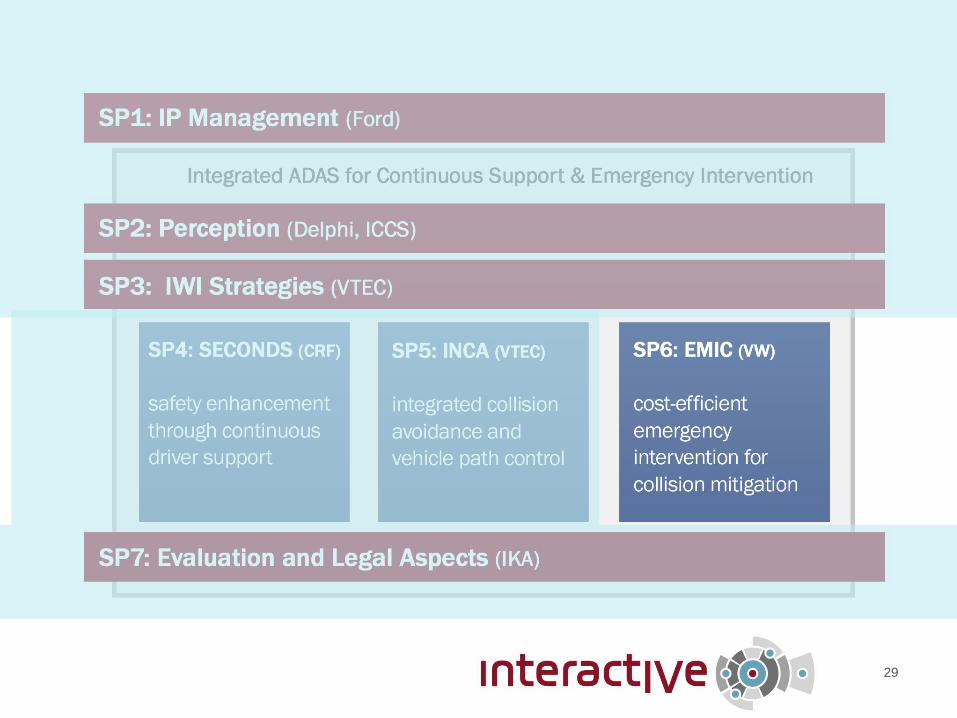
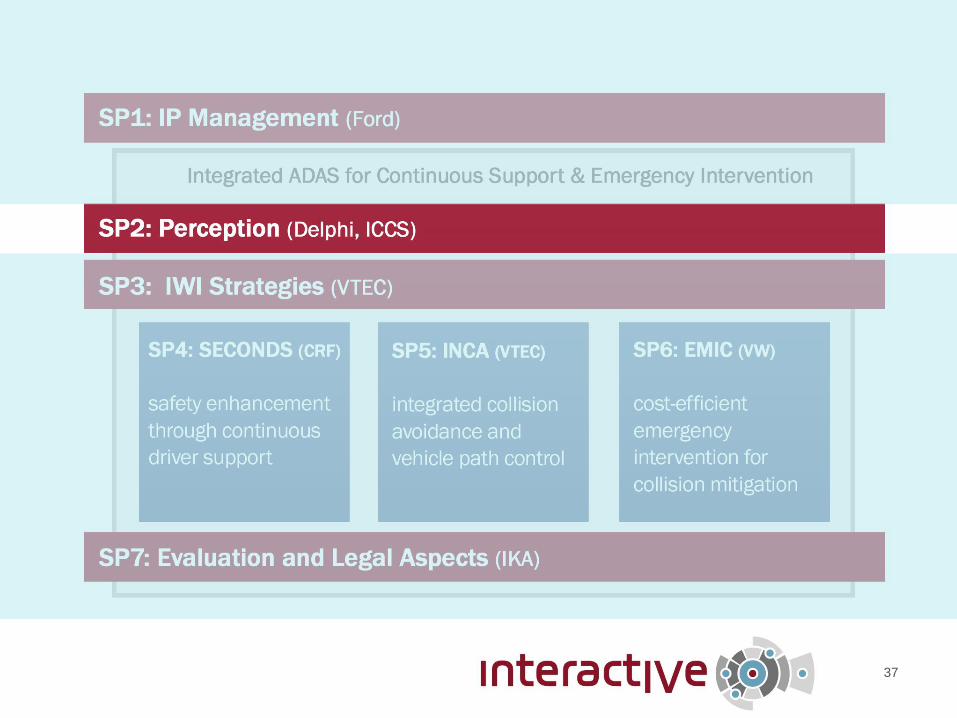
Project Structure
8
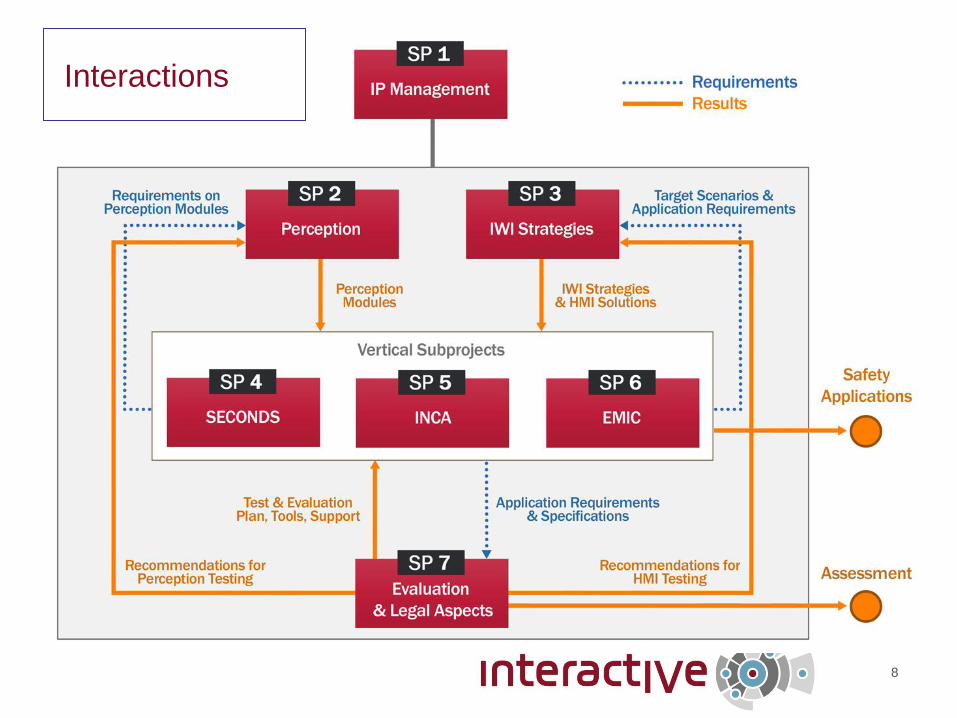
Interactions
9
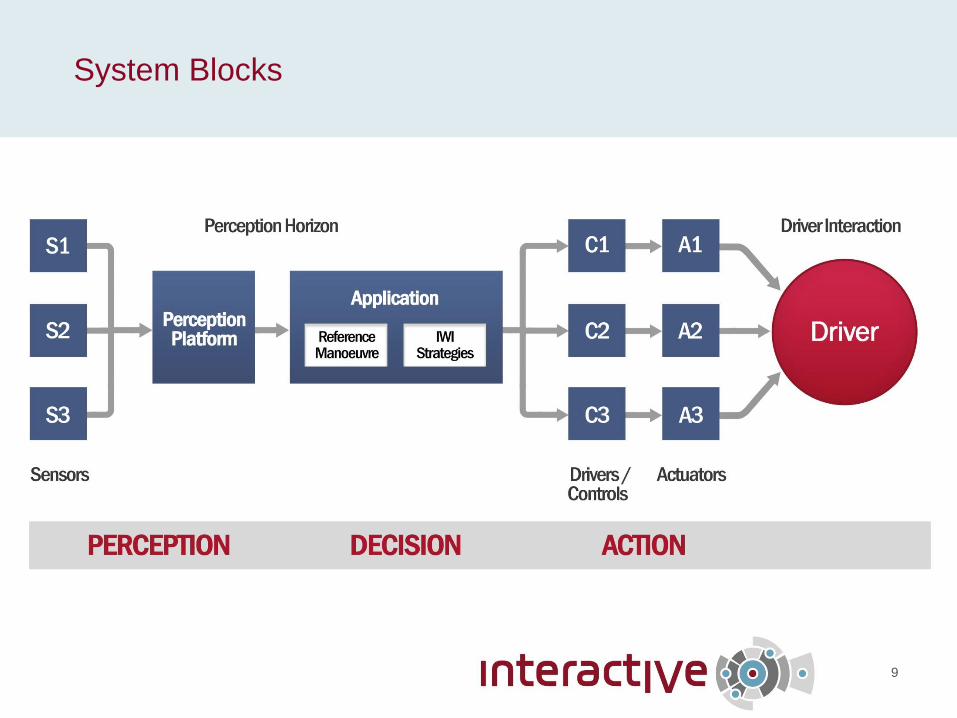
System Blocks
10
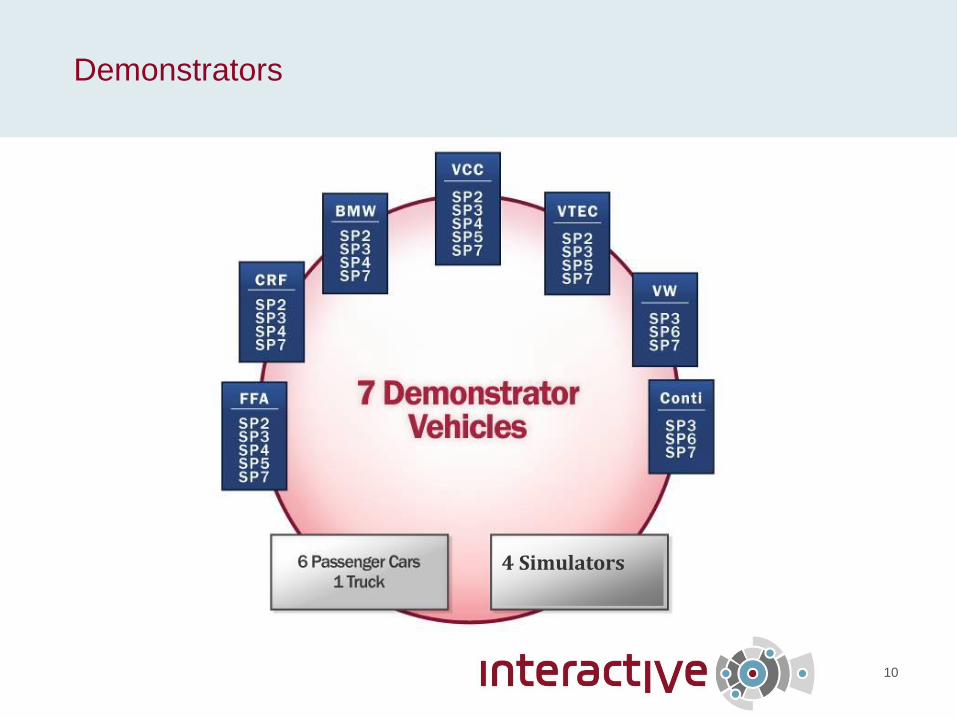
Demonstrators
4 Simulators

11
Demonstrators
•
12
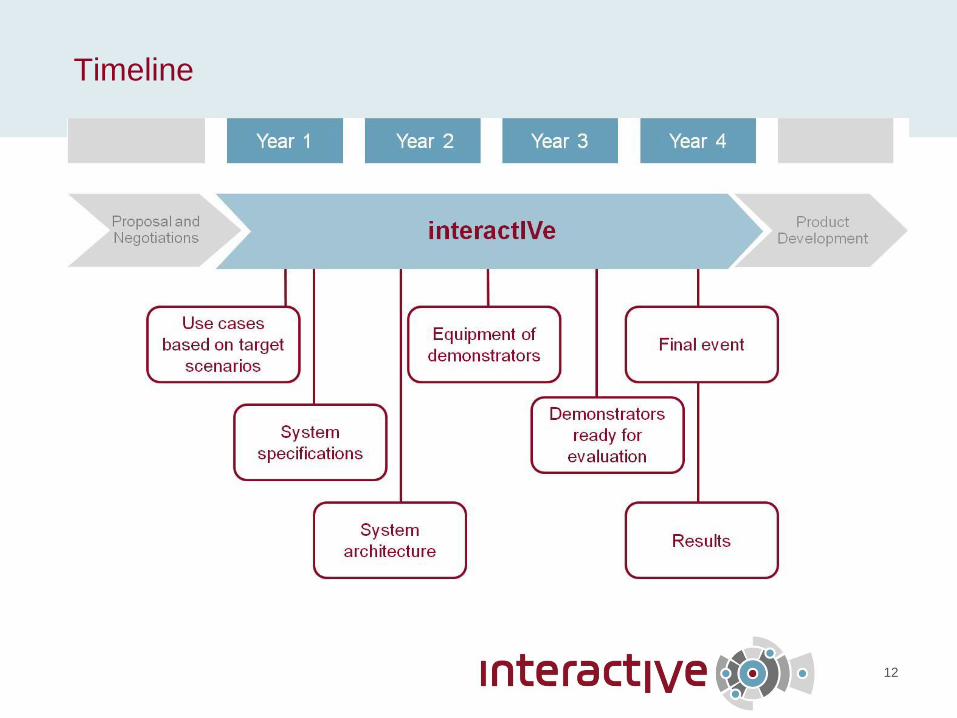
Timeline
13
14 PLEASE FILL
IN THE DATE
Project presentation
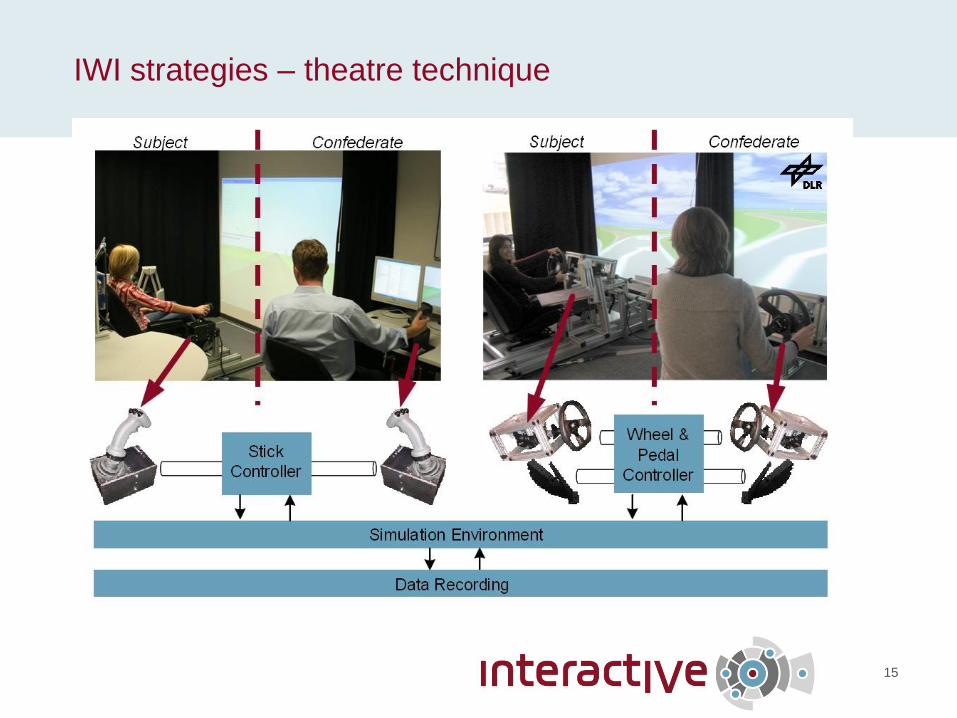
SP3: IWI strategies
(Information/Warning/Intervention)
• Analysis of user needs, expectations, and behaviour
• Definition of detailed use cases based on target scenarios from the
application-oriented sub-projects
• Definition of requirements for IWI strategies based on use cases
• Iterative design, prototyping, and user testing of IWI strategies based on
the initial requirements
15
IWI strategies – theatre technique
16
17
SP4: SECONDS -- Integration of Driver Assistance functions
Driver Assistance system conceived as a co-driver, who gives
active advices when the driver is not following a safe manoeuvre
18
SECONDS
• Conceive, develop, and test continuous support functions
• Functions: continuous support (integrated longitudinal and lateral support),
curve speed control, enhanced dynamic pass predictor, safe cruise
• Innovative concept for splitting the driving task (amount of control) between
driver and vehicle
• Build-up four demonstrator vehicles (passenger cars)
• Implementation of perception platform
• IWI strategies taking into account haptic devices
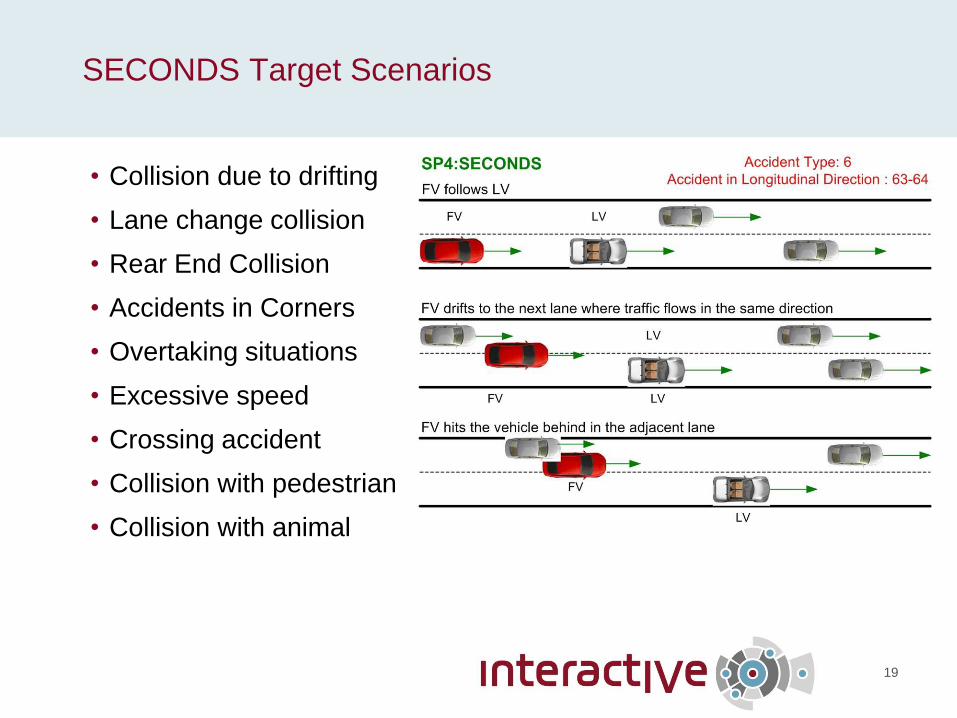
19
• Collision due to drifting
• Lane change collision
• Rear End Collision
• Accidents in Corners
• Overtaking situations
• Excessive speed
• Crossing accident
• Collision with pedestrian
• Collision with animal
SECONDS Target Scenarios
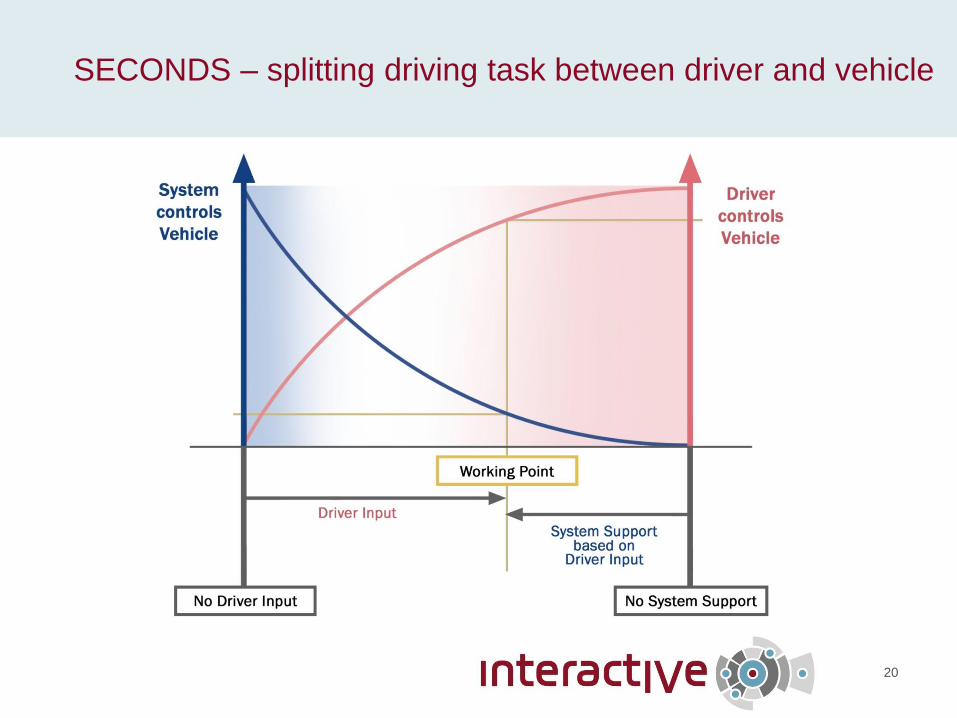
20
SECONDS – splitting driving task between driver and vehicle
22
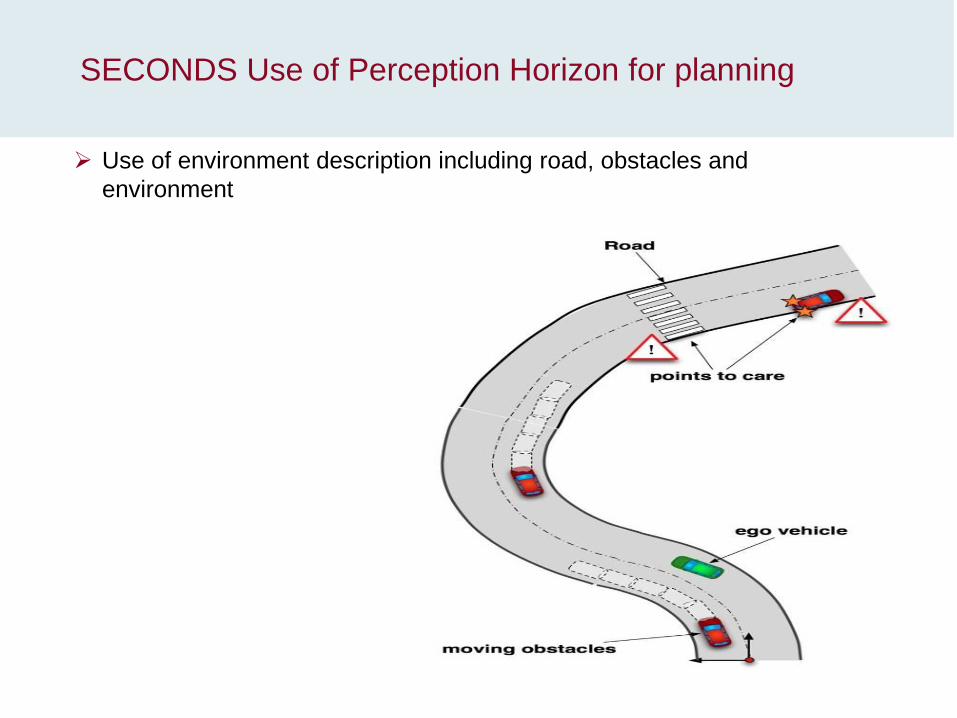
SECONDS Use of Perception Horizon for planning
Use of environment description including road, obstacles and
environment
23
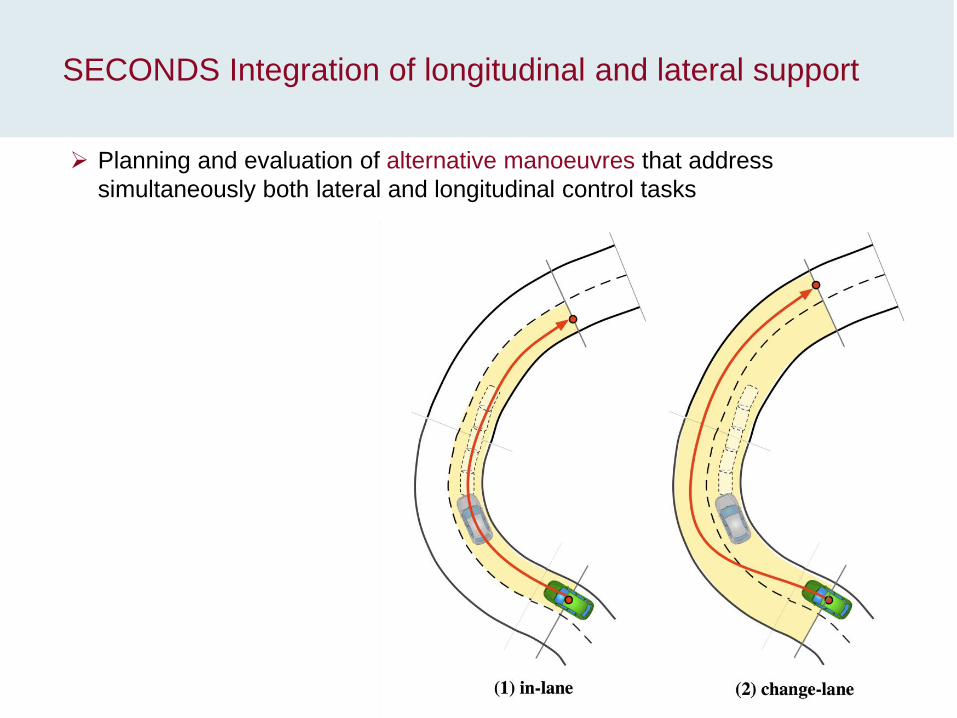
SECONDS Integration of longitudinal and lateral support
Planning and evaluation of alternative manoeuvres that address
simultaneously both lateral and longitudinal control tasks
24

25
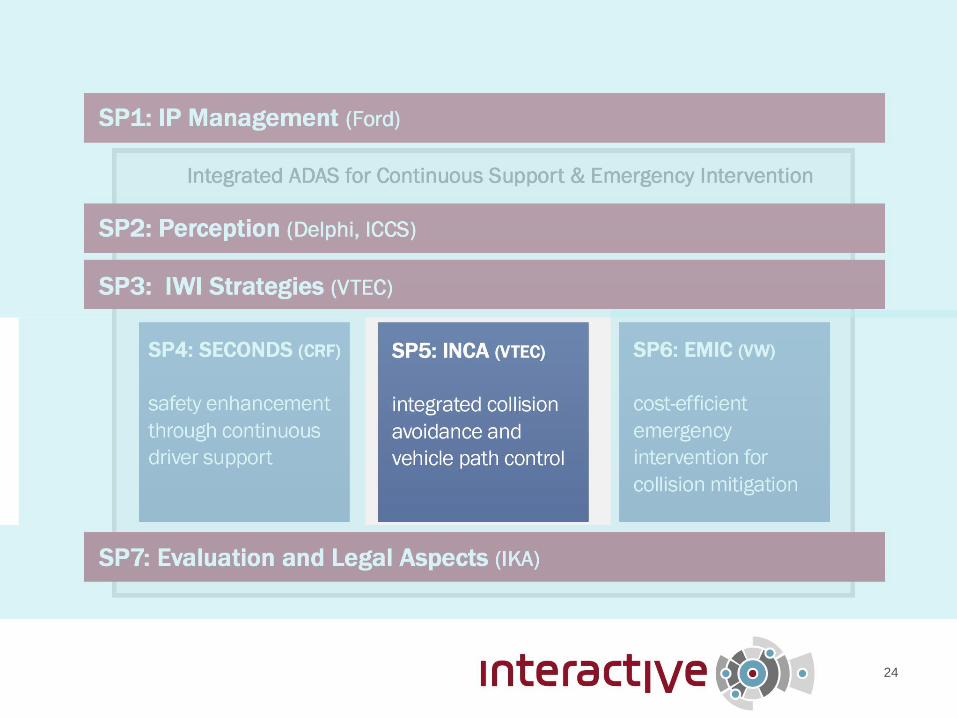
SP5: INCA
• Development of integrated collision avoidance and vehicle path control for
passenger cars and commercial vehicles
• Combination of lateral and longitudinal active interventions by autonomous
braking and steering
• “Vehicle path control” module dynamically evaluates a collision free
trajectory in rapidly changing driving scenarios
• INCA addresses rear-end collisions, lateral and head-on collision situations
• Three demonstrator vehicles (two passenger cars and one heavy load
truck equipped and tested); two of them shared with SECONDS
26
The INCA use cases are based on the following target
scenarios:
• Head-on collisions: since these are the most frequent. Addressing head
on collisions results tough requirements on all parts of the system.
• Run-off the road accidents: these are the second largest group and
today’s technology (lane departure warning) is already effective but there is
a potential for improvements and reduction of nuisance alarms by
introducing road edge detection.
• Rear end collisions: these accidents represent the third largest group.
State of the art systems gives collision mitigation and there are also
systems that provide full collision avoidance at low speeds. The INCA
active steering approach has a possibility to increase the situations where
full avoidance can be offered by the system.
• Lane change accidents: these accidents represent a fairly small group in
the accident statistics. However due to the large blind spots in a truck lane
change truck drivers are aware of the hazard and an assistance system is
expected to be helpful.
27
INCA Challenges
• Today we use braking for "longitudinal" threat.
• In order to cope with avoidance manoeuvres by steering a number of
challenges is added: for example:
• How to decide and describe the best path to follow in order to avoid ” lateral
threat; with boundary conditions by the vehicle itself and environment - like
road curvature and width ?
• How to judge the risk of collision with oncoming ( or objects from behind)
given
1) sensor limitations (accuracy / delays ) and
2) long enough prediction horizon - in order to avoid unrealistic
steering torque demands.
• Calculate the risk for passing the road edge is new and not done before,
the sensor part is an obvious more difficult, - specially compared to lane
tracking – but
28
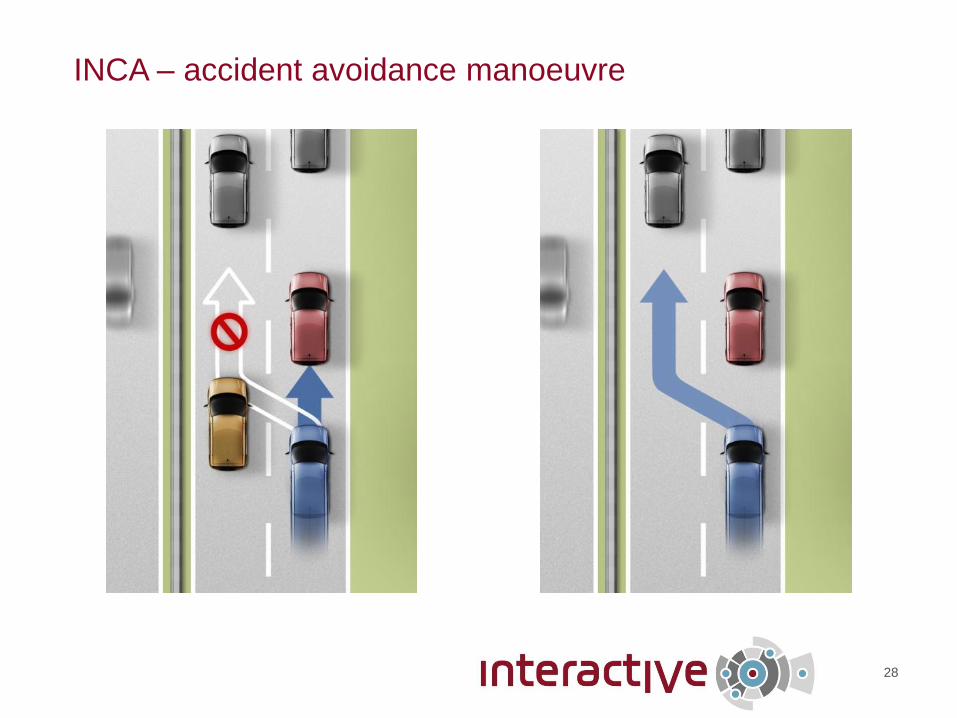
INCA – accident avoidance manoeuvre
29
30 PLEASE FILL
IN THE DATE
Project presentation
• Development of cost-efficient collision mitigation systems
• Emergency braking and steering based on frontal surround perception
• Low cost system architectures or low-cost additions to existing ADAS:
specific attention paid to cost-effective hardware and software components
• Build-up two demonstrator vehicles (Emergency steering assistant and
autonomous emergency braking and/or steering system)
SP6: EMIC
31 PLEASE FILL
IN THE DATE
Project presentation
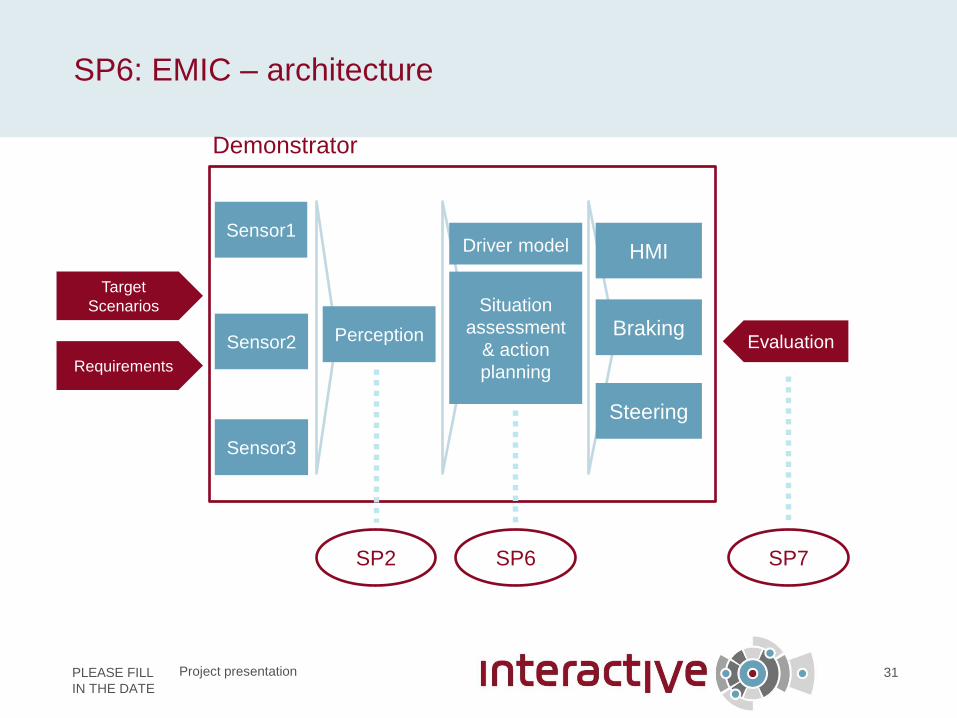
SP6: EMIC – architecture
HMI
Steering
Braking Evaluation
Demonstrator
Target
Scenarios
Sensor1
Sensor2
Sensor3
Requirements
Perception
SP2 SP6 SP7
Situation
assessment
& action
planning
Driver model
32
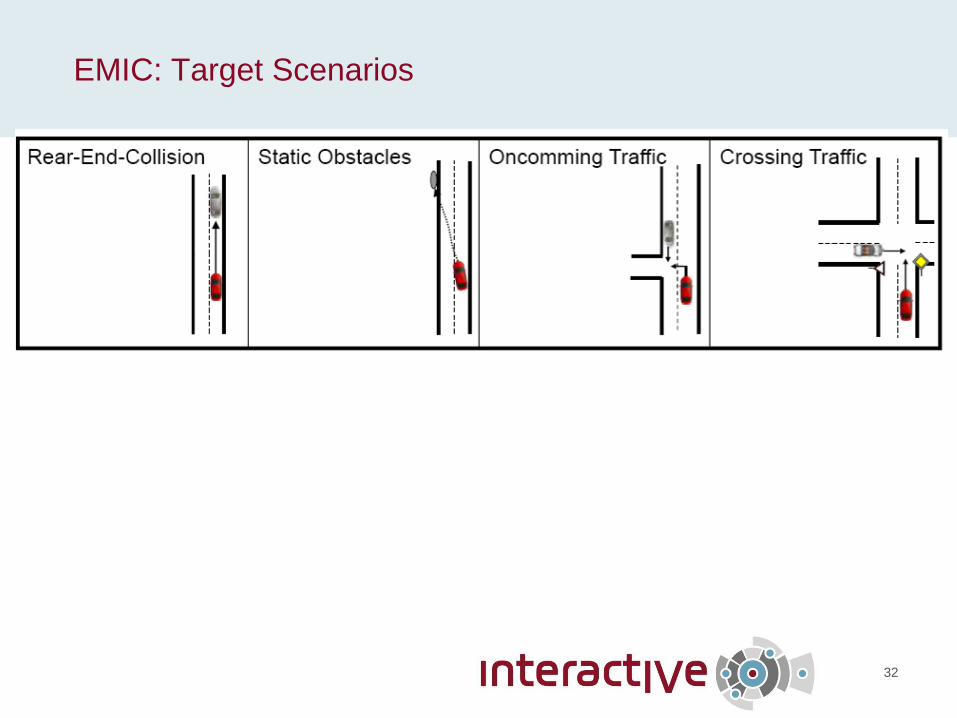
EMIC: Target Scenarios
33
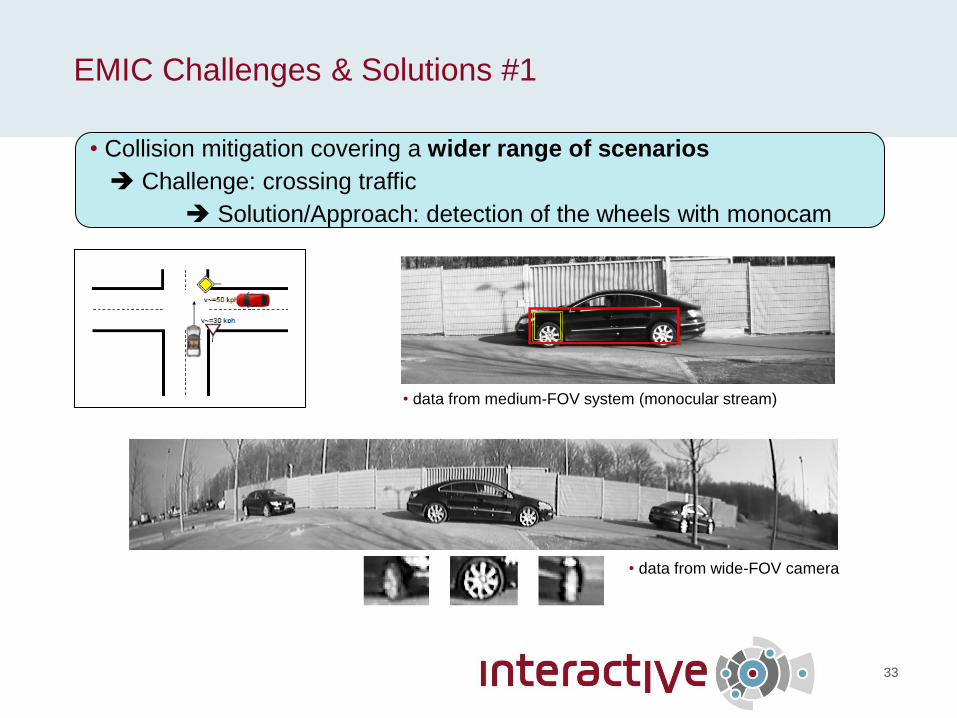
EMIC Challenges & Solutions #1
• Collision mitigation covering a wider range of scenarios
Challenge: crossing traffic
Solution/Approach: detection of the wheels with monocam
• data from medium-FOV system (monocular stream)
• data from wide-FOV camera
34
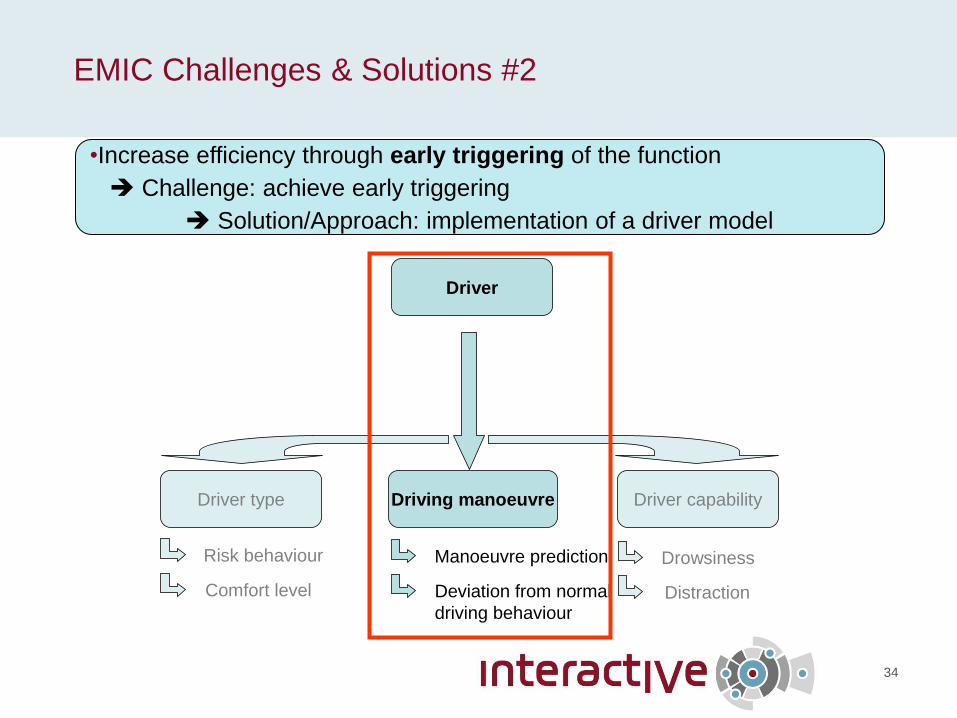
EMIC Challenges & Solutions #2
•Increase efficiency through early triggering of the function
Challenge: achieve early triggering
Solution/Approach: implementation of a driver model
Environment Driver Traffic
Road condition
Weather
Traffic flow
Construction site
Driver type Driving manoeuvre Driver capability
Risk behaviour
Comfort level
Drowsiness
Distraction
Manoeuvre prediction
Deviation from normal
driving behaviour
35
36 PLEASE FILL
IN THE DATE
Project presentation
SP7: Evaluation and legal aspects
• Definition of a test and evaluation framework for the assessment of each
application with respect to human factors and technical performance
• Development of test scenarios, procedures, and evaluation methods
• Provision of tools for evaluation like equipment, test catalogues,
procedures, questionnaires or software and support for testing
• Definition of test and evaluation criteria
• Analysis of legal aspects for broad exploitation of the applications
37
38
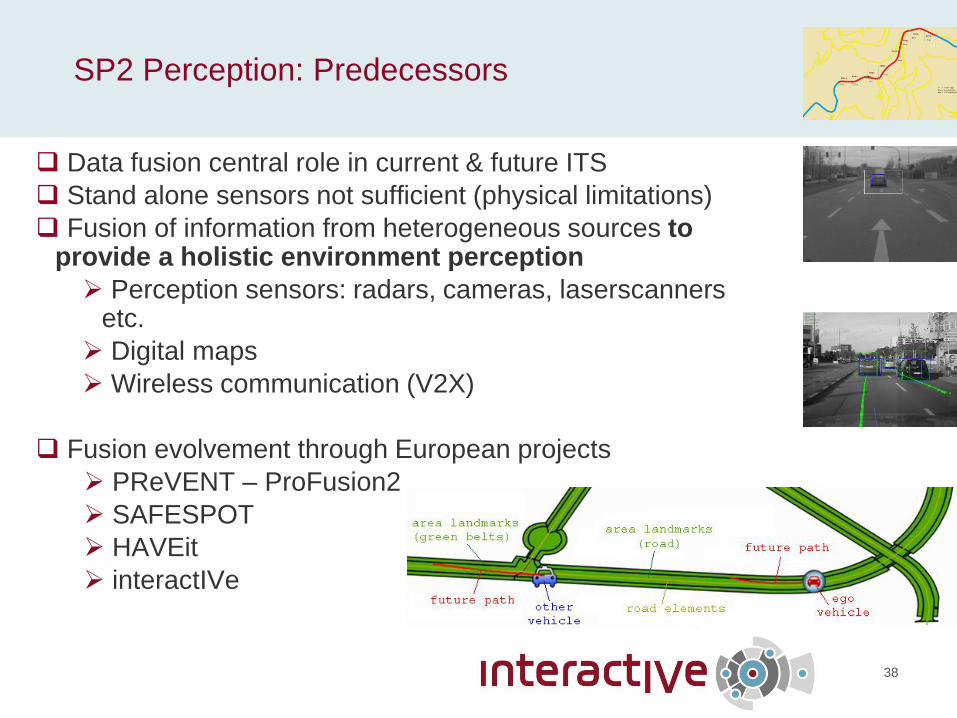
SP2 Perception: Predecessors
Data fusion central role in current & future ITS
Stand alone sensors not sufficient (physical limitations)
Fusion of information from heterogeneous sources to provide a holistic environment perception
Perception sensors: radars, cameras, laserscanners etc.
Digital maps
Wireless communication (V2X)
Fusion evolvement through European projects
PReVENT – ProFusion2
SAFESPOT
HAVEit
interactIVe
39
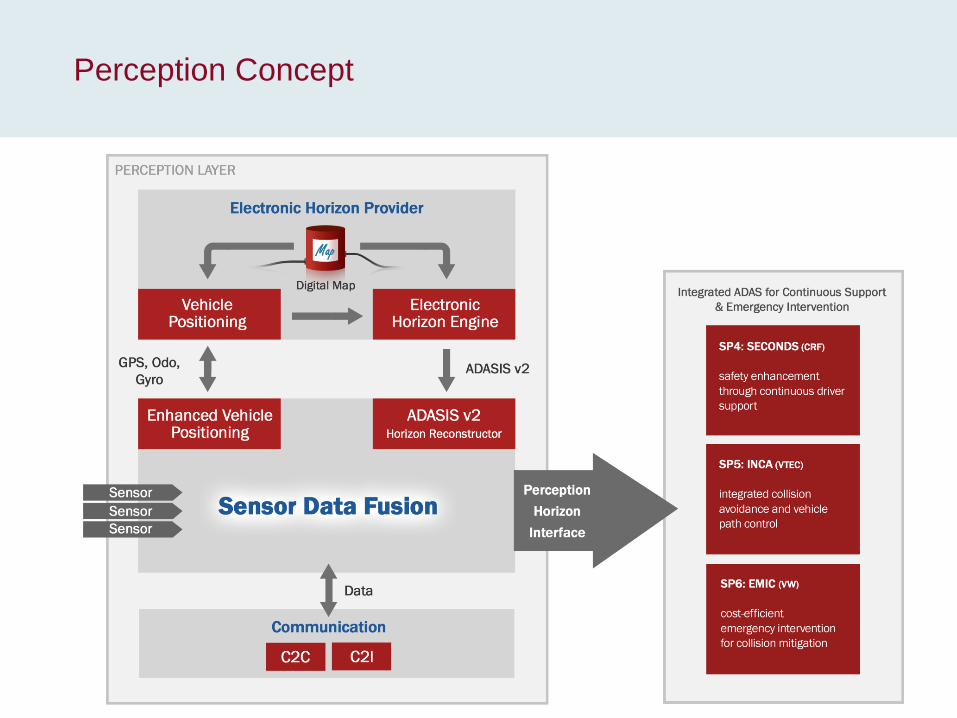
SP2 Perception
• Specifications for sensor interfaces and fusion modules
• Multi sensor approaches and sensor data fusion
• Common perception framework for multiple safety applications
• Unified output interface from the perception layer to the application layer
• Integration of different information sources like sensors, digital maps, and
communications
• Innovative model and platform for enhancement of perception of traffic
situations

40
Perception– Largest Sub-Project
Funding: 3.8 M€
Budget: 6.6 M€
Resources: 495 person months
Duration: 42 months
Start: 1. January 2010
SP leader: Uri Iurgel, Delphi
Angelos Amditis, ICCS
Countries: France, Germany, Greece, Italy, Netherlands,
Sweden, UK
41
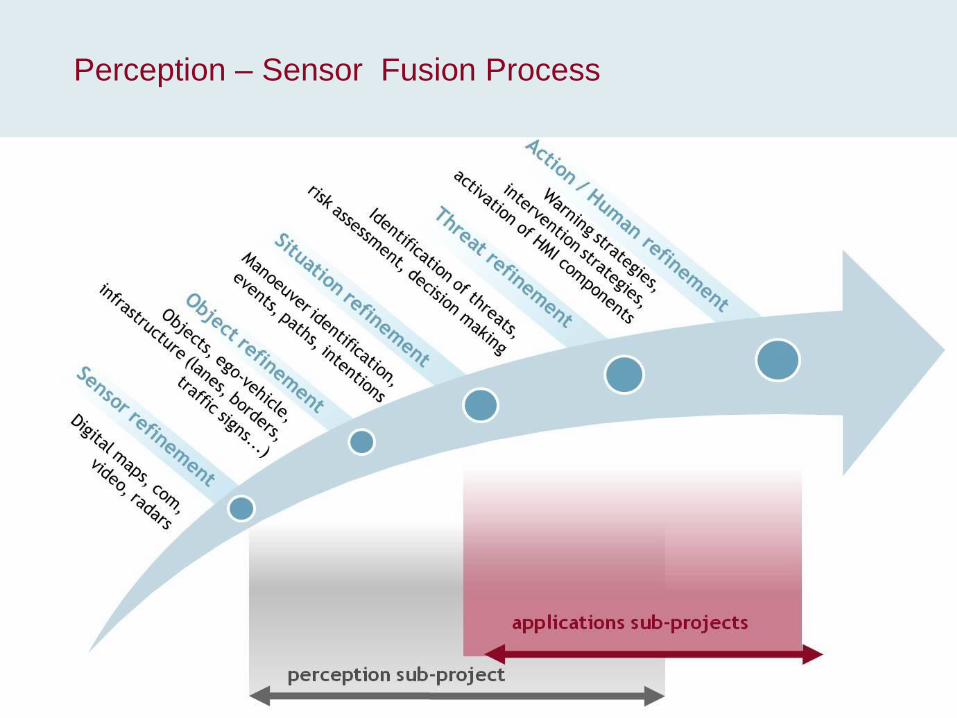
Perception – Sensor Fusion Process
42
Perception Concept
43 Kick-off meeting
– January 20,
2010
• WP21: Technical Management (DEL)
• WP22: Interactions (ICCS)
• WP23: Requirements (DAI)
• WP24: Architecture & Specifications (VTEC)
• WP25: Sensor Data Fusion Research (ICCS)
• WP26: VSP specific Development (DEL)
• WP27: Test & Evaluation (PASS)
Perception Project Structure
45
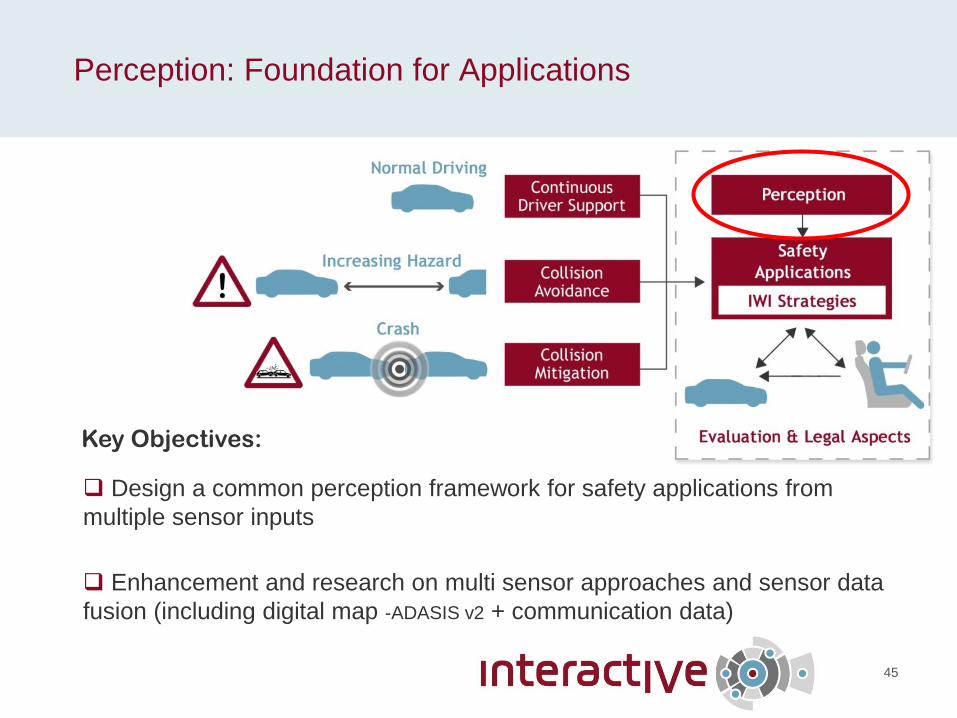
Perception: Foundation for Applications
Design a common perception framework for safety applications from
multiple sensor inputs
Enhancement and research on multi sensor approaches and sensor data
fusion (including digital map -ADASIS v2 + communication data)
Key Objectives:
46
Perception: Innovation …
Development of an innovative model and platform for enhancing the perception
of the traffic situation in the vicinity of the vehicle (based on PReVENT/PF2
and SAFESPOT experience )
General interfaces for different sensor types to minimize effort in the next levels
of processing
Integrated internal architecture to serve multiple applications
Unified output interface from the perception layer to the application layer
Applicable to different demos and applications with minor adaptation;
Closer to the plug & play approach
Reference perception platform implementation
47
Perception: … and Challenges
Active intervention poses “hard” real-time requirements for data processing &
fusion modules
Reference perception platform (generic I/O interfaces, integration of multiple
modules, synchronization)
Novel multi-sensor data fusion research (attention focused approach, object
classification, road edge detection)
48
Perception: … and Challenges
Active intervention poses “hard” real-time requirements for data processing &
fusion modules
Reference perception platform (generic I/O interfaces, integration of multiple
modules, synchronization)
Novel multi-sensor data fusion research (attention focused approach, object
classification, road edge detection)
49
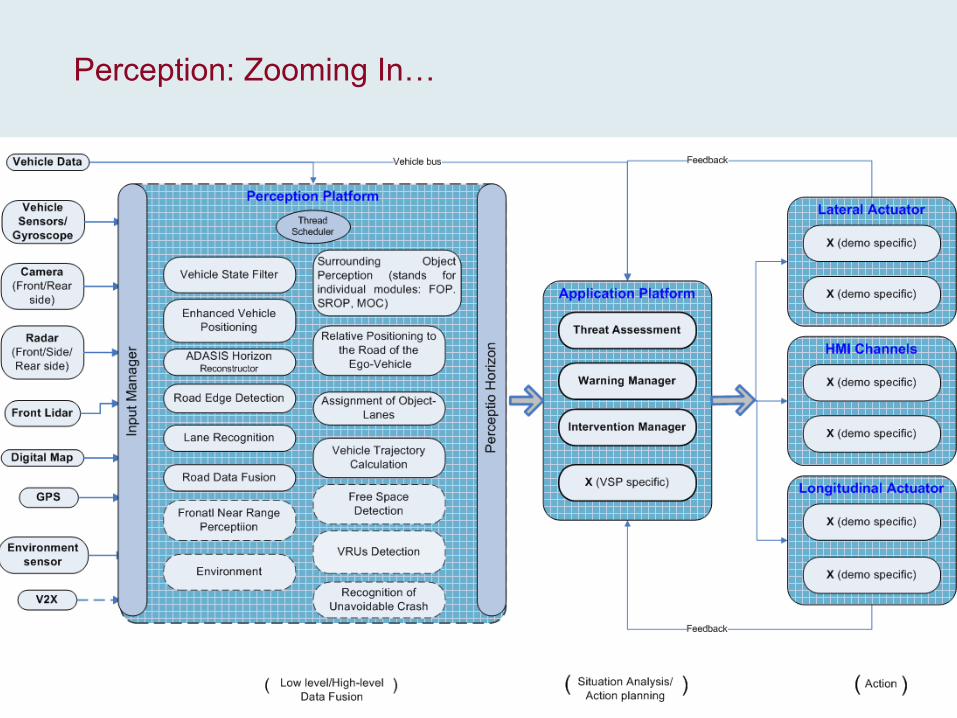
Perception: Zooming In…
50
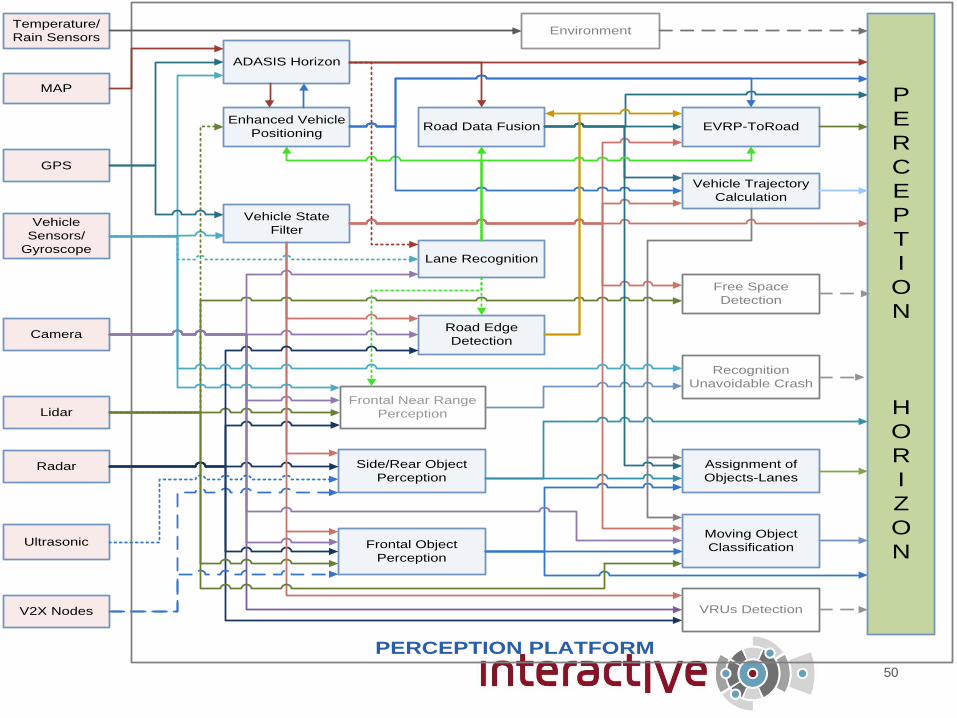
PERCEPTION PLATFORM
GPS
Vehicle
Sensors/
Gyroscope
Camera
MAP
Lidar
Ultrasonic
V2X Nodes
Radar
Enhanced Vehicle
Positioning
P
E
R
C
E
P
T
I
O
N
H
O
R
I
Z
O
N
Road Edge
Detection
Frontal Near Range
Perception
Side/Rear Object
Perception
Frontal Object
Perception
VRUs Detection
Moving Object
Classification
Assignment of
Objects-Lanes
Recognition
Unavoidable Crash
Free Space
Detection
Vehicle State
Filter
Lane Recognition
Vehicle Trajectory
Calculation
Road Data Fusion EVRP-ToRoad
ADASIS Horizon
EnvironmentTemperature/
Rain Sensors
51
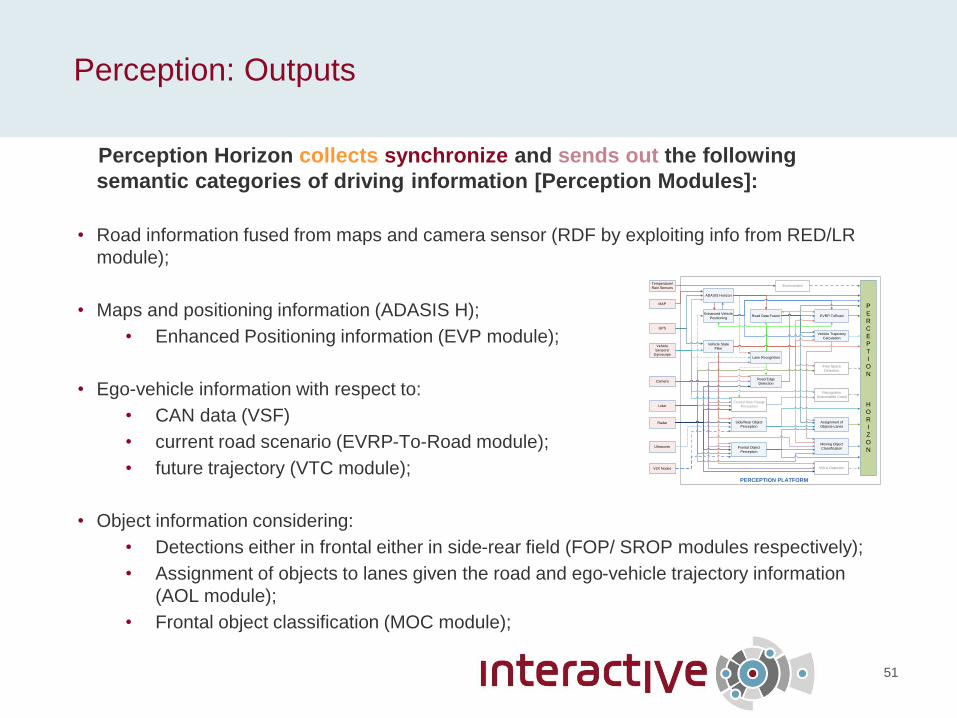
Perception: Outputs
Perception Horizon collects synchronize and sends out the following
semantic categories of driving information [Perception Modules]:
• Road information fused from maps and camera sensor (RDF by exploiting info from RED/LR
module);
• Maps and positioning information (ADASIS H);
• Enhanced Positioning information (EVP module);
• Ego-vehicle information with respect to:
• CAN data (VSF)
• current road scenario (EVRP-To-Road module);
• future trajectory (VTC module);
• Object information considering:
• Detections either in frontal either in side-rear field (FOP/ SROP modules respectively);
• Assignment of objects to lanes given the road and ego-vehicle trajectory information
(AOL module);
• Frontal object classification (MOC module);
PERCEPTION PLATFORM
GPS
Vehicle
Sensors/
Gyroscope
Camera
MAP
Lidar
Ultrasonic
V2X Nodes
Radar
Enhanced Vehicle
Positioning
P
E
R
C
E
P
T
I
O
N
H
O
R
I
Z
O
N
Road Edge
Detection
Frontal Near Range
Perception
Side/Rear Object
Perception
Frontal Object
Perception
VRUs Detection
Moving Object
Classification
Assignment of
Objects-Lanes
Recognition
Unavoidable Crash
Free Space
Detection
Vehicle State
Filter
Lane Recognition
Vehicle Trajectory
Calculation
Road Data Fusion EVRP-ToRoad
ADASIS Horizon
EnvironmentTemperature/
Rain Sensors
52
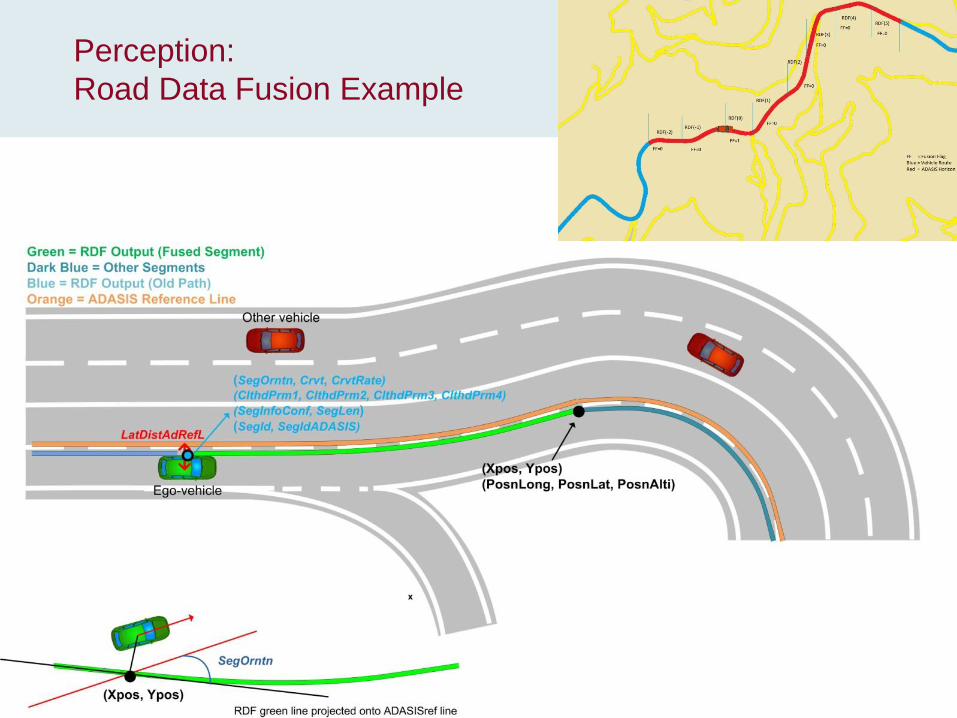
Perception:
Road Data Fusion Example
53
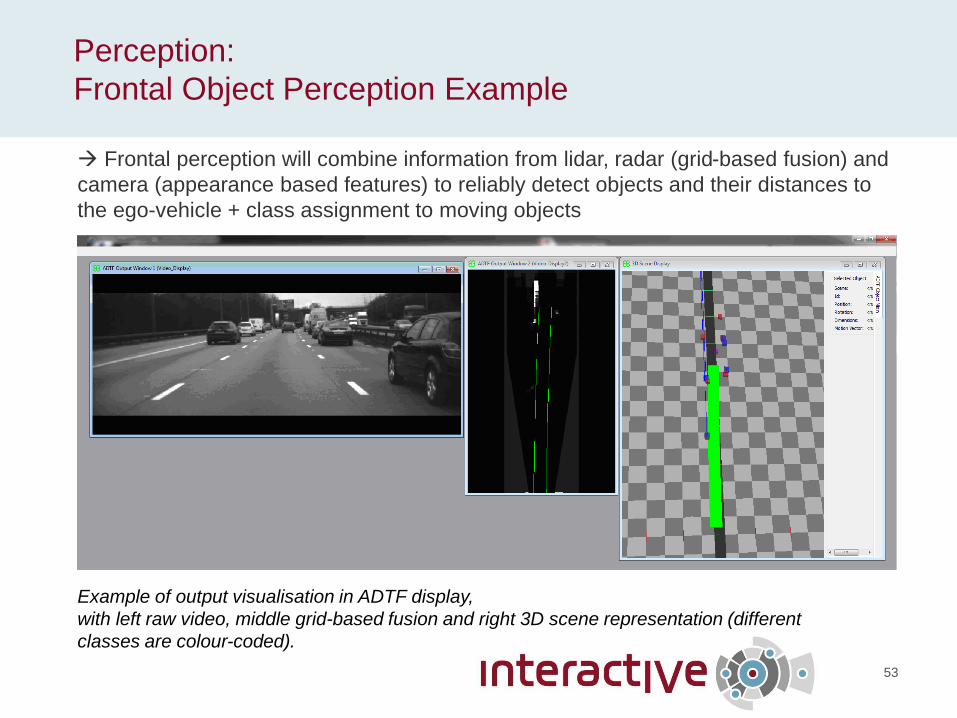
Perception:
Frontal Object Perception Example
Example of output visualisation in ADTF display,
with left raw video, middle grid-based fusion and right 3D scene representation (different
classes are colour-coded).
Frontal perception will combine information from lidar, radar (grid-based fusion) and
camera (appearance based features) to reliably detect objects and their distances to
the ego-vehicle + class assignment to moving objects
54
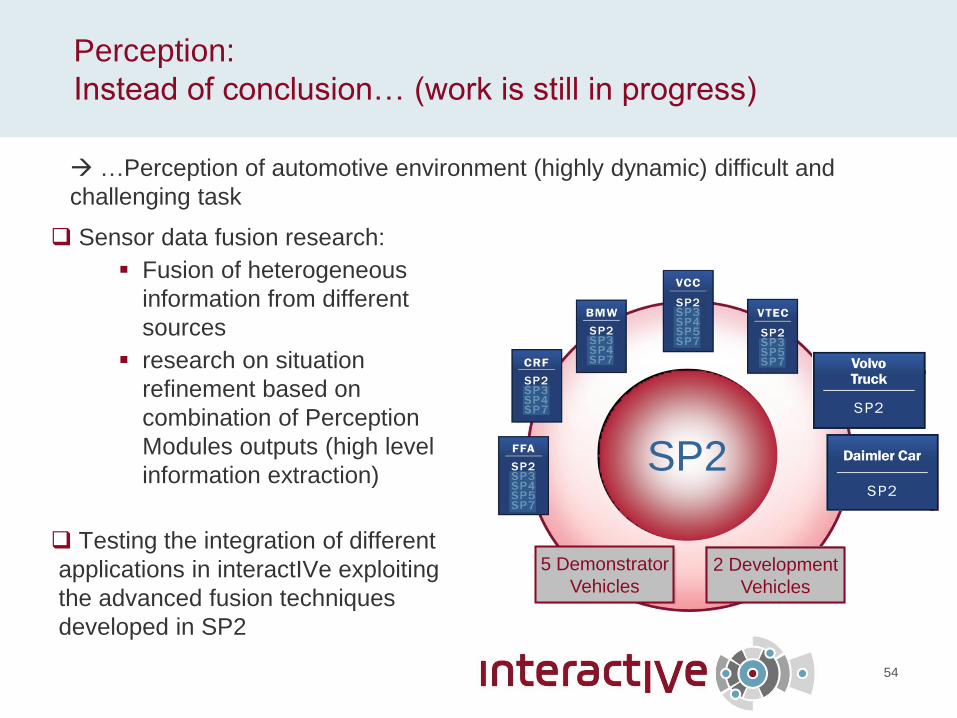
Perception:
Instead of conclusion… (work is still in progress)
Sensor data fusion research:
Fusion of heterogeneous
information from different
sources
research on situation
refinement based on
combination of Perception
Modules outputs (high level
information extraction)
Testing the integration of different
applications in interactIVe exploiting
the advanced fusion techniques
developed in SP2
5 Demonstrator
Vehicles 2 Development
Vehicles
SP2
…Perception of automotive environment (highly dynamic) difficult and
challenging task

55
Thank you.
Dr. Angelos Amditis, ICCS -- Lars Bjelkeflo, VTECH
Uri Iurgel, Deplhi -- Sinisa Durekovic, NAVTEQ

56
Thank you.
This work was also supported by the European Commission under interactIVe,
a large scale integrated project part of the FP7-ICT for Safety and Energy
Efficiency in Mobility.
The authors would like to thank all partners within interactIVe for their
cooperation and valuable contribution.














![Highway Accident Avoidance & Identification System[HAAIS] Project ID :12-138](https://img.pdfslide.us/doc/110x75/56649f445503460f94c654b9/highway-accident-avoidance-identification-systemhaais-project-id-12-138.jpg)