Embed Size (px)
Citation preview

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 1 of 23
Chapter 3 Transducers and Their Response
3.1 Transducer
Instrument Society of America defines a sensor or transducer as a device which provides a
usable output in response to a specified measured. Here the measured is a physical quantity and
the output may be an electrical quantity, mechanical and- optical.
Sensor
An element that senses a variation in input energy to produce a variation in another or
same form of energy is called a sensor.
Transducer
Transducer converts a specified measured into usable output using transduction principle.
For example, a properly cut piezoelectric crystal can be called a sensor where as it
becomes a transducer with appropriate electrodes and input/output mechanisms attached
to it. So, the sensor is the primary element of a transducer.
Transducers is a devices used to transform one kind of energy to another. When a transducer
converts a measurable quantity (temperature, pressure, level, optical intensity, magnetic field,
etc) to an electrical voltage or an electrical current we call it a sensor. Energy information
conversion is the objective of a sensor. The information available in one energy form must be
converted into the same or another energy form, with exactly the same information content
as the originating energy form.
The sensor or the sensing element is the first element in a measuring system and takes
information about the variable being measured and transforms it into a more suitable form to be
measured.
Sensor is sometimes called a primary measuring element, it can be found simply as a mercury
thermometer to measure the temperature. It may be embedded in the transducer to perform its
function. That means the transducer consists of a primary element (sensor) plus a secondary

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 2 of 23
element (signal conditioning circuit) that transforms the passive change or small voltage signal
into active signal range that can be easily used in other chains of the control loop.
A transducer can be defined as a device capable of converting energy from one form into
another. Transducers can be found both at the input as well as at the output stage of a measuring
system.
The input transducer is called the sensor, because it senses the desired physical quantity and
converts it into another energy form.
The output transducer is called the actuator, because it converts the energy into a form to which
another independent system can react, whether it is a biological system or a technical system. So,
for a biological system the actuator can be a numerical display or a loudspeaker to which the
visual or aural senses react respectively. For a technical system the actuator could be a recorder
or a laser, producing holes in a ceramic material. The results can be interpreted by humans.
Actuators are important in instrumentation. They allow the use of feedback at the source of the
measurement. However we will pay little attention to them in this course. The study of using
actuators and feedback belongs to a course in Control theory.
3.2 Types of Energy Form
We can distinguish six different energy domains: (1) radiant, (2) mechanical, (3) thermal, (4)
electrical, (5) magnetic and (6) chemical.
If certain information is already available in the electrical domain it can be claimed that it
requires no energy conversion, but in general there is 'shape' conversion left and this is just
the domain which belongs to the field of electronics and electrical science and engineering.
A good example of such a sensor only sensitive to electrical energy is the probe of an
oscilloscope, with which a good adaptation to the signal source is realized. In the modifier
stage we meet other examples of shape converters, for instance the A/D and D/A converters.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 3 of 23
Table 1.6 Energy types and corresponding measured
Energy Measurands
Mechanical Length, area, volume, force, pressure, acceleration, torque, mass flow, acoustic intensity and so on.
Thermal Temperature, heat flow, entropy, state of matter Electrical Charge, current, voltage, resistance, inductance,
capacitance, dielectric constant, polarization, frequency, electric field, dipole moment, and so on.
Magnetic Field intensity, flux density, permeability, magnetic moment, and so on.
Radiant Intensity, phase, refractive index, reflectance, transmittance, absorbance, wavelength, polarization, and so on.
Chemical Concentration, composition, oxidation/reduction potential, Reaction rate, pH and the like.
3.3 Classification of transducers
The transducers may be classified based on
i. The physical effect employed
ii. The physical quantity measured
iii. The source of energy
i. Classification based on physical effect
The physical quantity applied as measurand (quantity to be measured) to the transducer causes
some physical changes in its element. By this physical effect the transducer converts the physical
quantity in to electrical quantity. For example, a change in temperature to be measured causes
variation of resistance (physical change) in a copper wire (element) and this effect could, be used
to convert temperature in to an electrical output,
The physical effects commonly employed are
a. Variation of resistance b. Variation. of inductance c. Variation of capacitance

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 4 of 23
d. Piezo electric effect e. Magnetostrictive effect f. Elastic effect g. Hall effect
a. Variation of resistance
The resistance of a length of metallic wire is given by
lRaρ
=
Where,
R = Resistance in ohm.
ρ =Resistivity (or specific resistance) of the material in ohm-m.
l = length of wire in m.
a = Area of cross-section in m2.
As resistance is a function of ρ , l , a (i.e) ( , , )R f l aρ= , with any change in anyone of the
physical quantities ρ , a or l due to variation in resistance, a variable resistance transducer
can be designed to convert physical quantity.
Some of the transducers based on this principle are potentiometer, strain gauge, resistance
thermometer, carbon microphone, and photoconductive cell.
• The resistance thermometer is based upon thermo resistive effect which is the
change in electrical resistivity of a metal or semiconductor due to change in
temperature co-efficient of resistivity.
• Carbon microphone works on the principle of change in contact resistance due to
applied pressure.
• Photoconductive cell is based on photoconductive effect which is the change in
electrical conductivity due, to incident light.
• Potentiometer works on the principle of change in resistance due to linear or
rotational motion.
• Strain gauge works on the principle of change in resistance due to applied
pressure.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 5 of 23
b. Variation of inductance
The inductance of a coil is given by
dL Ndtφ
=
2o rN ALlµ µ
=
where,
L = inductance in henry
N = No., of turns
oµ = absolute permeability
rµ = relative permeability
A = area of cross section of the core
l = length of magnetic path
ddtφ = rate of change of magnetic flux.
As L is a function, of N, rµ , A, l ,
(i.e) L = f (N, rµ ,A, l ), when anyone of these quantities changes, the inductance changes.
This leads to the design of a variable inductance transducer.
Some of the transducers based on variation of inductance are induction potentiometer,
linear variable differential transformer (LVDT) and synchros.
c. Variation of capacitance
The capacitance between two conductor plates is given by
o r ACd
ε ε=

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 6 of 23
Where
C = capacitance in farad
oε = absolute permittivity
rε = relative permittivity of the separating medium
A = area of cross-section of the plates
As C is a function of , ,r A dε i.e C = ( , ,r A dε ) when anyone of these quantities changes, the
capacitance varies. This leads to the design of a variable capacitance transducer.
d. Piezoelectric effect
When a piezoelectric crystal like quartz or Rochelle salt is subjected to mechanical stress, an
electric charge is generated. This is known as piezoelectric effect. The transducer based on this
effect is piezoelectric transducer.
e. Magnetostrictive effect
When a magnetic material is subjected to mechanical stress, its permeability changes. This effect
is magnetostrictive effect and the transducer based on this effect is magnetostrictive transducer.
f. Elastic effect
When an elastic member is subjected to mechanical stress it is deformed. The transducer based
on this effect is called elastic transducer.
g. Hall effect
When a magnetic field is applied to a current carrying conductor at right angles to the direction
of current, a transverse electric potential gradient is developed in the conductor. This effect is
called as Hall effect and the transducer based on this effect is called as Hall effect transducer.
ii. Classification based on physical quantity measured
The transducers may be classified based on the physical quantity they measure as follows:
• Temperature transducers → Transducers used to measure temperature • Pressure transducers → To measure pressure • Flow transducers → To measure flow

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 7 of 23
• Liquid level transducers → To measure liquid level • Force/Torque transducers→ To measure force & Torque • Velocity/Speed transducers→ To measure velocity & speed • Humidity transducers→ To measure humidity • Acceleration/vibration transducers→ To measure acceleration & vibration • Displacement transducers →To measure displacement
iii. Classification based on source of energy
Transducers may be, classified based on source of energy into two types.
• Active transducer • Passive transducer
Passive transducer A component whose output energy is supplied entirely or almost entirely by its input signal is
called a passive transducer. A passive transducer is the one which absorbs energy from the input
medium and converts it directly into the output signal.
Example
A Thermocouple extracts heat energy from the input medium and converts it into
electrical energy (voltage).
Active Transducer An active transducer has an auxiliary source of power which supplies a major part of the output
power while the input signal supplies only an insignificant portion (i.e) this transducer uses the
energy it absorbs from the input medium as a control signal to transfer energy from the power
supply to produce a proportional output.
Example
Strain gauge
The energy extracted from the strained member is very small. The energy for the output
signal is supplied by an external power source.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 8 of 23
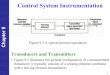
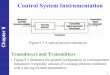
Figure 1.1 Active and passive transducers
Selection of Transducers Transducers are used for the measurement of physical quantities. The selection of transducers for
particular measurand is very important. The selection of transducers may be based on the
following factors for effective measurement.
1. The physical quantity to be measured (measurand), 2. The range of input quantity,
Based on physical quantity to be measured
The correct type of transducer should be selected for measuring the physical quantity. The
following table shows the physical quantity and the corresponding transducer types available.
Table 1.2 classification based on physical quantity
No. Physical quantity Transducers available
1 Temperature Bimetallic element Fluid expansion systems
i. Liquid-in-steel bulb thermometers ii. Liquid-in-glass thermometers
iii. Vapour pre-ssure thermometers Thermoresistive elements
i. Resistance Temperature detector (RTD) ii. Thermistor
Thermocouple Linear-Quartz thermometer Pyrometry
2 Pressure U-tube and ball type manometers Ring balance manometer Metallic diaphragms Capsules and bellows

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 9 of 23
Bourdon tubes Membranes
3 Force (weight) Spring balance Cantilever Diaphragms Pneumatic and hydraulic load cells Column and proving ring load cells
4 Torque Torsion bar Flat spiral springs Dynamometer Gyroscope
5 Density of liquids Hydrometer Air bubbler system U-tube weighing system
6 Liquid level Float elements. Manometer system Diaphragms Container weight
7 Viscosity Capillary tube Concentric cylinder system
8 Flow rate of fluids Pitot static tube Flow-obstruction elements Rotating vane system Rotameter float system
9 Displacement Flapper nozzle system
10 Absolute displacement, Velocity and acceleration
Seismic system
Vehicle attitude Gyroscope
3.4 Characteristics of Transducers
The selection of most suitable transducer from commercially available instruments is very
important in designing an Instrumentation system. For the proper selection of transducer,
knowledge of the performance characteristics of them are essential. The performance
characteristics can be classified into two namely i. Static characteristics
ii. Dynamic characteristics

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 10 of 23
Static characteristics are a set of performance criteria that give a meaningful description of the
quality of measurement without becoming concerned with dynamic descriptions involving
differential equations.
Dynamic characteristics describe the quality of measurement when the measured quantities vary
rapidly with time. Here the dynamic relations between the instrument input and output must be
examined, generally by the use of differential equations.
For further reading on this subtopic please read the additional material
3.5 Calibration
Calibration is an essential process to be undertaken for each instrument and measuring system
frequently. A reference standard at least ten times more accurate than the instrument under test
is normally used.
Calibration is the process where the test instrument (the instrument to be calibrated) is compared
with the standard instrument. It consists of reading the standard and test instruments
simultaneously when the input quantity is held constant at several values over the range of the
test instrument.
Generally, certification of an instrument manufactured by an industry is undertaken by the
National Physical Laboratory and other authorized laboratories where the secondary standards
and the working standards are kept.
3.5.1 Procedure for calibration a) Examine the construction of the instrument, and identify and list all the possible
inputs.
b) Decide, which of the inputs will be significant in the application for which
the instrument is to be calibrated.
c) Select the apparatus that will allow you to vary all the significant inputs over
the ranges considered necessary. Select standards to measure each input.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 11 of 23
d) By holding some inputs constant, varying others and recording the outputs
develop the desired static input-output relations.
3.6 Mathematical Models of System Response
3.6.1 Basic System Models • Modelling is the process of representing the behaviour of a system by a collection of
mathematical equations & logics.
o Modelling is comprehensively utilized to study the response of any system.
o Response of a system is a measure of its fidelity to its purpose.
• Simulation is the process of solving the model and it performed on a computer.
• Equations are used to describe the relationship between the input and output of a system.
• Analogy approach is also widely used to study system response
3.6.2 Mechanical System Elements
A) Spring
F = k x
• F = Force (tension or compression),
• x = Displacement (extension or compression),
• k = Spring constant. The bigger the value of k the greater the forces required to
stretch or compress the spring & so the greater the stiffness.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 12 of 23
B) Dashpot
• F = Force opposing the motion at velocity v,
• c = Damping coefficient. Larger the value of c the greater the damping force at a
particular velocity.
C) Mass
• F = Force required to cause acceleration, a,
• m = Mass of the element that is distributed throughout some volume. However, in
many cases, it is assumed to be concentrated at a point.
In general, the response of measurement instruments under dynamic conditions can be complex.
The fundamental concepts of dynamic response, however, can be understood by studying
relatively simple mathematical models.
We will consider three mathematical models for dynamic system response: zeroth, first and
second order systems.
dxF cv cdt
= − = −
2
2
dv d xF ma m mdt dt
= = =

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 13 of 23
3.6.3 Zeroth Order Systems
Imagine a thermometer that measures the temperature in a room of an office building.
For practical purposes, the thermometer will indicate the current temperature at the location
where it has been installed.
The fact that the output of the instrument follows the input “exactly” is the defining
characteristic of zeroth order systems.
Mathematically, if we let f(t) be the input to the system as a function of time and y(t) be the
output, then the relationship between them is
In the example above f(t) would be the actual temperature of the room and y(t) would be the
indicated temperature. K is a constant that multiplies the input to generate the output. If y(t) is
the temperature as displayed in a readout device and the thermometer is calibrated correctly,
then K would ideally be equal to one.
On the other hand, if the output of the thermometer is, for example, an electrical signal, then K
would be a constant with units of Volts per degree Fahrenheit.
The electrical signal could be used to actuate a valve that directs either cold or hot air from the
air-conditioning system to the room. K is usually called the static sensitivity.
Note that the output of zeroth order systems is not affected by the speed at which f(t) changes.
The above Equation is always valid, so the results of static calibration are sufficient to
characterize the response of the system.
3.6.4 First Order Systems
Let’s consider the example of an oral thermometer used at a clinic to measure body temperature
in patients. Prior to use, the thermometer is at room temperature. When the thermometer is put in
the patient’s mouth it experiences a sudden increase in temperature. Generally, we have to wait
for a while before reading the temperature. Unlike the case of a thermometer monitoring the

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 14 of 23
examination room’s temperature, the situation at hand cannot be represented by a zeroth order
model. Why?
Let’s consider a common glass bulb thermometer to explain. The thermometer in originally at
room temperature, which will be denoted by To.
Figure 1.2 Thermometer measuring body temperatures
It is then put in the mouth of a patient represented by the area inside the dashed line which is at
temperature T1. In order for the thermometer to work, the mercury in the bulb must be heated to
T1. The thermal expansion of the mercury will cause the column of mercury in the stem of the
thermometer to increase in length. Measuring this length with the scale marked in the glass gives
a temperature reading T(t).
It takes a while, however, for the temperature of the mercury to reach the value T1, so we must
wait that long before the thermometer indicates the correct temperature. In order to write an
equation to model the response of the thermometer we need a little background in
thermodynamics and heat transfer.
• Heat is a form of energy. We will represent it by Q. It flows from a hot place to a cold
one. The energy in the mercury in the bulb of the thermometer, which we will call E,
increases as heat travels from the mouth of the patient to the bulb.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 15 of 23
• Due to conservation of energy, the rate of change of energy in the bulb with respect to
time is equal to how fast heat is flowing in. In mathematical terms:
• As E increases, the temperature of the mercury, T, rises in proportion. How fast the
temperature increases depends on how much mercury the bulb holds (the mass, m, of the
mercury) and a property of mercury called the ‘specific heat,’ cv.
• The increase in energy is related to the increase in temperature by
Heat must travel through the glass walls of the bulb on its way from the patient’s mouth to the
mercury.
How fast heat can flow through the walls of the bulb depends on a property of glass called the
convection heat transfer coefficient, h, the surface area of the bulb, A, and the current
temperature difference between the mercury and the mouth of the patient. In equation form,
Rearranging the above two equation
This is a differential equation that governs what the temperature of the mercury is at any
time. Since the length of the column of mercury is proportional the temperature, the equation
also governs what the indicated temperature is.
In general, the equation of a first order system is given

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 16 of 23
For the example above, we have
As you can see, the equation governing the behavior of a first order system is a first order
differential equation, so called because the highest derivative of the output variable in the
equation is the first with respect to time.
3.6.5 Second Order Systems
When you go to the grocery store, note that weight scales are available at the produce department
so you can get an idea how many pounds of potatoes you will have to pay for. The scales
generally have a pointer, which indicates weight on a big dial.
Figure 1.3 Spring Balance
If you drop a bag with potatoes on the scale, chances are that the pointer will oscillate a bit
before settling and indicating the correct weight. The reason for the oscillation of the pointer is
that the scale has mass, hence inertia, and its behavior is dictated by Newton’s laws of motion.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 17 of 23
You may now see where the second order label comes from if you recall that acceleration is the
second derivative of displacement ... Let’s analyze the balance and see what we get.
The balance can be represented by the mass-spring-dashpot system shown in Figure
Figure 1.4 Free body diagram of spring balance
The balance can be represented by the mass-spring-dashpot system shown in Figure. To simplify
things a bit, the dial has been replaced by the straight scale at the left. We can write the equation
of motion for the balance using basic dynamics as follows:
• The mass m represents the object weighted so that the weight W is equal to mg
where g is the acceleration of gravity.
• The spring, attached near the left edge of the mass, is a mechanical element which
develops force in proportion to how much it has been stretched. Since the top of
the spring is fixed to the ceiling, the force is proportional to the displacement y of
the mass.
• If the zero value of y corresponds to the position of the spring when it is unloaded,
then the force Fs required to stretch the spring a distance y is given by
• where k is called the spring constant.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 18 of 23
The balance needs a way to dampen the oscillations of the pointer after a weight is dropped. The
damping is provided by the dashpot, which is attached to the mass near the right. Dashpots are
like shock absorbers in cars.
You can imagine one as a piston inside a closed cylinder. The cylinder is filled with a viscous
fluid. As the piston moves, a small gap between the piston and the cylinder allows the fluid to
flow from one side of the piston to the other.
A force is needed to move the piston due to the viscosity of the fluid. The net result is that
dashpots produce a force, Fd which is proportional to the speed of the piston relative to the
cylinder.
This force-speed relation can be written as
• where c is called the damping coefficient.
The free body diagram of the mass is shown in Figure. Applying Newton’s second law we obtain
the equation
• which can be re-written as

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 19 of 23
This is the differential equation that governs the motion of the scale. Since the weight is
indicated by the displacement of the scale, the equation also governs the indicated weight.
In general, the equation for a second order system is given by
Where
3.6.6 Solution to the Differential Equations
In order to see how these systems behave for a given input we need to solve them. The solutions
to the differential equations depend, of course, on how the input varies with time.
• Does it increase, decrease or cycle? Smoothly or abruptly?
• If smoothly, are the changes slow or fast?
Although an infinite number of possible inputs exist, we will consider only two, which are most
telling about the characteristics of the system response. These two inputs are: the step input and
the harmonic input.
We will not go over the method of solution of the differential equations, instead we will just
quote the results. If you know how to solve differential equations, it is reasonably straight
forward to obtain the solutions. If not, there is no need to learn now, just make sure you can use
the solutions presented below.

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 20 of 23
3.6.7 First Order Systems
3.6.7.1 Step input response
A step input is used to represent situations when the input changes from one,
constant, value to another constant value in a very short period of time. Using
Laplace transform for first order equation
• Note that at t = 0, y(t) = yo,
and that as
• The transition between the initial and the final values of y(t) is
exponential as shown in Figure.
Figure 1.5 Instrument responses for first order step input
• The parameter is called the time constant of the system.
• It indicates how fast the system responds to a change in the input.
• Note that after a time of one time constant, y(t) is 63.2% of the way to its
final value.
• Generally, y(t) is considered to have achieved its final value after five time
constants.
τ

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 21 of 23
• As an example, suppose that an oral thermometer takes at least 3 minutes
to indicate a patient’s temperature.
• Then we can guess that the time constant of the thermometer is in the
order of 0.6 minutes.
3.6.7.2 Harmonic input response
It means that the input is a sine wave with constant frequency and amplitude. In
other words the input is of the form(s)
All three definitions are equivalent. In the first, T is the period in seconds. In the
second, f is the frequency in cycles per second or Hertz. In the third, is the circular
frequency in radians per second.
Why should we be concerned with the response of measurement systems to
harmonic inputs?
The answer is that many natural and man-made processes are periodic in nature. For
example, think about day and night, the seasons repeating every year, the waves at
the beach, etc. In the engineering world think about the vibration of a motor, the
movement of pistons in an internal combustion engine, the turning of wheels, the air
conditioning system at your house turning on and off, and so on.
The steady state solution to this equation
with the input

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 22 of 23
Where is called the magnitude ratio and
is called the phase angle.
The magnitude ratio tells us how the amplitude of the output of the system depends
on the frequency of the input. The phase angle tells us how far the system output is
falling behind the input.
Figure 1.6 Instrument responses for first order harmonic input
3.6.7.3 Second order systems
Now, let us consider the response of a second order system to a step input. In other
words we need the solution to

Instrumentation & Measurement _____________________________________________________ _ AAiT
_____________________________________________________________________________________Compiled by Yidnekachew M. Page 23 of 23
In fact, we need to consider three different cases depending on the value of the
parameter ζ called the damping ratio.
• Case 1. Underdamped system ( )1ζ <
• Case 2. Critically damped case ( )1ζ =
• Case 3. Over damped case ( )1ζ >
Figure 1.7 Instrument responses for second order