Embed Size (px)
Citation preview

Computational Materials Science 33 (2005) 429–442
www.elsevier.com/locate/commatsci
Particle modeling of dynamic fragmentation-I:theoretical considerations
G. Wang a, M. Ostoja-Starzewski a,b,*
a Department of Mechanical Engineering, McGill University, Montreal, Quebec, Canada H3A 2K6b McGill Institute for Advanced Materials, McGill University, Montreal, Quebec, Canada H3A 2K6
Received 27 February 2004; received in revised form 4 August 2004; accepted 24 August 2004
Abstract
This paper series adopts particle modeling (PM) to simulation of dynamic fracture phenomena in homogeneous and
heterogeneous materials, such as encountered in comminution processes in the mining industry. This first paper is con-
cerned with the setup of a lattice-type particle model having the same functional form as the molecular dynamics (MD)
model (i.e., the Lennard–Jones potential), yet on centimeter length scales. We formulate four conditions to determine
four key parameters of the PM model (also of the Lennard–Jones type) from a given MDmodel. This leads to a number
of properties and trends of resulting Young�s modulus in function of these four parameters. We also investigate the
effect of volume, at fixed lattice spacing, on the resulting Young modulus. As an application, we use our model to revisit
the dynamic fragmentation of a copper plate with a skew slit [J. Phys. Chem. Solids, 50(12) (1989) 1245].
� 2004 Elsevier B.V. All rights reserved.
PACS: 68.45.Kg; 61.43.Bn; 62.50.+p; 46.30.My; 46.30.Nz; 83.80.Nb; 83.20.�dKeywords: Dynamics; Structural modeling; Shocks; Fracture mechanics; Cracks; Minerals; Constitutive relations
1. Introduction
Attaining a better understanding of the commi-
nution of rocks, such as commonly taking place in
the mining industry (e.g. [1]), is the primary moti-
0927-0256/$ - see front matter � 2004 Elsevier B.V. All rights reserv
doi:10.1016/j.commatsci.2004.08.008
* Corresponding author. Tel.: +514 398 7394; fax: +514 398
7365.
E-mail address: [email protected] (M. Ostoja-
Starzewski).
vation of the present study. Comminution involves
complex crushing and fragmentation processes,
which, from a basic engineering science perspec-
tive, are complex dynamic fractures of multi-phase
materials. Thus, there is a need to simulate such
processes from basic principles. The first tool that
comes to mind is the continuum-type dynamic
fracture mechanics. That approach, however, iswell suited for analysis of well defined boundary-
initial-value problems with simple geometries,
ed.

Nomenclature
Fa interaction force (F = �G/rp + H/rq) perpair atoms
/a interaction potential energy (/ = ��Fdr)per pair atoms
Ga parameter G in atomic structure
Ha parameter H in atomic structure
Sa stiffness S0ð¼ ðd2/=dr2Þr¼r0Þ in atomic
structure
Ea Young�s modulus (E = S0/r0) in atomicstructure
ra equilibrium position in atomic struc-
ture, e.g., 2.46A for copper
pa exponential parameter in atomic
structure
qa exponential parameter in atomicstructure
ma mass of each atom (g)
i max total quasi-particle number in x–
direction
j max total quasi-particle number in y–
direction
k max total quasi-particle number in z–
directionA length of material specimen (cm)
B width of material specimen (cm)
C height of material specimen (cm)
430 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
e.g. [2]. When more complex shapes are involved,
numerical methods based on this approach—usu-
ally involving finite element methods—are neces-
sary, and, with increasing problem complexity, tend
to be unwieldy. Thus, when multiple cracks occur
in minerals of arbitrary shapes with complex and
disordered microstructures, yet another method
is needed. To this end, we propose here a powerfulmodeling technique involving a uniform lattice dis-
cretization of the material domain, providing the
lattice spacing is smaller (or much smaller) than
the single heterogeneity of interest, e.g. [3,4]. The
heterogeneity is, say, a gold particle, whose libera-
tion from the mineral is of major industrial interest
in the fragmentation process. While the case of quasi-
static fracture/damage phenomena was researchedin the past decade, the intrinsically dynamic com-
minution requires a fully dynamic lattice-type
model with nonlinear constitutive responses.
In this paper series we adopt the so-called parti-
cle modeling (PM), developed by Greenspan [5–8]
as an alternative to computational continuum
physics methods in problems which become either
hopelessly intractable or very expensive (time con-suming) in atomistic and multi-scale solid and fluid
systems. Since the method has its roots in molecu-
lar dynamics, it is sometimes called quasi-mole-
cular modeling or discrete modeling. In essence,
particle modeling is a dynamic simulation that uses
small discrete solid physical particle (or quasi-
molecular particles) as a representation of a given
fluid or solid.
The two basic rules in the model set-up on lar-
ger-than-atomistic-scales are the conservation of
mass and the conservation of equilibrium energy
between the quasi-particle system and the atomis-
tic material structure. Interaction between any twoneighbors in PM involves a potential of the same
type as the interatomic potential—here typically
one of a Lennard–Jones type. Particle modeling
can handle very complicated interactions in solid
and fluid mechanics problems, also with compli-
cated boundary and/or initial conditions; an exam-
ple of the latter is the dynamic free surface
generation in solids� fracture. In fact, due to theseadvantages, particle modeling has recently found
increasing use in mineral and mining research
especially in the studies of tumbling mills [9,10].
Research of the existing literature in PM shows
that the following questions still remain open:
1. How does the choice of parameters in the inter-
action potential affect the resulting Young mod-ulus and the effective strength of the material to
be modeled?
2. How does the choice of volume of the simulated
material, at fixed lattice spacing of quasi-parti-
cles, affect the resulting Young modulus?

G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 431
3. How does the choice of parameters in the inter-
action potential affect fracture of a copper plate
(an example problem in studies [6,7])?
4. What are the combined effects of all three fac-
tors above?5. What would be a proper, or optimal, choice of
a? (a is a parameter introduced by Greenspan
defining particle interaction as ‘‘small relative
to gravity’’.)
In this paper we address the above issues, and
use the same basic set-up of a copper plate with
an initial slit (crack) undergoing dynamic fractureas that in the aforementioned works of Greenspan.
We abandon Greenspan�s definition of particle
interaction as small ‘‘relative to gravity’’ in his dy-
namic equations that actually result in a pseudo-
dynamic solution. In so doing, we also modify
the proper time increment in PM. In essence, we
set up rules for the formulation of models of frac-
ture of multi-phase materials, which are thenimplemented in practical comminution problems
in Part II of this paper series.
2. Theoretical introduction
2.1. Classical molecular dynamics (MD)
In molecular dynamics (MD), the motion of a
system of atoms or molecules is governed by
classical molecular potentials and Newtonian
mechanics. In our study, following [7], a 6-12 Len-
nard–Jones potential of copper is adopted
/ðrÞ ¼ � 1:398068� 10�10
r6þ 1:55104� 10�8
r12erg
ð1Þ
Here r is measured in angstroms (A). From Eq.(1), it follows that the interaction force F bet-
ween two copper atoms at r A apart is ap-
proximately
F ðrÞ ¼ � d/ðrÞdr
¼ � 8:388408� 10�2
r7þ 18:61246
r13dyne ð2Þ
The minimum of / results when F(r) = 0, which
occurs at ra ¼ 2:46 A, and we have
/ð2:46AÞ ¼ �3:15045� 10�13 erg ð3ÞIn [11] Ashby and Jones present a simple method
to evaluate Young�s modulus E of the material
from /(r), namely
E ¼ S0
r0ð4Þ
where
S0 ¼d2/dr2
� �r¼r0
ð5Þ
With this method, we obtain Young�s modulus of
copper as 152.94GPa, a number that closely
matches the physical property of copper and cop-
per alloys valued at 120–150GPa.
Ashby & Jones [11] also defined the continuum-
type tensile stress r(r) as
rðrÞ ¼ NF ðrÞ ð6Þwhere N is the number of bonds/unit area, equal to
1=r20. Tensile strength, rTS, results when dF ðrÞdr ¼ 0,
that is, at rd = 2.73A, the bond damage spacing,
and yields
rTS ¼ NF ðrdÞ ¼ 462:84MN=m2 ð7ÞThis number falls within the range of values re-
ported for actual copper and copper-based alloys:
250–1000MN/m2.
2.2. Particle modeling (PM)
In particle modeling (PM), the interaction force
is also considered only between nearest-neighbor
(quasi-)particles and assumed to be of the sameform as in MD:
F ¼ �Grp
þ Hrq
ð8Þ
Here G, H, p and q are positive constants, and
q > p to obtain the repulsive effect that is necessar-ily (much) stronger than the attractive one.
The four parameters G through q are yet to be
determined. If p, q and r0 (the equilibrium spacing
between two quasi-particles) are given, then, by
conditions of mass and energy conservation, G

432 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
and H can be derived. Consequently, Young�smodulus is evaluated by Eq. (4) and tensile
strength by Eq. (7). To represent an expected
material property such as copper in this study,
we would have to do many sets of testing until aunique (p,q) is found to match both Young�s mod-
ulus and tensile strength of the material. Obvi-
ously, on the other hand, even though the MD
energy equation for copper is kept, changing
(p,q) in Eq. (8) can result in different material
properties, say, ductile or brittle. In this paper,
for simplicity, we map out a range of different
materials according to this idea.Just as in MD, the dynamical equation of mo-
tion for each particle Pi of the system is then given
by [7]
mid2~ridt2
¼ aX
�Gi
rpijþ Hi
rqij
!~rjirij
" #; i 6¼ j ð9Þ
where mi and~rji are mass of Pi and the vector from
Pj to Pi; a is a normalizing constant for Pi obtained
from
aj � Gi=Dp þ Hi=Dqj < ð0:001Þ � 980mi ð10Þwhere D is distance of local interaction parameter,
1.7r0cm taken in this paper, where r0 is the equilib-
rium spacing of the quasi-particle structure. The
reason for introducing the parameter a by Green-
span was to define the interaction force between
two particles as local in the presence of gravity.
Henceforth, in contradistinction to [7], we set
a = 1.0. Indeed, after conducting many numericaltests, we find that setting a via Eq. (10) would re-
sult in a ‘‘pseudo-dynamic’’ solution. This is an
important correction to Greenspan�s theory.Note that if an equilateral triangular lattice
structure is adopted in 2-D, the resulting Poisson
ratio equals 1/4 (or 1/3) when a 3-D (respectively,
plane) elasticity formulation is adopted [13].
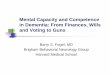
Fig. 1. Meshing system for a 2-D plate. Circles are positions of
void.
3. Coordinate-system setup
3.1. 2-D Plate
For the sake of a comparison, we follow the
example of Greenspan [7]: 2713 particles in two
dimensions (2-D) are used to simulate a rectangu-
lar copper plate 8cm · 11.43cm. The equilibrium
spacing is chosen at r0 = 0.2cm. The correspond-
ing mesh system is built via the following 1-D stor-
age method:
xð1Þ ¼ �3:9; yð1Þ ¼ �5:71576764
xð41Þ ¼ �4:0; yð41Þ ¼ �5:54256256
xðiþ 1Þ ¼ xðiÞ þ r0; yðiþ 1Þ ¼ yð1Þ;
i ¼ 1; 2; . . . ; 39
xðiþ 1Þ ¼ xðiÞ þ r0; yðiþ 1Þ ¼ yð41Þ;
i ¼ 41; 42; . . . ; 80
xðiÞ ¼ xði� 81Þ; yðiÞ ¼ yði� 81Þ þ 2r0 sin 60�;
i ¼ 82; 83; . . . ; 2713
Void particles are numbered as i = 1070 + 41k,
k = 0,1,2, . . . , 14. The corresponding mesh system
is shown in Fig. 1.

G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 433
3.2. 3-D rectangular block
We now construct a 40 · 67 · 20 mesh system in
x, y, and z directions, respectively, to approxi-
mately represent a domain 8 · 11.43 · 3.1cm of acopper rectangular block. Similarly, the equilib-
rium spacing is also chosen as r0 = 0.2cm. We
choose a face centered cubic (f.c.c) lattice structure
for the three-dimensional packing structure since
many common metals (e.g., Al, Cu and Ni) have
this structure type [11].
First, in the x–y plane, a 40 · 67 mesh system
is constructed in a similar way as in the 2-Dcase. The left-corner point is, x(1,1,1) = �3.9,
y(1,1,1) = �5.71576764, z(1,1,1) =� 1.5513435038.
It is built up by:
The coordinate of first row:
xði; 1; 1Þ ¼ xð1; 1; 1Þ þ r0 � ði� 1Þyði; 1; 1Þ ¼ yð1; 1; 1Þzði; j; 1Þ ¼ zð1; 1; 1Þ i ¼ 1; 2; 3; . . . ; 40
Then,
(i) for odd rows:
xði; j; 1Þ ¼ xði; 1; 1Þyði; j; 1Þ ¼ yði; 1; 1Þ þ r0 � sin 60� � ðj� 1Þzði; j; 1Þ ¼ zð1; 1; 1Þ j ¼ 1; 3; 5; . . .(ii) for even rows:
xði; j; 1Þ ¼ xði; j� 1; 1Þ � r0 � cos 60�
yði; j; 1Þ ¼ yði; j� 1; 1Þ þ r0 � sin 60�
zði; j; 1Þ ¼ zð1; 1; 1Þ j ¼ 2; 4; 6; . . .
In the z direction, for even sections, the displace-
ment increments in x, y and z are Dx = r0 cos
60�, Dy = r0 sin 60� and Dz ¼ r0ffiffiffi6
p=3. The mesh
system is obtained by
(i) for odd sections:
xði; j; kÞ ¼ xði; j; 1Þ � Dxyði; j; kÞ ¼ yði; j; 1Þ þ Dy=3zði; j; kÞ ¼ zði; j; 1Þ þ Dz� ðk � 1Þ k ¼ 1; 3; 5; . . .(ii) for even sections:
xði; j; kÞ ¼ xði; j; 1Þyði; j; kÞ ¼ yði; j; 1Þzði; j; kÞ ¼ zði; j; 1Þ þ Dz� ðk � 1Þ k ¼ 2; 4; 6; . . .
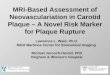
Fig. 2 shows this 3-D mesh system. We can cal-
culate the total number N* of atoms in this plate
as
N � ¼ 8� 108
raþ 1
� �� 11:43� 108
ra sin 60�þ 1
� �
� 3:1� 108
raffiffiffi6
p=3
þ 1
!ffi 2:6952� 1025 ð11Þ
Since the mass of a copper atom is 1.0542 ·10�22g, the total mass M of all the copper atoms
in our plate is M � 2.841 · 103g. By the mass con-
servation–meaning that the total mass of the atom-
istic structure (i.e., the MD system) must be equal
to that of the PM system–we determine each
(quasi-)particle�s mass: m � 5.3 · 10�2g.
4. Numerical methodology
Just as in molecular dynamics, there are two
commonly used numerical schemes in particle
modeling: ‘‘completely conservative method’’ and
‘‘leapfrog method.’’ The first scheme is exact but
requires a very costly solution of a large algebraicproblem, while the second one is approximate.
Since in most problems, both in MD and in PM,
one needs thousands of particles to adequately
represent a simulated body, the completely conser-
vative method is unwieldy and, therefore, com-
monly abandoned in favor of the leapfrog
method [12]. In the following, we employ the latter
one.
4.1. Leapfrog method
The leapfrog formulas relating position, veloc-
ity and acceleration for particles Pi(i = 1,2, . . . ,N)
[7] are
~V i;1=2 ¼ ~V i;0 þðDtÞ2
~ai;0 ðstarter formulaÞ ð12Þ
~V i;kþ1=2 ¼ ~V i;k�1=2 þ ðDtÞ~ai;k; k ¼ 1; 2; 3; . . . ð13Þ
~ri;kþ1 ¼~ri;k þ ðDtÞ~V i;kþ1=2; k ¼ 0; 1; 2; . . . ð14Þ
where ~V i;k,~ai;k and~ri;k are the velocity, accelerationand position vectors of particle i at time tk = kDt,

Fig. 2. Meshing system for a 3-D material body.
434 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
Dt is the time step. ~V i;kþ1=2 stands for the velocity
of particle i at time tk = (k + 1/2)Dt, and so on.
Notably, the leapfrog method is of second-order
accuracy: O((Dt)2) [7,12].
4.2. Stability of leapfrog method
To ensure that numerical errors do not growrapidly in time, the time step has to satisfy a stabil-
ity condition. In PM, the safe time step is obeyed
by the same formulas as those in MD, wherein it
is dictated by the root locus method [12]:
XDt � 2; X ¼ 1
mdFdr
��������max
� �1=2
; ð15Þ
Now, observe from (8) that, as r! 0, dF/dr ! 1,
resulting in Dt ! 0. Since this may well cause
problems in computation, one thus introduces a
smallest distance between two particles:
(i) For a stretching problem of a plate/beam, wetake ðdF =drmaxÞ � ðdF =drÞr¼r0
.
(ii) For an impact problem, we need to set a min-
imum distance limiting the spacing between
any two nearest-neighbor particles, e.g., rmin =
0.1 · r0. This means that within rmin, the inter-
particle force remains equal to that at rmin. It is
easy to see from Fig. 7(b) that, in this case, this
suitable time increment is greatly reduced
because of a rapid increase in X. Note, if a
kinematic boundary condition is adopted for
the impact case, then the safe time step should
also be constrained by Dt · u�r0. Obviously,it will break correct physical boundary condi-
tion if u exceeds r0 in one time step. Generally
speaking, impact cases require much smaller
Dt than stretching cases [14].
From Eq. (15), we find that, Dt � 10�7 � 10�6 s.
We observe that, even within the domain of stabletime increments, adopting a smaller time step can
result in smoother results. Therefore, Dt = 10�7 s
is applied for stretching/tensile cases and Dt =10�8 s for impact/compression cases in our study.
There also exists another criterion for stability
and convergence [1]: DT < 2ffiffiffiffiffiffiffiffiffim=k
p, where m is
the smallest mass to be considered, k is the stiffness
that is the same as S0 in Eq. (5). In effect, there isnot much quantitative difference between both cri-
teria in case of tensile loadings.

G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 435
5. Important rules for application of PM model
5.1. Passage from MD model to PM model via
equivalence of mass and energy
As we have seen from Eq. (8), different (p,q)
values result in different material properties, such
as Young�s modulus E. It is not difficult to see that
changing the equilibrium spacing r0 and volume of
the simulated material, V(=A · B · C) will addi-
tionally influence Young�s modulus. Therefore, in
general, we have some functional dependence
E ¼ f ðp; q; r0; V Þ ð16ÞAt this point, let us note that the PM model is de-
rived from the MD model based on the conserva-
tion (or equivalence) of mass and energy between
both systems. The ensuing derivation generalizes
basic ideas outlined by Greenspan [7]. We choose
a face centered cubic (f.c.c) lattice for both atomicand quasi-particle structures, and consider
qa > pa > 1.
First, for the atomic structure (MD model), we
have: interaction force [dynes]:
F a ¼ �Ga
rpaþ H a
rqað17Þ
interaction potential energy [ergs]:
/a ¼Gar1�pa
1� paþ H ar1�qa
1� qa
� �� 10�8 ð18Þ
stiffness:
Sa ¼ � dF a
dr
� �r¼ra
� 10�8 ð19Þ
Young�s modulus [GPa]:
Ea ¼Sa
ra
� �� 106 ð20Þ
total number of atoms:
N � ¼ A� 108
raþ 1
� �� B� 108
ra sin 60�þ 1
� �
� C � 108
raffiffiffi6
p=3
þ 1
!ð21Þ
Next, for the quasi-particle structure (PM model),
we have: interaction force [dynes]:
F ¼ �Grp
þ Hrq; q > p ð22Þ
interaction potential energy [ergs]:
/ ¼ Gr1�p
1� pþ Hr1�q
1� q; for p > 1 ð23Þ
/ ¼ G ln r þ Hr1�q
1� q; for p ¼ 1 ð24Þ
stiffness:
S0 ¼ � dFdr
� �r¼r0
ð25Þ
Young�s modulus [GPa]:
E ¼ S0
r0ð26Þ
total number of quasi-particles:
N ¼ imax � jmax � kmax ð27ÞWe now postulate the equivalence of MD and PM
models. From the mass conservation, we calculate
the mass of each quasi-particle M:
M ¼ N � � ma=N ð28ÞFrom the energy conservation, we have:
ðN � /Þr¼r0¼ ðN � � /aÞr¼ra
ð29Þ
under the requirement:
F ðr0Þ ¼ 0 ð30ÞFrom Eqs. (29), (30), we now derive Young�s mod-
ulus E: for p = 1:
G ¼ Hr1�qo ; H ¼
ðN � � /aÞr¼rað1� qÞ
Nð1� qÞr1�q0 ln r0 � r1�q
0
ð31Þ
E ¼ �Gr�30 þ qHr�q�2
0 ð32Þfor p > 1:
G ¼ Hr1�q0 ; H ¼
ðN � � /aÞr¼rað1� pÞð1� qÞ
Nðp � qÞ rq�10
ð33Þ
E ¼ �pGr�p�20 þ qHr�q�2
0 ð34ÞAt this stage we introduce two additional condi-
tions: equality of Young�s modulus (E) and ten-
sile strength (rTS) in the PM and MD models.

Table 1
G, H and E corresponding to different (p,q) chocies
(p,q) 3–5 5–10 7–14
G 2.473 · 107 1.781 · 106 1.102 · 105
H 9.892 · 105 5.698 · 102 1.411
E (GPa) 15.457 69.557 150.7062
436 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
Evidently, the four parameters (p,q), r0 and V af-
fect E and rTS, and, in the following, we discuss
those dependencies in detail.
5.2. Effect of changing (p,q) at fixed r0 and
volume V
Using the mesh system shown in Fig. 2 (r0 =
0.2cm, V = 8.0 · 11.43 · 3.1cm3), we can simulate
a range of different materials with (p,q) pairs
drawn from p = 1,2, . . . , 14 and q = 2,3, . . . , 15,
Fig. 3. Young�s modulus and tensile strength by (p,q) in
interaction force equation as r0 = 0.2cm: (a) Young�s modulus
and (b) tensile strength.
providing q > p. First, Fig. 3(a) shows clearly that,
in general, under a fixed r0 and a fixed volume V,
the larger the p and q values are adopted, the lar-
ger is Young�s modulus.
Fig. 4. Time-dependent fracture of a slotted plate, with
r0 = 0.2cm, (p,q) = 3,5 DT = 10�7 s, stretching rate = 20cm/s.
(a) T = 0.0s, (b) T = 2.6 · 10�2 s, (c) T = 3.007 · 10�2 s and (d)
T = 3.0 · 10�2 s.
rTS (MN/m ) 86.205 263.570 441.534

G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 437
Next, we shall mainly take these three pairs as
our principal study cases: (p,q) = (3,5); (5,10)
and (7,14). Table 1 shows the different G, H and
Young�s modulus, E, values under this change of
(p,q). In particular, compared with the physicalYoung modulus of copper, it is obvious that
(p,q) = (7,14) is most suitable. This suggests a rule
for choosing a suitable (p,q) in the PM model:
based on fixed r0 and V, we can do a series of com-
putations on (p,q) and then, select that (p,q) pair
which results in E matching a given E. In general,
that there are several (p,q) pairs that result in E
and material strength (very) close to the desired
Fig. 5. Time-dependent fracture of a slotted plate with
r0 = 0.2cm, (p,q) = 5, 10. DT = 10�7 s, stretching rate = 20cm/
s. (a) T = 0.0s, (b) T = 1.477 · 10�2 s, (c) T = 1.485 · 10�2 s and
(d) T = 1.489 · 10�2 s.
value, but have differing toughnesses. Thus, we
actually have some degree of freedom in choosing
those PM parameters, which offer more or less
toughness, depending on the given material being
modeled.The larger the (p,q) values are, the more rapid
the fracture process. To have full freedom in choos-
ing toughness, one would have to use a more com-
plicated potential (a composite one) having five
parameters. Continuing this line of thinking, one
would need yet another parameter to model mate-
rials with a 3-D Poisson ratio different from 1/4,
and so on when more precise modeling is desired.
Fig. 6. Time-dependent fracture of a slotted plate with
r0 = 0.2cm, (p,q) = 7,14. DT = 10�7 s, stretching rate = 20cm/
s. (a) T = 0.0s, (b) T = 1.024 · 10�2 s, (c) T = 1.026 · 10�2 s and
(d) T = 1.030 · 10�2 s.

438 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
Figs. 4–6 show time-dependent vector fracture
results when the above three choices are used,
respectively, at a fixed r0 (0.2cm) and V
(8.0 · 11.43cm2); also Dt = 1.0 · 10�7 s. A kine-
matical boundary condition is used at the topand the bottom edges: they are stretched outward
at a constant velocity of 20.0cm/s. A zero-traction
condition is applied at side edges.
Fig. 7. Potential energy and interaction force of PM under
r0 = 0.2cm, V = 8.0 · 11.43 · 3.1cm3. (a) Potential energy and
(b) interaction force.
A comparison of these three pictures shows
that, for smaller (p,q) values (and hence, smaller
Young�s modulus E), the fracture process is slower
than at larger (p,q). By virtue of the formulas
of Section 5.1, with E decreasing, there is an in-crease of toughness, Fig. 7. We also note from
Figs. 4–6 that the higher is Young�s modulus, E,
the more pieces is the material fragmented into:
brittleness increases. This conclusion provides a
stepping-stone to PM simulation of crushing
processes.
5.3. Effect of changing r0 and (p,q) at
fixed-volume V
In some situations, when the size of the simu-
lated material is fixed, within the satisfaction of
engineering need, we often hope to get rapid result
by an adoption of as big equilibrium spacing as
possible. So the question is, what is the relation-
ship between changing (p,q), r0 and E? The answeris shown by Fig. 8, in which V = 8.0 · 11.43 ·3.1cm3 and r0 is changed from 0.1 to �0.5cm.
It shows that for the cases of p = 1, the larger
change with r0 is adopted, the bigger E is obtained.
On the contrary, for p 5 1 cases, the larger change
with r0, the smaller E is resulted. But, generally
speaking, this increase or decrease does not change
Fig. 8. Inter-relationship between E,r0 and (p,q) at a fixed
volume of material V = 8.0 · 11.43 · 3.1cm3.

G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 439
very much (<30GPa in maximum for r0 = 0.1–
0.5cm). Similarly, small (p,q) compositions pro-
duce small E, and the differences between them
are also small. This observation may be very useful
in cases of modest computer facilities—for in-
Fig. 9. Young�s modulus, E, for varying r0, volume V and (p,q). (a)
(e) (p, q) = 5, 10 and (f) (p, q) = 7, 10.
stance, a choice of r0 = 0.2cm instead of 0.1cm
in a 3-D problem could reduce the number of par-
ticles by a factor of 23, but the difference in E be-
tween these two adoptions would be smaller than
10GPa.
(p, q) = 1.5, (b) (p, q) = 1, 10, (c) (p, q) = 1, 14, (d) (p, q) = 3, 5,

440 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
5.4. Effect of changing r0, volume V and (p,q)
When r0, volume V and (p,q) are all varied, the
dependence on p = 1 is qualitatively different from
that at p5 1, Fig. 9. The results are drawn here bygradually changing the initial volume V (=8.0 ·11.43 · 3.1cm3) as well as the distance r0. For
p = 1, if V fixed, E gets larger as r0 increases,
but, if r0 is fixed, a small increase in V can result
in a larger E. Following this, E keeps constant
even if a continuous increase of r0 is carried out.
For all the p 5 1 cases, as opposed to p = 1,
with an increase of r0, E decreases. Also, for eachr0, E increases only a little with the volume up to a
certain volume, and then remains constant. Thus,
it is impractical to increase E by setting up a large
volume. To sum up, high (p,q) values result in
large E.
5.5. Effect of changing volume V and (p,q) at
fixed r0
We now turn to this question: For a 3-D lattice
structure, at a fixed r0, what is the effect of increas-
ing volume by an enlargement in the X, Y, and Z
directions? First, Fig. 10 illustrates the effect of
(p,q)–taking values (1,5), (1,10), (1,14), (3,5)
Fig. 10. Young�s modulus for different (p,q), increasing in X
direction as a fixed amplifier of 25 in both Y and Z directions.
(5,10) up to (7,14)–on Young�s modulus. Here
the X, Y and Z directions are all amplified from
the reference spacing r0 = 0.2cm. It is clearly seen
that E increases quite rapidly within a small
enlargement of length in X direction and then con-verges to a constant for all different (p,q) combina-
tions. This results in a very important hint for a
PM user: to choose a �safe� computation domain
in case of a fixed r0, and we see that E does not
change much beyond the size 25 · r0.
Since all the cases of (p,q) have the same effect
on E, here we may focus on (p,q) = (7,14) for
further discussion. Fig. 11 shows how the chang-ing of volume in all three directions will affect E
at (p,q) = (7,14). From two different angles of
view, we see that E is quite small when a small
computation domain is adopted—below, say, five
times larger than the grid spacing–but increases
quite rapidly afterwards, and it asymptotes to a
constant beyond an enlargement factor of 25
times.
6. Conclusions
This paper series employs particle modeling
(PM) approach for simulation of dynamic fracture
phenomena in homogeneous and heterogeneous
materials, such as encountered in comminutionprocesses in the mining industry. This first paper
is concerned with the setup of a particle model
having the same functional form as the molecular
dynamics (MD) model (i.e., the Lennard–Jones
potential), yet on centimeter length scales.
Basically, we have four conditions to determine
four unknown variables, G, H, p and q of the PM
model: (i) the same mass in the PM and MD mod-els, (ii) the same elastic energy in the PM and MD
models, (iii) equality of Young�s modulus in the
PM and MD models, (iv) the same tensile strength
in the PM and MD models. We have derived
the equations for G, H, p and q, and carried out a
parametric study to find the differing effects on p,
q, V and r0. Overall, we have found the following
rules:
(i) The larger the values of (p,q) are adopted, the
larger is E generated. This is typically associ-

Fig. 11. Young�s modulus, E, generated by increasing volume V in 3 axis with a fixed r0 = 0.2cm and (p,q)t = 7,14. (a) Angle of view I
and (b) Angle of view II.
G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442 441
ated with the material becoming more brittlethan ductile, albeit there is a range of tough-
ness to choose from. Also, with E going up,
there is a fragmentation into a larger number
of pieces.
(ii) In the case of p = 1, the larger r0 spacing isadopted, the higher is Young�s modulus of
the PM material. On the contrary, in the spe-
cial case of p 5 1, there is an opposite trend.
In any case, this increase or decrease does not

442 G. Wang, M. Ostoja-Starzewski / Computational Materials Science 33 (2005) 429–442
change very much (i.e. it is below 30GPa) at
r0 = 0.1–0.5cm.
(iii) In the case of p 5 1, while keeping the vol-
ume fixed, an increase of r0 produces a
decrease of Young�s modulus. The situationis again opposite in the case of p = 1.
(iv) A uniform augmentation of volume V by dila-
tion in all three directions (XYZ), at any
(p,q) combination, results in Young�s modu-
lus increasing first strongly and then leveling
off.
We have also used our model to revisit the pre-viously studied case of dynamic fragmentation of a
copper plate with a skew slit, and we have modi-
fied the previous results of Greenspan in two ways.
First, we corrected the ‘‘local interaction parame-
ter’’ concept in his dynamic equations that render
his theory a pseudo-dynamic model, so as to have
the full dynamics. Secondly, we studied the influ-
ence of four parameters G, H, p and q of the PMmodel according to the new equivalence of the
MD and PM models.
Acknowledgments
We have benefited from correspondence with
Prof. D. Greenspan (University of Texas atArlington). Discussions with the staff at COREM,
Quebec City, have proved helpful in orienting
this research. The work reported herein has been
made possible through support of the Canada Re-
search Chairs program and the funding from
NSERC.
References
[1] T.J. Napier-Munn, S. Morrell, R.D. Morrison and T.
Kojovic, Mineral Comminution Circuits—Their Operation
and Optimisation, Julius Kruttschnitt Mineral Research
Centre, The University of Queensland, 1999.
[2] L.B. Freund, Dynamic Fracture Mechanics, Cambridge
University Press, Cambridge, 1990.
[3] M. Ostoja-Starzewski, P.Y. Sheng, I. Jasiuk, Damage
patterns and constitutive response of random matrix-
inclusion composites, Eng. Fract. Mech. 58 (5& 6) (1997)
581–606.
[4] K. Alzebdeh, A. Al-Ostaz, I. Jasiuk, M. Ostoja-Starzewski,
Fracture of random matrix-inclusion composites: scale
effects and statistics, Intl. J. Solids Struct. 35 (19) (1998)
2537–2566.
[5] D. Greenspan, Computer-Oriented Mathematical Physics,
Pergamon Press, Oxford, 1981.
[6] D. Greenspan, Supercomputer simulation of cracks and
fractures by quasi-molecular dynamics, J. Phys. Chem.
Solids 50 (12) (1989) 1245–1249.
[7] D. Greenspan, Particle Modeling, Birkhauser Publishing,
Boston, 1997.
[8] D. Greenspan, New approaches and new applications for
computer simulation of N-body problems, Acta Applican-
dae Mathematicae 71 (2002) 279–313.
[9] L.K. Nordell, A.V. Potapov, Comminution simulation
using discrete element method (DEM) approach–from
single particle breakage to full-scale SAG mill operation,
SAG, 2001.
[10] D.D. Zhang, Simulation Techniques for Discrete Element
Models, Ph.D. Thesis, University of Queensland, 1998.
[11] M.F. Ashby, D.R.H. Jones, Engineering Materials 1: An
Introduction to Their Properties and ApplicPergamon
Press, Pergamon Press, Oxford, 1980.
[12] R.W. Hockney, J.W. Eastwood, Computer Simulation
Using Particles, McGraw Hill, New York, 1999.
[13] M. Ostoja-Starzewski, Lattice models in micromechanics,
Appl. Mech. Rev. 55 (1) (2002) 35–60.
[14] M. Moore, J. Wilhelms, Collision detection and response
for computer animation, Computer Graphics 22 (4) (1998)
289–298 (SIGGRAPH�88 Proceedings).