Embed Size (px)
Citation preview

ME437/537 G. Ahmadi1
Particle Adhesion and Detachment Models
Figure 1 shows the schematic of a particle of diameter d attached to a flat surface.Here P is the external force exerted on the particle, a is the contact radius and adF is the
adhesion force. The classical Hertz contact theory provides for the elastic deformation ofbodies in contact, but neglects the adhesion force. Several models for particle adhesionto flat surfaces were developed in the past that improves the Hertz model by including theeffect of adhesion (van der Waals) force.
JKR Model
Johnson-Kandall-Roberts (1971) developed a model (The JKR Model) thatincluded the effect of adhesion force on the deformation of an elastic sphere in contact toan elastic half space. Accordingly, the contact radius is given as
˙˙
˚
˘
ÍÍ
Î
Ș¯
ˆÁË
Ê p+p+p+=
2
AAA
3
2
dW3dPW3dW
23
PK2d
a (1)
Here AW is the thermodynamic work of adhesion, and K is the composite Young'smodulus given as
adF
P
O
a
d

ME437/537 G. Ahmadi2
1
2
22
1
21
E
1
E
1
34
K-
˙˚
˘ÍÎ
È u-+
u-= (2)
In Equation (2), E is the elastic modulus, u is the Poisson ratio, and subscript 1 and 2refer to the materials of the sphere and substrate.
In the absence of surface forces, ,0WA = and Equation (1) reduced to theclassical Hertz model. That is
K2dP
a3 = (3)
Pull-Off Force
The JKR model predicts that the force needed to remove the particle (the pull-offforce) is given as
dW43
F AJKRpo p= (4)
Contact Radius at Zero Force
The contact radius at zero external force may be obtained by setting P = 0 inEquation (1). That is,
3
12
A0 K2
dW3a ˜̃
¯
ˆÁÁË
Ê p= (5)
Contact Radius at Separation
The contact radius at the separation is obtained by setting JKRpoFP -= in Equation
(1). The corresponding contact radius is given by
3/10
3
12
A
4
a
K8
dW3a =˜̃
¯
ˆÁÁË
Ê p= (6)
ME437/537 G. Ahmadi3
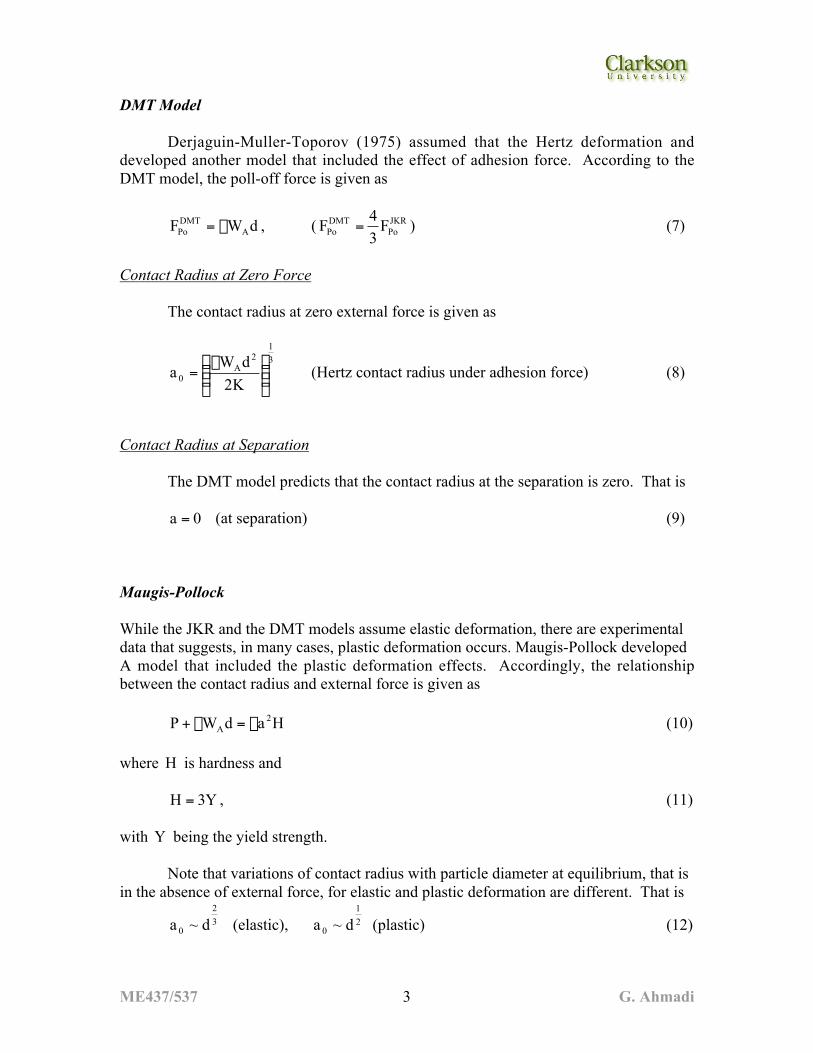
DMT Model
Derjaguin-Muller-Toporov (1975) assumed that the Hertz deformation anddeveloped another model that included the effect of adhesion force. According to theDMT model, the poll-off force is given as
dWF ADMTPo p= , ( JKR
PoDMTPo F
34
F = ) (7)
Contact Radius at Zero Force
The contact radius at zero external force is given as
3
12
A0 K2
dWa ˜̃
¯
ˆÁÁË
Ê p= (Hertz contact radius under adhesion force) (8)
Contact Radius at Separation
The DMT model predicts that the contact radius at the separation is zero. That is
0a = (at separation) (9)
Maugis-Pollock
While the JKR and the DMT models assume elastic deformation, there are experimentaldata that suggests, in many cases, plastic deformation occurs. Maugis-Pollock developedA model that included the plastic deformation effects. Accordingly, the relationshipbetween the contact radius and external force is given as
HadWP 2A p=p+ (10)
where H is hardness and
Y3H = , (11)
with Y being the yield strength.
Note that variations of contact radius with particle diameter at equilibrium, that isin the absence of external force, for elastic and plastic deformation are different. That is
3
2
0 d~a (elastic), 2
1
0 d~a (plastic) (12)

ME437/537 G. Ahmadi4
Thermodynamic Work of Adhesion
The thermodynamic work of adhesion (surface energy per unit area) is given as
20
A z12
AW
p= (13)
where A is the Hamaker constant and oz is the minimum separation distance.
Non-Dimensional Forms
Nondimensional form of the relationship between contact radius and the externalforce and the corresponding moment are described in the section.
JKR Model
Equation (1) in nondimensional form may be restated as
**3* P21P1a -+-= (14)
where the nondimensional external force and contact radius are defined as
dW23
PP
A
*
p-= ,
3
12
A
*
K4
dW3
aa
˜̃¯
ˆÁÁË
Ê p
= (15)
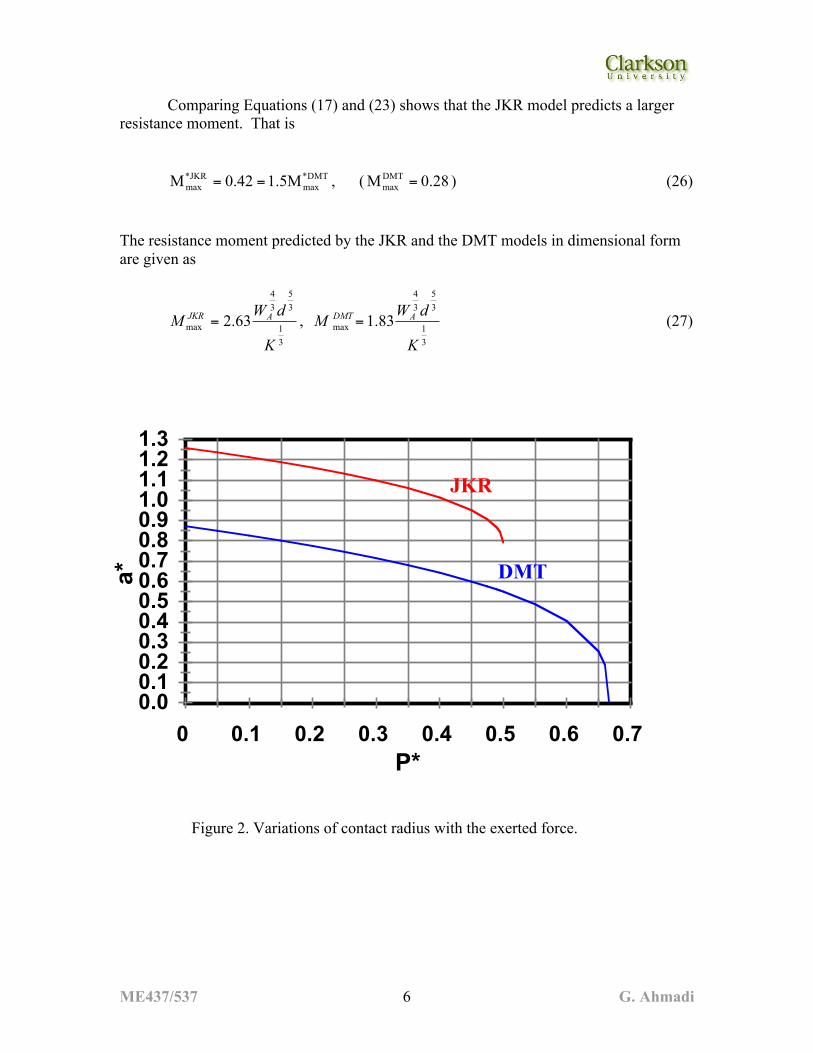
Variation of the nondimensional contact radius with the nondimensional force is shownin Figure 2. Note that for 0P* = , Equation (14) and Figure 2 shows that 26.1a*
0 = .
The corresponding resistance moment about point O in Figure 1 as a function ofnondimensional force is given as
3/1*****JKR* )P21P1(PaPM -+-== (16)
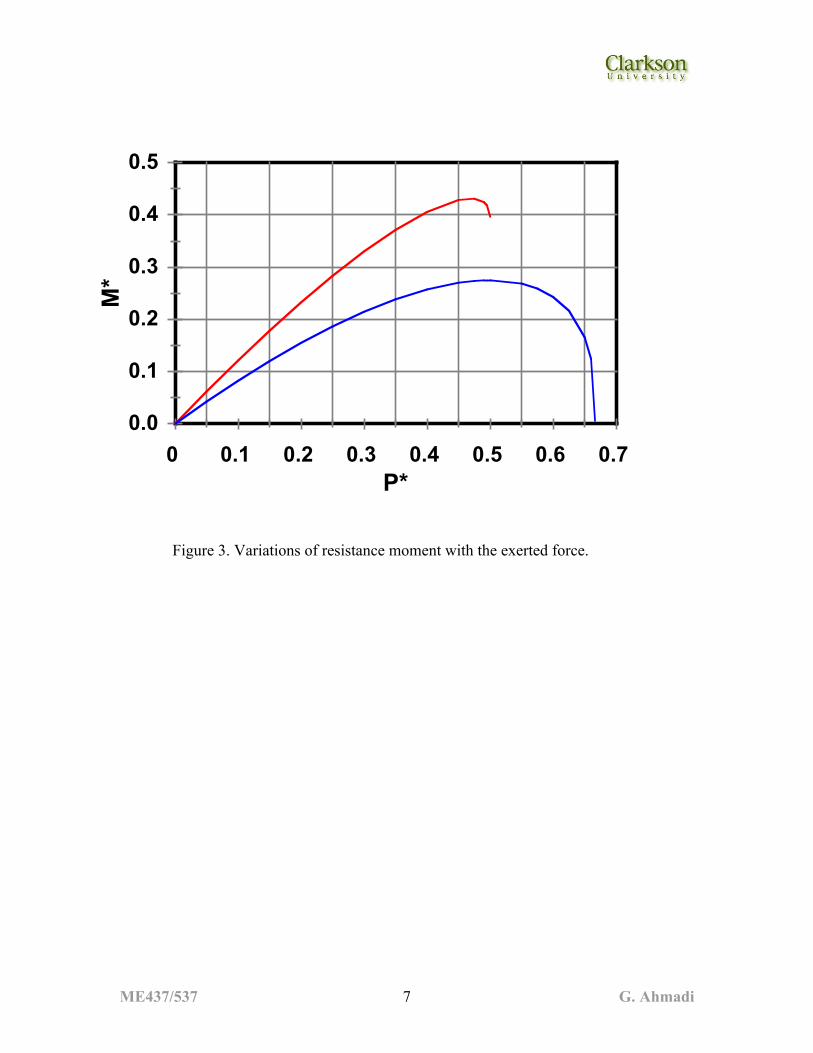
Figure 3 shows the variation of the resistance moment as predicted by the JKR model.The corresponding maximum resistance moment then is given by
42.0M JKR*max = (17)
and
ME437/537 G. Ahmadi5
5.0dW
23
FFP
A
JKRJKR*
po*max =
p== (18)
The resistance moment at *P is 397.0M JKR* = . Also
63.0aP *0
*max = (19)
DMT
For DMT Model, the approximate expression for the contact radius is given as
( )dWPK2
da A
3 p+ª (20)
or
3
2P)
K4/dW3
a(a *3
2A
3* +-=p
= (21)
Variation of the nondimensional contact radius with the nondimensional force aspredicted by the DMT model is shown in Figure 2 and is compared with the JKR model.Note that for 0P* = , Equation (21) and Figure 2 shows that 874.0a*
0 = .
The corresponding resistance moment as a function of nondimensional force aspredicted by the DMT model is given as
3/1**DMT* )P3/2(PM -= (22)
The variation of the resistance moment as predicted by the DMT model is also shown inFigure 3. The corresponding maximum resistance moment is
28.0M DMT*max = (23)
Note also that the maximum force (the poll-off force) is given by
32
dW2
3F
FP
A
DMTDMT*
po*max =
p== (24)
and
58.0aP *0
*max = (25)
ME437/537 G. Ahmadi6
Comparing Equations (17) and (23) shows that the JKR model predicts a largerresistance moment. That is
DMT*max
JKR*max M5.142.0M == , ( 28.0MDMT
max = ) (26)
The resistance moment predicted by the JKR and the DMT models in dimensional formare given as
3
1
3
5
3
4
max 63.2
K
dWM AJKR = ,
3
1
3
5
3
4
max 83.1
K
dWM ADMT = (27)
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3
a*
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 P*
JKR
DMT
Figure 2. Variations of contact radius with the exerted force.
ME437/537 G. Ahmadi7
JKR
DMT
0.0
0.1
0.2
0.3
0.4
0.5
M*
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 P*
Figure 3. Variations of resistance moment with the exerted force.