Embed Size (px)
Citation preview

Tuesday 9:00-12:30
Part 3Robust Bayesian
statistics & applicationsin reliability networks
by Gero Walter
69

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
70

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
71

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parameters
I models from canonical exponential family make this easy to do[18]
I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]
I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]I close relations to robust Bayes literature, e.g. [7, 19, 20]
I concerns uncertainty in the prior(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet model
I if your prior is informative then prior-data conflict can be anissue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Why
I choice of prior can severely affect inferenceseven if your prior is ‘non-informative’
I solution: systematic sensitivity analysis over prior parametersI models from canonical exponential family make this easy to do
[18]I close relations to robust Bayes literature, e.g. [7, 19, 20]I concerns uncertainty in the prior
(uncertainty in data generating process: imprecise samplingmodels)
I here: focus on imprecise Dirichlet modelI if your prior is informative then prior-data conflict can be an
issue [31, 29](we’ll come back to this in the system reliability application)
72

Robust Bayesian Analysis: Principle of Indifference
How to construct a prior if we do not have a lot of information?
Laplace: Principle of IndifferenceUse the uniform distribution.Obvious issue: this depends on the parametrisation!
ExampleAn object of 1kg has uncertain volume V between 1` and 2`.
I Uniform distribution over volume V =⇒ E (V ) = 1.5`.I Uniform distribution over density ρ = 1/V =⇒
E (V ) = E (1/ρ) =∫ 10.5 2/ρdρ = 2(ln 1− ln 0.5) = 1.39`
The uniform distribution does not really model prior ignorance.(Jeffreys prior is transformation-invariant, but depends on thesample space and can break decision making!)
73

Robust Bayesian Analysis: Principle of Indifference
How to construct a prior if we do not have a lot of information?
Laplace: Principle of IndifferenceUse the uniform distribution.Obvious issue: this depends on the parametrisation!
ExampleAn object of 1kg has uncertain volume V between 1` and 2`.
I Uniform distribution over volume V =⇒ E (V ) = 1.5`.I Uniform distribution over density ρ = 1/V =⇒
E (V ) = E (1/ρ) =∫ 10.5 2/ρdρ = 2(ln 1− ln 0.5) = 1.39`
The uniform distribution does not really model prior ignorance.(Jeffreys prior is transformation-invariant, but depends on thesample space and can break decision making!)
73

Robust Bayesian Analysis: Principle of Indifference
How to construct a prior if we do not have a lot of information?
Laplace: Principle of IndifferenceUse the uniform distribution.Obvious issue: this depends on the parametrisation!
ExampleAn object of 1kg has uncertain volume V between 1` and 2`.
I Uniform distribution over volume V =⇒ E (V ) = 1.5`.I Uniform distribution over density ρ = 1/V =⇒
E (V ) = E (1/ρ) =∫ 10.5 2/ρdρ = 2(ln 1− ln 0.5) = 1.39`
The uniform distribution does not really model prior ignorance.(Jeffreys prior is transformation-invariant, but depends on thesample space and can break decision making!)
73

Robust Bayesian Analysis: Prior Ignorance via Sets ofProbabilities
How to construct prior if we do not have a lot of information?
Boole: Probability BoundingUse the set of all probability distributions (vacuous model).Results no longer depend on parametrisation!
ExampleAn object of 1kg has uncertain volume V between 1` and 2`.
I Set of all distributions over volume V =⇒ E (V ) ∈ [1, 2].I Set of all distribution over density ρ = 1/V =⇒
E (V ) = E (1/ρ) ∈ [1, 2]
74

Robust Bayesian Analysis: Prior Ignorance via Sets ofProbabilities
How to construct prior if we do not have a lot of information?
Boole: Probability BoundingUse the set of all probability distributions (vacuous model).Results no longer depend on parametrisation!
ExampleAn object of 1kg has uncertain volume V between 1` and 2`.
I Set of all distributions over volume V =⇒ E (V ) ∈ [1, 2].I Set of all distribution over density ρ = 1/V =⇒
E (V ) = E (1/ρ) ∈ [1, 2]
74

Robust Bayesian Analysis: Prior Ignorance via Sets ofProbabilities
TheoremThe set of posterior distributions resulting from a vacuous set ofprior distributions is again vacuous, regardless of the likelihood.We can never learn anything when starting from a vacuous set ofpriors.
Solution: Near-Vacuous Sets of PriorsOnly insist that the prior predictive, or other classes of inferences,are vacuous.This can be done using sets of conjugate priors [4, 5].
75

Robust Bayesian Analysis: Prior Ignorance via Sets ofProbabilities
TheoremThe set of posterior distributions resulting from a vacuous set ofprior distributions is again vacuous, regardless of the likelihood.We can never learn anything when starting from a vacuous set ofpriors.
Solution: Near-Vacuous Sets of PriorsOnly insist that the prior predictive, or other classes of inferences,are vacuous.This can be done using sets of conjugate priors [4, 5].
75

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
76

The Imprecise Dirichlet Model: DefinitionI introduced by Peter Walley [27, 28]I for multinomial sampling, k categories 1, 2, . . . , kI Bayesian conjugate analysis
I multinomial likelihood (sample n = (n1, . . . , nk),∑
ni = n)
f (n | θ) =n!
n1! · · · nk !
k∏
i=1
θnii
I conjugate Dirichlet priorI with mean t = (t1, . . . , tk) = prior expected proportionsI and parameter s > 0
f (θ) =Γ(s)
∏ki=1 Γ(sti )
k∏
i=1
θsti−1i
Definition (Imprecise Dirichlet Model)Use the setM(0) of all Dirichlet priors, for a fixed s > 0,and take the infimum/supremum over t of the posteriorto get lower/upper predictive probabilities/expectations.
77

The Imprecise Dirichlet Model: DefinitionI introduced by Peter Walley [27, 28]I for multinomial sampling, k categories 1, 2, . . . , kI Bayesian conjugate analysis
I multinomial likelihood (sample n = (n1, . . . , nk),∑
ni = n)
f (n | θ) =n!
n1! · · · nk !
k∏
i=1
θnii
I conjugate Dirichlet priorI with mean t = (t1, . . . , tk) = prior expected proportionsI and parameter s > 0
f (θ) =Γ(s)
∏ki=1 Γ(sti )
k∏
i=1
θsti−1i
Definition (Imprecise Dirichlet Model)Use the setM(0) of all Dirichlet priors, for a fixed s > 0,and take the infimum/supremum over t of the posteriorto get lower/upper predictive probabilities/expectations.
77

The Imprecise Dirichlet Model: Properties
I conjugacy: f (θ | n) again Dirichlet with parameters
t∗i =sti + nis + n
=s
s + nti +
ns + n
nin,
s∗ = s + n
I t∗i = E (θi | n) = P (i | n) is a weighted average of ti andni/n, with weights proportional to s and n, respectively
I s can be interpreted as a prior strength or pseudocountI lower and upper expectations / probabilities by min and max
over t ∈ ∆ (unit simplex)
78

The Imprecise Dirichlet Model: PropertiesPosterior predictive probabilities
I for observing a particular category
P (i | n) =ni
s + n, P (i | n) =
s + nis + n
I for observing a non-trivial event A ⊆ {1, . . . , k}
P (A | n) =nA
s + n, P (A | n) =
s + nAs + n
,
with nA =∑
i∈A ni
Satisfies prior near ignorance:vacuous for prior predictive P(A) = 0,P(A) = 1Inferences are independent of categorisation(‘Representation Invariance Principle’).
79

The Imprecise Dirichlet Model: Why A Set of Priors?
I single prior =⇒ dependence on categorisationI for example, single Dirichlet prior (with tA =
∑i∈A ti , s = 2)
P (A | n) =2tA + nAn + 2
one red marble observedI two categories red (R) and other (O):
prior ignorance =⇒ tR = tO = 12 =⇒ P (R | n) = 2
3I three categories red (R), green (G), and blue (B):
prior ignorance =⇒ tR = tG = tB = 13 =⇒ P (R | n) = 5
9
prior ignorance + representation invariance principle=⇒ must use set of priors
80

The Imprecise Dirichlet Model: Why A Set of Priors?
I single prior =⇒ dependence on categorisationI for example, single Dirichlet prior (with tA =
∑i∈A ti , s = 2)
P (A | n) =2tA + nAn + 2
one red marble observedI two categories red (R) and other (O):
prior ignorance =⇒ tR = tO = 12 =⇒ P (R | n) = 2
3I three categories red (R), green (G), and blue (B):
prior ignorance =⇒ tR = tG = tB = 13 =⇒ P (R | n) = 5
9
prior ignorance + representation invariance principle=⇒ must use set of priors
80

The Imprecise Dirichlet Model: The s Parameter
I s can be interpreted as a prior strength or pseudocountI s determines learning speed:
P (A | n) − P (A | n) =s
s + n
I no objective way of choosing s, but s = 2 covers mostBayesian and frequentist inferences
I for s = n posterior imprecision is half the prior imprecisionI for informative ti bounds, using a range of s values
allows the set of posteriors to reflect prior-data conflict(see system reliability application)
81

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
82

General Framework for Canonical Exponential FamiliesConjugate priors like the Dirichlet can be constructed for sampledistributions (likelihood) from:
Definition (Canonical exponential family)
f (x | ψ) = h(x) exp{ψT τ(x)− b(ψ))
}
I includes multinomial, normal, Poisson, exponential, . . .I ψ generally a transformation of original parameter θ
Definition (Family of conjugate priors)A family of priors for i.i.d. sampling from the can. exp. family:
f (ψ | n(0), y (0)) ∝ exp{n(0)[ψT y (0) − b(ψ)
]}
with hyper-parameters n(0) (↔ s) and y (0) (↔ t from IDM).
83

General Framework for Canonical Exponential FamiliesConjugate priors like the Dirichlet can be constructed for sampledistributions (likelihood) from:
Definition (Canonical exponential family)
f (x | ψ) = h(x) exp{ψT τ(x)− b(ψ))
}
I includes multinomial, normal, Poisson, exponential, . . .I ψ generally a transformation of original parameter θ
Definition (Family of conjugate priors)A family of priors for i.i.d. sampling from the can. exp. family:
f (ψ | n(0), y (0)) ∝ exp{n(0)[ψT y (0) − b(ψ)
]}
with hyper-parameters n(0) (↔ s) and y (0) (↔ t from IDM).83

General Framework for Canonical Exponential Families
Theorem (Conjugacy)Posterior is of the same form:
f (ψ | n(0), y (0), x) ∝ exp{n(n)
[ψT y (n) − b(ψ)
]}
where
x = (x1, . . . , xn)
(s∗ ↔) n(n) = n(0) + n
(t∗ ↔) y (n) =n(0)
n(0) + n· y (0) +
nn(0) + n
· τ(x)
n
(ni ↔) τ(x) =n∑
i=1
τ(xi )
84

General Framework for Canonical Exponential Families
I y (0) (↔ t) = prior expectation of τ(x)/nI n(0) (↔ s) determines spread and learning speed
I usefulness of this framework for IP / robust Bayesdiscovered by Quaghebeur & de Cooman [18]
I near-noninformative sets of priorsdeveloped by Benavoli & Zaffalon [4, 5]
I for informative sets of priors, Walter & Augustin [29, 31]suggest to use parameter sets Π(0) = [n(0), n(0)]× [y (0), y (0)]
85

General Framework for Canonical Exponential Families
I y (0) (↔ t) = prior expectation of τ(x)/nI n(0) (↔ s) determines spread and learning speed
I usefulness of this framework for IP / robust Bayesdiscovered by Quaghebeur & de Cooman [18]
I near-noninformative sets of priorsdeveloped by Benavoli & Zaffalon [4, 5]
I for informative sets of priors, Walter & Augustin [29, 31]suggest to use parameter sets Π(0) = [n(0), n(0)]× [y (0), y (0)]
85

General Framework: Why vary n(0)(↔ s)?
What if prior assumptions and data tell different stories?
Prior-Data ConflictI informative prior beliefs and trusted data
(sampling model correct, no outliers, etc.) are in conflictI “the prior [places] its mass primarily on distributions in the
sampling model for which the observed data is surprising” [10]I there are not enough data to overrule the prior
Example: IDM with k = 2 =⇒ Imprecise Beta Model
86

Imprecise Beta Model (IBM)I binomial likelihood (observing x successes in n trials)
f (x | θ) =
(nx
)θx(1− θ)n−x
I conjugate Beta priorI with mean y (0) = prior expected probability of successI and prior strength parameter n(0) > 0
f (θ) ∝ θn(0)y (0)−1 (1− θ)n(0)(1−y (0))−1
I informative set of priors: Use the setM(0) of Beta priors withy (0) ∈ [y (0), y (0)] and
I n(0) > 0 fixed, orI n(0) ∈ [n(0), n(0)]
I E (θ | x) = y (n) is a weighted average of E (θ) = y (0) andxn!
I Var (θ | x) =y (n)(1− y (n))
n(n) + 1decreases with n!
87

Imprecise Beta Model (IBM)I binomial likelihood (observing x successes in n trials)
f (x | θ) =
(nx
)θx(1− θ)n−x
I conjugate Beta priorI with mean y (0) = prior expected probability of successI and prior strength parameter n(0) > 0
f (θ) ∝ θn(0)y (0)−1 (1− θ)n(0)(1−y (0))−1
I informative set of priors: Use the setM(0) of Beta priors withy (0) ∈ [y (0), y (0)] and
I n(0) > 0 fixed, orI n(0) ∈ [n(0), n(0)]
I E (θ | x) = y (n) is a weighted average of E (θ) = y (0) andxn!
I Var (θ | x) =y (n)(1− y (n))
n(n) + 1decreases with n!
87

Imprecise Beta Model (IBM)I binomial likelihood (observing x successes in n trials)
f (x | θ) =
(nx
)θx(1− θ)n−x
I conjugate Beta priorI with mean y (0) = prior expected probability of successI and prior strength parameter n(0) > 0
f (θ) ∝ θn(0)y (0)−1 (1− θ)n(0)(1−y (0))−1
I informative set of priors: Use the setM(0) of Beta priors withy (0) ∈ [y (0), y (0)] and
I n(0) > 0 fixed, orI n(0) ∈ [n(0), n(0)]
I E (θ | x) = y (n) is a weighted average of E (θ) = y (0) andxn!
I Var (θ | x) =y (n)(1− y (n))
n(n) + 1decreases with n!
87

Imprecise Beta Model (IBM)I binomial likelihood (observing x successes in n trials)
f (x | θ) =
(nx
)θx(1− θ)n−x
I conjugate Beta priorI with mean y (0) = prior expected probability of successI and prior strength parameter n(0) > 0
f (θ) ∝ θn(0)y (0)−1 (1− θ)n(0)(1−y (0))−1
I informative set of priors: Use the setM(0) of Beta priors withy (0) ∈ [y (0), y (0)] and
I n(0) > 0 fixed, orI n(0) ∈ [n(0), n(0)]
I E (θ | x) = y (n) is a weighted average of E (θ) = y (0) andxn!
I Var (θ | x) =y (n)(1− y (n))
n(n) + 1decreases with n!
87

Imprecise Beta Model with n(0) fixed
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of 16
no conflict:prior n(0) = 8, y (0) ∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hn(n) = 24, y (n) ∈ [0.73, 0.77]
Nprior data conflict:prior n(0) = 8, y (0) ∈ [0.2, 0.3]data s/n = 16/16 = 1
88

Imprecise Beta Model with n(0) fixed
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of 16
no conflict:prior n(0) = 8, y (0) ∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hn(n) = 24, y (n) ∈ [0.73, 0.77]
Nprior data conflict:prior n(0) = 8, y (0) ∈ [0.2, 0.3]data s/n = 16/16 = 1
88

Imprecise Beta Model with n(0) fixed
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of 16
no conflict:prior n(0) = 8, y (0) ∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hn(n) = 24, y (n) ∈ [0.73, 0.77]
N
prior data conflict:prior n(0) = 8, y (0) ∈ [0.2, 0.3]data s/n = 16/16 = 1
88

Imprecise Beta Model with n(0) fixed
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of 16
no conflict:prior n(0) = 8, y (0) ∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hn(n) = 24, y (n) ∈ [0.73, 0.77]
Nprior data conflict:prior n(0) = 8, y (0) ∈ [0.2, 0.3]data s/n = 16/16 = 1
88

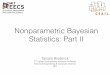
Imprecise Beta Model with n(0) interval
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of16
no conflict:prior n(0)∈ [4, 8], y (0)∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hy (n) ∈ [0.73, 0.77]“spotlight” shape
prior-data conflict:prior n(0)∈ [4, 8], y (0)∈ [0.2, 0.3]data s/n = 16/16 = 1
Hy (n) ∈ [0.73, 0.86]“banana” shape
89

Imprecise Beta Model with n(0) interval
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of16
no conflict:prior n(0)∈ [4, 8], y (0)∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hy (n) ∈ [0.73, 0.77]“spotlight” shape
prior-data conflict:prior n(0)∈ [4, 8], y (0)∈ [0.2, 0.3]data s/n = 16/16 = 1
Hy (n) ∈ [0.73, 0.86]“banana” shape
89

Imprecise Beta Model with n(0) interval
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of16
no conflict:prior n(0)∈ [4, 8], y (0)∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hy (n) ∈ [0.73, 0.77]“spotlight” shape
prior-data conflict:prior n(0)∈ [4, 8], y (0)∈ [0.2, 0.3]data s/n = 16/16 = 1
Hy (n) ∈ [0.73, 0.86]“banana” shape
89

Imprecise Beta Model with n(0) interval
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
)
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
5 10 15 20 25
0.0
0.2
0.4
0.6
0.8
1.0
n(0) resp. n(n)
y(0)resp.y(n
) 12 out of 16
16out
of16
no conflict:prior n(0)∈ [4, 8], y (0)∈ [0.7, 0.8]data s/n = 12/16 = 0.75
Hy (n) ∈ [0.73, 0.77]“spotlight” shape
prior-data conflict:prior n(0)∈ [4, 8], y (0)∈ [0.2, 0.3]data s/n = 16/16 = 1
Hy (n) ∈ [0.73, 0.86]“banana” shape
89

Robust Bayesian Analysis: Other Models
I How to define sets of priorsM(0) is a crucial modeling choiceI SetsM(0) via parameter sets Π(0) seem to work better than
other models discussed in the robust Bayes literature:I Neighbourhood models
I set of distributions ‘close to’ a central distribution P0I example: ε-contamination class:{P : P = (1− ε)P0 + εQ,Q ∈ Q}
I not necessarily closed under Bayesian updating
I Density ratio class / interval of measuresI set of distributions by bounds for the density function f (ϑ):
M(0)l,u =
{f (θ) : ∃c ∈ R>0 : l(θ) ≤ cf (θ) ≤ u(θ)
}
I posterior set is bounded by updated l(θ) and u(θ)I u(θ)/l(θ) is constant under updating
I size of the set does not decrease with nI very vague posterior inferences
90

Robust Bayesian Analysis: Other Models
I How to define sets of priorsM(0) is a crucial modeling choiceI SetsM(0) via parameter sets Π(0) seem to work better than
other models discussed in the robust Bayes literature:I Neighbourhood models
I set of distributions ‘close to’ a central distribution P0I example: ε-contamination class:{P : P = (1− ε)P0 + εQ,Q ∈ Q}
I not necessarily closed under Bayesian updatingI Density ratio class / interval of measures
I set of distributions by bounds for the density function f (ϑ):
M(0)l,u =
{f (θ) : ∃c ∈ R>0 : l(θ) ≤ cf (θ) ≤ u(θ)
}
I posterior set is bounded by updated l(θ) and u(θ)I u(θ)/l(θ) is constant under updating
I size of the set does not decrease with nI very vague posterior inferences
90

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
91

Exercise: Update step in the IBM
Consider first a single Beta prior with parameters n(0) and y (0).
Discuss how E[θ | x ] = y (n) and Var(θ | x) = y (n)(1−y (n))
n(n)+1 behavewhen(i) n(0) → 0, (ii) n(0) →∞, (iii) n→∞ when x/n = const.
What do the results for E[θ | x ] and Var(θ | x) imply for the shapeof f (θ | x)?
When considering a set of Beta priors with
(n(0), y (0)) ∈ Π(0) = [n(0), n(0)]× [y (0), y (0)],
what does the weighted average structure of y (n) tell you about theupdated set of parameters? (Remember the prior-data conflict example!)
92

Exercise: Update step for canonically constructed priorsThe canonically constructed prior for an i.i.d. sample distribitionfrom the canonical exponential family
f (x | ψ) =
(n∏
i=1
h(xi )
)exp{ψT τ(x)− nb(ψ)
}
is given by
f (ψ | n(0), y (0)) ∝ exp{n(0)[ψT y (0) − b(ψ)
]},
and the corresponding posterior by
f (ψ | n(0), y (0), x) ∝ exp{n(n)
[ψT y (n) − b(ψ)
]},
where y (n) =n(0)
n(0) + n· y (0) +
nn(0) + n
· τ(x)
nand n(n) = n(0) + n.
Confirm the expressions for y (n) and n(n).93

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
94

System Reliability Application: Reliability Block Diagrams
1
1
1
1
2 3
Reliability block diagrams:I system consists of components k
(different types k = 1, . . . ,K )I each k either works or notI system works when there is a path
using only working components
We want to learn about the system reliability Rsys(t) = P(Tsys > t)(system survival function)based onI component test data:
nk failure times for components of type k , k = 1, . . . ,KI cautious assumptions on component reliability:
expert information, e.g. from maintenance managers and staff
95

System Reliability Application: Reliability Block Diagrams
1
1
1
1
2 3
Reliability block diagrams:I system consists of components k
(different types k = 1, . . . ,K )I each k either works or notI system works when there is a path
using only working components
We want to learn about the system reliability Rsys(t) = P(Tsys > t)(system survival function)based onI component test data:
nk failure times for components of type k , k = 1, . . . ,KI cautious assumptions on component reliability:
expert information, e.g. from maintenance managers and staff
95

Nonparametric Component Reliability
Functioning probability pkt of k for each time t ∈ T = {t ′1, t ′2, . . .}I discrete component reliability function Rk(t) = pkt , t ∈ T .
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
use Imprecise Beta Model to estimate pkt ’s:
I Set of Beta priors for each pkt :pkt ∼ Beta(n(0)
k,t , y(0)k,t ) with
(n(0)k,t , y
(0)k,t ) ∈ Π
(0)k,t = [n(0)
k,t , n(0)k,t ]× [y (0)
k,t , y(0)k,t ]
M(0)k,t can be near-vacuous by setting [y (0)
k,t , y(0)k,t ] = [0, 1]
M(n)k,t will reflect prior-data conflict for informativeM(0)
k,t
I failure times tk = (tk1 , . . . , tknk ) from component test data:
number of type k components functioning at t:Sk
t | pkt ∼ Binomial(pk
t , nk)
96

Nonparametric Component Reliability
Functioning probability pkt of k for each time t ∈ T = {t ′1, t ′2, . . .}I discrete component reliability function Rk(t) = pkt , t ∈ T .
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
use Imprecise Beta Model to estimate pkt ’s:
I Set of Beta priors for each pkt :pkt ∼ Beta(n(0)
k,t , y(0)k,t ) with
(n(0)k,t , y
(0)k,t ) ∈ Π
(0)k,t = [n(0)
k,t , n(0)k,t ]× [y (0)
k,t , y(0)k,t ]
M(0)k,t can be near-vacuous by setting [y (0)
k,t , y(0)k,t ] = [0, 1]
M(n)k,t will reflect prior-data conflict for informativeM(0)
k,t
I failure times tk = (tk1 , . . . , tknk ) from component test data:
number of type k components functioning at t:Sk
t | pkt ∼ Binomial(pk
t , nk)
96

Nonparametric Component Reliability
Functioning probability pkt of k for each time t ∈ T = {t ′1, t ′2, . . .}I discrete component reliability function Rk(t) = pkt , t ∈ T .
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
use Imprecise Beta Model to estimate pkt ’s:
I Set of Beta priors for each pkt :pkt ∼ Beta(n(0)
k,t , y(0)k,t ) with
(n(0)k,t , y
(0)k,t ) ∈ Π
(0)k,t = [n(0)
k,t , n(0)k,t ]× [y (0)
k,t , y(0)k,t ]
M(0)k,t can be near-vacuous by setting [y (0)
k,t , y(0)k,t ] = [0, 1]
M(n)k,t will reflect prior-data conflict for informativeM(0)
k,t
I failure times tk = (tk1 , . . . , tknk ) from component test data:
number of type k components functioning at t:Sk
t | pkt ∼ Binomial(pk
t , nk)
96

Nonparametric Component Reliability
Functioning probability pkt of k for each time t ∈ T = {t ′1, t ′2, . . .}I discrete component reliability function Rk(t) = pkt , t ∈ T .
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
use Imprecise Beta Model to estimate pkt ’s:
I Set of Beta priors for each pkt :pkt ∼ Beta(n(0)
k,t , y(0)k,t ) with
(n(0)k,t , y
(0)k,t ) ∈ Π
(0)k,t = [n(0)
k,t , n(0)k,t ]× [y (0)
k,t , y(0)k,t ]
M(0)k,t can be near-vacuous by setting [y (0)
k,t , y(0)k,t ] = [0, 1]
M(n)k,t will reflect prior-data conflict for informativeM(0)
k,t
I failure times tk = (tk1 , . . . , tknk ) from component test data:
number of type k components functioning at t:Sk
t | pkt ∼ Binomial(pk
t , nk)
96

Nonparametric Component Reliability
Functioning probability pkt of k for each time t ∈ T = {t ′1, t ′2, . . .}I discrete component reliability function Rk(t) = pkt , t ∈ T .
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ●
● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ●
● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●●
●● ● ● ● ● ● ● ● ●0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0t
p tk
use Imprecise Beta Model to estimate pkt ’s:I Set of Beta priors for each pkt :
pkt ∼ Beta(n(0)
k,t , y(0)k,t ) with
(n(0)k,t , y
(0)k,t ) ∈ Π
(0)k,t = [n(0)
k,t , n(0)k,t ]× [y (0)
k,t , y(0)k,t ]
M(0)k,t can be near-vacuous by setting [y (0)
k,t , y(0)k,t ] = [0, 1]
M(n)k,t will reflect prior-data conflict for informativeM(0)
k,t
I failure times tk = (tk1 , . . . , tknk ) from component test data:
number of type k components functioning at t:Sk
t | pkt ∼ Binomial(pk
t , nk)
96

Component Reliability with Sets of Priors
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = l
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = (0, 1)
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 8][y (0), y (0)] = l
97

Component Reliability with Sets of Priors
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = l
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = (0, 1)
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 8][y (0), y (0)] = l
97

Component Reliability with Sets of Priors
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = l
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 2][y (0), y (0)] = (0, 1)
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
[n(0), n(0)] = [1, 8][y (0), y (0)] = l
97

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7 7 7
11
11
11
11
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7 7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3
3 7 7 7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3
7 7 7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7
7 7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7
7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7 7
7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7 7 7
1
1
1
1
1
1
1
1
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability
I Closed form for the system reliability via the survival signature:
Rsys
(t | ⋃K
k=1{n(0)k,t , y
(0)k,t , t
k}) = P(Tsys > t | · · · )
=
m1∑
l1=0
· · ·mK∑
lK=0
Φ(l1, . . . , lK )K∏
k=1
P(C kt = lk | n(0)
k,t , y(0)k,t , t
k)
Survival signature [8] Φ(l1, . . . , lK ) =
P(system functions | {lk k ’s function}1:K )
l1 l2 l3 Φ
0 0 1 01 0 1 02 0 1 1/33 0 1 14 0 1 1
l1 l2 l3 Φ
0 1 1 01 1 1 02 1 1 2/33 1 1 14 1 1 1
3 3 7 7 7 7
11
11
11
11
2 3
Post. pred. probability thatin a new system, lk of the mk k ’sfunction at time t:(mklk
) ∫[P(T < t | pkt )]lk
[P(T ≥ t | pkt )]mk−lk
f (pkt | n(0)k,t , y
(0)k,t , t
k) dpktI analytical solution for integral:C kt | n(0)
k,t , y(0)k,t ,~t
k ∼Beta-Binom.
98

System Reliability Bounds
I Bounds for Rsys
(t∣∣ K⋃k=1
{n(0)k,t , y
(0)k,t , t
k})
over Π(0)k,t ,
k = 1, . . . ,K :I minRsys(·) by y (0)
k,t = y (0)k,t for any n(0)
k,t[30, Theorem 1]
I minRsys(·) for n(0)k,t or n
(0)k,t according to simple conditions
[30, Theorem 2 & Lemma 3]
I numeric optimization over [n(0)k,t , n
(0)k,t ] in the very few cases
where Theorem 2 & Lemma 3 do not applyI implemented in R package ReliabilityTheory [1]
99

System Reliability Bounds
M H C
P System
0.00
0.25
0.50
0.75
1.00
0.00
0.25
0.50
0.75
1.00
0.0 2.5 5.0 7.5 10.0 0.0 2.5 5.0 7.5 10.0Time
Sur
viva
l Pro
babi
lity
Prior Posterior
M
C1
C2
C3
C4
P1
P2
P3
P4H
100

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
101

Robust Bayesian statistics & applications in reliabilitynetworksOutline
Robust Bayesian Analysis (9am)WhyThe Imprecise Dirichlet ModelGeneral Framework for Canonical Exponential Families
Exercises I (9:30am)
System Reliability Application (10am)
Break (10:30am)
Exercises II (11am)
102

Exercise: Try it yourself!
I Download the development version of the packageReliabilityTheory:library("devtools")install_github("louisaslett/ReliabilityTheory")
(The author is present!)I You can find a How-To in Appendix B (p. 32) of the preprint
paper at https://arxiv.org/abs/1602.01650.I Exercise 1 considers a single component only.I Exercise 2 considers a system with several types of
components.
103

Exercise: Technical HintsI Keeping the number of time points low (e.g., |T | = 50)
keeps computation time short.I Setting lower and upper y (0)
k,t bounds to exactly 0 or 1can lead to errors, use, e.g., 1e-5 and 1-1e-5 instead.
I To use nonParBayesSystemInferencePriorSets() for asingle component, you can set up a system with onecomponent only:onecomp <- graph.formula(s -- 1 -- t)onecomp <- setCompTypes(onecomp , list("A" = 1))onecompss <- computeSystemSurvivalSignature(onecomp)
The component type name is arbitrary, but must be used inthe test.data argument (as test.data is a named list).
I You can use nonParBayesSystemInferencePriorSets() tocalculate the set of prior system reliability functions by settingtest.data = list(A = NULL , B = NULL , C = NULL)
104

Exercise 1: Single Component Reliability Analysis
I Simulate 10 failure times from Gamma(5, 1).I Calculate and graph the (sets of) prior and posterior reliability
functions for. . .(a) a (discrete) precise prior, where the prior expected reliability
values follow 1 - plnorm(t, 1.5, 0.25), and the priorstrength is 5 for all t.
(b) a vacuous set of priors, with prior strength interval [1, 5].(Try out other prior strength intervals! Why is the lower boundirrelevant here?)
(c) a set of priors based on an expert’s opinion that thefunctioning probability is, at time 2, between 0.9 and 0.8, andbetween 0.6 and 0.3 at time 5. Use [1, 2] and [10, 20] for theprior strength interval.
(d) a set of priors, where y (0)k,t follows 1-pgamma(t, 3, 4), y (0)
k,tfollows 1-pgamma(t, 3, 2), and the prior strength interval is[1, 10].
105

Exercise 2: System Reliability Analysis
I Define a system with multiple types of components usinggraph.formula() and setCompTypes(). You can take the‘bridge’ system, the braking system, or invent your own system.
I For prior sets of component reliability functions, you can usethe sets from the previous exercise, or think of your own.
I Simulate test data for the components such that they are,from the viewpoint of the component prior, . . .
I as expected,I surprisingly early,I surprisingly late.
What is the effect on the posterior set of system reliabilityfunctions?
I Vary the sample size and the prior strength interval. What isthe effect on the posterior set of system reliability functions?
106