Embed Size (px)
Citation preview

Computer-Aided Design 43 (2011) 747–755
Contents lists available at ScienceDirect
Computer-Aided Design
journal homepage: www.elsevier.com/locate/cad
Parameterization and applications of Catmull–Rom curvesCem Yuksel ∗, Scott Schaefer, John Keyser3112 Texas A&M University, College Station, TX 77843-3112, United States
a r t i c l e i n f o
Article history:Received 29 January 2010Accepted 23 August 2010
Keywords:Catmull–Rom splinesParameterizationChordal parameterizationCentripetal parameterizationUniform parameterizationAnimation curvesPath curves
a b s t r a c t
The behavior of Catmull–Rom curves heavily depends on the choice of parameter values at the controlpoints. We analyze a class of parameterizations ranging from uniform to chordal parameterization andshow that, within this class, curves with centripetal parameterization contain properties that no othercurves in this family possess. Researchers have previously indicated that centripetal parameterizationproduces visually favorable curves compared to uniform and chordal parameterizations. However, themathematical reasons behind this behavior have been ambiguous. In this paper we prove that, forcubic Catmull–Rom curves, centripetal parameterization is the only parameterization in this family thatguarantees that the curves do not form cusps or self-intersections within curve segments. Furthermore,we provide a formulation that bounds the distance of the curve to the control polygon and explainhow globally intersection-free Catmull–Rom curves can be generated using these properties. Finally, wediscuss two example applications of Catmull–Rom curves and show how the choice of parameterizationmakes a significant difference in each of these applications.
© 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Catmull–Rom curves are widely used in graphics for a varietyof applications ranging from modeling to animation. These para-metric curves have three important properties that make them sopopular. First, the curves are smooth and interpolate their controlpoints, which gives the user direct control over various points onthe curve. Second, the curves have local support, so that each con-trol point only affects a small neighborhood on the curve. Finally,Catmull–Rom curves have an explicit piecewise polynomial repre-sentation, allowing them to be easily converted to other bases andmanipulated computationally.
Perhaps the most popular parameterization of Catmull–Romcurves is a uniform parameterization (i.e. the control points areequally spaced in parametric space). However, this choice of pa-rameterization does not reflect the Euclidean distance betweencontrol points well. For curves with different length segments,this parameterization can lead to artifacts such as cusps and self-intersections, which occur frequently (Fig. 1(a)). Moreover, the dis-tance of the curve from the control polygon can be unbounded,which makes these curves difficult to control in practice.
An alternative is to automatically create the parameterizationof the curve from its geometric embedding in Euclidean space.Doing so gives rise to other known curve parameterizations suchas chordal and centripetal parameterizations (Fig. 1(b) and (c)).
∗ Corresponding author. Tel.: +1 979 845 5534.E-mail address: [email protected] (C. Yuksel).
0010-4485/$ – see front matter© 2010 Elsevier Ltd. All rights reserved.doi:10.1016/j.cad.2010.08.008
However, like uniform parameterization, most parameterizationchoices still produce the same artifacts observed with uniformparameterization (cusps, self-intersections, etc.,).
Researchers have previously compared uniform, chordal, andcentripetal parameterizations for various curves [1–4] and ob-served that, among these three parameterization choices, cen-tripetal parameterization produces visually favorable curves. Yet,the reasoning behind this preference has been limited to informalexplanations based on intuition, rather than a more formal math-ematical explanation. Floater [5] does provide some evidence that,among these three parameterizations, centripetal parameteriza-tion produces curves closer to the control polygon for cubic splinesthan uniform or chordal parameterization. However, centripetalparameterization can be considered as just one choice within aninfinite family of parameterization choices between uniform andchordal. Therefore, there may exist some other parameterizationthat would produce even more favorable results than centripetalparameterization.
In this paper, we concentrate on cubic Catmull–Rom curves andanalyze the full class of parameterizations ranging from uniformto chordal parameterization, such that the parameterization is afunction of the length between two consecutive control points.Weshow that centripetal parameterization, which is at the center ofthis class, inherits some important properties that no other pa-rameterization in this class possesses for these curves. Followinga brief overview of Catmull–Rom curves in Section 2, in Section 3wemathematically prove that centripetal parameterization of Cat-mull–Rom curves guarantees that the curve segments cannot formcusps or local self-intersections, while such undesired featurescan be formed with all other possible parameterizations within

748 C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755
(a) Uniform. (b) Chordal.
(c) Centripetal.
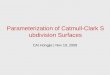
Fig. 1. Cubic Catmull–Rom curves with (a) uniform, (b) chordal, and (c) centripetal parameterization. While uniform and chordal parameterizations can produce self-intersections, centripetal parameterization is the only one that guarantees no self-intersections within curve segments.
a b
c d
Fig. 2. Catmull–Rom curves generated using the same control polygon (a) with different parameterizations. Uniform parameterization (b) overshoots and oftengenerates cusps and intersections within short curve segments, while chord-length parameterization (c) exhibits similar behavior for longer curve segments. Centripetalparameterization (d) is the only one that guarantees no intersections within curve segments.
this class. Furthermore, we provide a formulation that boundsthe distance between the control polygon and the actual curve inSection 4. Based on these two properties we derive rules to achieveglobally intersection-free Catmull–Rom curves in Section 5. InSection 6, we provide a discussion of our results and observations.Finally, we explain the effect of parameterization in two applica-tions of Catmull–Rom curves in Section 7, before we conclude inSection 8.
2. Background
Catmull–Rom curves were first described in [6] as a method forgenerating interpolatory curves with local support by combiningLagrange interpolation and B-spline basis functions. Barry andGoldman [7] exploited this relationship to show how to constructnon-uniform Catmull–Rom curves by factorizing the computationinto a pyramid. Let Pi ∈ Rm be the control points of a Catmull–Romcurve and each control point be associated with the parametricvalue si. A Ck Catmull–Rom curve is composed of polynomialsegments of degree 2k + 1 between consecutive control points.These polynomial pieces are only affected by a local set of control
points. The polynomial piece of the curve between si and si+1 isinfluenced by control points Pi−k through Pi+1+k. Furthermore, thecurve is interpolatory (i.e. at si and si+1, the curve evaluates to Piand Pi+1 respectively).
We concentrate on C1 cubic Catmull–Romcurves as they are thesimplest andmost popular form of these curves. Fig. 3 shows Barryand Goldman’s pyramid algorithm for cubic Catmull–Rom curvesthat builds the polynomial C12(s) for the curve segment betweenparameter values s1 and s2. This pyramid is composed of triangleswith two points at the base and arrowswith coefficients leading toits apex. This notation should be interpreted as multiplying eachpoint at the base of the triangle by the coefficient on the arrow andsumming the result. From this diagram, it is easy to see that C1
Catmull–Rom curves are cubic polynomials as there are 3 levels inthis pyramid and each adds a single, linear factor.
Notice that Barry and Goldman’s description of the Cat-mull–Rom curve is non-uniform and allows for arbitrary si values.The choice of these si is what we refer to as the parameterizationof the Catmull–Rom curve. The behavior of these curves dependssignificantly on the parameterization as shown in Fig. 2. Variousparameterizationmethods have been developed previously [8,4,9]

C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755 749
Fig. 3. Cubic Catmull–Rom curve formulation.
Fig. 4. Control points Bj of the cubic Bézier curve constructed from cubicCatmull–Rom curve segment with control points Pi .
and we analyze a class of parameterizations described by [4] rang-ing from uniform to chordal parameterizationwherewe define theparameter values as
si+1 = |Pi+1 − Pi|α
+ si, (1)
and s0 = 0, where 0 ≤ α ≤ 1. Note that when α = 0, the param-eterization is uniform, and when α = 1, the parameterization be-comes the chordal parameterization. Similarly, α =
12 corresponds
to centripetal parameterization.
3. Cusps and self-intersections
Cusps and self-intersections are very common with Catmull–Rom curves for most parameterization choices. In fact, as we willshow here, the only parameterization choice that guarantees nocusps and self-intersections within curve segments is centripetalparameterization.
To determine if a curve segment of the Catmull–Rom curve hasa self-intersection, we will convert the polynomial to Bézier form.Let P0, P1, P2, P3 be four consecutive control points of theCatmull–Rom curve with parameter values 0, dα
1 , dα2 + dα
1 , dα3 +
dα2 + dα
1 , where di = |Pi − Pi−1| as shown in Fig. 4. The controlpoints of the cubic Bézier curve Bj (j ∈ {0, 1, 2, 3}) representingthis polynomial between dα
1 and dα2 + dα
1 , reparameterized to lie inthe range [0, 1] are then
B0 = P1
B1 =d2α1 P2 − d2α2 P0 + (2d2α1 + 3dα
1dα2 + d2α2 )P1
3dα1 (d
α1 + dα
2 )
B2 =d2α3 P1 − d2α2 P3 + (2d2α3 + 3dα
3dα2 + d2α2 )P2
3dα3 (d
α3 + dα
2 )
B3 = P2.
(2)
A smooth curve will not have cusps or self-intersect on theparameter range [0, 1] if there exists a line such that the curveprojected onto this line has a derivative greater than zero over thatinterval [10]. Our choice of projection will be the line connectingB0 and B3 as this is the only choice that is applicable to curves of alldimensions. Note that this condition with our choice of projectionis both a necessary and sufficient condition for 1D curves (i.e. whenthe Bj are co-linear), and is a necessary but not sufficient conditionfor higher dimensions.
We will first show that parameterizations other than cen-tripetal can produce cusps and self-intersections by analyzing thederivative of the curve at the endpoints.Wewill then show that forcentripetal parameterization, it is not possible to produce cusps orself intersections.
Theorem 1. For parameterizations of cubic Catmull–Rom curvesother than centripetal, the projected derivative may be negative at theend-points.Proof. Given that our curve is a cubic and that the axis we havechosen connects the two end-points of the Bézier curve, we needonly consider the vector B1 − B0 in relationship to our chosen axis(B2−B3 follows through symmetry). Hence if (B1−B0)·(B3−B0) <0, then the projected derivative will begin negative (the directionof the derivative of a Bézier at its end-points is given by the vectorfrom the end-point to the adjacent control point). Expanding thisexpression using Eq. (2) and the property that di = |Pi − Pi−1|,yields
d2α1 d22 − d2α+12 d1 cos(θ)
3dα1 (d
α1 + dα
2 )< 0 (3)
where θ is the angle between P0 − P1 and P2 − P1 as shown inFig. 4. The left-hand side of this inequality achieves its minimumwhen cos(θ) = 1 and the expression simplifies to
d2α1 d2 < d1d2α2 .
When α < 12 , this expression is satisfied when d2 < d1.
When α > 12 , this expression is satisfied when d1 < d2. The
only value of α that cannot meet this inequality is α =12 . Hence,
the centripetal parameterization is the only parameterization forwhich the projected derivative at the endpoint is always non-negative. �
Since the derivative must be positive somewhere for the curveto reach B3 and the derivative is continuous, a negative derivativeat the endpoint implies that a cusp or self intersection can be cre-ated. Thus, centripetal parameterization offers the only possibilityfor avoiding cusps and local self intersections.
This test, however, is not sufficient to show that centripetal pa-rameterization cannot produce cusps within a single polynomial.We will show this property in two stages, first by proving a gen-eral property regarding cusp formation, and then by showing thatcentripetal parameterizationmeets the requirements of that prop-erty.
Theorem 2. A cubic Bézier curvewhose interior control points projectto be within the open interval defined by the end-points of theBézier curve cannot have a cusp or self-intersection.Proof. Since Bézier curves are affinely invariant, we can assumewithout loss of generality that B0 is at the origin and B3 is onthe x-axis at x = 1. The control points for the projected curvewill be univariate values as well and the control points for theprojected Bézier curve are then (0, x1, x2, 1) where x1, x2 are thex components of B1 and B2. Our goal is to show that this projectedcurve cannot have a zero derivative over this interval.
To this end, we construct the control points of the derivative ofthis curve, which is a quadratic Bézier curve with control points(3x1, 3(x2 − x1), 3 − 3x2). Our assumption in the theorem statesthat 0 < x1 < 1 and 0 < x2 < 1. Therefore, there are two cases toconsider: x1 ≤ x2 and x1 > x2.
If x1 ≤ x2, then the control points of the derivative curve are allgreater than or equal to zero and, by the convex hull property ofBézier curves, the derivative is greater than zero.
If x1 > x2, then we can solve for the minimum of this quadraticBézier polynomial, which is
3(x1(1 − x1) + x2(x1 − x2))1 + 3(x1 − x2)
.

750 C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755
Notice that the denominator is always positive, since x1 > x2.Furthermore, x1(1−x1) > 0 because 0 < x1 < 1, and x2(x1−x2) >0 since 0 < x2 and x1 > x2. Therefore, the numerator is alwayspositive as well and the derivative is always greater than zero. �
Theorem 2, assumes that the projection of the interior controlpoints lies in the range (0, 1). We must show this is the case forcentripetal parameterization.
Theorem 3. For centripetal parameterization of cubic Catmull–Romcurves, the interior control points of a cubic Bézier curve may notproject beyond the outer control points.
Proof. We can again consider only the case of B1 (since B2 followsby symmetry). Consider the projected magnitude of B1 − B0 ontothe edge defined by the end-points of the Bézier curve.
(B1 − B0) · (B3 − B0)
|B3 − B0|2
.
If B1 projects onto the open interval defined by B0 and B3, thenthis quantity must be within the range (0, 1). By Theorem 1, thenumerator is non-negative and, hence, this quantity is greater thanor equal to 0. The case when this quantity is equal to 0 correspondstoB1 = B0, which can indeedhappen.However, this boundary casedoes not indicate a cusp as the derivative is only zero exactly at theend-point. Therefore, to apply Theorem 2, we only must show thatthis quantity cannot satisfy
(B1 − B0) · (B3 − B0)
|B3 − B0|2
≥ 1.
Using Eq. (2) and letting r = d1/d2 be the ratio betweenthe lengths of consecutive segments of the control polygon, thisexpression simplifies to
rα− r1−α cos(θ)
3(1 + rα)≥ 1. (4)
This expression will be maximal when cos(θ) = −1. Using thissubstitution and rewriting the expression yields
r1−α≥ 3 + 2rα.
For 12 ≤ α ≤ 1 this expression is obviously false. �
Thus, Theorem 2 guarantees that centripetal parameterizationcannot produce cusps or self-intersections. Theorem 1 shows thatthis is the only parameterization of cubic Catmull–Romcurveswiththat guarantee.
4. Distance bound
A commonly desired property in all of geometric modeling isthat the control structure should provide some intuition about theshape being modeled. One typical way that this is expressed isthat a curve should behave ‘‘similarly’’ to its control polygon. Otherresearchers [5] have also noted that a good interpolatory curve isone that does not deviate far from its control polygon. Thus, wewould like to have a way to measure the possible deviation of acurve from its control polygon.
Consider the curve segment from P1 to P2 with Bézier pointsgiven by Eq. (2). We will bound the distance of this curve to theline segment containing its end-points. To do so, we first bound thedistance of the curve to the infinite line containing its end-pointsas a lower bound to the distance to the line segment itself.
To bound this distance to the infinite line, we first bound thedistance of B1 and B2 to this line. Again, via symmetry, we onlyneed to consider B1’s distance to the infinite line
h1 =
|B1 − B0|
2 −
(B1 − B0) ·
(B3 − B0)
|B3 − B0|
2
=d2α2 d1| sin(θ)|
3(dα1 + dα
2 )dα1.
Substituting r = d1/d2 yields
h1 = d2r1−α
| sin(θ)|
3(1 + rα). (5)
Furthermore, the distance of a cubic Bézier curve to the infiniteline containing its end-points is bounded by 3
4 the distance of itscontrol points to that line. Using this fact and the property that| sin(θ)| ≤ 1, we can bound the distance h of any point on thecurve to the infinite line by
h ≤ d2r1−α
4(1 + rα). (6)
Notice that, for α < 12 , this distance is potentially unbounded
for arbitrary r . That is, for such parameterizations, we cannotbound the distance of the curve from the control polygon. How-ever, for α ≥
12 , this distance will be bounded solely as a fraction
of the length of the edge (independent of r). For example, for bothcentripetal parameterization
α =
12
and chordal parameteriza-
tion (α = 1) the distance of the curve segment to the infinite linecontained by its end-points is no more than 1
4 times the length ofthe edge. The minimal bound (independent of r) is achieved whenα =
23 where the ratio is 1
8 times the length of the edge.While centripetal and chordal parameterizations have similar
bounds to the infinite line segments, they behave very differentlyin practice. For 1
2 ≤ α < 23 , the maximal distance ratio is
achieved for r > 1meaning that the line segmentwe are boundingdistance to is smaller than its adjacent line segments (i.e. d2 isrelatively small). For 2
3 < α ≤ 1, the maximal distance ratio isachieved for r < 1, which is the case in which the line segmentwe are bounding distance to is large in comparison to the adjacentline segments (i.e. d2 is relatively large). Since the bound in Eq.(6) is related to the length of the line segment, d2, the curveusing chordal parameterization will appear farther away from thecontrol polygon than the curve with centripetal parameterization,in absolute distance. In fact, for 1
2 ≤ α ≤23 , the limit curve will
never be farther than 18 the length of the longest line segment in
the control polygon and will typically be smaller. This effect canbe seen in Fig. 2, where the distance of the chordal curve is muchfurther from the control polygon than the centripetal curve.
However, simply bounding the distance of the curve segmentof a Catmull–Rom curve to the infinite line containing its end-points is not sufficient to bound the distance of the curve to the linesegment of the control polygon. When the interior Bézier pointsproject outside of the line segment defined by B0 and B3, we mustconsider the distance of the control point B1 to its closest end-point. Notice that, by the discussion in Section 3, 1
2 ≤ α ≤ 1implied thatB1 will never project outside the interval on the side ofits opposite control point B3. Therefore, we only need to considerthe length of the edge B1 − B0 to bound the distance of the curveto the end-point of the line segment.
We start by computing the angle θ at which the vector B1 − B0becomes perpendicular to B3 − B0. This is the point at which wemust start using the distance l1 to the end-point B0 rather than theinfinite line to bound the distance to the line segment. From theexpression in Eq. (3), we can find that
cos(θ) > r2α−1. (7)
If we compute the length squared of the edge B1 − B0, we obtain
l21 = |B1 − B0|2
=d22(r
2+ r4α − 2 cos(θ)r1+2α)
9r2α(1 + rα)2.

C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755 751
Fig. 5. Bounding volumes for cubic Catmull–Rom curves with different α values. Bounds on the right column are computed using the length of the corresponding segmentonly, so that they represent maximum possible bound for the segment. Bounds on the left column also uses the lengths of neighboring segments using Eqs. (6) and (8);therefore, they are more tight. Note that centripetal parameterization
α =
12
does not need circular bounds at the control points, because the curve is always confined in
the boxes aligned with the edges of the control polygon.
Notice that this equation depends on θ and is larger as cos(θ)decreases. Combining this equationwith the inequality constraintson cos(θ) from Eq. (7) and taking the square root of the expression,we can bound the maximal distance to the end-point as
l1 ≤d2
√r2 − r4α
3rα(1 + rα). (8)
This expression is identically 0 for α =12 meaning that a
Catmull–Rom curve with centripetal parameterization can bebounded solely using bounding boxes extruded in the perpendic-ular direction of its line segments. However, for α = 1, this boundcan be as high as 1
3 the length of the line segment. Therefore, formost curves we need not only bounding boxes around line seg-ments but spheres around vertices to bound the curve completely.Fig. 5 shows a 2D example of such bounding volumes. The figuredemonstrates both the local bounds considering only the length ofthe line segment, as well as tighter bounds achieved by a (less lo-cal) evaluation of the lengths of adjacent segments using Eqs. (6)and (8).
5. Intersection-free curves
Our goal here is to develop criteria that result in intersectionfree Catmull–Rom curves. There are three cases to consider: thelocal casewherewemust avoid cusps and self-intersectionswithina single polynomial, the adjacent case where we consider theintersection between adjacent polynomials, and the global casewhere different polynomial segments not adjacent to one anothermay intersect.
In Section 3 we showed that by using centripetal parameteri-zation we can guarantee that the curve will not contain cusps orself-intersections within curve segments, satisfying the local case.Also, as shown in Section 4, we have a bounding box that defineslimits on the distance of the curve from the corresponding segmentof the control polygon. As long as we use a centripetal parameter-ization and avoid overlapping bounding boxes, the curve will notself-intersect. This satisfies the global case.
Unfortunately, we cannot use the same bounding boxes to dealwith the adjacent case, since bounding boxes of adjacent segmentswill always overlap. Therefore, wemust have an alternativemeansof ensuring that such adjacent segments do not intersect. We dothis by constructing an angular bound on the control polygon of thecurve.
Consider the two Bézier curves in Fig. 6 that have control pointsB10, B
11, B
12, B
13 and B2
0, B21, B
22, B
23 where B1
3 = B20 corresponding
Fig. 6. Bézier control polygons of two neighboring curve segments.
to two different curve segments of the Catmull–Rom curve withcentripetal parameterization. A Bézier curve lies within the convexhull of its control points, hence our intersection criteria will simplyguarantee that the convex hulls do not intersect. Notice that eachconvex hull (shown shaded gray in the figure) contains its end-points. Furthermore, we can exclude the points B1
2 and B21 as they
are necessarily co-linear and will lie on opposite sides of the ‘‘V’’formed by the control polygon.
Therefore, we need only consider the hull formed by B10, B
11, B
13
intersected with the hull formed by B20, B
22, B
23. There are three
cases to consider: B11 and B2
2 both lie on the outside of the ‘‘V’’, B11
is on the inside of the ‘‘V’’ and B22 is on the outside (the symmetric
case follows), and the casewhere both B11 and B2
2 are on the interior(as illustrated in Fig. 6).
For the first case, the portion of the convex hullweneed to avoidintersecting consists only of the edges of the control polygon. Itis not possible to have a self-intersection in such cases, since thecurves are bounded away from each other.
The other two cases are very similar, and so we will analyze theconvex hull for only one side. We will bound the angle γ betweenB11 −B1
3 and B10 −B1
3. First, we compute the length of the projectionof B1
1 − B13 onto B1
0 − B13. Using Eq. (4), this length is given by
d2 − d2r1−α cos(θ)
3 + 3rα.

752 C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755
The ratio involving this length and the distance of B11 to the line
segment formed by B10 and B1
3 will be tan(γ ). Combining thisexpression with Eq. (5) when α =
12 , we obtain
tan(γ ) =
√r| sin(θ)|
3 + 2√r −
√r cos(θ)
.
Maximizing this function we find that γ ≤π6 ; that is, the curve
will extend beyond the control polygon toward the interior of the‘‘V’’ within an angle of π
6 .Therefore, when both B1
1 and B22 are on the interior of the
‘‘V’’, the angle that will guarantee no intersection between adja-cent curve segments is π
3 . This bound, in combination with theglobal intersection test from Section 4, allows us to guarantee anintersection-free Catmull–Rom curve when using centripetal pa-rameterization.
To summarize, we form intersection-free curves as follows:
1. We use a centripetal parameterization to avoid self-interse-ctions within a curve segment.
2. To avoid intersections between adjacent curve segments, werestrict the angular boundof adjacent control polygon segmentsto be greater than π
3 , as described in this section.3. We avoid intersections between other curve segments by not
allowing overlap between bounding boxes for non-adjacentsegments.
6. Discussion
As a result of our theoretical and experimental analysis, we hadseveral observations about Catmull–Rom curves. In this sectionwe discuss some general intuition related to the use of variousparameterizations on Catmull–Rom curves.
Note that all the parameterizations we consider are based onthe distance between control points. Therefore, when all line seg-ments of the control polygon have the same length, all parame-terizations of this family produce the same curve. The differencesbetween parameterization choices appear when the control poly-gon has line segmentswith different lengths. As the differences be-tween the lengths of neighboring segments increase, the differentcharacteristics of the parameterizations are amplified.
6.1. Distance to control polygon
In the previous sections we discussed the upper bound for thedistance between the curve and the corresponding edge of the con-trol polygon. In practice this distance can bemuch smaller than theupper bound. In fact, for uniform parameterization as an edge be-comes larger compared to its neighbors, the curve becomes closerto the edge. A similar behavior happens with chordal parameter-ization for shorter edges, while longer edges push the curve seg-ments of the chordal parameterization closer to the upper bound.In that sense, edge distance behavior of uniform and chordal pa-rameterizations are the opposite of each other. This behavior canbe seen in Fig. 7.
With increasing α values, for shorter edges the curve rapidlydeviates from uniform parameterization and approaches chordalparameterization curve slowly. On the other hand, for longercontrol polygon segments, as α increases, the curve slowlydeviates from uniform parameterization and rapidly approacheschordal parameterization with large values of α. This behavioris demonstrated in Fig. 7. Therefore, the result of centripetalparameterization is relatively closer to uniform parameterizationfor longer edges, and closer to chordal parameterization for shorteredges. As a result, curves with centripetal parameterization arecloser to the control polygon than others when the entire curveis considered.
Fig. 7. Cubic Catmull–Rom curves with parameterization values α ranging from 0to 1. The green curve is α = 0 (uniform), the blue curve is α =
12 (centripetal), the
red curve is α = 1 (chordal), and the gray curves are other values of α between 0and 1 with regular intervals 0.1. (For interpretation of the references to colour inthis figure legend, the reader is referred to the web version of this article.)
6.2. Cusps and self-intersections
Uniform parameterization often produces cusps or self-interse-ctions within curve segments. Even when there are no cusps orintersections, uniform parameterization tends to produce highcurvature points along shorter segments, which are usually unde-sirable in practice.
As α increases, such features become less likely to appear. Aswe show in Section 3, when α > 1
2 cusps or self-intersectionscan only happen when the Catmull–Rom curve overshoots itscontrol points. However, centripetal parameterization is the onlymember of this parameterization family that guarantees no cuspsor self-intersections anywhere within a single Catmull–Rom curvesegment.
6.3. Edge direction
The least favorable property of chordal parameterization isits extreme sensitivity to the direction of control polygon edges.This behavior can be observed near short edges. While the curveswith chordal parameterization are very close to shorter edgesof the control polygon, this makes the curves overshoot whenlonger edges are adjacent to shorter ones. As a result, relativelyminor changes in the position of a control point with a shortedge can drastically alter the shape of the curve with chordalparameterization. This behavior is demonstrated in Fig. 8. Note thatuniform and centripetal parameterizations are not affected nearlyas much.
6.4. Curvature
Cubic Catmull–Rom curves are not curvature continuous andhave curvature discontinuities at the control points. However, thecurvature is continuous within a single curve segment. In our ex-periments, we noticed that centripetal parameterization tends toproduce the highest curvature within a curve segment at one ofits end-points (Catmull–Rom control points). Unfortunately, thisbehavior is not guaranteed, and one can place control points insuch a way as to demonstrate a counterexample. Despite thislack of a guarantee, counter-examples are difficult to find and, inmost cases, the curvature does concentrate at the control points.We demonstrate this behavior in Fig. 9. Note that the controlpoints shown in Fig. 9(b) correspond to local curvature maximain Fig. 9(a). High curvature points generated with other parame-terizations often do not coincide with control points (Fig. 10). Inpractice, this lack of correspondence makes it significantly moredifficult to control these curves to create a desired shape.

C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755 753
Fig. 8. Cubic Catmull–Rom curves with parameterization values α ranging from 0to 1. The green curve is α = 0 (uniform), the blue curve is α =
12 (centripetal), the
red curve is α = 1 (chordal), and the gray curves are other values of α between 0and 1 with regular intervals 0.1. (For interpretation of the references to colour inthis figure legend, the reader is referred to the web version of this article.)
a
b
Fig. 9. (a) A cubic Catmull–Rom curve with centripetal parameterization, (b) thesame curve with its control polygon. Note that control points coincide with localhigh curvature points on the curve.
a
b
Fig. 10. The same control points in Fig. 9 with (a) uniform and (b) chordalparameterizations. Notice that local high curvature points do not coincide with thecontrol points unlike centripetal parameterization in Fig. 9.
7. Applications
Catmull–Rom curves have a wide range of applications, partic-ularly those involving interpolation of control points. The fact thatthey have local support and that they have a polynomial represen-tation also make Catmull–Rom curves preferable over other curveformulations in many settings. In this section we discuss two ap-plication domains for Catmull–Rom curves and present how thechoice of parameterization makes a significant difference in thoseapplications.
7.1. Animation curves
There are several applications, ranging from robotics to com-puter animation, in which a set of parameters x needs to beinterpolated over time. The parameters may be joint angles, po-sitions, or even higher order terms such as velocity. These param-eters are specified at particular points in time, and it is crucial tohave a smooth interpolation of these values. We will refer to theseinterpolations, generally, as animation curves. Borrowing the lan-guage of computer animation, we will refer to the parameters asanimation parameters, and a specific specification of parameters tobe interpolated at a particular time as a key-frame. Catmull–Romcurves are already popular for creating animation curves, but theymay produce highly undesirable results if the parameterization isnot chosen properly.
An animation curve is a function x = F(t), which producesa set of animation parameters x at the given time t . We define aCatmull–Rom spline C(s) to represent the curve F(t) where ourcurve has control points Pi = (ti, xi) defined by the value xiat time ti for the ith key-frame. However, when it comes to theparameterization of the Catmull–Rom curve, we cannot simply usethe Euclidean distance between control points Pi, because x and tin general have different units. Since the Euclidean distance thatcombines two unrelated units is not ameaningful measure, we usethe distances between key-frame times ti and ignore the values xifor parameterization.
In this notation the Catmull–Rom curve C(s) can be written astwo curves, such that x = X(s) and t = T (s). Since we only useti values for building the parameterization si for each key-framepoint, in effect the parameterization is computed for T (s) only andthe same parameterization is used for X(s). Using this notation,
F(t) = X(T−1(t)). (9)
Notice that for T (s) to have an inverse, t = T (s)must be one-to-one and onto over the time range of the animation. In effect (sincethis is a curve in one dimension), we want T (s) to be monotonic.Notice that if T (s) is not monotonic, then the results would bemeaningless in terms of animation, since there would essentiallybe two or more values of x for a given value of t . We ensurethat T (s) meets this criterion by ensuring that the Catmull–Romcurveweuse for representing T (s)does not have self-intersections.We know that for general Catmull–Rom curves, only centripetalparameterization guarantees no self-intersections within a curvesegment. However, animation curves are a special case, becauseeach ti has to be strictly increasing (i.e. ti < ti+1). We thereforeexamine this case in more detail.
For monotonically increasing ti, cos(θ) = −1 in Eq. (3) and soEq. (3) can never be satisfied regardless of the value of α. Hence,the curve T (s) cannot have anegative derivative at its end-points (ifthe derivativewere negative, the curve could not bemonotonicallyincreasing). However, T (s) may have an interior cusp if the curvedoes not meet Theorem 2. Unfortunately, for α ∈
0, 1
2
, Eq. (4)
may be satisfied and an interior cusp may exist, meaning that T (s)is not invertible. This fact implies that building such animationcurves with α < 1
2 is not possible in general.Nevertheless, for α ∈
12 , 1
, monotonic ti imply that a
monotonic curve T (s) and T−1(t)will always exist.Moreover, sinceT (s) is monotonic and interpolates the ti, finding T−1(t) can beperformed via a simple bisection over the parameter interval ti ≤
t ≤ ti+1. Finally, for the special case of chordal parameterization(α = 1), t = T (s) = s since Catmull–Rom curves have linearprecision and the inverse simplifies in Eq. (9).
We are then left with the question of whether any particularparameterizations in the range α ∈
12 , 1
are better than others.
In our experiments with animation curves using various values ofα we observed that as α gets larger, the resulting Catmull–Romcurve deviates further away from the control polygon of the curve

754 C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755
Fig. 11. Chordal (α = 1) and centripetalα =
12
Catmull–Rom curves that
interpolate the same key-frames. The two close-by key-frames in the middle causethe chordal curve to overshoot and highly deviate from the control polygon, whilethe centripetal curve deviates significantly less. The shaded segments of thesecurves are used for driving the animation in Fig. 12.
Fig. 12. Animation of a robot arm comparing the interpolation generated bychordal (α = 1) and centripetal
α =
12
Catmull–Rom curves. The first and
the last two frames are key-frames and the rest are interpolated. This animationcorresponds to the shaded segment of the animation curves in Fig. 11. Notice thatthe interpolation with chordal parameterization highly deviates from user-definedkey-frame poses.
(the straight lines that connect consecutive control points) forsegments that interpolate distant key-frames. This is equivalentto saying that the interpolated animation will deviate more fromthe user-defined key-frame values. This observation is consistentwith our discussions in the previous sections. As the α value getscloser to 1, the resulting animation curve becomes more sensitiveto the direction of control polygon edges that are shorter than theirneighbors. That is, closely-placed key frames will tend to have agreater impact (creating more deviation) on interpolated framesfarther from the key-frames.
Fig. 11 demonstrates this effect by showing animation curvesthat interpolate a set of key-frame values using Catmull–Romcurves with α =
12 and α = 1. As can be seen from this figure,
chordal parameterization (α = 1) produces curves that deviatefurther when interpolating distant key-frames. We also used asegment of these curves to derive an animation of a robot arm,shown in Fig. 12. The interpolated frames in Fig. 12 showhowmuchmore exaggerated the motion is with chordal parameterization ascompared to centripetal parameterization.
7.2. Path curves
Another possible application for Catmull–Rom splines are pathcurves that define the motion path of an object in 3D space.These curves can arise in multiple domains where the position/configuration of a device is specified at certain points. For example,in robotics, probabilistic roadmaps [11] represent a path as con-nected points along a graph, but the paths are typically not smooth.
Catmull–Rom splines provide a simplemethod for creating smoothcurves that follow the discovered path. Likewise, tool path genera-tionmay require a smooth path that interpolates various 3D pointson a machined surface; Catmull–Rom splines can provide such acurve.
Just like animation curves, path curves are also defined by anumber of key-frame positions and the curve must interpolatethese key-frame points. Unlike animation curves, however, pathcurves do not specify time values and geometrically simply repre-sent a curve in the space of animation parameters x.
Loops and self-intersecting curve segments are often unde-sirable path curves. Moreover, key-frames are generally used forrepresenting the extreme positions of a motion. Therefore, it ispreferable that the curve does not overshoot the key-frames. Aswehave shown, only centripetal parameterization of Catmull–Romcurves guarantees these conditions.
When centripetal parameterization is used with Catmull–Romsplines to define a path curve, the direction of motion for theobject following this path will always be towards the next key-frame position. Let P1 and P2 be the two consecutive key-framepositions that a curve segment interpolates. The segment of theCatmull–Rom curve between P1 and P2 is guaranteed to be in thesame direction as the line connecting P1 and P2 (the dot productof the derivative of the curve and P2 − P1 will be positive) whenusing centripetal parameterization. Therefore, the object alwaysmoves from one control point towards the next one and never inthe opposite direction.
Note that when using Catmull–Rom splines for representingpath curves, these curves only represent the shape of the path anddo not provide a positions for a given time t like animation curvesdo. Instead, these curves focus more on the shape of the curve.To provide a desired speed along the curve, we typically mustreparameterize the curve. The natural parameterization of thecurve provided by s will produce a wide range of speeds along thecurve for different values of the parameterization constant α. Thedesired reparameterization of the curvemay not have an analyticalsolution (for example arc-length parameterization); however,most reparameterizations can be easily computed numerically.
8. Conclusion
Our analysis on the parameterization of cubic Catmull–Romcurves demonstrates that centripetal parameterization has specialproperties. In particular, this parameterization was the only pa-rameterization that guaranteed no local self-intersections of thecurve. Furthermore, we created distance bounds of the curve toits control polygon for curves within this parameterization fam-ily. Using these distance bounds, we derived angle constraintson the control polygon that could guarantee Catmull–Rom curveswith centripetal parameterization were globally intersection free.Finally, these properties were valid in general dimension Rm.
Currently, we have only explored C1 Catmull–Rom curves.While these curves are by far the most popular in the familyof Catmull–Rom curves, we have yet to examine higher degreecurves. One important property that is lost with higher degreeCatmull–Rom curves is the lack of local self-intersectionswith cen-tripetal parameterization as we can create cases where this phe-nomenon happens even using C2 Catmull–Rom curves. However,the frequency of such self-intersection seems to be less than withother parameterizations, but it is unclearwhether anything precisecan be said about this propertywhenusing higher order continuity.
Acknowledgement
This work was funded in part by NSF grant CCF-07024099.

C. Yuksel et al. / Computer-Aided Design 43 (2011) 747–755 755
References
[1] Dyn N, FloaterMS, Hormann K. Four-point curve subdivision based on iteratedchordal and centripetal parameterizations. Computer Aided Geometric Design2009;26(3):279–86.
[2] Epstein MP. On the influence of parametrization in parametric interpolation.SIAM Journal on Numerical Analysis 1976;13(2):261–8.
[3] Floater MS, Surazhsky T. Parameterization for curve interpolation. In: Topicsin multivariate approximation and interpolation. 2006. p. 39–54.
[4] Lee ETY. Choosing nodes in parametric curve interpolation. Computer AidedDesign 1989;21(6):363–70.
[5] Floater MS. On the deviation of a parametric cubic spline interpolant from itsdata polygon. Computer Aided Geometric Design 2008;25(3):148–56.
[6] Catmull E, Rom R. A class of local interpolating splines. Computer AidedGeometric Design 1974;317–26.
[7] Barry PJ, Goldman RN. A recursive evaluation algorithm for a class ofCatmull–Rom splines. SIGGRAPH Computer Graphics 1988;22(4):199–204.
[8] Foley TA, Nielson GM. Knot selection for parametric spline interpolation. 1989.p. 261–72.
[9] Nielson G, Foley T. A survey of applications of an affine invariant metric. 1989.p. 445–68.
[10] Manocha D, Canny JF. Detecting cusps and inflection points in curves.Computer Aided Geometric Design 1992;9(1):1–24.
[11] Kavraki LE, Svestka P, Latombe J-C, Overmars M. Probabilistic roadmaps forpath planning in high dimensional configuration spaces. IEEE Transactions onRobotics and Automation 1996;12(4):566–80.











![Approximating Catmull-Clark Subdivision Surfaces with ...faculty.cs.tamu.edu/schaefer/research/acc.pdfCatmull-Clark subdivision surfaces [Catmull and Clark 1978] have become a stan-dard](https://img.pdfslide.us/doc/110x75/5f57008b78885f0b4b07bfc9/approximating-catmull-clark-subdivision-surfaces-with-catmull-clark-subdivision.jpg)