-
8/13/2019 Parallel n Distributed Systems
1/44
-
8/13/2019 Parallel n Distributed Systems
2/44
means by 1!"#, the number of components per integrated circuit
for minimum cost will be$#,.%%
Moore attributed this doubling rate to e#ponential behavior of
die sizes$ finer minimumdimensions$ and 11circuit and device
cleverness)).
In +,2$ he revised this la! as follo!s0
``There is no room left to s&ueeze anything out by being
clever. 'oing forward fromhere we have to depend on the two size
factors ( bigger dies and finer dimensions.%%
3e revised his rate of circuit complexitydoubling to +4 months
and pro5ected from +,2on!ards at this reduced rate.
If one is to bu into Moore)s la!$ the %uestion still remains 6
ho! does one translatetransistors into useful OPS 'operations per
second(7
The logical recourse is to rel on parallelism$ both implicit and
e#plicit.
Most serial 'or seemingl serial( processors rel e#tensivel on
implicit parallelism.
8e focus in this class$ for the most part$ on e#plicit
parallelism.
The Memory/Disk Speed Argument 8hile cloc& rates of high6end
processors have increased at roughl 9:; per ear over the past
decade$"home and ?olding>home.
2
-
8/13/2019 Parallel n Distributed Systems
3/44
In man other applications 'tpicall databases and data mining(
the volume of data issuch that the cannot be moved.
An analses on this data must be performed over the net!or&
using paralleltechni%ues.
#cope of $arallel %omputing &pplications
Parallelism finds applications in ver diverse application
domains for different motivatingreasons.
These range from improved application performance to cost
considerations.
Applications in ngineering and Design "esign of airfoils
'optimizing lift$ drag$ stabilit($ internal combustion engines
'optimizingcharge distribution$ burn($ high6speed circuits 'laouts
for delas and capacitive and inductiveeffects($ and structures
'optimizing structural integrit$ design parameters$ cost$
etc.(.
"esign and simulation of micro6 and nano6scale sstems.
Process optimization$ operations research.
Scienti!ic Applications ?unctional and structural
characterization of genes and proteins.
Advances in computational phsics and chemistr have e#plored ne!
materials$
understanding of chemical path!as$ and more efficient
processes.
Applications in astrophsics have e#plored the evolution of
gala#ies$ thermonuclearprocesses$ and the analsis of e#tremel large
datasets from telescopes.
8eather modeling$ mineral prospecting$ flood prediction$ etc.$
are other importantapplications.
@ioinformatics and astrophsics also present some of the most
challenging problems!ith respect to analzing e#tremel large
datasets.
Commercial Applications Some of the largest parallel computers
po!er the !all street
"ata mining and analsis for optimizing business and
mar&eting decisions.
Barge scale servers 'mail and !eb servers( are often implemented
using parallelplatforms.
Applications such as information retrieval and search are
tpicall po!ered b largeclusters.
Applications in Computer Systems
3
-
8/13/2019 Parallel n Distributed Systems
4/44
et!or& intrusion detection$ crptograph$ multipart
computations are some of the coreusers of parallel computing
techni%ues.
=mbedded sstems increasingl rel on distributed control
algorithms.
A modern automobile consists of tens of processors communicating
to perform comple#
tas&s for optimizing handling and performance. Conventional
structured peer6to6peer net!or&s impose overla net!or&s and
utilizealgorithms directl from parallel computing.
Organi"ation and Contents o! this Course ?undamentals0 This part
of the class covers basic parallel platforms$ principles
ofalgorithm design$ group communication primitives$ and analtical
modeling techni%ues.
Parallel Programming0 This part of the class deals !ith
programming using messagepassing libraries and threads.
Parallel Algorithms0 This part of the class covers basic
algorithms for matri#computations$ graphs$ sorting$ discrete
optimization$ and dnamic programming.
===============xxxxxxxxxxx===============
$arallel %omputing $latforms
'opic Oerie Implicit Parallelism0 Trends in Microprocessor
Architectures Bimitations of Memor Sstem Performance "ichotom of
Parallel Computing Platforms Communication Model of Parallel
Platforms
Phsical Organization of Parallel Platforms Communication Costs
in Parallel Machines Messaging Cost Models and
-
8/13/2019 Parallel n Distributed Systems
5/44
Microprocessor cloc& speeds have posted impressive gains
over the past t!o decades't!o to three orders of magnitude(. 3igher
levels of device integration have made available a large number of
transistors. The %uestion of ho! best to utilize these resources is
an important one. Current processors use these resources in
multiple functional units and e#ecute multiple
instructions in the same ccle. The precise manner in !hich these
instructions are selected and e#ecuted providesimpressive diversit
in architectures.
$ipelining and #uperscalar +ecution Pipelining overlaps various
stages of instruction e#ecution to achieve performance. At a high
level of abstraction$ an instruction can be e#ecuted !hile the ne#t
one is beingdecoded and the ne#t one is being fetched. This is
a&in to an assembl line for manufacture of cars. Pipelining$
ho!ever$ has several limitations. The speed of a pipeline is
eventuall limited b the slo!est stage.
?or this reason$ conventional processors rel on ver deep
pipelines 'D: stage pipelinesin state6of6the6art Pentium
processors(. 3o!ever$ in tpical program traces$ ever 6-th
instruction is a conditional 5ump Thisre%uires ver accurate branch
prediction. The penalt of a misprediction gro!s !ith the depth of
the pipeline$ since a largernumber of instructions !ill have to be
flushed. One simple !a of alleviating these bottlenec&s is to
use multiple pipelines. The %uestion then becomes one of selecting
these instructions.
#uperscalar +ecution: &n +ample
5
=#ample of at!o6!asuperscalare#ecution ofinstructions.
-
8/13/2019 Parallel n Distributed Systems
6/44
In the above e#ample$ there is some !astage of resources due to
data dependencies.
The e#ample also illustrates that different instruction mi#es
!ith identical semantics canta&e significantl different
e#ecution time.
#uperscalar +ecution Scheduling of instructions is determined b
a number of factors0
E True "ata "ependenc0 The result of one operation is an input
to the ne#t.E
-
8/13/2019 Parallel n Distributed Systems
7/44
"ue to limited parallelism in tpical instruction traces$
dependencies$ or the inabilit ofthe scheduler to e#tract
parallelism$ the performance of superscalar processors is
eventualllimited. Conventional microprocessors tpicall support
four6!a superscalar e#ecution.
Very Long "nstruction ,ord (VL",) $rocessors The hard!are cost
and comple#it of the superscalar scheduler is a ma5or
considerationin processor design. To address this issues$ FBI8
processors rel on compile time analsis to identif andbundle
together instructions that can be e#ecuted concurrentl. These
instructions are pac&ed and dispatched together$ and thus the
name ver longinstruction !ord. This concept !as used !ith some
commercial success in the Multiflo! Trace machine'circa +,49(.
Fariants of this concept are emploed in the Intel IA-9
processors.
Very Long "nstruction ,ord (VL",) $rocessors: %onsiderations
Issue hard!are is simpler. Compiler has a bigger conte#t from !hich
to select co6scheduled instructions. Compilers$ ho!ever$ do not
have runtime information such as cache misses.Scheduling is$
therefore$ inherentl conservative. @ranch and memor prediction is
more difficult. FBI8 performance is highl dependent on the
compiler. A number of techni%ues suchas loop unrolling$ speculative
e#ecution$ branch prediction are critical. Tpical FBI8 processors
are limited to 96!a to 46!a parallelism.
Limitations of Memory #ystem $erformance Memor sstem$ and not
processor speed$ is often the bottlenec& for man applications.
Memor sstem performance is largel captured b t!o parameters$ latenc
andband!idth. Batenc is the time from the issue of a memor re%uest
to the time the data is availableat the processor. @and!idth is the
rate at !hich data can be pumped to the processor b the
memorsstem.
Memory #ystem $erformance: -andidt* and Latency It is ver
important to understand the difference bet!een latenc and
band!idth. Consider the e#ample of a fire6hose. If the !ater comes
out of the hose t!o secondsafter the hdrant is turned on$ the
latenc of the sstem is t!o seconds. Once the !ater starts flo!ing$
if the hdrant delivers !ater at the rate of gallonsGsecond$ the
band!idth of the sstem is gallonsGsecond. If ou !ant immediate
response from the hdrant$ it is important to reduce latenc. If ou
!ant to fight big fires$ ou !ant high band!idth.
Memory Latency: &n +ample
7
-
8/13/2019 Parallel n Distributed Systems
8/44
Consider a processor operating at + H3z '+ ns cloc&(
connected to a "
-
8/13/2019 Parallel n Distributed Systems
9/44
"ata reuse is critical for cache performance.
Impact o! Memory 'andwidth Memor band!idth is determined b the
band!idth of the memor bus as !ell as thememor units.
Memor band!idth can be improved b increasing the size of memor
bloc&s. The underling sstem ta&es ltime units '!here lis
the latenc of the sstem( to deliverbunits of data '!here b is the
bloc& size(.
Impact o! Memory 'andwidth# $ample
Consider the same setup as before$ e#cept in this case$ the
bloc& size is 9 !ordsinstead of + !ord. 8e repeat the
dot6product computation in this scenario0
E Assuming that the vectors are laid out linearl in memor$ eight
?BOPs 'four multipl6adds( can be performed in D:: ccles.
E This is because a single memor access fetches four consecutive
!ords in the vector.E Therefore$ t!o accesses can fetch four
elements of each of the vectors. Thiscorresponds to a ?BOP ever D
ns$ for a pea& speed of 9: M?BOPS.
Impact o! Memory 'andwidth It is important to note that
increasing bloc& size does not change latenc of the sstem.
Phsicall$ the scenario illustrated here can be vie!ed as a !ide
data bus '9 !ords or+D4 bits( connected to multiple memor
ban&s. In practice$ such !ide buses are e#pensive to construct.
In a more practical sstem$ consecutive !ords are sent on the memor
bus onsubse%uent bus ccles after the first !ord is retrieved.
Impact o! Memory 'andwidth
The above e#amples clearl illustrate ho! increased band!idth
results in higher pea&computation rates. The data laouts !ere
assumed to be such that consecutive data !ords in memor!ere used b
successive instructions 'spatial localit of reference(. If !e
ta&e a data6laout centric vie!$ computations must be reordered
to enhancespatial localit of reference.
Impact o! Memory 'andwidth# $ampleConsider the follo!ing code
fragment0
for (i = 0; i < 1000; i++)
column_sum[i] = 0.0;
for (j = 0; j < 1000; j++)
column_sum[i] += b[j][i];
The code fragment sums columns of the matri# b into a
vectorcolumn_sum.
Impact o! Memory 'andwidth# $ample The vector column_sumis small
and easil fits into the cache
The matri# bis accessed in a column order.
9
-
8/13/2019 Parallel n Distributed Systems
10/44
The strided access results in ver poor performance.
Impact o! Memory 'andwidth# $ample
8e can fi# the above code as follo!s0for (i = 0; i < 1000;
i++)
column_sum[i] = 0.0;for (j = 0; j < 1000; j++)
for (i = 0; i < 1000; i++)
column_sum[i] += b[j][i];
In this case$ the matri# is traversed in a ro!6order and
performance can be e#pected to besignificantl better.
Memory System Per!ormance# Summary The series of e#amples
presented in this section illustrate the follo!ing concepts0
E =#ploiting spatial and temporal localit in applications is
critical for amortizing memorlatenc and increasing effective memor
band!idth.
E The ratio of the number of operations to number of memor
accesses is a good
indicator of anticipated tolerance to memor band!idth.E Memor
laouts and organizing computation appropriatel can ma&e a
significantimpact on the spatial and temporal localit.
Alternate Approaches !or (iding Memory )atency Consider the
problem of bro!sing the !eb on a ver slo! net!or& connection.
8e deal!ith the problem in one of three possible !as0
10
Multipling a matri# !ith a vector0 'a( multipling
column6b6column$ &eeping a
running sumN 'b( computing each element of the result as a dot
product of aro! of the matri# !ith the vector.
-
8/13/2019 Parallel n Distributed Systems
11/44
E !e anticipate !hich pages !e are going to bro!se ahead of time
and issue re%uests forthem in advanceN
E !e open multiple bro!sers and access different pages in each
bro!ser$ thus !hile !eare !aiting for one page to load$ !e could be
reading othersN or
E !e access a !hole bunch of pages in one go 6 amortizing the
latenc across various
accesses. The first approach is called prefetching$ the second
multithreading$ and the third onecorresponds to spatial localit in
accessing memor !ords.
Multithreading !or )atency (idingA thread is a single stream of
control in the flo! of a program.
8e illustrate threads !ith a simple e#ample0
for (i = 0; i < n; i++)
c[i] = dot_product(get_row(! i)! b);
=ach dot6product is independent of the other$ and therefore
represents a concurrent unit of
e#ecution. 8e can safel re!rite the above code segment as0
for (i = 0; i < n; i++) c[i] =
crete_t"red(dot_product!get_row(! i)! b);
Multithreading !or )atency (iding# $ample In the code$ the first
instance of this function accesses a pair of vector elements
and!aits for them. In the meantime$ the second instance of this
function can access t!o other vectorelements in the ne#t ccle$ and
so on. After l units of time$ !here l is the latenc of the memor
sstem$ the first functioninstance gets the re%uested data from
memor and can perform the re%uired computation. In the ne#t ccle$
the data items for the ne#t function instance arrive$ and so on. In
this!a$ in ever cloc& ccle$ !e can perform a computation.
Multithreading !or )atency (iding The e#ecution schedule in the
previous e#ample is predicated upon t!o assumptions0the memor sstem
is capable of servicing multiple outstanding re%uests$ and the
processor is
capable of s!itching threads at ever ccle. It also re%uires the
program to have an e#plicit specification of concurrenc in the
formof threads. Machines such as the 3=P and Tera rel on
multithreaded processors that can s!itchthe conte#t of e#ecution in
ever ccle. Conse%uentl$ the are able to hide latenc effectivel.
Pre!etching !or )atency (iding Misses on loads cause programs to
stall.
11
-
8/13/2019 Parallel n Distributed Systems
12/44
8h not advance the loads so that b the time the data is actuall
needed$ it is alreadthere The onl dra!bac& is that ou might
need more space to store advanced loads. 3o!ever$ if the advanced
loads are over!ritten$ !e are no !orse than before
Tradeo!!s o! Multithreading and Pre!etching Multithreading and
prefetching are criticall impacted b the memor band!idth.Consider
the follo!ing e#ample0
E Consider a computation running on a machine !ith a + H3z
cloc&$ 96!ord cache line$single ccle access to the cache$ and
+:: ns latenc to "
-
8/13/2019 Parallel n Distributed Systems
13/44
A tpical SIM" architecture 'a( and a tpical MIM" architecture
'b(.
SIMD Processors Some of the earliest parallel computers such as
the Illiac IF$ MPP$ "AP$ CM6D$ andMasPar MP6+ belonged to this
class of machines. Fariants of this concept have found use in
co6processing units such as the MM units inIntel processors and "SP
chips such as the Sharc. SIM" relies on the regular structure of
computations 'such as those in imageprocessing(. It is often
necessar to selectivel turn off operations on certain data items.
?or thisreason$ most SIM" programming paradigms allo! for an
11activit mas&))$ !hich determines ifa processor should
participate in a computation or not.
Conditional $ecution in SIMD Processors
13
-
8/13/2019 Parallel n Distributed Systems
14/44
MIMD Processors In contrast to SIM" processors$ MIM" processors
can e#ecute different programs ondifferent processors. A variant of
this$ called single program multiple data streams 'SPM"( e#ecutes
thesame program on different processors. It is eas to see that SPM"
and MIM" are closel related in terms of programmingfle#ibilit and
underling architectural support. =#amples of such platforms include
current generation Sun ltra Servers$ SHI OriginServers$
multiprocessor PCs$ !or&station clusters$ and the I@M SP.
SIMD*MIMD Comparison SIM" computers re%uire less hard!are than
MIM" computers 'single control unit(. 3o!ever$ since SIM"
processors ae speciall designed$ the tend to be e#pensive andhave
long design ccles. ot all applications are naturall suited to SIM"
processors. In contrast$ platforms supporting the SPM" paradigm can
be built from ine#pensive off6the6shelf components !ith relativel
little effort in a short amount of time.
Communication Model o! Parallel Plat!orms There are t!o primar
forms of data e#change bet!een parallel tas&s 6 accessing
ashared data space and e#changing messages.
Platforms that provide a shared data space are called
shared6address6space machinesor multiprocessors. Platforms that
support messaging are also called message passing platforms
ormulticomputers.
Shared*Address*Space Plat!orms Part 'or all( of the memor is
accessible to all processors. Processors interact b modifing data
ob5ects stored in this shared6address6space.
14
=#ecuting a conditional statement on an SIM" computer !ith four
processors0 'a(
the conditional statementN 'b( the e#ecution of the statement in
t!o steps.
-
8/13/2019 Parallel n Distributed Systems
15/44
If the time ta&en b a processor to access an memor !ord in
the sstem global orlocal is identical$ the platform is classified
as a uniform memor access 'MA($ else$ a non6uniform memor access
'MA( machine.
+,MA and ,MA Shared*Address*Space Plat!orms
+,MA and ,MAShared*Address*Space Plat!orms
The distinction bet!een MA and MA platforms is important from
the point of vie! ofalgorithm design. MA machines re%uire localit
from underling algorithms for performance. Programming these
platforms is easier since reads and !rites are implicitl visible
toother processors. 3o!ever$ read6!rite data to shared data must be
coordinated 'this !ill be discussed ingreater detail !hen !e
tal& about threads programming(.
15
Tpical shared6address6space architectures0 'a( niform6memor
access shared6address6space computerN 'b( niform6memor6access
shared6address6spacecomputer !ith caches and memoriesN 'c(
on6uniform6memor6access shared6address6space computer !ith local
memor onl.
-
8/13/2019 Parallel n Distributed Systems
16/44
Caches in such machines re%uire coordinated access to multiple
copies. This leads tothe cache coherence problem. A !ea&er
model of these machines provides an address map$ but not
coordinatedaccess. These models are called non cache coherent
shared address space machines.
Shared*Address*Space vs- Shared Memory Machines It is important
to note the difference bet!een the terms shared address space
andshared memor. 8e refer to the former as a programming
abstraction and to the latter as a phsicalmachine attribute. It is
possible to provide a shared address space using a phsicall
distributed memor.
Message*Passing Plat!orms These platforms comprise of a set of
processors and their o!n 'e#clusive( memor. Instances of such a
vie! come naturall from clustered !or&stations and
non6shared6address6space multicomputers. These platforms are
programmed using 'variants of( send and receive primitives.
Bibraries such as MPI and PFM provide such primitives.
Message Passing vs- Shared Address Space Plat!orms Message
passing re%uires little hard!are support$ other than a net!or&.
Shared address space platforms can easil emulate message passing.
The reverse ismore difficult to do 'in an efficient manner(.
Physical Organi"ation o! Parallel Plat!orms8e begin this
discussion !ith an ideal parallel machine called Parallel
-
8/13/2019 Parallel n Distributed Systems
17/44
Architecture o! an Ideal Parallel Computer 8hat does concurrent
!rite mean$ an!a7
E Common0 !rite onl if all values are identical.E Arbitrar0
!rite the data from a randoml selected processor.E Priorit0 follo!
a predetermined priorit order.
E Sum0 8rite the sum of all data items.
Physical Comple$ity o! an Ideal Parallel Computer Processors and
memories are connected via s!itches. Since these s!itches must
operate in O1-time at the level of !ords$ for a sstem ofpprocessors
and m!ords$ the s!itch comple#it is Omp-. Clearl$ for meaningful
values ofpand m$ a true P
-
8/13/2019 Parallel n Distributed Systems
18/44
Interconnection +etworks S!itches map a fi#ed number of inputs
to outputs. The total number of ports on a s!itch is the degreeof
the s!itch. The cost of a s!itch gro!s as the s%uare of the degree
of the s!itch$ the peripheralhard!are linearl as the degree$ and
the pac&aging costs linearl as the number of pins.
Interconnection +etworks# +etwork Inter!aces Processors tal&
to the net!or& via a net!or& interface. The net!or&
interface ma hang off the IGO bus or the memor bus. In a phsical
sense$ this distinguishes a cluster from a tightl coupled
multicomputer. The relative speeds of the IGO and memor buses
impact the performance of thenet!or&.
+etwork Topologies A variet of net!or& topologies have been
proposed and implemented. These topologies tradeoff performance for
cost. Commercial machines often implement hbrids of multiple
topologies for reasons ofpac&aging$ cost$ and available
components.
+etwork Topologies# 'uses Some of the simplest and earliest
parallel machines used buses.
All processors access a common bus for e#changing data. The
distance bet!een an t!o nodes is O1- in a bus. The bus also
provides aconvenient broadcast media. 3o!ever$ the band!idth of the
shared bus is a ma5or bottlenec&. Tpical bus based machines are
limited to dozens of nodes. Sun =nterprise servers andIntel Pentium
based shared6bus multiprocessors are e#amples of such
architectures.
+etwork Topologies# 'uses
18
-
8/13/2019 Parallel n Distributed Systems
19/44
@us6based interconnects 'a( !ith no local cachesN 'b( !ith local
memorGcaches.
Since much of the data accessed b processors is local to the
processor$ a localmemor can improve the performance of bus6based
machines.
+etwork Topologies# Cross.ars
19
A completel non6bloc&ing crossbar net!or& connectingp
processors to bmemor ban&s.
A crossbar net!or& uses anp)mgrid of s!itches to connectp
inputs to moutputs in a non6bloc&ing manner.
-
8/13/2019 Parallel n Distributed Systems
20/44
+etwork Topologies# Cross.ars The cost of a crossbar
ofpprocessors gro!s as Op*-. This is generall difficult to scale
for large values ofp. =#amples of machines that emplo crossbars
include the Sun ltra 3PC +:::: and the?u5itsu FPP::.
+etwork Topologies# Multistage +etworks Crossbars have e#cellent
performance scalabilit but poor cost scalabilit. @uses have
e#cellent cost scalabilit$ but poor performance scalabilit.
Multistage interconnects stri&e a compromise bet!een these
e#tremes.
etor/ 'opologies: Multistage etor/s
The schematic of a tpical multistage interconnection
net!or&
20
-
8/13/2019 Parallel n Distributed Systems
21/44
+etwork Topologies# Multistage Omega +etwork
One of the most commonl used multistage interconnects is the
Omega net!or&. This net!or& consists of log pstages$
!herepis the number of inputsGoutputs. At each stage$ input iis
connected to output if0
+etwork Topologies# Multistage Omega +etwork
=ach stage of the Omega net!or& implements a perfect shuffle
as follo!s0
A perfect shuffle interconnection for eight inputs and
outputs.
+etwork Topologies# Multistage Omega +etwork The perfect shuffle
patterns are connected using DKD s!itches.
The s!itches operate in t!o modes E crossover or
passthrough.
21
-
8/13/2019 Parallel n Distributed Systems
22/44
T!o s!itching configurations of the D K D s!itch0'a(
Pass6throughN 'b( Cross6over.
+etwork Topologies# Multistage Omega +etwork
A complete Omega net!or& !ith the perfect shuffle
interconnects and s!itches can no! beillustrated0
A complete omega net!or& connecting eight inputs and eight
outputs.An omega net!or& has p/* ) log ps!itching nodes$ and
the cost of such a net!or&
gro!s as p log p-.
+etwork Topologies# Multistage Omega +etwork 0outing Bet s be
the binar representation of the source and d be that of the
destinationprocessor.
22
-
8/13/2019 Parallel n Distributed Systems
23/44
The data traverses the lin& to the first s!itching node. If
the most significant bits of sanddare the same$ then the data is
routed in pass6through mode b the s!itch else$ it s!itches
tocrossover. This process is repeated for each of the log
ps!itching stages. ote that this is not a non6bloc&ing
s!itch.
+etwork Topologies# Multistage Omega +etwork 0outing
An e#ample of bloc&ing in omega net!or&0 one of the
messages':+: to +++ or ++: to +::( is bloc&ed at lin&
A@.
+etwork Topologies# Completely Connected +etwork =ach processor
is connected to ever other processor. The number of lin&s in
the net!or& scales as Op*-. 8hile the performance scales ver
!ell$ the hard!are comple#it is not realizable forlarge values ofp.
In this sense$ these net!or&s are static counterparts of
crossbars.
23
-
8/13/2019 Parallel n Distributed Systems
24/44
+etwork Topologies# Completely Connected and Star Connected
+etworks
=#ample of an 46node completel connected net!or&.
'a( A completel6connected net!or& of eight nodesN
'b( a star connected net!or& of nine nodes.
+etwork Topologies# Star Connected +etwork
=ver node is connected onl to a common node at the center.
"istance bet!een an pair of nodes is O1-.3o!ever$ the central node
becomes abottlenec&. In this sense$ star connected net!or&s
are static counterparts of buses.
+etwork Topologies# )inear Arrays1 Meshes1 and k-dMeshes
In a linear arra$ each node has t!o neighbors$ one to its left
and one to its right. If thenodes at either end are connected$ !e
refer to it as a +6" torus or a ring. A generalization to D
dimensions has nodes !ith 9 neighbors$ to the north$ south$
east$and !est. A further generalization to ddimensions has nodes
!ith *dneighbors. A special case of a d6dimensional mesh is a
hpercube. 3ere$ d 0 log p$ !herepis thetotal number of nodes.
+etwork Topologies# )inear Arrays
24
-
8/13/2019 Parallel n Distributed Systems
25/44
Binear arras0 'a( !ith no !raparound lin&sN 'b( !ith
!raparound lin&.
+etwork Topologies# Two* and Three Dimensional Meshes
T!o and three dimensional meshes0 'a( D6" mesh !ith no
!raparoundN 'b( D6" mesh !ith!raparound lin& 'D6" torus(N and
'c( a 6" mesh !ith no !raparound.
+etwork Topologies# (ypercu.es and their Construction
25
-
8/13/2019 Parallel n Distributed Systems
26/44
Construction of hpercubes from hpercubes of lo!er dimension.
+etwork Topologies# Properties o! (ypercu.es
The distance bet!een an t!o nodes is at most log p. =ach node
has log pneighbors. The distance bet!een t!o nodes is given b the
number of bit positions at !hich thet!o nodes differ.
+etwork Topologies# Tree*'ased +etworks
Complete binar tree net!or&s0 'a( a static tree net!or&N
and 'b( a dnamic tree net!or&.
+etwork Topologies# Tree Properties The distance bet!een an t!o
nodes is no more than *logp.
26
-
8/13/2019 Parallel n Distributed Systems
27/44
Bin&s higher up the tree potentiall carr more traffic than
those at the lo!er levels. ?or this reason$ a variant called a
fat6tree$ fattens the lin&s as !e go up the tree. Trees can be
laid out in D" !ith no !ire crossings. This is an attractive
propert oftrees.
+etwork Topologies# 2at Trees
A fat tree net!or& of +- processing nodes
valuating Static Interconnection +etworks iameter2The distance
bet!een the farthest t!o nodes in the net!or&. The diameter
of
a linear arra isp
1$ that of a mesh is *
1-,that of a tree and hpercube is log p$ andthat of a completel
connected net!or& is O1-. 3isection 4idth2The minimum number of
!ires ou must cut to divide the net!or& intot!o e%ual parts.
The bisection !idth of a linear arra and tree is 1$ that of a mesh
is $ that ofa hpercube isp/* and that of a completel connected
net!or& is pDG9. Cost2 The number of lin&s or s!itches
'!hichever is asmptoticall higher( is ameaningful measure of the
cost. 3o!ever$ a number of other factors$ such as the abilit
tolaout the net!or&$ the length of !ires$ etc.$ also factor in
to the cost.
27
-
8/13/2019 Parallel n Distributed Systems
28/44
valuating Static Interconnection +etworks
valuating Dynamic Interconnection +etworks
28
8raparound 56ar d6cube
3percube
D6" !raparound mesh
D6" mesh$ no !raparound
Binear arra
Complete binar tree
Star
Completel6connected
Cost'o. oflin&s(
ArcConnectivit
@isection8idth
"iameteret!or&
-
8/13/2019 Parallel n Distributed Systems
29/44
Cache Coherence in Multiprocessor Systems
Interconnects provide basic mechanisms for data transfer. In the
case of shared address space machines$ additional hard!are is
re%uired tocoordinate access to data that might have multiple
copies in the net!or&. The underling techni%ue must provide
some guarantees on the semantics. This guarantee is generall one of
serializabilit$ i.e.$ there e#ists some serial order ofinstruction
e#ecution that corresponds to the parallel schedule.
8hen the value of a variable is changes$ all its copies must
either be invalidated or updated.
Cache coherence in multiprocessor sstems0 'a( Invalidate
protocolN 'b( pdate protocol for shared variables
29
"namic Tree
Omega et!or&
Crossbar
Cost'o. oflin&s(
ArcConnectivit
@isection8idth
"iameteret!or&
-
8/13/2019 Parallel n Distributed Systems
30/44
Cache Coherence# ,pdate and Invalidate Protocols If a processor
5ust reads a value once and does not need it again$ an update
protocolma generate significant overhead. If t!o processors
ma&e interleaved test and updates to a variable$ an update
protocol isbetter.
@oth protocols suffer from false sharing overheads 't!o !ords
that are not shared$ho!ever$ the lie on the same cache line(. Most
current machines use invalidate protocols.
Maintaining Coherence ,sing Invalidate Protocols =ach cop of a
data item is associated !ith a state.
One e#ample of such a set of states is$ shared$ invalid$ or
dirt. In shared state$ there are multiple valid copies of the data
item 'and therefore$ aninvalidate !ould have to be generated on an
update(. In dirt state$ onl one cop e#ists and therefore$ no
invalidates need to be generated. In invalid state$ the data cop is
invalid$ therefore$ a read generates a data re%uest 'andassociated
state changes(.
Maintaining Coherence ,sing Invalidate Protocols
State diagram of a simple three6state coherence protocol.
30
-
8/13/2019 Parallel n Distributed Systems
31/44
Maintaining Coherence ,sing Invalidate Protocols
=#ample of parallel program e#ecution !ith the simple
three6state coherence protocol.
Snoopy Cache Systems3o! are invalidates sent to the right
processors7In snoop caches$ there is a broadcast media that listens
to all invalidates and read re%uestsand performs appropriate
coherence operations locall.
31
-
8/13/2019 Parallel n Distributed Systems
32/44
A simple snoop bus based cache coherence sstem
Per!ormance o! Snoopy Caches Once copies of data are tagged
dirt$ all subse%uent operations can be performedlocall on the cache
!ithout generating e#ternal traffic. If a data item is read b a
number of processors$ it transitions to the shared state in
thecache and all subse%uent read operations become local. If
processors read and update data at the same time$ the generate
coherence re%uestson the bus 6 !hich is ultimatel band!idth
limited.
Directory 'ased Systems In snoop caches$ each coherence
operation is sent to all processors. This is aninherent limitation.
8h not send coherence re%uests to onl those processors that need to
be notified7 This is done using a director$ !hich maintains a
presence vector for each data item'cache line( along !ith its
global state.
Directory 'ased Systems
32
-
8/13/2019 Parallel n Distributed Systems
33/44
Architecture of tpical director based sstems0 'a( a centralized
directorN and 'b( a distributeddirector.
Per!ormance o! Directory 'ased Schemes The need for a broadcast
media is replaced b the director. The additional bits to store the
director ma add significant overhead. The underling net!or&
must be able to carr all the coherence re%uests. The director is a
point of contention$ therefore$ distributed director schemes must
beused.
Communication Costs in Parallel Machines Along !ith idling and
contention$ communication is a ma5or overhead in parallelprograms.
The cost of communication is dependent on a variet of features
including the
programming model semantics$ the net!or& topolog$ data
handling and routing$ andassociated soft!are protocols.
Message Passing Costs in Parallel Computers The total time to
transfer a message over a net!or& comprises of the
follo!ing0
E 6tartup time 'ts(0 Time spent at sending and receiving nodes
'e#ecuting the routing algorithm$programming routers$ etc.(.
E 7er(hop time 'th(0 This time is a function of number of hops
and includes factors such as s!itchlatencies$ net!or& delas$
etc.
E 7er(word transfer time 'tw(0 This time includes all overheads
that are determined b the length ofthe message. This includes
band!idth of lin&s$ error chec&ing and correction$ etc.
Store*and*2orward 0outing A message traversing multiple hops is
completel received at an intermediate hopbefore being for!arded to
the ne#t hop. The total communication cost for a message of size m
!ords to traverse lcommunication lin&s is
In most platforms$ this small and the above e#pression can be
appro#imated b
33
-
8/13/2019 Parallel n Distributed Systems
34/44
0outing Techni3ues
34
-
8/13/2019 Parallel n Distributed Systems
35/44
Passing a message from node 7 to 7+ 'a( through a
store6and6for!ard communication
net!or&N 'b( and 'c( e#tending the concept to cut6through
routing. The shaded regionsrepresent the time that the message is
in transit. The startup time associated !ith thismessage transfer
is assumed to be zero.
Packet 0outing Store6and6for!ard ma&es poor use of
communication resources. Pac&et routing brea&s messages
into pac&ets and pipelines them through the net!or&. Since
pac&ets ma ta&e different paths$ each pac&et must carr
routing information$error chec&ing$ se%uencing$ and other
related header information. The total communication time for
pac&et routing is appro#imated b0
The factor twaccounts for overheads in pac&et headers.
Cut*Through 0outing Ta&es the concept of pac&et routing
to an e#treme b further dividing messages into
basic units called flits. Since flits are tpicall small$ the
header information must be minimized. This is done b forcing all
flits to ta&e the same path$ in se%uence. A tracer message
first programs all intermediate routers. All flits then ta&e
the sameroute. =rror chec&s are performed on the entire
message$ as opposed to flits. o se%uence numbers are needed.
Cut*Through 0outing The total communication time for cut6through
routing is appro#imated b0
This is identical to pac&et routing$ ho!ever$ twis tpicall
much smaller.
Simpli!ied Cost Model !or Communicating Messages
35
-
8/13/2019 Parallel n Distributed Systems
36/44
The cost of communicating a message bet!een t!o nodes l hops a!a
using cut6through routing is given b
In this e#pression$ this tpicall smaller thantsand tw. ?or this
reason$ the second termin the
-
8/13/2019 Parallel n Distributed Systems
37/44
-
8/13/2019 Parallel n Distributed Systems
38/44
m.edding a )inear Array into a (ypercu.eThe function 'is called
the binary reflected 'ray code '
-
8/13/2019 Parallel n Distributed Systems
39/44
'a( A three6bit reflected Hra code ringN and 'b( its embedding
into a three6dimensionalhpercube
m.edding a Mesh into a (ypercu.e A DrK Ds!raparound mesh can be
mapped to a D rs6node hpercube b mapping nodei, - of the mesh onto
node 'i, r +- QQ ', s 1- of the hpercube '!here QQ
denotesconcatenation of the t!o Hra codes(.
m.edding a Mesh into a (ypercu.e
39
-
8/13/2019 Parallel n Distributed Systems
40/44
'a( A 9 K 9 mesh illustrating the mapping of mesh nodes to the
nodes in a four6dimensionalhpercubeN and 'b( a D K 9 mesh embedded
into a three6dimensional hpercube.
Once again$ the congestion$ dilation$ and e#pansion of the
mapping is +.
m.edding a Mesh into a )inear Array Since a mesh has more edges
than a linear arra$ !e !ill not have an optimalcongestionGdilation
mapping. 8e first e#amine the mapping of a linear arra into a mesh
and then invert thismapping. This gives us an optimal mapping 'in
terms of congestion(.
m.edding a Mesh into a )inear Array# $ample
40
-
8/13/2019 Parallel n Distributed Systems
41/44
'a( =mbedding a +- node linear arra into a D6" meshN and 'b( the
inverse of the mapping.Solid lines correspond to lin&s in the
linear arra and normal lines to lin&s in the mesh.
m.edding a (ypercu.e into a 5*D Mesh =ach node subcube of the
hpercube is mapped to a node ro! of the mesh. This is done b
inverting the linear6arra to hpercube mapping. This can be sho!n to
be an optimal mapping.
m.edding a (ypercu.e into a 5*D Mesh# $ample
Case Studies#The I'M 'lue*4ene Architecture
41
-
8/13/2019 Parallel n Distributed Systems
42/44
Case Studies#
The Cray T6 Architecture
Interconnection net!or& of the Cra T=0
'a( node architectureN 'b( net!or& topolog.
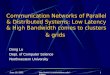
Case Studies#The S4I Origin 6777 Architecture
42
The hierarchicalarchitecture of@lue Hene.
-
8/13/2019 Parallel n Distributed Systems
43/44
Architecture of the SHI Origin ::: famil of servers
Case Studies#The Sun (PC Server Architecture
43
-
8/13/2019 Parallel n Distributed Systems
44/44
Architecture of the Sun =nterprise famil of servers