Upload buinguyet
View 230
Download 0
Embed Size (px) 344 x 292 429 x 357 514 x 422 599 x 487
Citation preview
forward kinematics: the denavit-hartenberg convention
FORWARD KINEMATICS: DENAVIT-HARTENBERG CONVENTION · DENAVIT-HARTENBERG CONVENTION ... the relationship between the individual joints of the robot manipulator and the position …
Kinematics - Seoul National Universitymrl.snu.ac.kr/.../ComputerAnimationLectureNote/5_Kinematics.pdf · Forward Kinematics: A Simple Example • Forward kinematics map as a coordinate
Forward Kinematics - TU Chemnitz
Forward Kinematics and Configurations
CSCE 641: Forward kinematics and inverse kinematics Jinxiang Chai
More details and examples on robot arms and kinematics Denavit-Hartenberg Notation
Industrial Robots : Manipulators, Kinematics, · PDF fileThe Denavit-Hartenberg Notation Matrix ... Denavit-Hartenberg Matrix is a transformation matrix from one coordinate frame to
Kinematics Forward Kinematic - pku.edu.cn
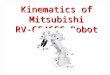
Kinematics of Mitsubishi RV-6S/6SC Robot. Kinematic model of Mitsubishi RV-6S/6SC ( Denavit-Hartenberg convention ) R. S. Hartenberg and J. Denavit, “A
Ch.05 Forward Kinematics
InTech-Robot Kinematics Forward and Inverse Kinematics
Kinematics - prisma.unina.it · Prof.Fanny Ficuciello Robotics for Bioengineering • Kinematics The Denavit–Hartenberg convention gives a nonunique definition of the link frame
Modeling and Control of 2-DOF Robot Arm - IJEERT · Kinematics with Denavit-Hartenberg parameters (DH)for Forward kinematics and Inverse Kinematicsof 2-DOF robot armwere presented
Chap3 Forward Kinematics
FORWARD KINEMATICS: THE DENAVIT-HARTENBERG
Chapter4 Forward Kinematics for Position
Kinematics of Serial Manipulators - Semantic Scholardescribed using the well-known Denavit-Hartenberg (D-H) parameters. Two well-known problems, namely the direct and inverse kinematics
Chapter 3 - Forward Kinematics: the Denavit-Hartenberg Convention
On robot modelling using Maple - Automatic control · Denavit-Hartenberg representation, forward kinematics, Jabcobian. Avdelning, Institution Division, Department ... On robot modelling
Forward Kinematics
NAVAL POSTGRADUATE SCHOOLwork and expose students to forward kinematics via Denavit-Hartenberg (DH) ... Consequently, with a 6DOF arm, we find six links and six - joints. The joints
Forward Kinematics and Jacobians
Lecture 5: inverse kinematics. The local and world matrix construction within the skeleton is an implementation of forward kinematics Forward kinematics
Kinematics – Frame Assignment using Denavit-Hartenberg Convention
Kinematics of Robot Manipulator 1. Examples of Kinematics Calculations Forward Forward kinematics Given joint variables End-effector position and orientation,
Forward Kinematics for Position
Robot Kinematics - Intranet DEIBhome.deib.polimi.it/restelli/MyWebSite/pdf/kinematics.pdf · Kinematics studies the relation between the independent ... Denavit-Hartenberg Notation
lecture 10 forward kinematics - publish.illinois.edupublish.illinois.edu/ece470-intro-robotics/files/2020/02/... · 2020-02-26 · What is Forward Kinematics? •Kinematics: a branch
CPSC 441: Forward kinematics and inverse kinematics