Embed Size (px)
Citation preview

P16462: Wind Energy Base Station Sub-system Design Review
Agenda ● Team Structure ● Flights ● Operating Conditions lead to Design Parameters ● Design Deliberation
○ Base Structure ○ Reel Structure ○ Tether and Bridle System ○ Motor Selection ○ Transmitter Improvements
● Program Planning ○ Risks ○ Finances ○ Future
Comments, advice, and questions are strongly encouraged. Please allow each individual presenter to complete their delivery before asking them questions. Your attendance and participation are greatly appreciated. We hope you enjoy this presentation.

System Operating Conditions Additional Simulation Outputs

Base Design
Overall Design
1: Base Plate

2: Tower Structure
Ring Deflection Table of Values

3: Ring
E Values, Moment of Inertia Equation, Example Deflection Calculation

First Draft of Base Design
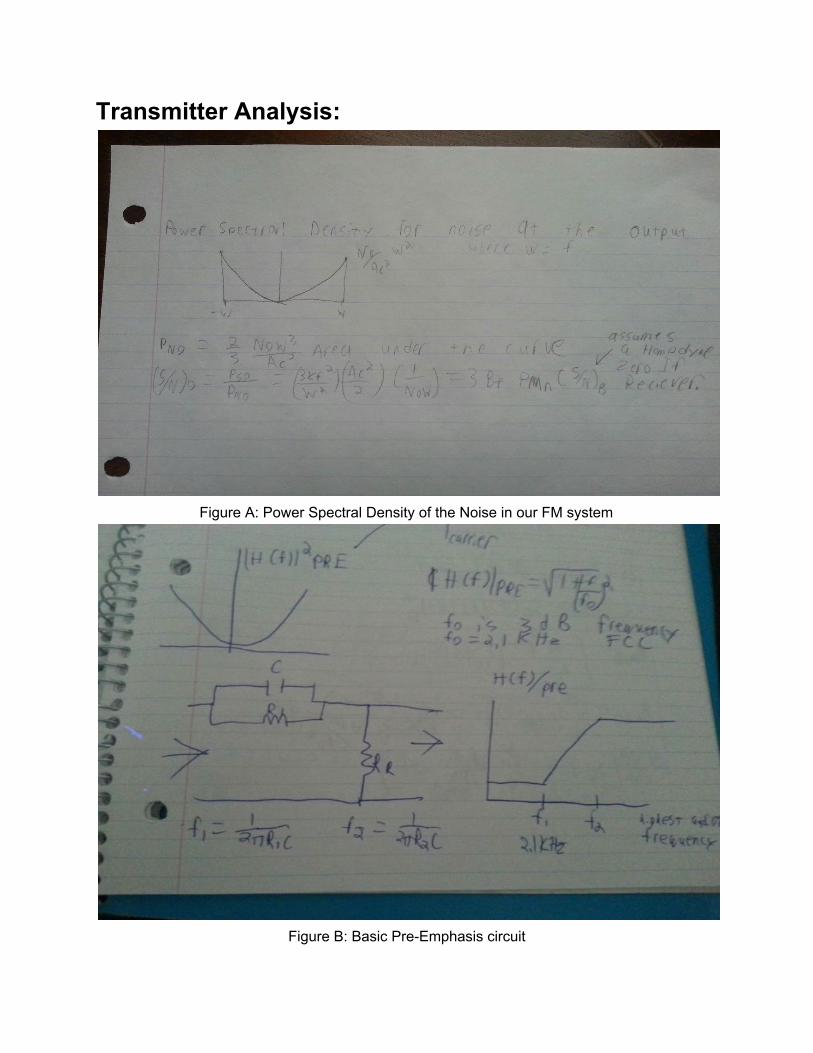
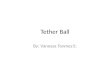
Transmitter Analysis:
Figure A: Power Spectral Density of the Noise in our FM system
Figure B: Basic PreEmphasis circuit

Figure C: Basic DeEmphasis circuit
Figure D: Results of the Transmitter test
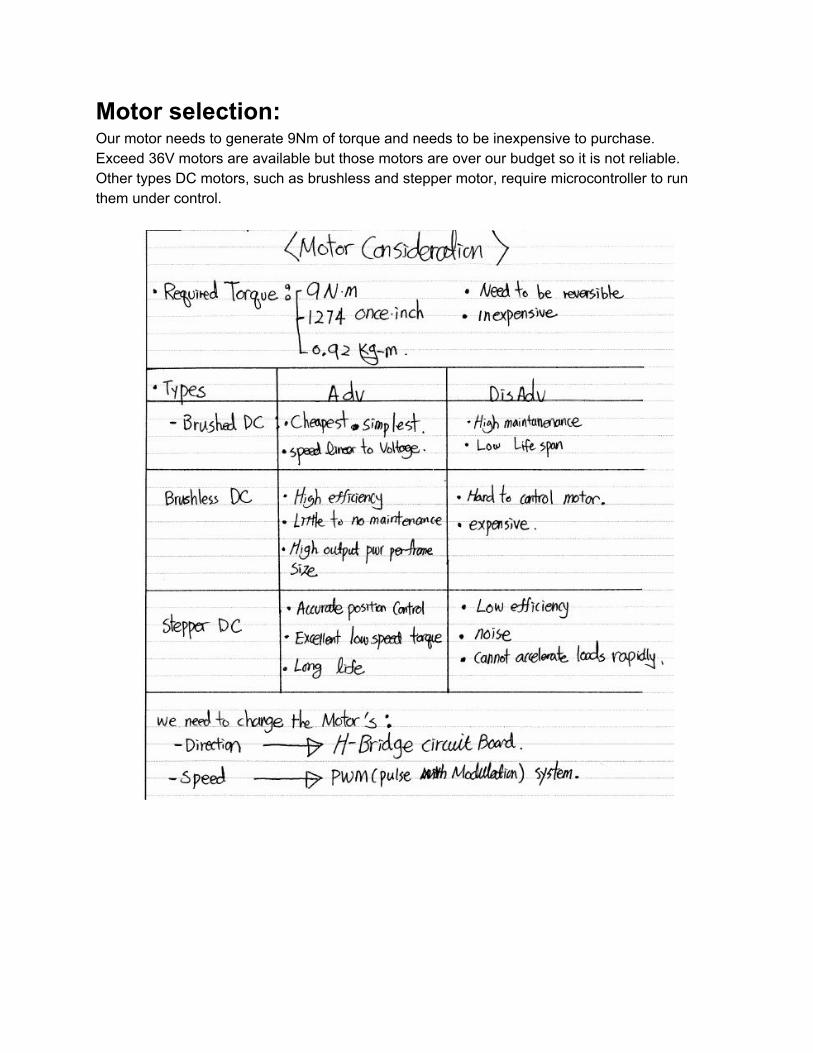
Motor selection: Our motor needs to generate 9Nm of torque and needs to be inexpensive to purchase. Exceed 36V motors are available but those motors are over our budget so it is not reliable. Other types DC motors, such as brushless and stepper motor, require microcontroller to run them under control.

Changing in direction of motor can be controlled by HBridge system. this HBridge system has wide range of voltage input and if we have a range of required power, our EE team can make one for our motor. This Hbridge requires:
4 of transistors( for control electical signals) 4 of resistors ( regulate the current flows) 4 of diode( for control direction) 2 switches( for control voltage flow).