Embed Size (px)
Citation preview

P J Smith University of Sheffield 1
MICE TargetElectronics
Paul J SmithUniversity of Sheffield
Fermilab 10th June 2006

P J Smith University of Sheffield 2
Presentation Overview
•Actuator Details
•Target Position Monitoring
•Control System
•Power Electronics
•DAQ (Briefly)
•Future Work/Conclusions

P J Smith University of Sheffield 3
Actuator Details•Composed of 24 stacked coils each ~3mm thick
•From the ‘electronics’ point of view it can be effectively be though of as 4 units of 6 coils
A AA’ A’B’ B’B BC CC’ C’
A AA’ A’B’ B’B BC CC’ C’
•The device can be driven in a similar fashion to a three phase rotary motor

P J Smith University of Sheffield 4
A AA’ A’B’ B’B BC CC’ C’
A AA’ A’B’ B’B BC CC’ C’
1 2 3
4A 4B 4C
4C'4B'4A'
.
•Presently all coils are wired in series as a single ‘bank’
•The shuttle can be driven in two modes
- On Phase
Here, accurately knowing the position of the shuttle is critical
- Off Phase
A AA’ A’B’ B’B BC CC’ C’
A AA’ A’B’ B’B BC CC’ C’

P J Smith University of Sheffield 5
A AA’ A’B’ B’B BC CC’ C’
A AA’ A’B’ B’B BC CC’ C’
2A 2B 2C
2C'2B'2A'
1 2 3.
A AA’ A’B’ B’B BC CC’ C’
A AA’ A’B’ B’B BC CC’ C’
2A 2B 2C
2C'2B‘2A'
1 2 3.
2 Bank
System

P J Smith University of Sheffield 6
Modes Of Operation
PARK NO POWER
HOLD OFF-PHASE
3 Amps
ACTUATEENABLE
OFF-PHASE
3 Amps
ACTUATE ON-PHASE ~80 Amps

P J Smith University of Sheffield 7
Position Monitoring•Previously we had been using three hall switches aligned to a set of small magnets embedded into the shaft to give positional information
•This has now been replaced by a optical quadrature system that uses three lasers to track a grating attached to the shaft of the shuttle

P J Smith University of Sheffield 8
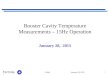
How does it Work?
Single Mode OpticFibers
Lenses
Grating – Slits at 300micron spacing
ReceiverLASERSource
Shaft of Shuttle
Collimators
Multi-mode optical fibres

P J Smith University of Sheffield 9
Single mode fibres –
transmitting
Multimode fibres – collecting
Grating

P J Smith University of Sheffield 10
Hall Switches OpticalPosition known to about 3mm
Position known to about 150 micron
Only provided modulo 6 positional information
Absolute position is known
Questions about reliability of Hall Switches in Radiation
Still Questions about Reliability – but radiation hard components and fibres can be used
Long signal cables 50m required in electrically noisy environment
Effectively noiseless transmission
Position Monitoring

P J Smith University of Sheffield 11
•The system has proved to be a much better way of ascertaining the shuttles position than the Hall switches BUT there has been both hardware and software ‘bugs’: this system is presently being developed and improved.
-Development of ‘flat’ windows to improve collimation and light collection
-Upgrade of electronics to remove some problems with the index channel
-Upgrade of software to ensure that position data is accurately read by other boards
Position Monitoring

P J Smith University of Sheffield 12
Diagram of the System
Laser
Collimators
Collimators
Optical Amplifier
Optical Amplifier
Optical Amplifier
Quadrature
Board - P
Programmable Index
Offset - P
Control
BoardPower
Electronics
Control
Board - P
Current
Controller

P J Smith University of Sheffield 13
Control System
•Output from the position system is input into the controller
•Using PIC processors – Now that we are gaining some experience with these processors we are able to upgrade them. More Speed - 8MIPS. More memory
•This takes the positional information and other status/inputs and decides what coils in the actuator should be powered and at what current – Uses look-up tables
•Different lookup tables can represent different actuation depths or actuation profiles.

P J Smith University of Sheffield 14
Control System
•We are also in the process of upgrading the interface between the controller and the power electronics from an electrical interface to an optical one
• This is a reflection upon the decision to move the power unit into the ISIS ring and also provides a consistent interface

P J Smith University of Sheffield 15
Actuator
&
Optics
Power
Electronics
Control Electronic
s
ISIS HALL MICE HALL
5 metres
~50 metres
CableOptic Fibres

P J Smith University of Sheffield 16
Power Electronics•In the lab we have been using a system that allows us to pulse the actuator at up to 10A
•With this we have achieved an actuation depth of 28mm in 50ms.
•This was in free air and the coil timings have not yet been optimised – possible room for improvement?
•The current to the actuator is controlled by superimposing a 20kHz PWM signal onto the coil switching signals. The duty cycle of the PWM determines the ‘effective’ current that the actuator sees.
•An effective current of 2-3 Amps is sufficient to levitate the shuttle

P J Smith University of Sheffield 17
Power Electronics
•BUT: 10 amps is not enough to actuate the shuttle to specification! – We suspect that ~80 amps is the minimum current that will be required to do this
•The design of a suitable power stage has been taken on by Daresbury Laboratories in the UK – Steve Griffiths, Jim Cartledge

P J Smith University of Sheffield 18
Power Electronics •Daresbury design will centre around a trickle charged capacitor bank as the high currents are only required for a relatively short duty cycle
•As the current requirement is not yet well specified they are using IGBTs (Insulated Gate Bipolar Transistor) that are rated up to 300A @ 20kHz
•The idea here is to give us plenty of overhead so if we should find that the actuators current requirement is higher than expected then it will be relatively easy to provide it without a major redesign.
•We should obtain the first of two power modules from Daresbury by late summer – In time for tests at RAL in October

P J Smith University of Sheffield 19
Power Electronics
•Much to do on the mechanical design to ensure that the actuator can dissipate the heat when 80 Amps is passed through it.
•Improve the thermal conduction away from the coils
•One electronic solution is to run the actuator coils as a series of 2 or 4 banks
-This could reduce thermal loading by up to ~50%
-But significantly increases the complexity of the controller
-Requires more Power Drivers

P J Smith University of Sheffield 20
DAQ
•DAQ was covered at Osaka in more detail by Lara
•DAQ write individual pulses to file
•Analysis of individual pulses
For each insertion the position is monitored to ~150 microns at 500ns time resolution
•Analysis of trends over time
•Future upgrade to an EPICS system so that the target performance can be monitored and recorded by MICE users

P J Smith University of Sheffield 21
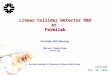
10 Ampere Pulse –38mm travel
10 Ampere Pulse –28mm
travel

P J Smith University of Sheffield 22
Current & Future Work•Much of the electronics is being ‘upgraded’ at the moment – Hence the lack of photos and video clips of a working actuator!!
-Quadrature boards
-Controller boards
-Optical Links being installed
•Starting to take the issues of ‘noise’ more seriously as the long term reliability of the electronics is important
-Wiring layout
-Appropriate shielding
•All of this should be completed before the July tests.

P J Smith University of Sheffield 23
•Redesign of optical block to remove alignment/light collection problem
•This is something that we have only just started to look at – doubtful that the present optical block will be replaced for July – but certainly for the October tests
Current & Future Work

P J Smith University of Sheffield 24
Conclusion
•We have had hundreds of recorded pulses from the system with it running at an actuation current of 10A
•It has been reliably(?) actuated for an average of 45 minutes without dropout at 0.3Hz
•What we have learnt from this is being recycled back into the next iteration of design for the electronics to make a system that is far more robust and reliable
•The actuator is being moved from being actuated in open air to being actuated in a vacuum system
•We are acquiring a Power Supply that should allow us to actuate the shuttle through the required envelope for operation in ISIS – Questions over coil heating yet to be resolved
•We need to prove the long term reliability of the electronics and the optical system