Embed Size (px)
DESCRIPTION
mechanical model
Citation preview

[Research Articles]
American Journal of Physical Medicine & Rehabilitation
Número: Volume 78(5), September/October 1999, pp 435-446
Copyright: © 1999 Lippincott Williams & Wilkins, Inc.
Tipo de publicación: [Research Articles]
ISSN: 0894-9115
Registro: 00002060-199909000-00006
Palabras clave: Wheelchair, Spinal Cord Injury, Three-Dimensional Kinematics, Inverse Dynamics, Repetitive Strain Injury
GLENOHUMERAL JOINT KINEMATICS AND KINETICS FOR THREE COORDINATE SYSTEM
REPRESENTATIONS DURING WHEELCHAIR PROPULSION1
Cooper, Rory A. PhD2; Boninger, Michael L. MD; Shimada, Sean D. PhD; Lawrence, Brad M. MS
Información sobre el autor1 From the Human Engineering Research Laboratories; Veterans Affairs Pittsburgh Healthcare System (RAC, MLB, BML),
Pittsburgh, Pennsylvania; Departments of Rehabilitation Science and Technology (RAC, MLB), and Bioengineering (RAC, MLB),
University of Pittsburgh, Pittsburgh, Pennsylvania; Division of Physical Medicine and Rehabilitation, Department of Orthopaedic
Surgery (RAC, MLB), University of Pittsburgh Medical Center, Pittsburgh, Pennsylvania; and Biomechanics Laboratory (SDS),
Department of Health and Physical Education, California State University, Sacramento, California.
This research was partially supported by the U.S. Department of Veterans Affairs, Rehabilitation Research and Development
Service (B869-RA), Paralyzed Veterans of America, and Eastern Paralyzed Veterans of America.
2 All correspondence and reprint requests should be addressed to: Human Engineering Research Laboratories (151-R1), VA
Pittsburgh Healthcare System, 7180 Highland Drive, Pittsburgh, PA 15206.
ABSTRACT
The shoulder plays a very important role during manual wheelchair propulsion. Unfortunately, substantial
numbers of manual wheelchair users eventually develop shoulder injury or pain. Recently, studies have begun to
investigate the etiology of wheelchair user shoulder injuries. This study compared three coordinate systems used
to represent the shoulder during wheelchair propulsion. Our results show statistically significant differences
between the three shoulder representations analyzed. Differences are seen for individuals and for the subjects as
a group. Based upon our results, the fixed-z model appears preferable over the other representations due to its
simplicity, low hardware requirements, and the similarity of the results to the free representation. This article
also provides some insight into maximal shoulder joint forces and moments recorded during manual wheelchair
propulsion. Future work should include more sophisticated models of the shoulder complex.
Manual wheelchair propulsion is an important form of mobility for millions of people with lower extremity
impairments. To maximally benefit from a manual wheelchair, the interaction with the user must be optimized.
Optimization requires proper measurement, selection of features, positioning, and training.1-3 Only recently have
the tools become available to thoroughly study the biomechanics of wheelchair propulsion. These tools include
devices for measuring the pushrim forces in three-dimensions,4-6 system for simulating wheelchair propulsion,7, 8
and a system for measuring the motions of the arms in three dimensions.9 The data acquisition and control of
these systems must be coordinated to obtain valid and clinically useful data.
The shoulder is a complex joint that plays an important role in manual wheelchair propulsion. Investigators
have been working for several years to characterize shoulder kinematics and kinetics to address the injuries
experienced by manual wheelchair injuries and to improve propulsion efficiency. Few studies have presented
motions of the shoulder during wheelchair propulsion.10, 19 There have been studies that have described
wheelchair propulsion technique and analyzed wheelchair propulsion efficiency.11-15 Pushrim forces have also
been reported.8, 11, 15-18, 27, 28 A few articles address the dynamic forces borne by the wrist during wheelchair
propulsion.6, 8, 15, 27 Data have been published on a quasi-static study of the complex shoulder model that
included the scapula and clavicle.18 Limited data regarding dynamic shoulder forces and moments during
wheelchair propulsion have been reported.19, 28
This investigation had the following purposes:
1. to represent shoulder kinematics and kinetics during manual wheelchair propulsion using a sternum-based rigid-
body reference;
2. to calculate glenohumeral joint motion motion, shoulder net forces, and shoulder net moments in 3-D; and
3. to compare the representation of the glenohumeral joint presented in this article with methods restricting
trunk motion to the sagittal plane and to a fixed global reference frame.
For the purposes of this study, we refer to the three coordinate system representations as free, global, and
fixed-z. The free coordinate system representation is developed in a later section and detailed in the Appendix.
This representation assumes that shoulder motion can be referenced to a rigid-body fixed at the sternum. The
global coordinate system representation refers to the common practice of assuming that the trunk is fixed to a
laboratory reference (i.e., vertical, horizontal, and transverse). The fixed-z coordinate system representation is
used to define shoulder motion when the trunk is restricted to move in the sagittal plane only (i.e., no trunk
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 1/18

rotation). During this study, we concentrated on glenohumeral joint motion. We did not attempt to investigate or
represent movements of the scapula, clavicle, or thoracic gliding. Our simple ball and socket model of the
shoulder with the resulting net forces and moments may be all that is necessary to adapt wheelchair designs to
reduce the incidence of shoulder injuries.
This study was designed to test the following hypotheses:
1. peak glenohumeral joint net forces would be significantly (p < 0.05) different for the three coordinate system
representations;
2. peak glenohumeral joint net moments would be significantly (p < 0.05) different for the three coordinate
system representations; and
3. the range of glenohumeral joint angles would be significantly (p < 0.05) different for the three coordinate
system representations.
Representing and recording shoulder motion during wheelchair propulsion is important for understanding the
mechanisms that contribute towards injuries. Moreover, this information should lead to new therapies, better
positioning, and improved wheelchair design.
EXPERIMENT DESIGN
Subjects
We only used data from people who used wheelchairs as their primary means of mobility. This population was
selected as the long-term goal of this research is to improve wheelchair design and set-up, and previous studies
have shown that there are differences between propulsion technique among people with and without disabilities.
Data from six subjects with paraplegia due to complete spinal cord injury were used to examine the methods
presented in this article. The three women and three men had spinal cord injuries below T-4, which ensured that
arm motion was not neurologically impaired. Each subject gave informed consent to voluntarily participate in his
study. Before participating in this study, each subject completed a medical history questionnaire. The average
age of the subjects tested was 31.7 ± 6.1 yr. The subjects had been using a wheelchair an average of 11.3 ± 2.0
yr. The mean body mass for the subjects was 80.0 ± 14.4 kg. Each subject propelled his or her personal
wheelchair during testing.
Anthropometric Model
Segment lengths were determined using the anatomical landmarks recommended by Drillis et al., who showed
measurements based upon palpable bony landmarks are highly correlated with measurements from a cadaver
study.21 The dimensions obtained from the palpable bony landmarks were then used to develop the segment
mass, segment center of mass, and segment inertial properties from Hanavan's model utilizing Clauser et al.'s
multistep weight distribution regression equations.23 Hanavan developed a 15-segment model based on modeling
segments as an ellipsoid: head, elliptical cylinders; upper and lower trunk, solid spheres; hands and frustra of
right circular cones, the remaining portions of the arms and all segments of the legs.22 Hanavan also used Barter's
regression equations to develop a set of equations for determining individual segment center of mass locations
and moments of inertia about the three principal axes of each segment. A set of anthropometric data including
lengths, diameters, and circumferences were required to determine segment parameters for individual subjects.
Our study included the mass, center of mass, and inertias of the hand, forearm, and upper-arm. This
anthropometric model is not specific to individuals with spinal cord injury. However, it is among the best
available, given that anthropometric data specific to people with spinal cord injuries are unavailable.
Kinematics for Inverse Dynamic Model
Anatomical glenohumeral motion is defined by motion of the humerus with respect to the trunk. To
determine three-dimensional glenohumeral motion, both humerus and trunk (sternum) local coordinate systems
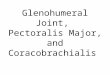
must be defined. The humerus coordinate system was defined by three unit basis vectors; is, js, and ks (see Fig.
1). The unit vector, js, lies along the long axis of the humerus which is defined using markers 2 and 3 as shown in
Figure 2. Equation (1).
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 2/18

Figure 1. Diagrams showing the global and local coordinate systems used to describe shoulder net joint forces and
moments.
Figure 2. Marker placement for analysis of shoulder motion during wheelchair propulsion.
Equation 1
The unit vector, ks, is defined as the vector perpendicular to the plane that is formed by the humerus and
forearm. The unit vector, ks, is calculated by the cross-product of the unit vector, js, and a unit vector lying
along the forearm segment. The final unit vector, is, is defined by the cross-product of js and ks: Equation (2).
Equation 2
The second local coordinate system defines the trunk segment. The markers creating a vertical vector on the
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 3/18

trunk rigid body (markers 5 and 6), defines the first unit vector: Equation (3).
Equation 3
The unit vector, kt, is calculated by the cross-product of the unit vector jt and the unit vector lying along
the horizontal line on the sternum rigid body (marker 4 and 5). The last unit vector, it, is defined as the cross-
product between jt and kt: Equation (4). Now since we have defined the two local coordinate systems: Equation
(5).
Equation 4
Equation 5
We can calculate simplified shoulder anatomical flexion/extension, abduction/adduction, and horizontal
flexion/extension angles by rotating the humerus, is, into the trunk coordinate system, see equation (6). Because
the coordinates defining the orientation of the humerus are orthogonal, any one of the basis vectors can be used
to determine the angles examined in this paper.1, 20, 27 Equation (6). The result of equation (6) can be
represented by equation (7). Equation (7) Simple shoulder flexion/extension is described by: Equation (8) while,
simple shoulder abduction/adduction is defined as: Equation (9). The simple shoulder horizontal flexion/extension
angle was also calculated. The angle is defined as: Equation (10).
Equation 6
Equation 7
Equation 8
Equation 9
Equation 10
The internal/external angle of the simplified shoulder is described by rotating the humerus so that it is in
alignment with the unit vector, kt. This is done in two rotations. First we must rotate the humerus parallel to the
it and kt plane by finding the angle [sigma]: Equation (11). Using the rotation matrix 1, 20, Rk, Equation (12), we
then rotate the humerus by: Equation (13). Then the angle, [delta], is calculated in order to rotate the humerus
parallel to the jt and kt plane: Equation (14). Using the rotation matrix Rj, Equation (15), we rotate the humerus
once again by: Equation (16).
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 4/18

Equation 11
Equation 12
Equation 13
Equation 14
Equation 15
Equation 16
Finally, the rotated unit vector, ks, is projected into the it and jt components of the trunk coordinate
system. This defines internal/external rotation: Equation (17).
Equation 17
This technique transforms the three-dimensional motion that is involved with internal/external rotation into a
two-dimensional motion. This method simplifies the description of internal/external rotation.
Kinetics from a Global Framework
To calculate the net joint kinetics of the glenohumeral joint, the masses, center of masses, and inertias of
the limb segments of the arm are required. In addition, a model of each of the joint of the arm is required. For
this study, ball and socket joints were used. The limb segments were assumed to be rigid with constant
anthropometric parameters (e.g., mass and center of mass). Furthermore, the linear and angular positions, angular
velocities, and linear and angular accelerations must be known as time-series. Lastly, the external forces acting
on the limbs must be known. Net joint force/moment equations can be derived from the free-body diagrams of
link segment models. However, the equations of motion can be programmed in any number of forms: some more
efficient than others. A numerically stable algorithm for efficiently computing three-dimensional net muscle
moments and net joint forces for n-degree of freedom link-segment models will be presented. A matrix approach
was used to develop an algorithm for computing three-dimensional net muscle moments and net joint forces. The
similarity of the structure of the free-body diagrams for link-segment models was exploited.
The inertia's (Ip) about the x, y, and z axis of the fixed reference (i.e., global frame) frame are related to the
inertia's (Is) of the segment about axes fixed to the limb by a homogeneous rotation matrix. The vector triad
(iworld, jworld, kworld) is fixed to the reference along laboratory x, y, z axes and another orthogonal triad (isegment,
jsegment, ksegment) is fixed to the moving segment, any arbitrary finite rotation can be expressed in terms of the
Euler angles ([psi], [theta], [script phi]) (see Fig. 3).1, 20 Equation (18)
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 5/18

Figure 3. Relationships of angles and axes between a body segment and the global coordinate system.
Equation 18
The angular accelerations about the proximal end, [alpha]x, [alpha]y, [alpha]z, are the second derivatives of
each segment absolute angle about the appropriate axis. The centripetal acceleration component of the
moments is found from the cross-product of the inertia matrix with the angular velocity vector. Equation (19)
Equation 19
The joint reaction forces and moments can be determined using a matrix equation with the following
definitions: Equation (20) The variables defined above can be combined to form a single matrix equation. Equation
(21)
Equation 20
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 6/18

Equation 21
Equation (21) can be used to calculate three-dimensional net muscle moments and joint reaction forces for a
particular "snap-shot" of a single segment.1 Currently, post processing is the only means of determining muscle
moments and joint reaction forces. This is due to limitations in image processing systems, and the integration of
kinetic and kinematic data. When post processing, all of the anthropometric, kinematic, and most distal link
segment kinetic data are available. Most systems store this data in matrix format. The kinetic data set for the
most distal link-segment is defined as the reaction matrix. Equation (22)
Equation 22
The accelerations (linear and angular) for each joint segment can be written as an acceleration matrix.
Equation (23)
Equation 23
The mass and moment arms of the Earth's gravitation can be combined into a single matrix for each joint-
segment. Equation (24)
Equation 24
Selecting the form of the kinematic data matrix can improve the efficiency of the algorithm. Equation (25)
Equation 25
All of the matrices are of the proper dimension to calculate the muscle moments and joint reaction forces.
However, the reaction matrix requires some preconditioning which makes the post-processing algorithm slightly
more complex than the real-time algorithm. Equation (26) end (Equation 29) end
Equation 26
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 7/18

Equation 29
The variable q represents the joint-segment index, and n is the number of joint-segments of interest in the
model. The most distal joint-segment is defined as joint 1, typically a metacarpophalangeal joint. The algorithm in
equation (26) would be run to calculate the joint reaction vector for joint-segments of interest. This approach is
computationally efficient because the matrix structure takes advantage of computer data structures. The
algorithms only require simple matrix multiplication and addition. The matrices are triangular or block diagonal
which further simplifies computation. All transformations are numerically stable. The algorithms were implemented
in Matlab (The Mathworks Inc., Natick, MA).
Net Glenohumeral Joint Kinetics in an Anatomical Reference System
The reaction forces at the shoulder are referenced to the humerus (see Fig. 1). These forces are determined
using the results from the absolute joint reaction forces, which are a product of the algorithm presented in
equation (21) and the coordinate transformation matrix for the shoulder local coordinate system presented in
equation (5). The shoulder joint reaction forces, referenced to the trunk (sternum), may be determined using
equation (27), Equation (27)
Equation 27
The net moments about the shoulder joint were expressed in terms of the humerus coordinate system (see
Fig. 1). This is accomplished by using the results of equation (21) and the homogeneous transformation matrix for
the trunk presented in equation (5). The shoulder joint net reaction moments, referenced to the trunk, may be
determined using equation (28), Equation (28)
Equation 28
Both equation (27) and equation (28) contain homogeneous rotation matrices. This is because the local
coordinate systems for the trunk and humerus can be viewed as rotated versions of the global coordinate system
with all axes sharing a common origin at the glenohumeral joint.1 This is possible because the net joint forces and
moments for the shoulder are first calculated in the global coordinate frame. With this foundation, the net forces
and moments can be transformed from one coordinate system to another in order to provide more clinically
relevant orientations. The "right-hand rule" was used to define positive forces and moments.
Experimental Protocol and Kinetic Data Collection and Conditioning
Pushrim force/moment data were collected from the SMARTWheel at 240 Hz and filtered at 30 Hz.25 The
kinetic data filter was an eighth-order, zero-phase digital Butterworth type. For the purposes of this study, the
propulsion phase was defined as the period when the moment about the hub, Mz, deviated more than 5% from
baseline, until it once again returned to baseline and remained within 5%. We have previously described two- and
three-dimensional versions of a force and torque sensing SMARTWheel.4, 6 During this experiment, a standard
polished and anodized aluminum pushrim of 0.2667 m radius was mounted to each wheel. Standard gray rubber
tires 61 cm (i.e., 24 inch) diameter with width 3.5 cm (i.e., 1.375 inches) were used. A foam insert was used in
place of a pneumatic tube. Each subject propelled his/her own wheelchair attached with a SMARTWheel at 1.8 m/s
(4 mph) on a wheelchair dynamometer for 5 min. The wheel position, wheel alignment, and wheel camber were
the same as those for the subject's standard wheelchair wheels. The resistance of the dynamometer was set
equivalent to rolling over a smooth tile floor.24 Subjects were asked to propel their wheelchair on the
dynamometer for at least 5 min to become accommodated to the experimental set-up. After the accommodation
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 8/18

period, subjects were asked to propel their wheelchairs at 1.8 m/s with a power output of 15 W. Data were
collected for 20 s after the person had maintained the desired speed for at least 10 s.
Kinematic Data Collection and Conditioning
Motion data were collected with a six-camera OptoTrac active infrared marker motion analysis system
(Northern Digital Inc., Waterloo, Ontario, Canada) at 60 Hz and filtered at 6 Hz. The motion data filter was an
eighth-order, zero-phase digital Butterworth type. The filter type, order, and cut-off frequency were determined
using the discrete-Fourier-transform and power-spectral density estimate. Linear and angular velocities and
accelerations were determined using finite difference methods based upon a Taylor-series expansion. We used a
computer-generated synchronization pulse to align sampling of motion and pushrim force/moment data. The
kinematic data were selected coincident with the propulsion phase defined by the kinetic data. This eliminated
the need to estimate from kinematic data whether the hand was in contact with the pushrim. Markers were
placed over each subject's acromion process, lateral epicondyle, olecranon process, ulnar styloid, radial styloid,
second metacarpophalengeal joint, and fifth metacarpophalangeal joint (see Fig. 2). These makers locations have
been used successfully in previous studies. There is a theoretical potential for "gimble-lock" (i.e., an
indeterminent axial rotation), but this unlikely due to anatomical constraints. Two carbon fiber composite rigid
bodies, which included three infrared LED markers each, were used to track and record head and sternum
motion (see Fig. 2). The markers on the rigid body used to record sternum motion are approximately 10 cm apart
from one another. The sternum rigid body was designed to rest firmly against the sternum for both male and
female subjects. The motion analysis system was calibrated before each use with a rigid body aligned with the
vertical, horizontal, and transverse axes of the laboratory. This permitted us to track the head and sternum rigid
bodies with respect to laboratory coordinates. Before recording motion data, each subject was filmed with the
markers in a static position, and a rigid-body stylus was used to identify anatomical landmarks with respect to the
markers. These data were used to compensate for joint centers and determine the location of anatomical
landmarks in laboratory coordinates.
Statistical Analysis
Joint angles and the anatomically based forces and moments in three dimensions were analyzed for 10
propulsion strokes. Variables were analyzed among individual subjects across the three coordinate system
representation and for the six subjects as a group. During the group analysis each subject's data for the 10
strokes were averaged. The average across the 10 strokes was used to represent a subject. Each stroke is not an
independent variable; collecting multiple strokes and averaging yields a stroke that is representative of that
individual. Therefore, each subject's data could be treated as being independent when comparing models.26 A
two-step approach was used to determine the reliable parameters across multiple strokes.26 First, the interstroke
reliability was evaluated by interclass correlation coefficients ([rho]). A parameter was considered reliable and
consistent if the interclass [rho] was greater than 0.60.26, 27 Second, for parameters that met the inter-stroke
reliability coefficient criteria, Cronbach's coefficient alpha was computed to determine the increased reliability
of creating aggregated scores across multiple strokes. A summed score was considered to have high reliability if
alpha was greater than 0.80.26, 27 The apriori selection of the acceptable [rho] and Cronbach's coefficient alpha
was based upon a previous study of the wrist.27 Analysis of variance (ANOVA) with Scheffé post-hoc analysis was
used to compare reliable shoulder angle, force, and moment variables between the three models. A P < 0.05 was
considered statistically significant. The same global data were used to represent each subject. Therefore, the
differences in the results for an individual are due solely to the representation chosen.
RESULTS
All of the variables proposed in the introduction for comparison had interclass correlation coefficients ([rho])
greater than 0.60 and Cronbach's coefficient alphas greater than 0.80. Therefore, no variables were excluded
from further analysis.
Shoulder Angles
The mean and standard deviation of the maximum angles from all subjects for each of the three shoulder
angle coordinate representations are presented in Table 1. ANOVA found significant differences among the group
in maximum shoulder abduction between the free model and global representations (P = 0.007) as well between
the free and the fixed-z representations (P = 0.026). Our data also indicated significant difference between the
free and the global representations for maximum external rotation (P = 0.038) and between the global and fixed-z
representations for maximum internal rotation (P = 0.044) among the group of subjects. The group showed no
significant differences between the three representations (i.e., free, global, fixed-z) for maximum sagittal
extension, maximum sagittal flexion, and maximum horizontal flexion. None of the subjects went into shoulder
adduction or horizontal extension with any of the three representations.
TABLE 1 Maximum angles for shoulder motion using selected models for wheelchair propulsion
When the maximum shoulder joint angles for the three representations were compared for each individual,
several statistically significant differences were detected, see Table 2. At least one subject showed a significant
difference for every maximum shoulder angle across all representations. The greatest number of differences (n =
32) were observed between the global and the fixed-z representations. There were also 29 cases where the free
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 9/18

representation resulted in significant differences with respect to the global representation. The greatest number
of differences (n = 17) were recorded for sagittal extension angles.
TABLE 2 Significant differences (P < 0.05) between shoulder angles for the three models for each subject
individually
Glenohumeral Joint Net Forces
The mean and standard deviation of the maximum forces from all subjects for each of the three shoulder
coordinate representations are presented in Table 3. Statistical analysis revealed significant differences between
the free and both other representations (P < .001) for maximum compressive forces (i.e., forces acting on the
shoulder in the medial direction) among the group data. No other significant differences were found.
TABLE 3 Maximum forces in Newtons for shoulder motion using selected models for wheelchair propulsion
ANOVA revealed a number of significant differences (P < 0.05) between the maximum shoulder forces among
individuals across representations (e.g., free, global, fixed-z). The largest number of differences (n = 20) were
recorded between the free and the global representations (see Table 4). The second largest number of
differences were observed between the global and fixed-z representations. The greatest number of differences
(n = 16) were demonstrated for the maximum posterior to anterior force.
TABLE 4 Significant differences (P < 0.05) between shoulder forces for the three models for each subject
individually
Glenohumeral Net Joint Moments
The mean and standard deviation of the maximum moments from all subjects when resolved with each of the
three shoulder coordinate system representations are presented in Table 5. There were no significant
differences (P < 0.05) between the maximum moments between any of the models used in the study among this
group of subjects.
TABLE 5 Maximum moments in Newton · meters for shoulder motion using selected models for wheelchair
propulsion
The analysis of shoulder maximum moments among individuals across strokes revealed several statistically
significant differences (P < 0.05). The greatest number (n = 15) of differences were recorded between the free
representation and the global representation (Table 6). The next greatest number of differences were observed
between the free and the fixed-z representations. Most differences between coordinate systems for individual
subjects were attributable to the maximum adduction moments.
TABLE 6 Significant differences (P < 0.05) between shoulder moments for the three models for each subject
individually
DISCUSSION
A primary focus of our work is on the investigation of injury mechanisms. With this focal point in mind,
representing the shoulder must lead to consistent biomechanical variables that are alterable and that are
correlated with injury mechanisms. The goal is to find consistent biomechanical variables that when optimized will
lead to a lower probability of developing a shoulder injury. This study contributes to the development of robust
methodologies that enable forces, moments, and motion at the shoulder to be characterized for wheelchair
propulsion. All of the variables selected for comparison in this study had interclass correlation coefficients
greater than 0.60 and Cronbach's coefficient alpha greater than 0.80.
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 10/18

In the current study, all forces and moments were recorded at the pushrim with 7 degrees of freedom. In
addition, all measurements were made in each subject's personal wheelchair, whereas previous studies used
either a standardized wheelchair or ergometer. We know of no other wheelchair study that fulfills all of these
criteria. The time-series data for the shoulder angles, forces, and moments exhibited similar shapes for all
subjects. The greatest similarity was between the fixed-z and the free coordinate systems. One would expect the
force and moment time-series curves to be similar for the three representations when the angle time-series
curves are similar. There were no apparent differences in the timing of the maxima across the three selected
coordinate systems. The shoulder angle time-series data for each stroke produced a single hump or valley,
whereas the force and moment time-series data during each stroke showed more oscillatory behavior with two or
more local maxima. In nearly all cases, the shoulder forces and moments expressed a minima or maxima coincident
with the minima or maxima of the shoulder angles. The relationship between angle and force/moment minima and
maxima should be investigated further in a future study.
During a study of 16 manual wheelchair users propelling at a freely chosen speed, Rao et al. found humeral
elevation (i.e., abduction-adduction) to vary from 22.5 to 56.6°.10 As in our study, their subjects did not go into
adduction. The humeral plane angle (i.e., sagittal flexion-extension) was found to vary between -57.3 and 23.2° on
average. They found internal rotation to exhibit a maximum mean of 86.2°. Their data did not present external
rotation on average as did ours. The mean of the peak values are similar to those found in present study and are
closest to those results for the global model, which is similar to the shoulder model used in their study. The
differences are likely due to changes in marker systems, differences in speed, and variations in the fit of the
wheelchairs.
While investigating wheelchair propulsion with fatigue, Rodgers et al. reported shoulder kinetic and kinematic
data.19 They found shoulder flexion/extension range of motion (ROM) to be between 60 and 70°. Our shoulder
flexion/extension data are similar. They found shoulder abduction/adduction ROM to be about 20°. This is about
half the ROM exhibited by our subjects. This difference could be due to the smaller pushrim size (radius = 0.19 m)
and altered seating position used in their study. It is not possible to compare the kinetic data because of the way
they presented their data.
There is no "gold standard" for wheelchair propulsion kinematics and kinetics. All studies (including this one)
of the shoulder have made simplifying assumptions for trunk motion due to the inability to accurately record
trunk motion in three dimensions. To attempt to address this limitation, we developed a carbon-fiber rigid-body
that attaches to a subject's sternum. The light weight and stiffness of the rigid-body makes accurate
measurement of sternum motion possible without causing discomfort for the subject or altering motion patterns.
This permits trunk motion at the sternum to be recorded in three dimensions, eliminating the need to fix the
trunk to a global coordinate system. The orientation of the rigid-body with respect to the laboratory coordinate
system must be determined apriori using static calibration against a known three-dimensional reference. Without
a trunk mounted marker system (e.g., rigid-body), investigators have either fixed the trunk to a global coordinate
system (i.e., no trunk flexion/extension and no trunk rotation) or fixed the trunk to the global transverse axis
(i.e., trunk flexion/extension but no trunk rotation). Our methods relax these assumptions and allow for greater
trunk motion. However, the results of the fixed-z representation and the free representation are similar in many
cases. This would suggest that for some studies the fixed-z representation may be desirable, because of its
greater simplicity. Moreover, the fixed-z representation can be applied without using a sternum mounted rigid-
body. However, the free model provides results more similar to those of more complex shoulder
representations.29
None of the studies reviewed, including our work, directly measured the forces and moments in the
shoulder. For our study a ball and socket model was used. Net forces and moments are relevant, but only
represent limited information. All biomechanical models give an approximation of the net joint forces and
moments. More detailed representations of the shoulder complex may be necessary to determine injury
mechanisms. Van der Helm and Veeger have been developing more complex models of the shoulder that lead to
greater understanding of shoulder joint degeneration during wheelchair propulsion.29 Their approach is to
attempt to obtain more accurate estimates of the internal forces acting upon the shoulder. It is certainly
valuable research to develop more complex models of the shoulder. However, greater complexity does not, in
itself, guarantee greater accuracy or clinical relevancy.
The use of body-mounted markers inherently introduces some measurement error. Methods must continue to
be developed to reduce this error. The reliance on anthropometric studies of people who were not wheelchair
users or who had no physical disability limits the accuracy of net joint moment and force estimates during manual
wheelchair propulsion. Another limitation of this study is the small sample size, which reduces its generalizability
and statistical power. Additional reliable parameters could be found with a larger sample size and a greater
number of strokes. However, all of the variables selected apriori for comparison during this study were found to
be consistent (i.e., interclass correlation coefficients greater than 0.60 and Cronbach's coefficient alpha greater
than 0.80). Our model clearly makes simplifying assumptions for the shoulder. However, it is a step toward
reducing the number of constraints and providing clinically meaningful data. The approach taken in this study
could serve as a beginning for standardized data collection and presentation. This will allow all members of the
research community to benefit from the increasing pool of data that could help to address shoulder pain and
injury among manual wheelchair users. The results of this paper provide a contribution to the normative data for
wheelchair propulsion shoulder forces and moments.
Future studies must address whether the variables presented in this study are sufficient in discriminating
between activities (e.g., speed, starting, turning) and if they are correlated with the development of injuries or
pain (e.g., longitudinal clinical trials). It is also important to determine whether the variables are alterable through
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 11/18

available interventions (e.g., positioning, pushrim changes, wheel changes, and training). This study shows that
the forces and moments for the three representations are similar. However, the individual data are more variable.
A larger sample of subjects must be tested to determine whether interindividual differences are significant. The
majority of reports in wheelchair propulsion have used body-mounted markers and not rigid-body markers. This
may have an effect on the accuracy of the motion recorded. However, investigators must weigh the clinical
efficacy of their methods against the complexity of them.
REFERENCES
1. Cooper RA: Rehabilitation Engineering Applied to Mobility and Manipulation. Bristol, England, Institute of
Physics Publishing, 1995. [Context Link]
2. Cooper RA, Trefler E, Hobson DA: Wheelchairs and seating: issues and practice. Technol Disabil 1996;5:3-16.
Solicitud de Documentos Enlace OPAC [Context Link]
3. Hughes CJ, Weimar WH, Sheth PN, Brubaker CE: Biomechanics of wheelchair propulsion as a function of seat
position and user-to-chair interface. Arch Phys Med Rehabil 1992;73:263-269. Solicitud de Documentos Enlace
OPAC Enlaces Bibliograficos [Context Link]
4. Asato KT, Cooper RA, Robertson RN, Ster JF: SMARTWheels: development and testing of a system for measuring
manual wheelchair propulsion dynamics. IEEE Trans Biomed Eng 1993;40:1320-1324. [Context Link]
5. Strauss MG, Maloney J, Ngo F, Phillips M: Measurement of the dynamic forces during manual wheelchair
propulsion. Proc Am Soc Biomech 15th Annual Meeting 1991:210-211. [Context Link]
6. Cooper RA, VanSickle DP, Robertson RN, Boninger ML, Ensminger GJ: Center of pressure during manual
wheelchair propulsion. IEEE Trans Rehabil Eng 1995;3:289-298. Solicitud de Documentos Enlace OPAC [Context
Link]
7. Vosse AJ, Cooper RA, Dhaliwal B: Computer control of a wheelchair dynamometer. Proceedings RESNA 13th
Annual Conference, Washington, DC, June, 1990:59-60. [Context Link]
8. Veeger HEJ, van der Woude LHV, Rozendal RH: A computerized wheelchair ergometer: results of a comparison
study. Scand J Rehabil Med 1992;24:17-23. Solicitud de Documentos Enlace OPAC Enlaces Bibliograficos
[Context Link]
9. Borghese NA, Ferrigno G: An algorithm for 3-D automatic movement detection by means of standard TV
cameras. IEEE Trans Biomedical Eng 1990;37:1221-1225. [Context Link]
10. Rao SS, Bontrager EL, Gronley JK, Newsam CJ, Perry J: Three-dimensional kinematics of wheelchair propulsion.
IEEE Trans Rehabil Eng 1996;4:152-160. [Context Link]
11. Dallmeijer AJ, Kappe YJ, Veeger HEJ, Janssen TWJ, van der Woude LHV: Anaerobic power output and
propulsion technique in spinal cord injured subjects during wheelchair ergometry. J Rehabil Res Dev 1994;31:120-
128. Texto Completo Enlace OPAC Enlaces Bibliograficos [Context Link]
12. van der Woude LHV, Hendrich KMM, Veeger HEJ, et al.: Manual wheelchair propulsion: effects of power
output on physiology and technique. Med Sci Sport Exerc 1988;20:70-78. Solicitud de Documentos Enlace OPAC
Derechos de Autor Enlaces Bibliograficos [Context Link]
13. Veeger HEJ, van der Woude LHV, Rozendal RH: The effect of rear wheel camber in manual wheelchair
propulsion. J Rehabil Res Dev 1989;26:37-46. Solicitud de Documentos Enlace OPAC Enlaces Bibliograficos
[Context Link]
14. van der Woude LHV, Veeger HEJ, Rozendal RH, Sargeant TJ: Seat height in handrim wheelchair propulsion. J
Rehabil Res Dev 1989;26:31-50. Solicitud de Documentos Enlace OPAC Enlaces Bibliograficos [Context Link]
15. van der Linden ML, Valent L, Veeger HEJ, van der Woude LHV: The effect of wheelchair handrim tube
diameter on propulsion efficiency and force application (tube diameter and efficiency in wheelchairs). IEEE Trans
Rehabil Eng 1996;4:123-132. [Context Link]
16. van der Woude LHV, Veeger HEJ, Rozendal RH: Propulsion technique in hand rim wheelchair ambulation. J Med
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 12/18

Eng Technol 1989;13(1&2):136-141. Solicitud de Documentos Enlace OPAC Enlaces Bibliograficos [Context Link]
17. van der Woude LHV, Veeger HEJ, Rozendal RH, Sargeant AJ: Optimum cycle frequencies in hand-rim
wheelchair propulsion. Eur J Appl Physiol 1989;58:625-632. Solicitud de Documentos Enlace OPAC Enlaces
Bibliograficos [Context Link]
18. Veeger HEJ, van der Helm FCT, Rozendal RH: Orientation of the scapula in a simulated wheelchair push. Clin
Biomech 1993;8:81-90. Texto Completo Enlace OPAC [Context Link]
19. Rodgers MM, Gayle GW, Figoni SF, Kobayashi M, Lieh J, Glaser RM: Biomechanics of wheelchair propulsion
during fatigue. Arch Phys Med Rehabil 1994;75:85-93. Solicitud de Documentos Enlace OPAC Enlaces
Bibliograficos [Context Link]
20. Cooper RA: Stability of a wheelchair controlled by a human pilot. IEEE Trans Rehabil Eng 1993;1:193-206.
Solicitud de Documentos Enlace OPAC [Context Link]
21. Drillis R, Contini R, Bluestein M: Body segment parameters: a survey of measurement techniques. Artific Limbs
1964;8:44-66. [Context Link]
22. Hanavan EP: A personalized mathematical model of the human body. J Spacecraft 1966;3:446-448. [Context Link]
23. Clauser CE, McConville JT, Young JW: Weight, volume, and center of mass of segments of the human body.
Wright-Patterson Air Force Base, Ohio (AMRL-TR-69-70), 1969. [Context Link]
24. DiGiovine CP, Cooper RA, Dvorznak MJ, Boninger ML: Bilateral analysis of manual wheelchair propulsion on
various surfaces. Proc 20th Annual RESNA Conference, Pittsburgh, Pennsylvania, 1997:234-237. [Context Link]
25. Cooper RA, DiGiovine CP, Boninger ML, Shimada SD, Robertson RN: Frequency analysis of 3-dimensional pushrim
forces and moments for manual wheelchair propulsion. Automedica 1998;16:355-365. Solicitud de Documentos
Enlace OPAC [Context Link]
26. Cicchetti DV, Aivano SL, Vitale J: A computer program for assessing the reliability and systematic bias of
individual measurements. Educ Psychol Meas 1976;761-764. Solicitud de Documentos Enlace OPAC [Context Link]
27. Boninger ML, Cooper RA, Robertson RN, Rudy TE: Wrist biomechanics during two speeds of wheelchair
propulsion: an analysis using a local coordinate system. Arch Phys Med Rehabil 1997;78:364-372. Solicitud de
Documentos Enlace OPAC Enlaces Bibliograficos [Context Link]
28. Robertson RN, Boninger ML, Cooper RA, Shimada SD: Pushrim forces and joint kinetics during wheelchair
propulsion. Arch Phys Med Rehabil 1996;77:856-864. Solicitud de Documentos Enlace OPAC Enlaces
Bibliograficos [Context Link]
29. Helm FCT van der, Veeger HEJ: Quasi-static analysis of muscle forces in the shoulder mechanism during
wheelchair propulsion. J Biomech 1996;29:39-52. [Context Link]
(Appendix) [Context Link]
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 13/18

APPENDIX Definition of Variables and Symbols
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 14/18

APPENDIX No caption available.
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 15/18

Selecionar todo Exportar la selección a PowerPoint
APPENDIX No caption available.
Key Words: Wheelchair; Spinal Cord Injury; Three-Dimensional Kinematics; Inverse Dynamics; Repetitive Strain
Injury
GALERÍA DE IMÁGENES
Figure 1
Figure 2
Equation 1
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 16/18

Equation 2
Equation 3
Equation 4
Equation 5 Equation 6
Equation 7
Equation 8 Equation 9 Equation 10
Equation 11
Equation 12
Equation 13
Equation 14
Equation 15
Equation 16
Equation 17
Figure 3
Equation 18
Equation 19
Equation 20
Equation 21
Equation 22 Equation 23 Equation 24
Equation 25
Equation 26
Equation 29
Equation 27 Equation 28
Table 1
Table 2 Table 3 Table 4
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 17/18

Table 5 Table 6
APPENDIX Definition ...
APPENDIX No caption ...
APPENDIX No caption ...
Volver al principio
Copyright (c) 2000-2010 Ovid Technologies, Inc.
Términos de uso Support & Training Acerca de nosotros Contactenos
Versión: OvidSP_UI03.02.01.105, SourceID 52233
23/08/2010 Ovid: GLENOHUMERAL JOINT KINEM…
…upo.es/sp-3.2.1/ovidweb.cgi 18/18