Embed Size (px)
DESCRIPTION
Overhead Estimation During Intra ENB Handover in 4G LTE Systems 2014
Citation preview

Performance Evaluation of MDT Assisted LTE RF Fingerprint Framework
Riaz Mondal1,4, Jussi Turkka1,2, Tapani Ristaniemi1, Tero Henttonen3 1Department of Mathematical Information Technology, University of Jyväskylä, Finland
2Department of Communications Engineering, Tampere University of Technology, Finland 3Renesas Mobile Europe Ltd, Helsinki, Finland
4Department of Information and Communication Engineering, University of Rajshahi, Bangladesh
[email protected], [email protected], [email protected], [email protected]
Abstract— This paper presents a performance evaluation of the Radio Frequency (RF) fingerprinting framework for positioning using Minimization of Drive Testing (MDT) measurements specified in LTE (Long Term Evolution) Release 10. Methods based on Mahalanobis distance and Kullback-Leibler divergence are used for estimating the geographical locations. Performance evaluation of the framework is verified with system simulator by generating MDT measurement data in intra- and inter-frequency LTE network deployments with rural and urban configurations. The focus of the research is to understand how RF fingerprint positioning accuracy changes when taking into account the prospects and constraints of the RF fingerprints constructed from the MDT measurement data. The results of the study indicate that the performances of Mahalanobis distance and Kullback-Leibler divergence based methods are quite similar in rural deployments. However, in denser network deployments, Kullback-Leibler divergence based method tends to be much better for both intra- and inter-frequency environments, resulting in better than 21 meters and 38 meters positioning accuracies for 68 percent of MDT samples in studied urban scenarios, being well below the E911 emergency positioning requirements.
Keywords-component; RF Fingerprinting; Mahalanobis Distance; Kullback-Leibler Divergence; Minimization of Drive Tests;
I. INTRODUCTION
During the past decade, location services have become popular in many wireless communication devices e.g., Global System for Mobile Communications (GMS), Universal Mobile Telecommunications System (UMTS), LTE and Wireless Local Access Network (WLAN) devices, and this has encouraged researches to investigate how estimation of User Equipment (UE) can be done. The simplest positioning method in most cellular-communication systems is the cell identity (CID) method which reports the identity or a geographical description of the cell to which the UE is connected [1]. These algorithms can be enhanced with pre-computed assistance information or extensive training measurements. Another similar method is RF fingerprinting method which is a database correlation method (DCM) where UE position is estimated by comparing UE’s RF fingerprint signature with known signatures in correlation database that are associated
with known locations [1]. Such methods have been developed for GSM [2], WCDMA [3] and WLAN [4-6] systems during the recent years. Typical RF fingerprinting signatures use radio measurements from multiple base stations (BS) e.g., received signal strength or path-loss measurements, [5] and the known location is normally determined with accurate reference-position measurement, e.g., using Global Navigation Satellite System (GNSS). By gathering RF signatures from specific known locations, a radio environment map (REM) is created that can be used to estimate the location of UEs, having no accurate position information, by correlating their RF measurements with the signatures in REM.
One of the challenges of DCM based positioning methods has been the burden of creating and maintaining accurate correlation databases. If correlation database is based on the predictions rather than real measurements, then the positioning accuracy is reduced. On the other hand, if operators are maintaining large and accurate measurement databases, then extensive and expensive periodical drive test campaigns are needed. However, the burden of maintaining the extensive correlation databases is significantly reduced in LTE Release 10 as Minimization of Drive Testing procedure is introduced. MDT provides an easy and efficient way to gather large and extensive correlation databases for RF fingerprint positioning purposes, since the MDT procedure allows to collect autonomously user experienced coverage and service quality related information associated with detailed location e.g., latitude and longitude [7-9].
The potential of positioning in cellular systems based on MDT databases has not been considered so far in the literature. In this paper, the focus is on studying the feasibility of MDT measurements for RF fingerprinting and comparing how positioning accuracy changes between Mahalanobis distance and Kullback-Leibler divergence based methods in intra- and inter-frequency LTE network deployments with rural, urban and heterogeneous urban (Hetnet) configurations as indicated in Table I.
This paper is organized as follows: Section II describes the Minimization of Drive testing functionality according to the 3GPP specifications. In Section III, RF fingerprinting framework for MDT measurement positioning is described
978-1-4799-2231-4/14/$31.00 ©2014 IPSJ
2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU)
33

with two different methods. First method uses well known Mahalanobis distance (MaD) metric and the second method relies on widely-used Kullback-Leibler Divergence (KLD) metric as introduced in [5] for WLAN systems. Finally in Section IV, the performance of the framework based on MaD and KLD methods is evaluated with system simulations in rural ,urban and Hetnet LTE network deployments.
II. MINIMIZATION OF DRIVE TESTS
A. MDT Measurements The LTE Release 10 Minimization of Drive Testing
functionality defines two MDT operation modes, Immediate MDT and Logged MDT [7-9]. Logged MDT measurement mode is used for gathering MDT data from UEs which are inRadio Resource Control (RRC) idle state whereas Immediate MDT measurements are used while UE is in RRC connected state. The immediate MDT is based on the existing RRC measurement procedure with an extension to include the available location information to the measurement reports e.g., latitude and longitude obtained from GNSS receiver. Thus, MDT allows configuring RRC measurements in a way that Reference Signal Received Power (RSRP) and Reference Signal Received Quality (RSRQ) measurements are reported periodically from the serving cell and neighboring cells (incl. intra-frequency, inter-frequency and inter-RAT (Radio Access Technology) with the available location information. In logged MDT the number of logged neighboring cells is limited by a fixed upper limit per frequency. If UE is connected to LTE network, then the UE should log the measurement results for 6 intra-frequency neighboring cells, 3 inter-frequency neighboring cells, 3 GSM neighboring cells and 3 UMTS neighboring cells [8].
The most coarse location info is the serving Cell Global Identification (CGI) and in the best case the detailed location i.e., latitude and longitude, is provided by GNSS receiver. The cell identification info consists of the serving cell CGI or Physical Cell Identifications (PCI) of the detected neighboring cells. The radio measurements for the serving and neighboring cells include the RSRP and RSRQ for LTE system and common pilot channel Received Signal Code Power (RSCP) and received signal quality (Ec/N0) for HSPA system [7,8]. In addition to periodical reporting, the MDT measurements can be collected also at an instance of a trigger such as a network event [7,8]. Since MDT measurement consists of the available location, time stamp, cell identification data and radio measurement data, it provides a good basis for creating correlation databases autonomously for RF fingerprint positioning.
III. RF FINGERPRINT ALGORITHM
A. Mahalanobis Distance Method Figure 1 illustrates the principles of typical RF fingerprint
positioning framework. The framework consists of two phases, e.g., training phase and estimation phase. In training phase, MDT correlation database is created by collecting MDT measurements from UEs which have detailed GNSS location information. This allows associating the RF measurements from different intra- and inter-frequency base stations (BS) with different geographical locations.
Figure 1: MDT RF Fingerprint Positioning Framework
In this paper, the geographical space G e.g., “area of interests” is presented as a set of rectangular 20-by-20 or 40-by-40 meter cell units ci,
{ } 1,C
i iG c
== (1)
where C is the total number of the cells in the area of interest. Each cell ci has known center point coordinates, size and Tdifferent RF fingerprint signatures denoted by set Si given as,
{ }, 1.
Ti i t t
S s=
= (2)
Each signature si,t has different base station identifier vector ii,te.g., subset of base station CGIs detected in the area of cell ci, mean received signal strength values ui,t and a covariance matrix ΣΣΣΣi,t of received signal strength values for the corresponding base stations,
{ }, , , ,, , .i t i t i t i ts = u i (3)
Statistical properties of si,t are derived from MDT measurement data matrix Mi,t=[y1,…,yP]. It is obtained by collecting those training phase MDT measurements from the same set of base stations ii,t that fall into the area of the cell ciaccording to GNSS coordinates of the MDT samples. Rows in the Mi,t represent MDT RSRP measurements from P different base stations, and column vector yj contains RSRP measurements from the same jth base station. Variable ui,t = [ ui,1,…, ui,j ] is a column vector containing the mean received signal strength values e.g., RSRP, for tth signature with ui,jbeing the mean RSRP of the jth base station obtained from yj. Similarly, the covariance between nth and mth base stations can be obtained from nth and mth columns of Mi,t.
In position estimation phase, unknown MDT measurements e.g., MDT samples which are reported without GNSS coordinates, are located by using Mahalanobis distance algorithm. Here, one sample or a set of unknown MDT samples containing measurements from the same set of base station IDs iu are used for creating testing phase signature su={ uu, iu }. The signature su is used to estimate the location of its containing MDT measurements by selecting cell ci which has signature si,tgiving the best match for su. It is worth of noting that
2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU)
34

dimensions of the testing phase signature can be smaller than the dimensions of the training phase signatures i.e., due to the switched off base stations or burden of collecting extensive measurements from all possible base stations. Therefore, vector îi,t denotes a subset of vector ii,t containing the same BS IDs as in iu and is used to select a sub-vector ûi,t of ui,t and sub-matrix
,ˆ
i tof ΣΣΣΣi,t for finding the nearest cell ci. The Mahalanobis
distance metric [10] which is used between the signatures si,tand su to determine the nearest cell is given by,
(4)
where uu is the mean RSRP signature of unknown MDT samples and ûi,t is the sub-vector of RSRP signature of cell ci
and 1,
ˆi t− is the inverse of the sub-matrix ,
ˆi t . The estimated
location of su is given by the center point of a particular cell ciwhich minimizes (4), that is,
(5)
for all those ci which have matched îi,t with iu.
It is worth of noting that (4) can be used in variety of ways depending on the characteristics of the ˆ
i matrix. If ˆi is
replaced with identity matrix I, then (4) results in Euclidean distance e.g., fingerprinting is based only on mean RSRP levels [6]. On the other hand, if ˆ
i is replaced with matrix consisting of diagonal values of ˆ
i , then (4) represent the z-normalized Euclidean distance, which takes into account the RSRP variance but assumes variance to be uncorrelated between different base stations [6].
B. Kullback-Leibler Divergence Method In this paper, also the Kullback-Leibler Divergence (KLD) method is employed for position estimation of unknown MDT measurements in cellular environments, which was previously used in [5] for locating indoor users in IEEE802.11 environment. In KLD method, training and testing phase signatures e.g., mean vectors u and covariance matrices ΣΣΣΣ, parameterize multivariate Gaussian distributions p(x|u,ΣΣΣΣ), and therefore, the method aims to exploit interdependencies among the received signal strengths between base stations by using covariance matrices for training and testing phase signatures. This is different from MaD method which uses only training phase covariance data. In KLD, the training phase signatures si,tare constructed in the same way as in MaD method. However, the MaD testing phase signature is expanded in KLD by introducing testing phase covariance matrix ΣΣΣΣu,
{ }, , ,u u uus = u i (6)
which is calculated from a set of unknown MDT samples each having measurements from the same set of base stations iu. It is worth of noting that in principle any unknown MDT measurement regardless of the source UE of it can be combined when testing phase signatures are constructed,
especially, if positioning does not have strict time constraints. This assumption is well justified when one is doing offline positioning for MDT measurements. Similarly as in MaD method, vector îi,t denotes a subset of vector ii,t with same cell IDs as in iu. Vector îi,t is used to construct a sub-vector ûi,t of ui,tand sub-matrix
,ˆ
i tof ΣΣΣΣi,t which are needed to determine KLD
metric d(pu||pi,t) between the parameterized multivariate Gaussian distributions pu and pi,t as given in [5],
(7)
Here tr() denotes the trace of matrix and I is the identity matrix. In KLD method, the estimated location of su is given by the center point of cell ci which minimizes (7), that is,
(8)
for all those ci which have matched îi,t with iu.
IV. PERFORMANCE EVALUATION
A. Simulation Scenario Simulation campaign consisted of three different
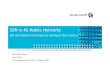
simulations which were conducted with state-of-the-art LTE Rel’10 dynamic system simulator modeling both the downlink and the uplink in a OFDM symbol resolution with several radio resource management, scheduling, mobility, handover and traffic modeling functionalities. Simulation parameter and mathematical models are based on the 3GPP specifications defining i.e., used bandwidth, center frequency, signal propagation, slow fading and fast fading parameterization [11]. Moreover, UE measurements e.g., RSRP metric was implemented in simulator as specified in [12]. First simulation consists of a rural regular hexagonal network layout of 57 base stations operating on the same frequency band having inter-site distance of 1750 meters. However, since outermost tier of base stations was used to generate interference, UEs were moving only in the area of 21 centermost base stations but they were able to monitor all cells without limitations. In the second simulation, the inter-site distance was reduced to 500 meters for evaluating the performance in regular urban environment. In rural and urban case, all cells were on the same frequency layer and RF fingerprinting was done based only on the intra-frequency measurement results. However, in the third simulation, the regular macro scenario was changed to heterogeneous scenario e.g., Hetnet, by dropping 18 inter-frequency small cells to 6 centermost macro cells as depicted in Figure 2 with red circles, which roughly indicate the area of coverage of the pico cells. In this case, the RF fingerprinting was done based on the measurements from 4 intra-frequency and 3 inter-frequency cells.
i = arg mini=1,...,C
d (su ,si ,t ),
( ) ( ) ( )1, ,, ,, ˆ
i tT
u i t i t i tu ud s s −= − −ûuûu( ) ( ) ( ) ( )( )1 1 1
, , , , ,,1|| ˆ ˆ ˆln2 i t i t i t u i t u
Tii u tu t ud p p tr− − −= − + −− −û û Iu u
,1,...,arg min ( || ),u i ti C
i d p p=
=
2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU)
35

Figure 2: Hetnet Simulation Scenario
In total, 639 randomly moving outdoor pedestrian UEs were distributed uniformly to the simulation area and UE movement was limited by a polygon enclosing the 7 centermost sites. Detailed list of essential simulation parameters are shown in Table I. Traffic profile consisted of only data generated by MDT reports which were sent once per second, however, 100% resource block loading was used for creating interference limited simulation environment.
TABLE I. SIMULATION PARAMETERS
Parameter Rural Urban Hetnet (Macro / Pico)
Intersite distance 1750m 500m Avg. 150m
Number of cells 57 / - 57 / - 57 / 18 Macro Propagation
model Macro = 128.1 + 37.6log10(dkm)
Pico Propagation model Pico = 140.7 + 36.7log10(dkm)
Shadowing stdev. 8 dB = Macro cells / 10 dB = Pico cells Shadowing corr.
distance 25m = Macro / 25m = Pico cells
Fast fading model Typical Urban Measurement error
model Deviation of RSRP measurement error as in [11]
Max TX Power 46 dBm 46 dBm 46 dBm / 30 dBm
UE Movement Random 3 km/h pedestrian Reporting length
per UE Varying with mean length 30 seconds
MDT reporting inverval One report per second
It was assumed that always 4 intra-frequency and 3 inter-frequency base stations are detected per MDT sample. For the studied deployment cases, the cell detection performance in case of fully interfered network was not taken into account. In such a case, the detection of 4 intra-frequency neighbors in single frequency band with frequency reuse 1 can be over optimistic. Moreover, positioning error of indoor UEs were not taken into account in this study. Such case can be problematic in practice since MDT measurements with detailed location comes mostly from outdoor users e.g., GNSS is available, and indoor users can suffer additional uncertainties when outdoor training data is correlated with MDT measurements from
indoors. In our case, such indoor measurements are not considered e.g., only outdoor users are simulated, and the analysis of the indoor sample fingerprinting as well as the cell detection performance is left for future studies.
B. Performance Results The positioning accuracy of the two methods were
analyzed using well-known 10-fold cross-validation scheme, e.g. 90% of the UEs were generating the training database and the estimation was done for the MDT measurements of the remaining 10% of UEs. That is, the training and the testing database samples were generated always in a call-wise manner where all measurements from one UE belongs always either on the training or the testing database. This was done to avoid too optimistic results in cases where consecutive periodical measurements from one UE are found in training and testing databases. Table II shows 68% and 95% position error (PE) percentile results for different methods in different environments and for 20-by-20 meter and 40-by-40 meter grid cell sizes. As it can be seen from Figure 3, the performances of Mahalanobis distance and Kullback-Leibler Divergence methods are similar in rural environment regardless the grid cell size. However, KLD performs slightly better. For both methods, the 68% positioning error is around 260 meters and 95% positioning error is around 530 meters as shown in Table II.
TABLE II. POSITIONING ERRORS (IDEAL CELL IDENTIFICATION)
Figure 3: Rural positioning accuracy
700 900 1100 1300 1500 1700 1900580
780
980
1180
1380
1580
1700
1213
1415
16
17
2425
2627
28
2930
31
32
3940
4142
43
44
0 200 400 600 8000
68%
95%
Position error (m)
Per
cent
age
MaD 20x20mMaD 40x40mKLD 20x20mKLD 40x40m
Scenario Method For 20-by-20 m Cell For 40-by-40 m Cell
68% PE 95% PE 68% PE 95% PE
Rural (1750m)
MaD 276 m 536 m 274 m 537 m
KLD 262 m 530 m 268 m 532 m
Urban (500m)
Mad 53 m 154 m 59 m 157 m
KLD 38 m 137 m 45 m 145 m
Hetnet Mad 35 m 113 m 35 m 112 m
KLD 21 m 95 m 28 m 99 m
E911 Requirements [13] 50m for 68% PE 150m for 95% PE
2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU)
36

In urban environment for 20-by-20 meter grid the 68% and 95% PE points for MaD method are 53 meters and 154 meters, respectively, whereas the corresponding values for the KLD method are 38 meters and 137 meters, respectively as shown in Figure 4. This indicates that KLD reduces the 68% position error by 28% and 95% positioning error by 11%. Moreover, Table II shows that in Hetnet environment, 68% and 95% PE percentiles for MaD corresponds to 35 meters and 113 meters, respectively, whereas with KLD method the respective errors are 21 meters and 95 meters as shown in Figure 5. This indicates that KLD method reduces the 68% and 95% positioning error performances by 40% and 16%, respectively.
Figure 4: Urban positioning accuracy
In case of 40-by-40 meters grid size, the reductions in performance are around 29% and 12%. Since PE values for MaD do not change when grid size is changed from 40-by-40 meters to 20-by-20 meters, it indicates that KLD method can increase position estimation accuracy as compared to MaD method by using higher resolution for grid cells. It is also worth noting from the KLD that it is capable of fulfilling the North American emergency positioning requirements in Hetnet and urban environments, as in the present study it provides a better 68% PE than 50m and better 95% PE than 150m [1,13].
Figure 5: Hetnet positioning accuracy
I. CONCLUSION
This paper evaluated a performance of RF fingerprint algorithm based on Mahalanobis distance and Kullback-Leibler divergence methods for estimating the geographical location of Minimization of Drive Testing measurements. This study was carried out by processing MDT measurements generated by a LTE system simulator and the fingerprinting accuracy was validated by using a 10-fold cross validation scheme. The performance results indicated that in sparse rural network deployments, the positioning error behavior is similar for both methods. However, in denser urban and Hetnet deployments, Kullback-Leibler divergence method showed better positioning accuracy as compared to MaD method. It was also noticed that when higher resolution grids were used, KLD further improved its performance whereas such improvement was not observed for MaD. The performance improvement was highest in thedensest Hetnet scenario. Therefore, using covariance matrices for training and testing phase signatures and exploiting the interdependencies among the received signal strengths between base stations was found as a promising method for MDT assisted RF fingerprint positioning in LTE.
II. ACKNOWLEDGEMENTS
The authors would like to thank colleagues from Magister Solutions Ltd, Renesas Mobile Europe and University of Jyväskylä for their comments and support through the work.
REFERENCES
[1] T. Wigren, “Adaptive enhanced cell-ID fingerprinting localization by clustering of precise position measurements”, IEEE Trans. Veh. Tech., vol 56, No. 5, pp. 3199-3209, 2007.
[2] S. Ahonen and H. Lahtinen, “Database correction method for GSM localization,” in Proc. VTC—Spring , vol. 4, pp. 2696–2700, 2003.
[3] J. Borokowski, J. Niemälä, and J. Lempiäinen, “Performance of cellID+ RTT hybrid positioning method for UMTS radio networks,” in Proc. 5th Eur. Wireless Conf., 2004, pp. 487–492
[4] P. Bahl and V. N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system”, INFOCOM 2000. In Proc. of 19th Annual Joint Conference of the IEEE Computer and Communications Societies, March 2000.
[5] D. Milioris et al., “Low-dimensional signal-strength fingerprint-based positioning wireless LANs, Ad Hoc Netw.”, 2012, doi:10.1016/j.adhoc.2011.12.006.
[6] V. Honkavirta, “ Location fingerprinting methods in wireless locala area network,” Master’s thesis, Tampere University of Technology, October, 2008.
[7] 3GPP TR 36.805, “Study on minimization of drive-tests in Next Generation Networks”, v.9.0.0, December 2009.
[8] 3GPP TS 37.320, “Radio measurement collection for Minimization of Drive Tests”, v.0.7.0, June 2010.
[9] S. Hämäläinen, H. Sanneck, C. Sartori, "Lte Self-Organising Networks (SON): Network Management Automation for Operational Efficiency", John Wiley and Sons, 2011.
[10] R. De Maesschalck, D. Jouan-Rimbaud, and D. Massart, “The Mahalanobis distance”, Chemometrics and Intelligent Laboratory Systems 50:1–18, 2000.
[11] 3GPP TR 36.814, “Physical Layer Aspects for Evolved UTRA”, version 7.1.0, September 2006.
[12] 3GPP TR 36.214, “Evolved Universal Terrestrial Radio Access (E-UTRA); Physical layer; Measurements”, version 10.1.0, March 2011.
[13] The FCC, Fact Sheet—FCC Wireless 911 Requirements, Jan. 2001.
0 50 100 150 200 2500
68%
95%
Position error (m)
Per
cent
age
KLD (20x20)MaD (20x20)MaD (40x40)KLD (40x40)
0 25 50 75 100 125 1500
68%
95%
Position error (m)
Per
cent
age
KLD (20x20m)MaD (20x20m)MaD (40x40m)KLD (40x40m)
2014 Seventh International Conference on Mobile Computing and Ubiquitous Networking (ICMU)
37