-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
1/51
Aboozar Ghaffari
Engineering Mathematics Course:Solving
Ordinary Differential Equations
Using MATLAB®
University of Tabriz, Department of mechatronic
In the name of GOD
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
2/51
حضرت
سوگواری
ايام
تسليت
عرض
با
ابا عبداهللا الحسين
و عروج مل وتی حضرت
منتظری
عظمی
اهللا
آيت
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
3/51
A first order ordinary differential equation has the formx’ = f
(t,x).
To solve this equation we must find a function x(t) such
thatx‘(t) = f (t, x(t )), for all t .
This means that at every point (t, x(t)) on the graph of x, the
graph must haveslope equal to f (t,x(t)).
We can turn this interpretation around to give a geometric view
of whata differential equation is, and what it means to solve the
equation.
Imagine, if you can, a small line segment attached to each point
(t, x)with slope f (t,x).
This collection of lines is called a direction line field, and
it provides the geometric interpretation of a differential
equation.
To find a solution we must find a curve in the plane which is
tangent ateach point to the direction line at that point.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
4/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
5/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
6/51
Appendix: Downloading and Installing the Software Used in This
Manual The MATLAB programs dfield, pplane, and odesolve, and the
solvers eul, rk2, and rk4 described in this manual
are not distributed with MATLAB. They are MATLAB function
M-files and are available for download over theinternet.
However, odesolve is new, and only works with MATLAB ver 6.0 and
later. The solvers are the same for allversions of MATLAB.
The following three step procedure will insure a correct
installation, but the only important point is that the filesmust be
saved as MATLAB M-files in a directory on the MATLAB path.
• Create a new directory with the name odetools (or choose a
name of your own). It can be located
anywhere on your directory tree, but put it somewhere where you
can find it later.
• In your browser, go to http://math.rice.edu/~dfield/. For each
file you wish to download,
click on the link. In Internet Explorer, you are given the
option to save the file.. In either
case, save the file with the subscript .m in the directory
odetools.
• Open the path tool by executing the command pathtool in the
MATLAB command window, or by
selecting File→Set Path .... Follow the instructions for adding
the directory odetools to the path.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
7/51
Euler’s Method
We want to find an approximate solution to the initial
valueproblem y’ = f (t,y), with y(a) = y0,on the interval
[a,b].
In Euler’s very geometric method, we go along the tangent line
tothe graph of the solution to find the next approximation.
We start by setting t0 = a and choosing a step size h. Then we
inductively define
yk+1 = yk + h*f (tk, yk),
tk+1 = tk + h,
for k = 0, 1, 2, . . . , N, where N is large enough so that
tN ≥ b.
This algorithm is available in the MATLAB command eul.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
8/51
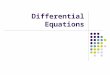
Example 1. Use Euler’s method to plot the
solution of the initial value problem
y’ = y + t, y(0) = 1 (5.2) on the interval [0, 3] .
Note that the differential equation in (5.2) is in normal
form y’ = f (t,y), where f ‘(t,y) = y + t .
Before invoking the eul routine, you must first write afunction
M-file
function yprime = yplust(t,y)
yprime = y + t;
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
9/51
>> yplust(1,2)ans = 3
Now that your function M-file is operational, it’s time to
invokethe eul routine. The general syntax
is[t,y]=eul(@yplust,tspan,y0,stepsize)
where yplust is the name of the function M-file, tspan is the
vector[t0,tfinal] containing the initial and final time conditions,
y0 is they-value of the initial condition, and stepsize is the step
size to beused in Euler’s method.
Actually, the step size is an optional parameter. If you enter
thisprogram will choose a default step size equal to
(tfinal-t0)/100.
[t,y]=eul(@yplust,tspan,y0)
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
10/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
11/51
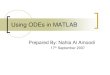
Note how the error decreases, but the
computation time increases as you
reduce the step size.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
12/51
log10(maximum error) = A + B log10(step size),
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
13/51
The Second Order Runge-Kutta Method
What is needed are solution routines that will provide
moreaccuracy without having to drastically reduce the step sizeand
therefore increase the computation time.
The Runge-Kutta routines are designed to do just that. The
simplest of these, the Runge-Kutta method of order two,
issometimes called the improved Euler’s method.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
14/51
Again, we want to find a approximate solution of the
initialvalue problem y’ = f (t,y), with y(a) = y0, on the
interval [a, b].
As before, we set t0 = a, choose a step size h, and then
inductivelydefine
s1 = f (tk, yk),s2 = f (tk + h, yk + hs1),
yk+1 = yk + h(s1 + s2)/2,
tk+1 = tk + h,
for k = 0, 1, 2, . . . , N, where N is large enough so that
tN ≥ b. This algorithm is available in the M-file rk2.m, which
is listed in
the appendix of this chapter.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
15/51
The syntax for using rk2 is exactly the same as the syntaxused
for eul.
As the name indicates, it is a second order method, so,
if yk isthe calculate approximation at tk, and y(tk) is the
exact solution
evaluated at tk, then there is a constant C such that
| y(tk) − yk| ≤ C|h|^2, for all k.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
16/51
The Fourth Order Runge-Kutta Method
This is the final method we want to consider. We want to find an
approximate solution to the initial value problem y
= f (t,y), with y(a) = y0, on the interval [a, b].
We set t0 = a and choose a step size h. Then we inductively
define
for k = 0,
s1 = f (tk, yk),s2 = f (tk + h/2, yk + hs1/2),
s3 = f (tk + h/2, yk + hs2/2),
s4 = f (tk + h, yk + hs3),
yk+1 = yk + h(s1 + 2s2 + 2s3 + s4)/6,
tk+1 = tk + h,
1, 2, . . . , N, where N is large enough so that tN ≥ b.
This algorithm is availablein the M-file rk4.m, which is listed in
the appendix of this chapter.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
17/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
18/51
Introduction to PPLANE7
A planar system is a system of differential equations of
the formx’ =f (t, x, y),
y’ =g(t, x, y). (7.1)
The variable t in system (7.1) usually represents time and is
called
the independent variable. Frequently, the right-hand sides of
the differential equations do
not explicitly involve the variable t , and can be written in
theform
x’ = f (x, y), y’ = g(x, y). (7.2)
Such a system is called autonomous.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
19/51
System (7.1) can be written as the vector equation
If we let x’ = [x,y]’ , then x’ = [x’,y’]’ and equation
(7.4)becomes
x’ = F(t, x).
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
20/51
MATLAB’s built-in numerical solvers
This is one of the most important chapters in this manual.
Herewe will describe how to use
MATLAB’s built-in numerical solvers to find approximatesolutions
to almost any system of differential equations. At thispoint
readers might be thinking, “I’ve got dfield6 and pplane6 andI’m all
set.
I don’t need to know anything further about numerical
solvers.”Unfortunately, this would be far from the truth.
For example, how would we handle a system modeling a driven,
damped oscillator such as X1’ = x2,
x2 ‘= −2x1 − 3x2 + cos t.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
21/51
A new suite of ODE solvers was introduced with version 5
ofMATLAB.
The suite now contains the seven solvers ode23, ode45,ode113,
ode15s, ode23s, ode23t, and ode23tb.
We will spend most of our time discussing the generalpurpose
solver ode45. We will also briefly discuss ode15s, anexcellent
solver for stiff systems.
Although we will not discuss the other solvers, it isimportant
to realize that the calling syntax is the same foreach solver in
MATLAB’s suite.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
22/51
Single First Order Differential
Equations
We are looking at an initial value problem of the formx’ = f
(t,x), with x(t0) = x0.
The calling syntax for using ode45 to find an
approximatesolution is
ode45(odefcn,tspan,x0),
where odefcn calls for a functional evaluation of
f (t,x), tspan=[t0,tfinal] is a vector containing
the initial and final
times, and x0 is the x-value of the initial condition
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
23/51
Example 1.
Use ode 5 to plot the
solution of the initial value problem
x = cos t/( 2x − 2) , x(0) = 3, (8.3)on the interval [0,
2π].
Note that equation (8.3) is in normal form x = f (t,x), where f
(t,x) = cost/(2x − 2).
From the data we have tspan = [0,2*pi] and x0 = 3. We need to
encode
the odefcn. Open your editor and create an ODE function M-file
with the contentsfunction xprime = ch8examp1(t,x)xprime =
cos(t)/(2*x - 2);>> [t,x] = ode45(@ch8examp1,[0,2*pi],3);
>> plot(t,x)>> title('The solution of x''=cos(t)/(2x
- 2), with x(0) = 3.')>> xlabel('t'), ylabel('x'), grid
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
24/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
25/51
Systems of First Order Equations
Actually, systems are no harder to handle using ode45 than are
singleequations.
Consider the following system of n first order differential
equations:
x1’ = f1(t, x1, x2, . . . , xn),x2’ = f2(t, x1, x2, . . . ,
xn),
...
xn’ = fn(t, x1, x2, . . . , xn).
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
26/51
If we define the vector x = [x1, x2, . . . , xn]’ , system (8.6)
becomes
Finally, if we define F(t, x) = [f1(t, x), f2(t, x), . . . ,
fn(t, x)]T , thensystem (8.7) can be written as
X’ = F(t, x),
which, most importantly, has a form identical to the single
first orderdifferential equation, x = f (t,x), used in Example 1.
Consequently, if
function xprime=F(t,x) is the first line of a function ODE file,
it isextremely important that you understand that x is a vector
with entriesx(1), x(2),..., x(n).
Confused? Perhaps a few examples will clear the waters.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
27/51
Example 3.
Use ode 5 to solve the
initial value problem
Equation (8.9)
on the interval [0, 10], with initial conditions x1(0) = 0 and
x2(0) = 1. We can write system (8.9) as the vector equation
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
28/51
Open your editor and create the following ODE file6.function
xprime = F(t,x)
xprime = zeros(2,1); %The output must be column vector
xprime(1) = x(2) - x(1)^2;xprime(2) = -x(1) - 2*x(1)*x(2);
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
29/51
Before we call ode45, we must establish the initial
condition.Recall that the initial conditions for system (8.9) were
given asx1(0) = 0 and x2(0) = 1. Consequently, our initial
condition vector willbe
>> [t,x] = ode45(@F,[0,10],[0;1]);
>> plot(t,x)
>> title('x_1'' = x_2 - x_1^2 and x_2'' = -x_1 -
2x_1x_2')
>> xlabel('t'), ylabel('x_1 and x_2')
>> legend('x_1','x_2'), grid
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
30/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
31/51
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
32/51
Solving systems with eul rk2 and rk4.
These solvers, introduced in Chapter 5, can also beused to solve
systems. The syntax for doing so is not toodifferent from that used
with ode45. For example, to solvethe system in (8.9) with eul, we
use the command
>> [t,x] = eul(@F,[0,10],[0;1],h);
where h is the chosen step size. To use a different solver it
isonly necessary to replace eul with the rk2 or rk4. Thus, theonly
difference between using one of these solvers and ode45is that it
is necessary to add the step size as an additionalparameter.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
33/51
Second Order Differential Equations
To solve a single second order differential equation it
isnecessary to replace it with the equivalent first order
system.For the equation
y’’ = f (t,y,y’), (8.11)
we set x1 = y, and x2 = y’. Then x = [x1, x2]’ is a solution
tothe first order system
x1’ = x2,
x2’ = f (t,x1, x2).
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
34/51
Example 4
Plot the solution of the initial value problemY’’ + yy’ + y = 0,
y(0) = 0, y’(0) = 1, on the interval [0, 10].
First, solve the equation in (8.13) for y’’.
Y’’ = − yy −’y ( 8.14)
Introduce new variables for y’ and y.x1 = y and x2 = y’
Then we have
X1’ = y’ = x2, and x2’ = y’’ = − yy’ − y = −x1x2 − x1,
or, more simply,X1’= x2,
X2’ = −x1x2 − x1.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
35/51
function xprime = dfile(t,x)xprime = zeros(2,1);
xprime(1) = x(2);
xprime(2) = -x(1)*x(2) - x(1);function ch8examp4
[t,x] = ode45(@dfile,[0,10],[0;1]);
plot(t,x(:,1))
title('y'''' + yy'' + y = 0, y(0) = 0, y''(0) = 1')
xlabel('t'), ylabel('y'), grid
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
36/51
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
37/51
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
38/51
Starting odesolve
The interface of odesolve is very similar to those found
indfield and pplane. To begin, execute
>> odesolve
at the MATLAB prompt. This opens the ODESOLVE Setupwindow. An
example can be seen in
One of the most important is the edit box for the number
ofequations.
Change this number to 20 and depress the Tab or Enter key.The
setup window expands to allow the entry of 20equations and the
corresponding initial conditions.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
39/51
Example 1. Consider the two massesm1 andm2 connected by
springsand driven by an external force, as
illustrated in Figure 9.1. In the absence of the force, each of
the masses has anequilibrium position.
Let x and y denote the displacements of the masses from their
equilibrium positions, asshown in Figure 9.1.
Plot the displacements for a variety of values of the parameters
and external forces
Analysis of the forces and Newton’s second law lead us to the
system ofequationsm1*x ‘’= k2(y − x) − k1x,
m2*y ‘’= −k2(y − x) + f (t),
(9.1)
where k1 and k2 are the spring constants, and f (t) is the
external force.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
40/51
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
41/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
42/51
Solving Ordinary Differential Equations
Using Symbolic ToolBox
The routine dsolve is probably the most useful
differentialequations tool in the Symbolic Toolbox.
To get a quick description of this routine, enter help
dsolve.
The best way to learn the syntax of dsolve is to look at
anexample.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
43/51
Example 3. Find the general solution of the first
orderdifferential equation
The Symbolic Toolbox easily finds the general solution of
thedifferential equation in (10.3) with the command
>> dsolve('Dy + y = t*exp(t)')
ans =
1/2*t*exp(t)-1/4*exp(t)+exp(-t)*C1
Notice that dsolve requires that the differential equation
beentered as a string, delimited with single quotes.
The notation Dy is used for y’, D2y for y’’, etc.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
44/51
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
45/51
>> y = dsolve('Dy + y = t*exp(t)','t')y =
1/2*t*exp(t)-1/4*exp(t)+exp(-t)*C1 The command>>
pretty(y)
1/2 t exp(t) - 1/4 exp(t) + exp(-t) C1 gives us a nicer display
of the output.
Substituting values and plotting.
Let’s substitute a number for the constant C1 and obtain a plot
ofthe result on the time interval [−1, 3]. The commands
>> syms C1;
>> y = subs(y,C1,2)
y =
1/2*t*exp(t)-1/4*exp(t)+2*exp(-t)
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
46/51
replace the variable C1 in the symbolic expression y with the
value of C1 inMATLAB’s workspace. MATLAB’s ezplot command has been
overloaded forsymbolic objects, and the command
>> ezplot(y,[-1,3]) will produce an image similar to that
in Figure 10.1. Execute help sym/ezplot to
learn about the many options available in ezplot.
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
47/51
Solving Systems of Ordinary Differential
Equations
The routine dsolve solves systems of equations almost as easily
asit does single equations, as long
as there actually is an analytical solution.
Example 5. Find the solution of the initial value problem
x ‘= −2x − 3y,
y ‘= 3x − 2y,
(10.5), with x(0) = 1 and y(0) = −1.
We can call dsolve in the usual manner. Readers will note that
theinput to dsolve in this example parallels that in Examples 3 and
4.The difference lies in the output variable(s).
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
48/51
If a single variable is used to gather the output, then the
Symbolic Toolbox returns a MATLAB structure5.
A structure is an object which has user defined fields, each of
which is a MATLAB object. In this case the fields are symbolic
objectscontaining the components of the solution6 of system (10.5).
Thus the command
>> S = dsolve('Dx = -2*x - 3*y,Dy = 3*x-2*y', 'x(0) =
1,y(0) = -1','t')
S =
x: [1x1 sym]
y: [1x1 sym]
produces the structure S with fields
>> S.xans =
exp(-2*t)*(cos(3*t)+sin(3*t))
>> S.y
ans =
exp(-2*t)*(sin(3*t)-cos(3*t))
It is also possible to output the components of the solution
directly with the command
>> [x,y] = dsolve('Dx = -2*x-3*y,Dy = 3*x-2*y','x(0) = 1,
y(0) = -1','t')
x =
exp(-2*t)*(cos(3*t)+sin(3*t))
y =
exp(-2*t)*(sin(3*t)-cos(3*t))
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
49/51
Each component of the solution can be plotted versus t with the
following sequence of commands.
>> ezplot(x,[0,2*pi])
>> hold on
>> ezplot(y,[0,2*pi])
>> legend('x','y')
>> hold off
Adjust the view with the axis command, and add a title and axis
labels.>> axis([0,2*pi,-1.2,1.2])
>> title('Solutions of x'' = -2x-3y, y'' = 3x-2y, x(0) =
1, y(0) = -1.')
>> xlabel('Time t')
>> ylabel('x and y')
This should produce an image similar to that in Figure 10.3. We
used the Property Editor to makeone of the curves dashed.
It is also possible to produce a phase-plane plot of the
solution. With the structure output the basiccommand is simply
ezplot(S.x,S.y). After some editing we get Figure 10.4
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
50/51
[email protected]
-
8/16/2019 Ordinary Differential Equations (Ode) Solving Using
Matlab
51/51