Embed Size (px)
Citation preview

Pergamon
Acra Astronautica Vol. 38, Nos 4-8, Copyright 8 !996 btemational Astronautical Federation. Published by E P,
p. 437-443, 1996 sewer Snence. Ltd
Printed in Great Britain
PII: SOO94-5765(96)00016-l 009~5765/96 $15.00 + 0.00
ORBITAL AND OTHER PRODUCTS OF THE INTERNATIONAL GPS
SERVICE FOR GEODYNAMICS (IGS)
J.M. Dow, T. Martfn-MIX. J. Feltens’, C. Garcia-Marthez”, M. Bayona Perez**
EM/European Space Operations Centre Darmstadt. Germany
‘EDS-mbp at ESOC;**GMV at ESOC
Abstract
The paper reviews the current status of the routine prod- ucts of the International GPS Service for Geodynamics (IGS) from the point of view of one cf the many partic- ipating institutions. Stie recent developments are highlighted. These include monitoring of the earth’s ionosphere.
Iutroductioo
The International GPS Geodynamics Service (IGS) be- came operational on 1 January 1994. following an ex- tended period of testing which began with the three ma& IGS-92 Campaign in the swllmerof 1992,ad continued through a Pilot Service from November 1992’. A large number of Agencies and Institutions are involved in the various aspects of this operation: track- ing the GPS satellites; retrieving and formatting data; providing archiving and retrieval facilities for users: analysing the data: assessing the results; and overseeing the functioning of the service. In addition to determin- ing the orbits of the complete GPS constellation (with accuracy currently at the levei of 10 cm). the IGS sup- plies mutineiy to the International Earth Rotation Serv- ice (IERS) solutions for earth aientatim and global station coordinate solutions. which am essential for the maintenance of the IERS terrestrial reference frame (ITRF). Some cenhes am striving to provide orbital and regional position determinations with yet-y ahat &lays in order to facilitate. rapid analysis of earthquake move- ments Ionospheric products. which in turn provide im- proved orbit determinatim capability for other applicationa. am becaning available.
ESA ia participating in IGS with its GPS Tracking and Data Analysis Facility. High quality receivers and asso- ciated communications equipment are installed at glo- bally distributed ESA ground stations Data from
curmntly about 50 stations from the IGS network are re- trieved daily from a global data cenue. and are processed to compute orbits for the complete GPS constellation. station coordinates. earth a&nation parameters. and clock corrections The paper reports on the status of IGS
Copyright 8 1995 by the International Astm- nautical Federation. All rights reserved.
products of particular interest for crbital dynamics appli- cations, with the aim of providing an idea of the current status of the IGS from the point of view of one of the many institutions involved.
The KS
The objectives of the IGS are to support. thrargh GPS products. geodetic and geophysical research. and also a range of operational activities performed by govemmen- tal and selected commercial organisations’. The main products are:
*high accuracy GPS satellite ephemerides; *earth rotation parameters; *coordinates and velocities of trlrcking stations; l GPS satellite and ground receiver clock corrections: *ionospheric information.
Applications currently beiig supported by these prod- ucts include: l realization of globsl accessibility to and improve- ment of the IERS Terrestrial Reference Frame lTRF. which is today the standard earth-fixed refer- ence frame for precise positioning and geodetic research (maintained by the Intematirmal Earth Rotation Service IERS); l mcoitoring of earth rotation (polar motion and varia-
tions in url); l scientific orbit determination. notably the case of TOPEX/Poseidon; l maritoring of deformations of the solid and liquid earth; *atmospheric investigations, includJng tropospheric and ionospheric monitoring.
Data from more than 80 stations (mid-EM) which are permanently tracking the GPS satellites flow daily
through a number of Regional and Operational Data Cenms into one of the three Global Data Centms (locat- ed respectively at CDDIS in INASA/GSFC. Greenbelt; IGN. Paris; and Scripps Iminm of Oceanography SIO. San Diego). Them are seven Analysis Centres. located at the University of Bern: Natural Resources of Canada NRCan. Ottawa; ESA/ESOC: GFZ. Potsdam; JPL. Pa- sadena; NOAA. Silver Spring: and SIO. San Diego. The Analysis Centres (AC) retrieve data from one of the Glo- bal Data Centres. and return to the latter their solutions
437

438 46th IAF Congress
for the GPS satellite orbits. earth orientation (polar mo- tion and UT1 variations). and satellite clock conections. The. orbital solutions are combined into an official IGS solution. which is made available to interested users within about 10 days from the date of data collection. The orbit combination is the responsibility of the Analy- sis Centre Coordinator. a function being carried out by the MCan Analysis Ceatre. The IGS earth pole solu- tions are now an essential component in the earth orien- tation parameters generated and distributed by the WS. due to the high temporal resoludon and consistent accu- racy and availability of the GPS solutions (equivalent to about I cm at the earth’s surface. with 24 hour resolu- tion). The routine coordination of the IGS. including in- terfaces with external bodies such as the IERS, is perfotmed by a Central Bureau located at JPL. while the overall policy is determined by a Governing Board, in which the active elements of the IGS are represented.
An IGS Information System has been set up to provide a central reference data base describing for example the configuration of the IGS sites and the Analysis Ceatre processing models. as well as information cm the availa- ble products and how to access them. Connection to the IGS Lnformation Service is by anonymous ftp at Internet node igscb.jpl.nasa.gov (directory /igscb). or through the World Wide Web at http://igscb.jpl.aasa.gov/.
ESA GPS-TDAF
In order to develop support capability for future ESA projects involving GPS. ESOC is developing a GPS Tracking and Data Analysis Facility (GPS-TDAF). A pi-
lot version of this is beiig used in the Operational Data Ceatre and Analysis Centre activities being carried out for IGS. The emphasis is on the use of on-board GPS i-e- ceive-rs for orbit determination. including applications which may have very stringent accuracy requirements.
The objectives of the ESA GPS-TDAF can be summa- rised as follows:
*establishment of a network of high precision geo-
detic GPS receivers on ESA ground sites. including
communications to ESOC:
*development of software for fast. automatic transfer of data from the stations followed by decornpres- sioa. quality control. reformatting. and further rout- ing to global and other external data ceatres:
*advanced software for processing GPS data. solving for the orbits of the GPS satellites. station positions and motions, and earth orientation parameters; *me degradation of the accuracy of some types of GPS measurement by Selective Availabilitv (SA) and Anti-Spoofing (A/S) should be minim&d or even eliminated:
*monitoring of offsets and variations in GPS satellite clocks and ground receiver clocks;
*active participation in the IGS; *ionospheric mapping in near-real time for ES.4 track-
ing stations. providing support to all ESA satellites being tracked from these sites, and eliminating the need for complex and inaccurate models of ioao-
spheric propagation corrections in orbit determina- tion: *monitoring of the ionosphere. satellite clocks and satellite and signal health in near-real time will pro- vide the potential of providing measurement correc- tions of essential interest to users of GPS signals for navigation purposes (vehicles on or near the earth’s surface):
*orbit determination for earth satellites equipped with on-board GPS receivers. Navigation for future sci- ence and earth observation missions and In-orbit Infrastructure is envisaged. The TOPEX/Poseidoa spacecraft. launched in August 1992. has provided a first test data set with high precision measurements’“.‘.
The central part of the GPS-TDAF. involving the simul- taneous computation of multiple orbits and many asscci- ated geophysical. geodetic. satellite- and tracking system-specific parameters. has developed out of a more general software facility for handling orbit determination for a wide range of earth satellite application@.
So far. high quality GPS receivers have been installed in five ESA stations: Maspalomas (Gran Canaria. Spain) in June 1992; Kourou (French Guyana) in August 1992: Kinma (Sweden) in July 1993; Perth (Western Australia) in August 1993: and Villafranca, near Madrid (Spain) in November 1994. A further installation at Malindi. Kenya is being prepared to begin operations in October 1995. making it the second permanent GPS station on the Afri- can continent. and the third oa the African plate. (Harte- beesthoek in South Ahica and Maspalomas are the others.) A survey of these and other stations was made in 1991 by the TH Darmstadt and University of Bern in connection with the GIG’91 Campaign’.
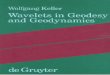
The GPS-TDAF system confiiation is shown in Figure I . It is structured in three levels: a hardware/canmunica- tions layer; a software layer; and an operations layer. At the core of the system is the Data Analysis software. which performs the numerical computations. The Soft- ware In.frastructum supports this with utilities for data re- ttieval. conversion. storage, archiving . . . . . and deals with the execution and monitoring of the automatic (or if te- quired. manual) operations. Overall control of the data acquisition is maintained by a Unix based workstation lo- cated at ESOC. rum&g an automatic script and a com- munication program. The basic approach to communicadoa with the station is with the Xmodem pro- tocol through high performance modems over the public telephone network A ma-e reliable appoach. which is adopted when it is available, is to share the use of an ex- isting. high capacity leased line to the station The trans- fer is then initiated with the Zmodem protocol. and the standard X.25 protocol is used between the packet assem- bler/disassembler (PAD) installed at the ESOC Commu- nications Centre and that at the station. In this case. it is more convenient to commtmicate with a PC oa the sta- tion. rather than with the receiver directly (lack of flow conaol from the receiver). Typical data rates am 6-8 kb/ s with both methods. In the curreat daily downloads, about 0.5 MBytes of data per station are retrieved (30 s sampling).

46:h IAF Congress 439
GPS IDAF I
GPS TDAF Coufiruration LweQ
ESOC Routine IGS Activities
Typically about 50 stations are now processed daily, the data being relieved from CDDIS through the Internet. The RINEX observation files are decompressed and are input into the GPSOBS program, which identifies cycle slips. generates double-differenced phase observations (corrected for ionospheric effects). and computes initial estimates of receiver clock biases. The resulting meas- urement file is input into BAHN. our orbit and geodetic parameter estimation program. which makes a least squares adjustment for all the GPS orbits (including radi- ation pressure parameters). the positions of a number of ground antennas. tropospheric model parameters. phase ambiguities. receiver clock biases and earth orientation parameters (MP’s). A subsequent run of GPSOBS then allows the computation of precise (ns level) satellite clock biases. by post-processing code and carrier phase observations.
Daily solutions for orbits. EOP’s and satellite clocks are sent to CDDIS (and from there to the other two IGS Glo- bal Data Centres). along with a weekly summary file de- suibiig the sohnion. The orbital and clock solutions generated by the seven IGS Analysis Centres are com- bined to form an IGS solutions. This takes advantage of the different algorithms. software, and data sets used by the various analysis centres. and successfully eliminates poor solutions. The rms discrepancies with respect tq the IGS solution has been around 10-20 cm per satellite co- ordinate since me beginning of 1994, even with the ad- vent of A/S at the end of January 1994. and less than 15 cm during 1995. Satellite clock solutions are stable at the level of a few ns. and the frequency dither due to SA can be weti reconstructed. The polar motion parameters, which are forwarded weekly to the International Earth Rotation Service IERS as solution ERP(JZSOC)94 P 01. are determined with 1 day resolution and have accuracy
Figure 1: ESA GPS-TDAF System Configuration
of about 0.3-0.4 masec (I-1.3 cm) when compared with combined solution of the IERS using VLEtI and laser ranging in addition. A fde giving a full description of the current processing assumptions at each Analysis Cenue can be retrieved from the IGS Central Bureau’.
GPS satellite clock information is currently only availa- ble through IGS with 15 minute sampling. which is not sufficient to be able to correct for the effects of Selective Availability (SA). Our clock solutions have recently been successfully applied with I minute sampling to sup- port a time transfer experiment carried out by the Univer- sity Qf Waiest’. Tie transfer at the level of 4 ns was achieved. using a standard. single-frequency receiver. Such clock solutions will be used in evaluating future in- orbit GPS tracking experiments. for example in co~ec-
tion with the flight experiments planned within the ATV Rendezvous Predevelopment (AI&P) programme.
Table I shows the accuracies currently being achieved
Table I: Accuracies of IGS Products (mid-l!%)
Product
Individual AC orbit series (per satellite coordinate)
AWUraCy
7-20 cm
I Combined IGS orbit (per satel- I
IOcm lite coordinate) I
Polar motion (xp. yp)
Excess length of day (LOD)
0.2-0.3 mas
0.03 ms
Horizontal position coordinates
Station heights
0.5-l cm
1-2 cm

440 46th IAF Congress
for the main operational products of the IGS. There has been a very significant improvement in all of these sine the initiation of operational activities in 1992: this can be attributed to a large extent to the continuous feedback be- tween the various Analysis Cenees and the Analysis Centre Coordinator. and to the variety of software and computational approaches available to them.
Terrestrial Referer~ce Frarue and Den&cation
&I IGS Workshop was held at Pasadena in November 1994 on the topic “Densitication of the IERS Terrestrial Reference Frame through Regional GPS Networks*“‘. The motivation for developing this topic within the IGS is to take advantage of the increasing number of regional GPS networks being now being deployed in various parts of the world. The relatively low cost of GPS hardware and operations makes this technique ideal for densifica- tion of the terrestrial reference frame, in pticular for studies of regional deformation (earthquakes. volca- nos....). Tke main outcome of the Workshop was the agreement on a proposal to set up a few Associated Anal- ysis Centres (AA0 to handle this new aspect of IGS ac- tivity: a Type I AAC would have the function of processing GPS data from a dense regional network of GPS receivers: while a Type II AAC would take the out- puts from the AC’s and a number of Type I centres and combine them to obtain routine solutions for station co- ordinates (eg weekly).The interface between these dif- ferent AAC’s should be provided by transmitting solu- tions in a so-called “Software Independent Exchange Format (SINEX)“. which has been developed for this purpose and seems likely to become a standard method of exchanging fully documented solutions. including co- variance information. As an interim measure. to test the feasibility of this proposal. some of the Analysis Cennes are participating in a pilot project from mid-1995 by transmitting a weekly station coordinate solution in the SINEX format to two pilot Type II AAC’s. via the Glc+ bal Data Ceotres.
The solution computed by us for the WS 1994 Annual Report has been a stepping stone in this direction”. The global station coordinate solution SSCESOC) 95 P 01 computed for 1994 by the ESA IGS AC (Martin Mw et al. 1995) is estimated to be accurate to better than I cm. The solution was obtained from the combination of 274 daily arcs of GPS double differenced phase observation equations, using the hfLJLTL4RC program. The stations used were those included in the routine ESOC IGS anal- ysis (about 26 from January to November, about 35 thereafter). They included all the receivers that are kept fixed in the daily solutions. all the ESA receivers and ad- ditional receivers to obtain evenly disaibuted tracking of the GPS satellites. All these stations are equipped with Rogue. MiniRogue or TurboRogue receivers connected to stable atomic frequency standards. Observation arcs were produced for the whole year. but scme arcs were omitted due to data or other modelling problems. AU GPS satellites were used. except those beii manoeu- vred during each particular arc. The ear& orientation was held fixed in this solution at the IERS Bulletin B values. The coordinates of 35 stations and the horizontal veloci- ties of 30 sites were estimated. The full covariance ma-
trix, in the newly defmed SINEX format was submitted to the WS along with the solution: this permits combi- nation with solutions obtained by other centres. even us- ing different types of measurement input (e.g. laser or VLBD.
Atmospheric Research with GPS
One of the m&t promising applications of GPS is in the feld of atmospheric modelling. Comparisons of tropo- spheric model parameters derived routinely by several IGS Analysis Centms has suggested that with sufficient- ly precise measurement of surface pressure at the GPS stations. the dry compoqent of the tropospheric delay could be removed from the total corrections estimated. to give very useful measurements of the wet component of the troposphere. The water vapour content thus mapped over the global network could have applications for weather forecasting. if they could be made available with delays of the order of hours.
An exciting new development which is now being dem- onstrated in-orbit by the GPS-MET experiment is the use of three dimensional atmospheric limb sounding using GPS signals. The technique of tomography. now well- known in medicine and geophysics. can be used to pro- vide profiles of both the neutral and charged atmosphere (troposphere, ionosphere)‘3. These applications were amongst those discussed at a recent IGS Workshop held in Potsdam @Xzdings in press).
Less sophisticated. two dimensional approaches can also be used to provide valuable informati~ on the iono- sphere with only data from ground-based GPS receivers. This is elaborated in the subsequent section.
Ionospheric Monitoring
The global dual-f?equency GPS data used in ESOC’s daily IGS processing will also be exploited to update ion- osphere models on a regular basis. The Ionosphere Mon- itoring Facility (IONMON) software is currently under development. The main function of these ionosphere models will be to support other ESA missions by correct- ing their tracking data for ionospheric effects. e.g. akim- eter and S-band tracking data.
Initially, the IONMON will te based on simple standard models to represent the ionosphere and only invoke so called “single layer” models’“‘s. It will consist of the following components:
l Creation of TEC obsemables: TEC (“Total E~x- aon Content”) observables will be created by com- bining GPS pseudorange and carrier phase observations. To first order the ionospbere delays GPS code and carrier by the same amount but With Ihe opposite sign: carrier phases are advanced. wme cc&e data are delayed. Apart from different noise level and different magnitude of multiparh effects. code group delays and ~amh phase adv~ should only differ by the ambiguity innin- sic in the carrier phase measurements. Combination is done by cakulatiag f&r Satellite-Station pairs the

46th IAF Congress 441
mean offsets between pseudorange and carrier phase values (expressed in metres) over arcs with- out carrier phase breaks. These mean offsets are considered as the best available carrier phase bias values and subtracted from the carrier phases to nzmove the carriex phase ambiguities. The new obsexvables have then the smooth characteristics of the carrier phases and are rid of the phase ambiguity terms. Fiially they are converted from meters into TECU (1 TECU is lOI electrons/m’, correspond- ing to a zenith delay of about 10 cm at S-band fre- quencies). These TEC obsetvables then eater as observations into the ionosphere parameter estima- tion process.
*Reference frame: lntemally the IONh4ON will use geomagnetic latitude/lccal time as reference. Exter- nally the ionosphere models will be represented in geographic ccordinates.
*Mapping functions: TEC obsetvables are derived from GPS data which has been collected from ground stations to aU visible GPS satellites above the horizon. i.e. the TEC observables are referred to many different slant directions across the sky. To incorporate them in an ionosphere model. tbey must be referred to some common reference. Such a com- mon reference is the Vertical Total Electron Con- tent (VIEO. The VIEC is obtained by mapping slant range TEC to the vertical, using some multi- plicative mapping function. Since the standard map- ping function (cosine of the elevation angle as measured at the ionospheric intersection point) becomes infinite at low elevations. the socalled “Q- factor” functionus will be offered by the IONMON as an alternative. *Ionosphere models: Generally the observation
equations wiU relate observed TEC values to the ionospheric modelling as follows:
TECOh = Map(el) . VTEC(<, ~5) + kj + X-’
where:
TEC,,,,, is the TFC observable.
!Wr.p(e~l is the elevation dependent mapping function value. WC&r) is a VTEC repesentation model. depending on geomagnetic latitude 5 and local time T. k, is the differential receiver hardware delay,
Jcr is the differential satellite hardware delay.
*All quantities in the above equation are referred to a TEC observable made between ground station j and satellite i (The measurement noise and other unmodelled errors have of course to be added.) Dif- ferential delays are caused by different electronic paths the GPS LI and L2 signals have to pass within receiver and satellite hardware and are indi- vidually different for each receiver and each satellite’s*17. To obtain accurate results. differential delays must be accounted for in precise ionospheric parameter estimations. Usually they are estimated as elevation-independent constants together with the icmospheric parameters. To avoid singularities
in the normal equation system. at least one of these differential delays should be kept fixed to an a priori known value. The first IONMON version wiU basi- cally offer three models to represent WEC(s.51 as single layer: (i) For local applications a 2-variable polynomial model will be used to represent the ion- osphere as a higher order surface; (ii) For regional and global applications surface spherical harmonic expansions wiU be used: (iii) For global applica- tions GE(=Gauss Exponential)-functions can alter- natively be invoked.
l Parameter estimation algorithms: Standard algo- rithms will be used for the ionospheric parameter estimation, namely a least squares algorithm for fits in batch mode. and a Kalman filter algorithm for fits in sequential mode. An application of weights and constraints wiU be possible.
An analysis to study the long-term stability and smooth- ness of time sequences estimated ionosphere models and the day-today scatter of estimated differential delays is currently under preparation using prototype software and shall extend over several months.
Satellite and receiver differential delay values were esti- mated on three successive days in April 1995. From a global set of 39 ground stations, nighttime data was used to estimate in 24 hour intetvals the satellite and receiver differential delay values together with the nighttime VTEC represented by degree 4 and order 2 spherical
harmonics. Ground stations located closer than 2.5 degr. to the geomaguetic equator were excluded. The estimat- ed satellite differential delays values showed over these three days a day-to-day scatter well within a 0.5 ns limit. and comparisons with values of an external institution confirmed this accuracy. However, for the receiver dif- ferential delays this 0.5 ns limit was sometimes consid- erably exceeded - possibly for some of the stations the amount of data was not sufficient. The satellite differen- tial delay values obtained from these fits were introduced as constraints into ali other polynomial and spherical har- monic tits.
The performance of polynomial fits to local data was verified separately for seven ground stations which where chosen such that each latitude zone was coveted. For high and mean latitudes a polynomial of degree 1 in geomagnetic latitude and order 2 in local time was ap- proriate. while in the equatorial region the order in local time had to be increased to 3. Fits were done in 6 hour intervals. Most of the residuals do not exceed 2 TECX. The spherical harmonic approach was verified by using data of 35 globally distributed ground stations. Degree and order n.m = 15 spherical harmonics were fitted to these data in 6 hour intervals. The VTEC residuals show typically a range around 1 TECU. At some stations. e.g. at equatorial station Kourou. French Guyana, VTEC re- siduals up to 3 TFCU could lx observed. GE-functions are a class of Gauss-type exponential functions which seem to be capable of representing global VTEC in a manner comparable to low degree and order spherical harmonics, e.g. rt_m = 4. The method is still under de- velopment. Again the global set of 35 ground stations was used to perform fits in 6 hour intervals. The VTEC

442 46th IAF Congress
residuals obtained at different ground stations show a difference Phase Observable.% COSPAR 30th Scien- range between I and 5 TECU. Comparions of all three tific Assembly. Hamburg. July 1994. Adv. in Space single layer approaches with external VTEC maps. and Res.. Vol. 16. No. 12. 1995. an analysis of VTEC residuals obtained at ground sta- 6. Dow J.M.. T.J. MartIn Mur and M.M. Romay Merino: tions of which no data was used for the fits, indicated that ESA’s precise Orbit Determination Facility. ESA
a general accuracy of better than 5 TECU was main- Bulletin No. 78. May 1994.
tained. 7. Rothacher, M., M. Becker. G. Bet&r. E. Brockmann.
Initially restricted to single layer modefs. the IONMON will be extended in further steps of software develop- ment in the following directions:
l Replacement of the single layers by vertical profile VI-EC functions;
8.
l Use of other than GPS tracking data to derive TEC obsetvables. namely GLONASS. PRARE. DORIS; 9.
* Inclusion of satellite to satellite tracking data into the IONMON processing.
T. Friedfi. E. Groten. Z.W. Hou. L. Mervart. K. Sauermann: Location of ESA Tracking Sites by
GPS. Final report on ESOC Contract 9166/90/D/ IM(S0.1992.
Beutler. G.. J. Kwba and T. Springer (1993): Com- bining the Orbits of the IGS Processing Centres. Proc. of the IGS hafysis Cenne Workshop. Ottawa. 12-14 October 1993.
Liu. R., W. Gunner. J.F. Zumberge, R.E. Neilan: Introducing the Central Bureau Information Scrvicc of the IGS. IGS Resource Information. IGS Central Bureau. July 1995.
Conclusion and Outlook
Activities of t& International GPS Geodynamics Serv- ice have been described. ESOC is participating both as a supplier of GPS tracking data (through ground station in- stallations and communications facilities) and as an Analysis Centre. The IGS orbital solutions are showing pm&ions around 10 cm. even in the presence of Anti- Spoofmg. Earth orientation and station positions are be- ing determined with cm accuracy . For more details. the (first) IGS Annual Report (for 1994) is recommended’“. The ESA GPS Tracking and Data Analysis Facility is W-I- der development and prototype versions am supporting the IGS activity and analyses of on-board GPS”.
13. Melbourne. W.. E.S. Davis. C.B. Duncan. G.A. Haj. KR. Hardy, E.R Kursimski. T.K. Meeban. L.E. Ymmg. TI? Yunck: The Application of Spaceborne GPS to Atmospheric Limb Sounding and Global Change Mcnitoring. JPL Publication 94-18. April 1994. Acknowledgments
This work would not havebeen oossible without contin- 14. Lanyi, G.E. and T. Roth: A Comparison of mapped
10. Melgaard. T.E.. D. Last. B. Thomas: Precix Time Transfer to a Moving Vehicle. ION GPS-95 Meet- ing. Palm Springs. September 1995.
11. Zumkrge. J.F. and R. Liu fed.): Densihcation of the IERS Tesrrestriai Reference Frame through Regional GPS Networks. Proc. of IGS Workshop. Pasadena. November 1994.
12. Martin Mtn. T.J.. J.M. Dow. J. Feltens. C. Garcia Martinez: Annual report from the ESOC/IGS Analy- sis Cenne to the lER.5 for 1994. ESA/ESOC. March 1995.
uous interaction during the past years with many col- leagues involved in the IGS. Mate&i supplied by the IGS Chairman (G. Beutler) and the Central Bureau is gratefully acknowledged.
15.
References
1. Zumbexge, J.. RE. Neilan, G. Beutler. W. Gurmer: The International GPS Service for Geuiynamics - Benefit to Users. Proc. of ION GPS-94.7th Intema- tional Technical Meeting. Salt Lake City, Utah. Sep- tember 20-23.1994.
2. International GPS Service for Geodynamics Terms of 16. Reference. IGS Resource Information, IGS Central Bureau, July 1995.
3. Yunck. T.P.. WI. Bertiger, S.C. Wu. YE. Bar-Sever, E.J. Christensen. B.J. Haines. SM. Lichten. R.J. Muellerschcen. Y. Vigue and P Willis: Fit Assess- 17. ment of GPS-based reduced dynamic Orbit Determi- nation on TOPEX/Poseidon. Geophysical Research Letters.Vol.21.No. 7.pp. 541-544.April 1994.
4. Casotto. S.. , M. Romay-Merino. T. Mar&-Mur, J.M. Dow: Sub-deciitre Determination of the TOPEX/ 18. Poseidon Orbit. OAD WP No. 544, ESA/ESOC. August 1994.
5. Ca~otto, S.. J.M. DOW, T. Martin-Murz TOPEX/Posei- don Precise Orbit Determination using GPS double
and measwd Total Ionospheric Electron Content using Global Positioning System and Beacon Satel- lite Observations. Radio Science. Vol. 23. No. 4. pages 483492. July-August 1988. Mannucci. AJ.. B.D. Wilson and C.D. Edwards: A New Method for Monitoring the Earth’s Iono- spheric Total Electron Content Using the GPS Glo- bal Network. Proceedings of the ION GPS-93. 6th International Technical Meeting of The Satellite Divison of The Institute of Navigation. Salt Lake City. Utah. U.S.A.. September 22-24, 1993. Vol. If. pages 1323-1332. Newby, S.P.: An Assessment of Empirical Models for the Prediction of the Transionaspheric Propaga- tion Delay of Radio Signals. University of New Brunswick. Dept. of Surveying and Engiieering. Canada. Technical Report No. 160. August 1992. Wanninger. L.: Der Eiiul3 der Ionosph&re auf die Positicctienmg mit GPS. Dissertation. Wissen- schafthche Arbeiten der Fachrichtung Vermessung- swesen der Universitit Hatmover. ISSN 0174 - 1454. Januq 1994. Wild. U.: Ionosphere and Geodetic Satellite Sys- tems: Permanent GPS Tracking Data for Modelling and Monitoring. Dissertation, Astronomical Insti- tute of the University of Beme. SwiQerland. Febru-
ary 1994.

46th IAF Congress 443
19. Zumberge. IF.. R. Liu. R. Neilan ted.): International GPS Service for Geodynamics hnual Report 1994. IGS Central Bureau. Preliminaty Edition. June 30. 1995.
20. Martin Mur. T.. J. Dow. N. Bondarenco. S. Casotto. J. Fe&ens. C. Garcia Marthez: Use of Precise and Operational Orbit Detezmination at ESOC. ION GPS-95 Meeting. Palm Springs, September 1995.