Embed Size (px)
Citation preview

1FdttvtbviatOTwffeisbdweffrtp
ia
1042 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
Optimum synthetic-aperture imaging of extendedastronomical objects
Casper van der Avoort, Silvania F. Pereira, and Joseph J. M. Braat
Optics Research Group, Delft University of Technology, Lorentzweg 1, NL-2628 CJ, Delft, The Netherlands
Jan-Willem den Herder
SRON, Netherlands Institute for Space Research, Sorbonnelaan 2, NL-3584 CA, Utrecht, The Netherlands
Received April 12, 2006; revised August 22, 2006; accepted October 6, 2006;posted October 31, 2006 (Doc. ID 69867); published March 14, 2007
In optical aperture-synthesis imaging of stellar objects, different beam combination strategies are used andproposed. Coaxial Michelson interferometers are very common and a homothetic multiaxial interferometer isrecently realized in the Large Binocular Telescope. Laboratory experiments have demonstrated the workingprinciples of two new approaches: densified pupil imaging and wide field-of-view (FOV) coaxial imaging usinga staircase-shaped mirror. We develop a common mathematical formulation for direct comparison of the reso-lution and noise sensitivity of these four telescope configurations for combining beams from multiple aperturesfor interferometric synthetic aperture, wide-FOV imaging. Singular value decomposition techniques are usedto compare the techniques and observe their distinct signal-to-noise ratio behaviors. We conclude that for acertain chosen stellar object, clear differences in performance of the imagers are identifiable. © 2007 OpticalSociety of America
OCIS codes: 110.1650, 110.4980, 110.5100, 110.6770, 350.1260, 350.6090.
mioef
dAlwletotmpftocW
2IOipafq
. INTRODUCTIONor a long time, aperture synthesis imaging in the opticalomain was impractical because of the extremely tightolerances in bringing the light from the various subaper-ures to a coherent focus. But important technological ad-ances have been made in the past decade, such as adap-ive optics and active mechanical control, and optical longaseline stellar interferometry is an astronomical obser-ation technique that has come of age.1,2 Only a few of thenterferometric telescope arrays currently in operationre designed to perform imaging tasks, as are the cases ofhe Large Binocular Telescope (LBT) and the Cambridgeptical Aperture Synthesis Telescope (COAST) array.3,4
he arrays forming the synthetic aperture are imagers asell as arrays measuring stellar properties, and they per-
orm intensity measurements that, due to the coherenceunction of the stellar object projected onto the array ap-rture, will change with the configuration of the array,.e., the separation and locations of the individual tele-copes. For imaging interferometers that combine theeams from telescopes coaxially, measuring the complexegree of coherence allows aperture synthesis imaging asith radio telescope arrays. For multiple aperture imag-rs with focal plane combination, such as in developmentor Earth observation but also in astronomy—as studiedor the Very Large Telescope Interferometer (VLTI) andealized in the LBT—the postdetection image reconstruc-ion is rather a joint deconvolution operation than a post-rocessing of recorded complex degrees of coherence.In this paper, we describe an approach to compare the
maging performance of both of these types of imagers forwide-field stellar observation. Moreover, two alternative
1084-7529/07/041042-11/$15.00 © 2
ethods are included in the comparison: densified pupilmaging5 and coaxial staircase imaging.6 The treatmentf partial coherence as well as deconvolution are both cov-red, unifying the analysis for all types of imaging inter-erometers.
The examples given in this paper are all one-imensional and treat only two-element interferometers.ll simulated observations are polychromatic, with wave-
engths � ranging from 6 to 10 �m. Light of a finite band-idth results in a certain coherence length; two beams of
ight with a path length difference larger than this coher-nce length will not show interference. It should be no-iced that partial coherence refers to the fact that lightriginating from a range of directions is considered, inhis case provided by an extended stellar source. Evenonochromatically, the observation of such a source is
artially coherent with a degree of coherence that is aunction of, among other things, the separation of theelescopes. The work presented in this paper was carriedut in the framework of the design of an imaging beamombiner for the European Space Agency’s (ESA’s) DAR-IN mission.7
. DISCRETIZATION OF THENTERFEROMETRIC IMAGING PROCESSptical interferometric imaging of stellar objects consists
n reproducing a luminous intensity function as it ap-ears on the sky from recorded intensity information. Thengular spatial frequencies in this luminous intensityunction are much higher than the maximum spatial fre-uency that any of the subapertures in the array can
007 Optical Society of America

tttnaic
ioostEdsMspttV(dftaho
ficpWrtfbpccpto
cfst
pamWts
ABrssartoceaDrbctfc
A
Tttoosfa
Fice
van der Avoort et al. Vol. 24, No. 4 /April 2007 /J. Opt. Soc. Am. A 1043
ransfer. Aperture synthesis as known from radioas-ronomy relies on numerical correlation of recorded elec-rical fields at each telescope. Optically, these fields can-ot be recorded; only the intensity is available. Opticalperture synthesis hence requires correlation of the fieldsn situ resulting in intensity patterns that can be re-orded.
The analytical description of such an intensity patterns straightforward when monochromatic plane wavesriginating from a point source arrive at the array. Basedn array configuration, an intensity pattern with eitherpatial fringes or a varying intensity as a function of op-ical path-length difference or delay can be predicted.ven when many wavelengths are taken into account, theescription of the intensity output is insufficient to de-cribe the correct intensity modulation of the output.ichelson (MI) demonstrated that when a star is the
ource of light, the modulation of the fringed intensityattern depends on the separation of the subapertures ofhe array.8,9 For different stars, a different relation be-ween separation and modulation is found. The Zernike–an Cittert theorem10 shows that the complex modulation
amplitude and phase), which is referred to as complexegree of coherence, can be predicted by Fourier trans-orming the luminous intensity distribution function ofhe source. With the theory of partial coherence, see Bornnd Wolf,10 the propagation of the complex degree of co-erence through an optical system can be performed, inrder to predict the intensity output.
For polychromatic wide field observations (where wideeld is defined as an observation wider than a single in-oherent diffraction envelope) the approach based onropagation of partial coherence is possible but elaborate.hen the optical recombination scheme of a telescope ar-
ay incorporates discontinuous reflecting surfaces orransportation (explanation will follow) of partial wave-ronts, an analytical description of the intensity outputased on diffractive calculations and the propagation ofartial coherence is very inefficient. Besides that, physi-al insight into the imaging process is lost. This insightlarifies and facilitates the inversion of recorded intensityatterns to reconstruct the luminous intensity function onhe sky—the main goal of the description of the intensityutput.
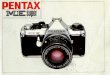
The method presented in this paper describes analyti-ally defined point-source intensity outputs of four inter-erometers that are sketched in Fig. 1. Since a stellarource is a collection of independent point sources, the in-ensity outputs can be summed, resulting in intensity
ig. 1. (Color online) Sketches of four stellar interferometers as dnterferometry were performed with a configuration similar to soaxial MI–Morley interferometer. Configuration D is commonly axperimented with a masked aperture; no beam relay optics wer
rofiles that have a modulation amplitude and phase inccordance with the theory of partial coherence. The sum-ation is performed by a matrix-vector multiplication.e will try to invert this equation at best, with the result
hat measured intensity profiles can be used to recon-truct a stellar luminous intensity function.
. Response Functionsefore constructing a transfer matrix for an interferomet-ic array that can be used to calculate the detector re-ponse of an extended stellar object, the intensity point-ource response is derived for that array. A point source atn angle of incidence �in, see Fig. 2, causes an intensityesponse on the detector in ��out,d� space, where �out ishe coordinate on the linear detector and d is the delay inne interferometer arm. Note that the delay d is not indi-ated in Fig. 2, nor the beam relay from entrance pupils toxit pupils. These intensity responses are available asnalytical expressions, including the telescope diameter, the wavelength �, the telescope baseline Bin
�k� for a se-ies of k=1,2, . . . ,K observations, the recombinationaseline Bout before the focusing optics, and the beamompression or angular magnification M. For the four in-erferometers treated here, these expressions are foundrom the general interferometer diffraction integral, ac-ording to
�k���out,d�
=�−�1/2�Bout−�1/2�D/M
−�1/2�Bout+�1/2�D/M
ei�2�x�out/��M
�exp�i�2��− xM�in + 12 �Bin
�k�/M − Bout�M�in�/���dx
+ ei�2�d/����1/2�Bout−�1/2�D/M
�1/2�Bout+�1/2�D/M
ei�2�x�out/��M
�exp�i�2��− xM�in − 12 �Bin
�k�/M − Bout�M�in�/���dx.
�1�
he first exponential factor in the integrals constituteshe pupil-to-image relationship known from Fourier op-ics. The second exponential comprises the phases of sec-ndary point sources in the exit apertures; the amplitudesf the secondary sources are scaled by a factor of M. Forymmetry and ease of calculation, the term is primarily aunction of �inx (the dashed wavefront in Fig. 2), to whichphase offset is added (the length of black arrows in Fig.
ed in the literature. Note that Michelson’s experiments on stellar. The label MI as used here and in the literature refers to the
ed as a Fizeau interferometer, but it should be noted that Fizeaued.
escribketch Cddresse need

2o
tts
a(
sf[e
ais
Ods�
mtitffmf
wcflpotdit
sz
IcnoiinffBctfwmsF�pm
FuabfpaatdBtGlspap
1044 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
). Carrying out the integrations and using the definitionf the sinc function,
sinc�x� = �1 for x = 0
sin�x�
x, otherwise
, �2�
he integral in Eq. (1) results in A�k���out,d� expressionshat can be simplified and squared to arrive at an inten-ity response function for each specific interferometer.
A homothetic (HM) beam combiner has Bout=Bin�k� /M
nd produces a field-invariant point-spread functionPSF), given as
Ik��out� = 4D2 sinc2D�
M���out − M�in�
�cos2Bin�k��
M���out − M�in� , �3�
ince the sinc envelope has the same origin as the cosine-ringe function. Therefore, a polychromatic responsesums of Eq. (3) for several wavelengths �] will show annvelope with a few fringes, where the central fringe will
ig. 2. (Color online) This illustration indicates the coordinatessed in the derivation of the point-source response functions forll types of beam combination (any Bout�0), when a generaleam compression by a factor M is applied in each arm. The dif-raction integral is constructed symmetrically, leading to a com-act expression. The phase differences at the collection plane x�re indicated with black arrows at the locations numbered 1, 2,nd 3. After beam compression, the phase slope in an aperture inhe plane x is proportional to −xM�in. The arrow at location 2 in-icates that for proper exit pupil placement at a separation
in�k� /M, the light paths of a masked aperture are followed, since
he wavefronts in the apertures are part of a single wavefront.enerally, see indicator 3, the aperture separation after beam re-
ay is Bout, which is zero for coaxial beam combination. As a re-ult, the wavefronts in the exit apertures, see indicator 3, arearallel to the dotted line −xM�in but have an offset. As a result,
diffraction integral can be constructed, in which thehases proportional to �−xM� ± 1 �B�k� /M−B �M� � occur.
in 2 in out inlways be located centrally in the envelope. This propertys lost for the densified beam combiner, where the re-ponse is
Ik��out,d� = 4D2 sinc2D�
M���out − M�in�
�cos2�
��d + Bout�out − Bin
�k��in� . �4�
nly by making use of the internal delay d, the externalelay Bin
�k��in can be compensated. However, this compen-ation does not have to be perfect: for increasing values ofin, the fringes drift off-center but are still visible. Theagnification M and the ratio Bout/Bin
�k�, or the densifica-ion factor, define how fast the central fringe drifts off,.e., at what value of �in a jump in delay d has to be madeo place the fringes in the envelope again, as the sincunction has an off-axis origin at M�in while the cosineunction originates at Bin
�k��in/Bout. As a result, for everyeasurement at Bin
�k�, a number of observations with dif-erent d are to be made.
This is what interferometric imaging comes down to:hen fringes can be measured, high-resolution imaging
an be performed. The fringes have to cause intensityuctuation in either the �out direction across the detectorlane or in the d direction or in both directions; detectionf these intensities should take place at a number of loca-ions in ��out,d� space. Since pixellation is as important aselay positions, considering a general interferometer, thentensity information is considered to be spread over de-ection bins.
The coaxial interferometers MI and staircase are de-cribed likewise. Since the recombination baseline Bout isero, Eq. (4) reduces to
Ik��out,d� = 4D2 sinc2D�
M���out − M�in�
�cos2�
��d − Bin
�k��in� . �5�
t is important to notice that the sinc function is still in-luded in the response function. Although the fringes areo longer encoded spatially, an observation of a wide-fieldr extended source will need discrimination, on thencoherent- or low-spatial-frequency scale, of the recordednformation with respect to the direction �in. The requiredumber of pixels in the �out direction is much lower thanor the multiaxial interferometers. The coaxial responseunction in Eq. (5) shows a fringe function with an origin
in�k��in, meaning that for a polychromatic observation, the
entral fringe has moved far away from zero. Consideringhe general case of a large bandwidth and hence a fewringes present, this means that for an observation of aide field of view (FOV), the detector has to be read out atany settings of d, ranging from Bin
�K��in�min� to Bin
�K��in�max�, in
teps of �c /4. This large scanning range—or the narrowOV when only a short classical scanning range of −�cd��c is considered—inspired the invention of external
ath-length compensation by means of a staircase-shapedirror.6 The response function in this case transforms to

wtt
wg
TaBeF
fsgwewsit
BThos
ita
ftipi
t
smetebwL�
aAuaAmd�Acfirstptte
CTstr
van der Avoort et al. Vol. 24, No. 4 /April 2007 /J. Opt. Soc. Am. A 1045
Ik��out,d� = 4D2 sinc2D�
M���out − M�in�
�cos2�
��d − Bin
�k��in + h��in�� , �6�
ith h��in� as the staircase function, see Fig. 3. For a cer-ain step height h0 and step width �s, the staircase func-ion is given by
h��in� = �n=−�
+�
nh0 rect�in − n�s
�s
= �n=−�
+�
nh0H� �in − �n − 12��s
�s
− H� �in − �n + 12��s
�s , �7�
ith n�Z. Here, the Heaviside step function H�x� is used,iven as
H�x� = �0, x � 012 , x = 0
1, x 0
. �8�
he step width �s and step height h have to correspondnd need to be altered when changing the baseline length
in�k� according to h0=Bin
�k��s or �s=h0 /Bin�k�, to equalize the
xternal optical path-length difference over the completeOV.Now that we have specified the point-source response
or four types of interferometers, the actual imaging of atellar source can be considered. A stellar source is re-arded to be a collection of incoherent point sources ofhich the intensity responses can be summed. Anotherxample of treating partially coherent imaging in thisay can be found in a paper by Young and Hale.11 The
um of intensity responses can be performed after collect-ng all possible point-source responses in a transfer ma-rix.
. Interferometric Transfer Matrixo construct a transfer matrix, an observational layoutas to be defined, specifying either the desired resolutionf the obtained image or the constraints on the detectionide, when, for example, the scanning range in d is lim-
Fig. 3. Staircase function h��in�, as described in the text.
ted or the detector pixels are limited in size. In all cases,he source grid and detection grid have to be discretizedccording to
�in = ��in�1�,�in
�2�, . . . ,�in�n�, . . . ,�in
�N��,
d = �d1,d2, . . . ,dp, . . . ,dP�,
�out = ��out�1� ,�out
�2� , . . . ,�out�j� , . . . ,�out
�J� � �9�
or every baseline length Bin�k�, with k=1,2, . . . ,K. Then,
he transfer of a stellar source, expressed as a luminousntensity function L��in�, is related to a set of K intensityatterns, stored per pixel as Ijk�d�. If the forward problems denoted with operator g as
Ijk�dp� = g�L��in�,Bin�k�,�out
�j� �, �10�
hen the inverse problem is found by g−1 in
L̂��in� = g−1�Ijk�dp��, �11�
o that the luminous intensity function L̂��in� can be esti-ated from the measured series Ijk�dp� given the param-
ters Bin�k� and �out
�j� , the lengths of the baselines at whichhe data were taken, and the central locations of the pix-ls. Instead of using operator g, the forward problem cane denoted as a matrix-vector multiplication Ax=b,here the discrete vector x is a n�1 source function��in�. The measurement is stored in vector b, of size
JPK��1 and is constructed as
b = �Ij1�d�
Ij2�d�
. . .
Ijk�d�� , �12�
nd the Ijk�d� are column vectors of length jp. The matrixis sized �JPK��N and is actually a collection of b col-
mn vectors, giving the response when source vectors xre taken that are zero except for one element per vector.s such, matrix A is the transfer matrix of the interfero-etric imaging system, relating a collection of indepen-
ent point sources L��in� to a summed intensity pattern in�out,d� space, for a number of baselines. The columns of
resemble their neighboring columns, since, e.g., in theoaxial case for a small grid spacing �in= ��in
�2�−�in�1��, the
ringe shift or external delay Bin�k��in can be small, result-
ng in nearly equal columns. Physically, this means that aecorded fringe function is hard to relate to a specificource direction. As a result, matrix A has a large condi-ion number, and the problem is ill-conditioned or ill-osed. Nonetheless, matrices can be constructed for all in-erferometers, and they contain all necessary informationo compare the imaging performance of the interferom-ters.
. Detection Parametershe values J, P, K, and N are chosen as follows. The de-ired FOV and synthetic resolution can freely be chosen;he analysis of the transfer matrix will show if the desiredesolution is achieved in the full FOV, or whether the cho-

snbtwc��btttpnas
dwfr��t
tdqodsHetst
sdg
orol−sg
Tb�fm
nFatsfpi
Tntpddc(
fca
P
ARMF
P
DPNSDNB
f
1046 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
en spacing is too small. The grid of the �in values doesot have to be equidistant, but in these examples it wille. The number of baselines also relates to the resolution:he image information of ultimate resolution is addedhen fringes are measured at the maximum value of the
hosen baseline lengths; the angular resolution will be�c /Bin,max, much higher than the incoherent resolution
��c /D� of a single aperture. After fixing the maximumaseline length in accordance with the desired resolution,he number of baselines is simply Bin,max/D, since to ob-ain an image containing all spatial frequencies, the syn-hetic aperture will have to be filled in completely. Forolychromatic observations with monochromatic (lumi-ous intensity) image reconstructions, larger steps in Bin
�k�
re allowed, since the wavelength range causes overlap ofpatial frequencies when sampling at, e.g., Bin
�k� and Bin�k+1�.
The number of delay steps p is such that fringes in direction (for the coaxial methods) are at least sampledith �c /4 intervals, and that the d positions of the central
ringes of point sources at the outer edges of the FOV areeached with a delay scan, causing a scanning range of
in�min�Bin,max�d��in
maxBin,max for the MI case and −hK�dhK for the case of staircase compensation, where hK is
he maximum stair height.The angular pixel dimensions in the focal plane are for
he coaxial imagers half the angular size of the incoherentiffraction spot �� 1
2�c /D� and for the multiaxial imagers auarter of the angular width of a fringe �� 1
4�c /Boutmax�, in
rder to sample each fringe again with four samples. Forensified pupil imaging, Bout is a fixed value causing theame number of samples per fringe for each value Bin
�k�; forM imaging, the number of pixels on the detector array is
ssentially chosen such that the ultimate spatial resolu-ion on the sky can be sampled. All snapshots taken athorter baselines are oversampled. The characteristics ofhe four interferometers are listed in Table 1. For the
Table 1. Characterization of the Beam CombinerOptics in the Interferometers under
Considerationa
roperty HM Densified MI Staircase
xiality Multi Multi Coaxial Coaxialecombination Bout=Bin
�k� /M Bout=2D Bout=0 Bout=0agnification M=1 M=1 M=1 M=1ringe encoding �out �out,d d d
aThe magnification was chosen to be M =1 for simplicity.
Table 2. Discretization of the „�out,
arameter HM
etector size FOVixel size p��Bout,max� /4umber of pixels 235canning range —elay step size —umber of steps 1ins total 235
aThe FOV is related to the size of the incoherent diffraction limit for an apertureocus p is derived from the general intensity response function and equals p �B �
� � out c ouimulation runs with the four methods, the correspondingiscretizations of the ��out,d�-observation spaces areiven in Table 2.
The telescope diameter is in all cases D=3.5 m, and thebservation is performed for a large set of wavelengths �anging from 6 to 10 �m. The polychromatic response isbtained by summing the intensity signals for each wave-ength. This leads to a coherence length lcoh=�c��c / ��max
�min�� of 16 �m. The baseline lengths Bin�k� at which the
napshots are taken, are equal for all interferometers andiven as
Bin�k� = �2D, k = 1
4�k − 1�D, k = 2,3, . . . ,9. �13�
he baseline length differences of 4D might seem large,ut with an observational bandwidth for which 6 �m�c�10 �m, this set of baselines leads to a spatial-
requency coverage with no gaps up to the desired ulti-ate spatial frequency.Table 2 provides a list of the detector discretizations,
eeded for the four different imagers, in order to cover theOV and reach the same spatial-angular-frequency cover-ge. For the methods other than densified, the discretiza-ion is straightforward. The necessary range of delayteps for the densified case to have coherent informationrom all regions of the sky is derived from the modulationart of the intensity point-source response for a generalnterferometer, given as
cos�Bout
���out − Bin
Bout�in +
d
Bout� = 1 for �in = �in
�max�.
�14�
he expression of Eq. (14) states that a bright fringe isecessary at the boundary of the FOV. Since the observa-ion is polychromatic and only a few fringes will beresent, this requirement is reduced to finding the delay, for which the central fringe appears in the center of theiffraction envelope. For the edge of the FOV at magnifi-ation M=1, this center is located at �out=�in
�max�. Equation14) now reduces to
d = Bout�in�1 −Bin
Bout� , �15�
rom which discrete settings of d are derived; three in thisase. These three settings make that for the observationst Bin,max fringed PSFs can be observed in the right-hand
tection Space for the Simulationsa
sified MI Staircase
OV FOV FOV
out� /4 p��D� /2 p��D� /21 6 6
+ 32 lcoh 2Bin,max�in
�max� 2lcoh
coh �c /4 �c /43 234 253 1404 150
eter D and equals FOV=3PSF, where PSF=1.22�c /D. The angular fringe period in.
d… De
Den
Fp��B
3−3
2 lcoh¯
l
9
of diam=� /B
t
sf
3AT
isovaptethmmsl
LPTmncCi
BAc(tai
IUdVmr
Tli
e
Tt
b(imdtf
l
hcg
FPiltu+=vLwc
van der Avoort et al. Vol. 24, No. 4 /April 2007 /J. Opt. Soc. Am. A 1047
ide, the central, and the lefthand side regions of the skyor the respective setting of d.
. SINGULAR VALUE DECOMPOSITION. Ill-Posed Problemshe generalized and discrete imaging equation
b = A · x, �16�
n itself is an illustrative construction of measurementignals, giving insight into the partially coherent naturef this type of observation. Intensity patterns from indi-idually incoherent but hardly separated point sourcesre summed, resulting in an intensity response that de-ends on the type of interferometer and particular set-ings such as the telescope separation Bin
�k�. The imagingquation however, was actually constructed to obtain es-imates of L̂��in� expressed as x̂ out of measured andence noisy b. Without wanting to deal with the measure-ent procedure, we will show that, first, inversion of theatrix-vector approach to interferometric imaging is pos-
ible and, second, that the solution of this inversion prob-em gives additional insight into the imaging problem.
A naive reconstruction L̂��in� of an original source��in� with average amplitude 1 results from the Moore–enrose inverse x̂= �ATA�−1AT ·b with added noise to b.he result is a seemingly random estimate of very highagnitude (104 instead of the expected 1), with a largeumber of sign changes, see Fig. 4. This behavior is typi-al for inversion of ill-posed or ill-conditioned problems.learly, a different approach is necessary to derive mean-
ngful solutions to the inverse imaging equation.
. Analysisparticularly useful numerical tool for the analysis of ill-
onditioned problems is the singular value decompositionSVD) since it reveals all the difficulties associated withhe ill-conditioning of matrix A.12,13 Considering the rect-ngular transfer matrix A�Rm�n, the SVD of this matrixs written as
A = U · S · VT = �i
ui�iviT. �17�
n the case of an overdetermined system �mn�, matrixis of dimensions m�n, and V is of n�n. For an under-
etermined system �m�n�, U is of dimensions m�m, andis of n�m. In both cases, U and V are unitary
atrices—UT ·U=Im and VT ·V=In—with their columnsepresenting the left and right singular vectors ui and vi:
U = �u1u2 ¯ umin�m,n��, V = �v1v2 ¯ vmin�m,n��. �18�
he nonnegative and real singular values (SVs) �i are col-ected on the diagonal of matrix S=diag��1�2¯�min�m,n��n descending order such that �1��2� ¯ ��min�m,n��0.
The condition number of A equals the ratio of the larg-st and smallest SV:
cond�A� = �1/�min�m,n�. �19�
his ratio is a measure for the sensitivity of the solutiono perturbation errors in matrix A or the right-hand side
. It has to be remarked that the SVD presented in Eq.17) is a so-called economy-sized type of decomposition,.e., the SVs and vectors associated with the null space of
atrix A are intentionally left out of consideration to re-uce the computational cost of this calculation. In connec-ion with discrete ill-posed problems, three characteristiceatures of the SVD of A are often found13–16:
1. The SVs �i decay gradually to zero with no particu-ar gap in the spectrum.
2. The condition number of A is large.3. The left and right singular vectors ui and vi tend to
ave more sign changes in their elements as index i in-reases. In other words, for the lower values of �i, the sin-ular vectors become more oscillatory.
ig. 4. (Color online) Naïve inversion of interferometric data.anel (a) shows a reorganized measurement vector b̄, resembling
ntensity interferograms recorded at four different baselineengths, obtained as b̄=A ·x, where x is a positive source func-ion L��in� with maximum amplitude 1 in arbitrary units (arb.nits). The results are then photon quantized, resulting in b= b̄eb. Panel (b) then shows the naive reconstruction x̂�ATA�−1AT ·b, where the pseudoinverse or Moore–Penrose in-erse is used since A is not square. The result is an estimate
ˆ ��in� of very high magnitude (104 instead of 1 for the source),ith a large number of sign changes. Note the scale of the verti-
al axis causing the source to appear as a straight line at zero.

tbcaorocicdfiit
•nta•�wBa•mcsds
CSt
pfcct
Ts
lilwpppp
sosofci
vwtavcc
sfi
weslSdsdl
Fm�
Fivow
1048 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
These characteristics are confirmed by the decomposi-ion of the imaging transfer matrix, e.g., the multipleaseline HM interferometer transfer matrix. Figure 5learly illustrates the gradual decay of the SVs �i (item 1)nd the large condition number (item 2), spanning manyrders of magnitude. In the figure, two lines separate theange of indices i into three regimes. The regimes and thescillatory behavior (item 3) are illustrated in Fig. 6. It isonfirmed that the left- and right-hand singular vectorsndeed contain more oscillations as the index of the SV in-reases. Further observation of these vectors leads to aescription of three regimes, physically relating to theact that the vectors result from an interferometric imag-ng matrix. The modes and magnitudes of the correspond-ng SVs can be separated into three regimes, based onheir index i:
Incoherent regime: For indices 1� i�nPSFs, wherePSFs is the number of incoherent PSFs fitting in the FOV,he modes relate to the low-resolution or incoherent im-ge of the sky.
Interferometric regime: The modes for indices nPSFsi� iB, where the major spatial frequency of the modeith index iB relates to the maximum baseline lengthin,max, are the modes related to the interferometric char-cter of the array.
Unsampled regime: The region of indices i iB containsodes of very high spatial frequency, which do not physi-
ally relate to the source or the measurement, since thesepatial frequencies are not sampled. This occurs when theiscretization step size ��in
�2�−�in�1�� is smaller than the
mallest spatial period that is sampled, �min/Bin,max.
learly, the latter set of modes (related to the smallestVs �i) has to be banned in all cases from the construc-ion of a solution to the inverse problem.
The SVD also gives important insight into another as-ect of ill-conditioned problems, namely, the smoothing ef-ect. This is typically associated with integral kernels en-ountered in many physical problems.13,15 For example,onsider the mathematical mapping b=A ·x of an arbi-rary vector x. Application of the SVD yields
b = U · S · VT · x, or b = �i�i�vi
T · x�ui. �20�
he product viT ·x can be interpreted as a measure for the
patial matching (or participation factor) between singu-
ig. 5. Singular value spectrum of a 1592�151 image transferatrix A, as in Eq. (16). The condition number is cond�A�=2.401016.
ar vector vi and vector x. With this knowledge and recall-ng that the singular vectors ui and vi become more oscil-atory as �i decreases, it is obvious that the multiplicationith �i leads to more damping of the high-frequency com-onents of x and less damping of the low-frequency com-onents in the map A ·x. As a consequence, in forwardroblems, the solution b is generally smoother than therescribed vector x.In contrast, the inverse problem (containing 1/�i) will
how the opposite effect, amplifying the high-frequencyscillations in the right-hand side b. Owing to themoothing characteristics of the forward problem, noiseften has a relatively strong contribution to the high-requency oscillations in b. Therefore, especially the noisyomponents are subjected to a large amplification in thenverse process.
Concluding, the forward operation of mapping inputector x onto output vector b has a smoothing effect on b,hereas the opposite operation tends to amplify oscilla-
ions in vector b. Hence, if a solution of x is required withlimited L2 norm, then not all distributions b form a
alid right-hand side. In fact, vector b must be suffi-iently smooth to survive the inversion back to a physi-ally meaningful x.
Naively solving the inverse problem results in con-tructing the least-squares solution. With the SVD as de-ned in Eq. (17), this solution can be written as
xLS = �i
uiT · b
�ivi, �21�
here the factors uiT ·b /�i represent the contribution of
ach singular vector vi (source mode) in the least-squaresolution xLS. If now the Fourier components �ui
T ·b� areeveled off at a noise floor, they cannot decay as fast as theVs �i. The direct consequence is that the solution xLS isominated by terms in the sum corresponding to themallest SVs �i; thus, the shape of the solution is mainlyetermined by the source mode shapes vi associated witharge i. Since these mode shapes have a highly oscillatory
ig. 6. Singular vectors show more oscillations for higher index. Vectors ui can be interpreted as measurement modes whereasectors vi represent source modes. The vectors ui are plotted withffsets in the vertical direction, and only for three baselines Bin
�k�,here k=1,3,5.

nAstcoi
4Osc
TsE(tmomm
aptntasact
wact
=t
Ttptcsvt
raocpos
(busrFt(mt
5Wot
FifdT
Fmsdp
van der Avoort et al. Vol. 24, No. 4 /April 2007 /J. Opt. Soc. Am. A 1049
ature, the solution appears to be completely random.part from the many oscillations, the magnitude of theolution xLS usually ends up being extremely large owingo the division by the very small SVs. This knowledgelarifies that the purpose of regularization is to dampenr filter out the contributions to the solution correspond-ng to the small SVs.
. TIKHONOV REGULARIZATIONnce it is known that the ill-behavior is related to the
mallest SVs �i, the most obvious cure is to simply trun-ate the number of terms in the solution xk:
xk = �i=1
k uiT · b
�ivi, with k � min�m,n�. �22�
his truncation effectively eliminates the influence of allingular vectors vi associated with SVs smaller than �k.ssentially, the truncated singular value decomposition
TSVD) approach replaces the ill-conditioned transfer ma-rix A with a new well-conditioned, but rank deficient,atrix Ak (as described by Hansen15). The participation
f modes vi in the solution is either uiTb /�i, or zero. A
ethod to limit the participation of the higher-orderodes in a more subtle way is Tikhonov regularization.Tikhonov regularization12 is probably the most popular
nd well-developed method to handle discrete ill-posedroblems. It differs from the TSVD approach in the facthat the initial ill-conditioned problem is solved simulta-eously with a side constraint imposed on certain proper-ies of the sought solution.13 These constraints are usu-lly associated with smoothness properties of the solutionince ignoring contributions related to small SVs leads tosmoother solution with a reasonable L2 norm. In dis-
rete problems, the problem of Tikhonov regularizationakes the form:
minx
��A · x − b�2 + 2�L · x�2�, �23�
here L represents the so-called regularization matrixnd is the regularization parameter. For a discussion ofhoosing the smoothing operator L, the reader is referredo the work by Visser16 on acoustical transfer matrices.
ig. 7. L curve is a method to blindly find the optimum regular-zation parameter . The norms �A ·x −b� and �x � are plottedor a range of values. The corner is found as the minimum ra-ius of curvature in a spline fit through the calculated points.he standard two norms are taken.
The most simple form of Eq. (23) is obtained with LI. The Tikhonov regularized solution x can in combina-
ion with the SVD be written as
x = �i
uiT · b�i
�i2 + 2
vi. �24�
he regularization parameter is chosen to lie betweenhe largest and the smallest SVs. Like the TSVD ap-roach, the Tikhonov method acts as a low-pass filter inhe SV spectrum, be it that TSVD manifests an abruptutoff, whereas the filter spectrum in the Tikhonov casehows a gradual decline. Regularization of a linear in-erse problem now comes down to finding the regulariza-ion parameter , so that the norms
�A · x − b�, �x �, �25�
espectively, the data misfit norm and the solution norm,re small. Figure 7 plots these two norms against eachther, for a range of values of . The result is a plot thatlearly has an L shape, as is generally the case for ill-osed discrete inverse problems.15 In the corner, the sumf the two norms is smallest, meaning that the corre-ponding minimizes the expression in Eq. (23).
As is found, a solution can be calculated with Eq.24). The participation of the solution modes vi can nowe controlled. Figure 8 shows the participation strength
iT ·b�i / ��i
2+ 2� for three increasing values of , corre-ponding to an underregularized solution, an optimallyegularized solution, and an overregularized solution. Inig. 9, the corresponding regularized solutions are plot-
ed. These show an estimate with amplification of noiseunderregularization), an optimal estimate and an esti-ate, unable to recover sharp edges (oversmoothing due
o overregularization).
. DARWIN OPTIONS COMPAREDe have described the simulation of an interferometric
bservation, which consists in: generating response func-ions according to the chosen beam combiner and array
ig. 8. Plot of the mode participation, expressed as uiTb /�i, for a
ode with index i. The thin curve (no regularization, =0)hows that indeed the participation of noise-sensitive, higher in-ex modes is strong. The thick curves show the regularized modearticipation for = opt�
110 ,1 ,10�.

csaoibmiocattWosm
pFtt
wmTiomttltFgc
fgmwlt
ftS
•••
AccdActTsofpfiilpTtmtcvHtn
Fmwll
1050 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
onfigurations, summing these to a measured intensityignal, perturbing that signal to represent low-light levelsnd imperfect detection and, finally, estimating an imageut of these signals. The sources of noise are not specifiedn this paper—the described regularization procedure cane assumed to be able to deal with any degradation of theeasurement signals b or perturbations in the matrix A
tself. Based on the generated estimations, a comparisonf the imaging performance of the interferometers underonsideration, based on different recombination schemesnd detectors, can be made. In this section, we comparehe imaging performance of the interferometers solely onhe basis of the response functions and transfer matrices.ith the transfer matrices available, a plot can be made
f the SVs related to the four interferometers and the cho-en array parameters, such as delay settings and pixel di-ensions.The general regularization process for a discrete ill-
osed inverse problem has been described in Section 4.or the case of interferometry, out of a measurement vec-or b, an estimate of the source L̂��in�, represented by vec-or x , is given according to
x = �i=1
n uiTb�i
�i2 + 2
vi, �26�
here is the regularization parameter, ui and vi are theeasurement and the solution modes, and �i are the SVs.his decomposition of the solution of the inverse problem
s a direct result of the SVD of the transfer matrix, basedn point-source responses. Based on the fact that theode vectors ui and vi are unitary, Eq. (26) makes clear
hat the constant and the values of �i, balance the par-icipation of solution modes vi in the estimate x . The so-ution modes are ordered by the SVD with respect to spa-ial frequency content, from low to high, as depicted inigs. 10(a) and 10(b). From a signal theory point of view, aood imager would be susceptible to all spatial frequen-ies with nearly equal amplitude. Examples are the flat
ig. 9. (Color online) Reconstructions or estimates L̂��in� for thatically found using the L curve. In the figure, the size of the deell as the approximate size of the single-dish-diffraction envelop
ated here, is able to recover spatial details in L��in� that are muc�k�
ines Bin was taken.requency response of professional loudspeakers or theradually decreasing modulation transfer function of aicroscope in a partially coherent imaging mode. In otherords, it would be good if the SVs associated with the so-
ution modes show a slow decline and a small ratio be-ween the largest and the smallest participating SV.
The plot in Fig. 11 shows the normalized SVs for theour beam combiners. This SV plot can be separated intohree regimes, based on the index i, as defined inection 4:
incoherent regime: i=1¯4,interferometric regime: i=5¯110,unsampled regime: i=111¯231.
s stated, a good imager would demonstrate a slow de-line in the SVs and a small ratio of the largest (in allases �1 is normalized to 1) and the smallest SV. Thisrop in SV amplitude can be split in the vertical measuresand B, as indicated in Fig. 11. We can now analyze the
urves as follows. In terms of a flat frequency response,he classical HM and MI beam combiners perform well.he height difference between these two curves, AMI ver-us AHM, relates to the responsiveness of the very low-rder modes. Apparently, for the MI imager, the very low-requency nature of the source (imaged on the six largeixels) is relatively much stronger represented than thene structure of the source. As for the HM response, there
s a large drop over the first few values. This can be re-ated to the fact that the low-frequency response isresent in every measurement at baseline length Bin
�k�.he average levels of the second regimes are different for
he MI and HM lines. This is due to the nature of theeasurement signals. A typical MI signal shows an ex-
ended incoherent signal (related to low spatial frequen-ies) of length �dmax−dmin�� lcoh within which a relativelyery short fringe packet of length lcoh is present. In theM case—with field invariant point response functions—
he high-frequent information is present all over the sig-al, for ���in
�min�¯�in
�max�.
gularization parameters = opt�1
10 ,1 ,10�, where opt was auto-pixels in angular measure is indicated (short horizontal line), asg horizontal line). The coaxial MI interferometer that was simu-ller than the incoherent diffraction limit. A complete set of base-
ree retectore (lonh sma

qbcfrbsw1swfi
acm
qhtAtsf
6Tafpigsn
moTpcFtst
s
FHipcim
Ffmo
van der Avoort et al. Vol. 24, No. 4 /April 2007 /J. Opt. Soc. Am. A 1051
Compared with the relatively flat interferometric fre-uency response of the HM and MI beam combiners, theeam combiners staircase and densified show steeper de-lines, defined as B / �iB− iPSFs�, for the SVs in the inter-erometric regime. The curve for densified is not eveneaching the spatial frequencies related to the maximumaseline Bin,max. The SV plot actually shows how the den-ified FOV narrows down for higher spatial frequencies,hich is also visible in the reconstruction modes vi in Fig.0. Clearly, more steps d are necessary for the densifiedimulation to present a proper frequency transfer—whichas intentionally not done for illustrative purposes. Thegure hence shows that the design of the beam combiner
ig. 10. (a) Comparison of the first 20 solution modes vi for theM and the densified methods. Note how the FOV narrows down
n the densified case, as the spatial frequency increases. (b) Com-arison of the first 20 solution modes vi for the MI and the stair-ase methods. Generally, the modes are a sum of several harmon-cs. Note the occurrence of symmetrical and antisymmetrical
odes, e.g., in the staircase modes 5 and 6.
nd the intended set of observations of the stellar sourcean be checked for transferring properly all spatial infor-ation of the stellar source.The staircase transfer is slowly degrading up to the fre-
uency limit related to Bin,max. This means that theigher spatial frequencies are relatively more susceptibleo loss of signal strength induced by the staircase mirror.
possible source for this inefficiency is that the folding ofhe fringe signal destroys the unique relation betweenource L��in� and measurement Ijk�d�. Apparently, this ef-ect gets worse for increasing baseline lengths.
. CONCLUSIONShe interferometric imaging process can be expressed asmatrix-vector multiplication b=A ·x. By doing so, the
orward expression gives insight in the construction ofartially coherent detection signals since generally speak-ng, fringed intensity signals with slightly different ori-ins are summed. The inversion of this equation, neces-ary to perform imaging with measured fringe signals,eeds regularization.With the regularization tools in place, optimal esti-ates can automatically be obtained from photon-starved
r otherwise degraded interferometric measurements.he transfer of stellar information through any of the fourresented interferometers into interferometric signalsan be described and stored in a single transfer matrix A.or various sources L��in� and changing observationimes, each interferometer type-related A can produceimulated measurements, from which optimal reconstruc-ions L̂��in� can be produced.
The transfer matrices are constructed under the as-umption that the beam relay is perfectly known and no
ig. 11. (Color online) Normalized SVs �i /�1 for the four inter-erometry methods. A flat line up to the cutoff induced by theaximum baseline Bin,max ��i=100� indicates a proper transfer
f all spatial frequencies. See text for details.

pifacpctsim
ettemgsoidctsat
ATis
d
R
1
1
1
1
1
1
1
1052 J. Opt. Soc. Am. A/Vol. 24, No. 4 /April 2007 van der Avoort et al.
erturbations exist in the optics or the detector. Furthernvestigation is required to check the reconstruction per-ormance when the delay d and the baselines Bout and Binre known with finite accuracy. Insensitivity to inaccura-ies in the knowledge of these parameters may outweigherformance advantages of the configurations as they areurrently simulated. However, it should be mentionedhat noise in the transfer matrix is essentially treated theame as noise in the measurement vector; the presentednversion algorithm will still provide solutions that fit the
easurements best.Despite the different optical layouts of the interferom-
ters, the singular value analysis of each matrix A showshat the same features appear in the reconstructions andhat the interferometers, or chosen system parameters forqual interferometers, can be compared on their imagingerits. Preliminary analyses in the photon-starved re-
ime have shown that a homothetic imager, indeed re-embling a true imager the most, performs superior to thether three, with the staircase imager as runner-up. Annvestigation based solely on the signal-to-noise ratio inetection signals would neglect the existence of large in-oherent parts in each detected signal. Extensive simula-ions of these interferometers, with a selected stellarource as an object and using DARWIN-like telescope di-meters and separations, are projected for the near fu-ure.
CKNOWLEDGMENTShis work is part of the SRON activities in developing an
maging mode for the DARWIN nulling array and is a re-ult of the Ph.D. research performed by C. van der Avoort.
Corresponding author C. van der Avoort’s e-mail ad-ress is [email protected].
EFERENCES1. A. Quirrenbach, “Optical interferometry,” Annu. Rev.
Astron. Astrophys. 39, 353–401 (2001).2. S. K. Saha, “Modern optical astronomy: technology and
impact of interferometry,” Rev. Mod. Phys. 74, 551–600(2002).
3. P. M. Hinz, J. R. P. Angel, D. W. McCarthy, Jr., W. F.Hoffman, and C. Y. Peng, “The Large Binocular TelescopeInterferometer,” Proc. SPIE 4838, 108–112 (2003).
4. J. E. Baldwin and C. A. Haniff, “The application ofinterferometry to optical astronomical imaging,” Philos.Trans. R. Soc. London, Ser. A 360, 969–986 (2002).
5. A. Labeyrie, “Resolved imaging of extra-solar planets withfuture 10–100 km optical interferometric arrays,” Astron.Astrophys., Suppl. Ser. 118, 517–524 (1996).
6. I. Montilla, S. F. Pereira, and J. J. M. Braat, “Michelsonwide-field stellar interferometry: principles andexperimental verification,” Appl. Opt. 44, 328–336 (2005).
7. DARWIN The Infrared Space Interferometer: Redbook(ESA-SCI, 2000), Vol. 12.
8. A. A. Michelson, “On the application of interferencemethods to astronomical measurements,” London,Edinburgh Dublin Philos. Mag. J. Sci. 30, 1–21 (1890).
9. A. A. Michelson and F. G. Pease, “Measurement of thediameter of Alpha Orionis with the interferometer,”Astrophys. J. 53, 249 (1921).
0. M. A. Born and E. Wolf, Principles of Optics, 6th ed.(Pergamon, 1980), pp. 508–510.
1. M. Young and P. D. Hale, “Off-axis illumination and itsrelation to partial coherence,” Am. J. Phys. 63, 1136–1141(1995).
2. A. N. Tikhonov and V. Y. Goncharsky, Solutions of Ill-PosedProblems (Winston & Sons, 1977).
3. P. C. Hansen, “Regularization tools: a Matlab package foranalysis and solution of discrete ill-posed problems,”Numer. Algorithms 6, 1–35 (1994).
4. P. C. Hansen, “The discrete Picard condition for discreteill-posed problems,” BIT 30, 658–672 (1990).
5. P. C. Hansen, “Analysis of discrete ill-posed problems bymeans of the L-curve,” SIAM Rev. 34, 561–580 (1992).
6. R. Visser, “Regularization in nearfield acoustic sourceidentification,” in Proceedings of the Eighth InternationalCongress on Sound and Vibration (2001), pp. 1637–1644.