Embed Size (px)
Citation preview

Nonlinear Dyn (2019) 96:13–21https://doi.org/10.1007/s11071-019-04769-1
ORIGINAL PAPER
Optimizing optimization: accurate detection of hiddeninteractions in active body systems from noisy data
Chun-Wang Su · Zi-Gang Huang · Wen-Xu Wang ·Jue Wang · Xiao-Fan Wang · Ying-Cheng Lai
Received: 22 March 2018 / Accepted: 8 January 2019 / Published online: 23 February 2019© Springer Nature B.V. 2019
Abstract Given deficient and noisy movement datafrom a pedestrian crowd—a class of active body sys-tems, is it possible to uncover the hidden group inter-action patterns or connections? Yes, it is possible.Here, we develop a general framework based on anoptimal combination of the conventional compressivesensing (L1 minimization) and L2 optimization pro-cedure to achieve optimal detection of the contact
C.-W. SuInstitute of Computational Physics and Complex Systems,Lanzhou University, Lanzhou 730000, Gansu, China
C.-W. Su · Z.-G. Huang (B) · J. WangThe Key Laboratory of Biomedical InformationEngineering of Ministry of Education, The Key Laboratoryof Neuro-informatics & Rehabilitation Engineering ofMinistry of Civil Affairs, School of Life Science andTechnology, Xi’an Jiaotong University, 710049 Xi’an,Chinae-mail: [email protected]
W.-X. WangThe State Key Laboratory of Cognitive Neuroscience andLearning, School of Systems Science, Beijing NormalUniversity, Beijing 100875, China
X.-F. WangDepartment of Automation, Shanghai University, Shanghai200444, China
Y.-C. LaiSchool of Electrical, Computer and Energy Engineering,Arizona State University, Tempe, AZ 85287, USA
Y.-C. LaiDepartment of Physics, Arizona State University, Tempe,AZ 85287, USA
network embedded in pedestrian crowd under the datashortage conditions. Different from previous publica-tions, in our framework, the optimal weights of theL1 and L2 components in the combination can bedetermined specifically from the noisy data, which canobtain more accurate detection for the correspondingsystem. To detect hidden interaction patterns from spa-tiotemporal data has broader applications, and our opti-mized compressive sensing-based framework providesa practically viable solution. In addition, we providea relative entropy perspective to facilitate more gen-eral theoretical and technological extensions of theframework.
Keywords Active body system · Compressivesensing · L1-regularized least squares · Optimaldetection
1 Introduction
Movements of people or pedestrian crowd constitute acomplex spatiotemporal dynamical system, where theoutput data are time series of individuals’ instantaneouspositions and velocities. Such data sets have becomewidespread, but the available analysis tools have beenlimited. For example, a task of interest is to uncover anyhidden connection patterns or the interaction networksamong the individuals. The pedestrian interaction sys-tems represent a prototypical class of active body
123

14 C.-W. Su et al.
systems, in which the interactions among the individ-uals can be described by certain forms of social forces[1–4]. The resulting mutual interactions among theindividuals lead to continuous updates of the under-lying dynamical processes that can be measured andcharacterized by the velocities and positions of the indi-viduals. For example, for a group of friends or acquain-tances, the dynamical patterns of their movements canbe quite distinct from those with complete strangers.Often, individuals in a pedestrian crowd tend to self-organize into mesoscopic groups with certain interac-tion structure. To decipher the mesoscopic interactionsand then to map out the interaction network of thewhole system are essential to detecting and analyzingthe emergence of collective behaviors in the underlyingcomplex system.
The discovery of the special groups and the interac-tion rules has generated considerable interest in activebody systems [5–13], which are relevant to real-worldsystems such as fish shoals and insect swarms [14–17].Most previous works were on developing and analyz-ing various statistical techniques that often require alarge amount of data. In complex dynamical systems,recent years have witnessed a growing interest in solv-ing a variety of inverse problems based on data, wherethe central goal is to uncover the equations govern-ing the system dynamics and the connection topol-ogy among the components of the system [18–22].A general class of methods that have proven to beeffective in detecting system equations and networkstructures [22–35] is those based on sparse optimiza-tion paradigms such as compressive sensing [36–40]that typically require only limited amount of data. Inthis paper, to solve the problem of group and patterndetection in active body systems, we develop a gen-eral framework based on an optimal combination ofcompressive sensing (L1) and the L2 optimization pro-cedure. The optimal weights of the L1 and L2 compo-nents can be determined solely from data through thebasic optimization principle. Using pedestrian crowdsas a prototypical system and based solely on data, wedemonstrate that the framework can uncover the under-lying interaction network, group structures, and collec-tive behaviors efficiently and accurately, even when theavailable data are noisy and with small amount. Activebody systems are ubiquitous not only in social sys-tems, but also in physical, chemical, and biological sys-tems [3–6,41]. The completely data-driven frameworkdeveloped represents an effective approach to under-
standing, predicting, and even controlling active bodysystems.
2 Sparse signal detection based on compressivesensing
To solve the dynamical network reconstruction prob-lem associated with active body system using com-pressive sensing, it is necessary to formulate the prob-lem into the standard linear form: Y = M · a, whereY ∈ R
T×1 is a vector that can be obtained through datawith T being the number of discrete data points sam-pled from the original time series data, M ∈ R
T×N isa matrix that can also be calculated from the observeddata, a ∈ R
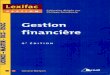
N×1 is the coefficient vector to be solved,whose N entries constitute a faithful representation(e.g., power series or Fourier expansion) of the orig-inal dynamical system that is assumed to be nonlinearand complex. The vector a is sparse when most of itselements are zero (Fig. 1a). In this case, application ofcompressive sensing [36–38] through minimizing thecorresponding L1 norm can lead to a unique solutionfor a. In particular, the solutions of Y = M · a form an(N−T )-dimensional hyperplane in the N -dimensionalspace. The norm contour surface of a is a polyhedronwith vertices located on the axes. Let the polyhedrongrow up from the origin, we get a with minimum L1
normat the first contact of the polyhedronwith the solu-tion plane: a ≈ arg min
Y=M·a ||a||1, as shown in Fig. 1b,
even if the matrix M has a low rank in the sense that ithas far more columns than rows.
The L1 normoptimizationmethod performswell fornoise-free systems, while for noisy data, a more effec-tive variant of compressive sensing named L1- regu-larized least squares (L1-RLS) [34,42] can be adopted.The L1-RLS takes into account a term of L2 norm toenhance the generalization ability of compressive sens-ing framework especially for systemswith noise,whichreads
a ≈ argmin {||Y − M · a||2 + λ||a||1}. (1)
Note that, under noise, we have Y = M · a + ξ , forwhich the solution a is located somewhere inside aquasi-3D block, just like the shaded block in Fig. 1c,rather than the 2D plane Y = M · a. The thickness ofthe 3D block is determined by the weight parameter λ
in Eq. (1), where a larger value of λmakes the 3D blockthicker. Theweight parameter λ plays an important role
123

Optimizing optimization: accurate detection of hidden interactions 15
Fig. 1 (Color online) Sparse solution estimation by L1 mini-mization and L1-RLS. a Sketch map for the underdeterminedlinear inverse problem with the expected solution a to be sparse.b For a noise-free system with Y = Ma, L1 minimization leadsto a sparse solution on the solution plane. c Extracting the sparsesolution by L1-RLS from the noisy systemdata thatY = Ma+ξ ,with ξ denoting the effect of noise. L1-RLS defaults to assumethe noise to be Gaussian
in adjusting the relative weights of the L1 and L2 termsin the objective function. If the value of λ is too large,e.g., as λ exceeds a threshold value λth, since the originhas already been contained in the 3D block, one wouldalways obtain a = 0 from Eq. (1). However, if λ istoo small, the 3D block would be too thin, which leadsto larger errors. The L1-RLS optimization approachesthe least squares procedure for further decreases of λ,say λ → 0. Thus, a suitable weight parameter λ in theL1-RLS is quite necessary.
3 L1-RLS reconstruction for relationship networkin active body system
Casting the reconstruction problem for an active bodysystem into the standard form for compressive sens-ing requires some minimal rules about the underly-ing dynamics. As the system is intrinsically extremelycomplex, we resort to a physically intuitive approach.First, the interactions among the acquaintances are dif-ferent from those among strangers. The systemcan thenbe regarded as a friendship network, where each linkconnects a pair of friends, and the number of links thatagent i has is the degree ki . Next, consider a pair of
friends (nodes): i and j . If they are apart, they tend tobe attracted toward each other. If they are too close, theytend to repel each other to avoid invasion of personalspace. The consideration suggests that the interactionbetween a pair of friends be modeled through the fol-lowing form of spring type of “social force”:
F f (i, j) = κ(1 − r0||r ji || )
r j i||r ji || , (2)
which is a function of the relative position betweennodes i and j , i.e., r j i = r j − r i in the planer i = (xi , yi ). The parameters κ and r0 are the elas-tic coefficient and the “comfortable” distance betweentwo friends, respectively. Finally, for a pair of strangers,the interaction between them can be described by theempirical pedestrian interaction model [4] extractedfrom real data:
Fs(i, j) = −[ke−τ/τ0
|vi j |2τ 2(2
τ+ 1
τ0
)] [vi j
− |vi j |2xi j − (vi j · xi j )vi j√(vi j · xi j )2 − |vi j |2[|xi j |2 − (Ri + R j )2]
⎤⎦ ,
(3)
where vi j = vi − v j is the relative velocity of the twonodes, R is the equivalent radius of an agent, τ is themean “free time” for the currentmovement state, whichcorresponds to the timeduration between two collisionswith other agents in the network. The parameters k andτ0 are set as constants.
Let r(t) = (x(t), y(t)) and v(t) = (vx (t), vy(t))be the measured position and velocity of agent i at aset of discretely sampled time: t = t1, t2, . . . , tn . Theincrement in the x-component of the velocity can bewritten as
Δvi x = vi x (t + Δt) − vi x (t)
=∑j �=i
[ai j
F f x (i, j)(t)
m
+(1 − ai j )Fsx (i, j)(t)
m
]Δt
=∑j �=i
ai j Mi j (t) + Ri (t), (4)
where vi x , Ff x , and Fsx are the x components of vi ,F f , and Fs , respectively, m is a parameter charac-terizing inertia, Δt is the time step of the dynam-ics determined by the evolution rate of the system,Mi j (t) = [Ff x (i, j) − Fsx (i, j)]Δt/m, and Ri (t) =
123

16 C.-W. Su et al.
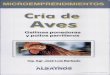
Fig. 2 (Color online)Hidden connections in adynamical pedestriancrowd. Agents are specifiedby circles or squares, andthe interactions betweenfriends, as characterized byEq. (2), are represented bylinks. For example, the focalagent i (square) in thesketch map has five friends.Red and yellow linkscorrespond to exclusion andattraction, respectively. Theline width indicates theassociated strength of theconnection or interaction“force”
∑j �=i Fsx (i, j)Δt/m. Thematrix elementai j indicates
the possible existence of a link between agents i andj : If i and j are friends, i.e., they interact with eachother according to Eq. (2), we have ai j = 1. Other-wise, ai j = 0. What is needed for Eq. (4) is pairs ofsuccessive data points with Δt apart, and these pairsdo not need to be consecutive. Equation (4) can bewritten in matrix form as Δv = M · a + R, whereY ≡ Δv − R = M · a.
For any agent, the connection coefficient vectora characterizing the agent’s relationship with otheragents in the crowd is sparse because the expectednumber of friends ki is generally much smaller thanthe system size N , making it applicable for the com-pressive sensing framework. Once Y and M have beencalculated from data, the vector a for each agent canbe estimated through L1-RLS optimization. Matchingthe local connection structures of all agents gives thetopology of the underlying network.
As a concrete example, we consider a crowd ofN = 100 agents that move according to the interac-tion rules in Eqs. (2) and (3) in a 2D domain with peri-odic boundary conditions. Figure 2a–d shows exam-ples of the friendship network of a focal agent revealedby our method. To characterize the performance, wedefine the following prediction errors for existent and
nonexistent links: ε1 = (1/ki )∑
j∈ |ai j − ai j | andε0 = [1/(N − ki − 1)]∑ j /∈ |ai j − ai j |, respectively,where Ω is the set of ki neighbors of node i . Figure 3ashows the errors of the L1-RLS method versus themovement noise, whereas for comparison, the resultsfrom the conventional compressive sensing method aredisplayed in Fig. 3b. We see that the prediction errorincreases monotonically with σ . Due to noise, the con-ventional compressive sensing method leads to largeerrors, but those associated with the L1-RLS methodare much smaller. The movement noise refers to thenoise or stochastic fluctuations in agents’ velocity, withstrength given by σ ≡ σ/〈|Δv|〉, where σ is the stan-dard deviation of Gaussian noise, and 〈|Δv|〉 is theabsolute velocity increment averaged over all agentsin the system. Figure 3c, d shows ε1 and ε0 versus thedata amount T/N , respectively. In general, in the pres-ence of noise, the errors with L1-RLS are smaller thanthose with L1 method.
4 Optimal detection based on L1-RLS
We now address the issue of optimal detection. The keyparameter in the L1-RLSmethod (Eq. 1) is λ, on whichthe performance depends, especially when strong noiseis present. Figure 4a shows the prediction error ε1 ver-
123

Optimizing optimization: accurate detection of hidden interactions 17
Fig. 3 (Color online) Compressive sensing-based reconstruc-tion of hidden relationship in a pedestrian crowd. a, b Predictionerror as a function of the relative noise strength σ , where ε1 andε0 are the errors for the existent (ai j = 1, friend) and nonexistent(ai j = 0, stranger) links, respectively. The normalized amountof data for prediction is T/N = 0.9. c, d Errors ε1 and ε0 ver-
sus the normalized data amount T/N , respectively, for a numberof values of σ (0, 0.01, 0.02, and 0.05). The parameter settingis N = 100, κ = 2, k = 0.5, τ0 = 0.5, R = 0.01, m = 60,Δt = 0.1, andλ = 10−3 for L1-RLS.All the results are averagedover 1000 independent network realizations
sus η ≡ − log10 λ, where the value of λ varies overseveral orders of magnitude. For large values of λ, themethod yields a = 0. As a result, the values of ε1are about one in the region of small η values. As η isincreased from one, a non-monotonic behavior in ε1arises. The overall behavior of the error indicates theexistence of an value of λopt = 10−η0 , at which ε1 isminimized. For values of η much larger than η0, theerror is saturated, where the contribution of ||a||1 itemin Eq. (1) becomes negligible and the method degener-ates to the conventional least squares.
From the result in the inset of Fig. 4d, we see thatthe optimal value λopt increases as the noise strengthσ becomes larger. This average result suggests that ifyou want to apply the L1-RLS method to a systemunder stronger noise, you should take a larger valueof λ. However, a complication is that the value of λoptmay fluctuate in a wide range even for the same noiselevel. To determine the actual value of λopt is thus anissue of practical significance. One possible approach
is to find the zero point in the gradient of ε1. As shownin Fig. 4b, the zero point can be obtained numericallybasedon the incrementΔε1 as a functionofη.However,in order to achieve this goal, the prior knowledge of theconnection structure of the system as characterized bya is needed for calculating Δε1 and the value of λopt.But in realistic applications, the true vector a is notavailable and thus this way cannot get through. Is itpossible to extract available information from the dataitself? Now let us answer this question. The deviationof a from the actual vector due to the variance of λ (orequivalently, the variance of η) can be characterized bythe following quantity:
δ A(η) ≡ 1
N − 1
N−1∑j=1
|ai j (η) − ai j (η + δη)|, (5)
where ai j (η) is the L1-RLS prediction for a specific η
value, and δη is a small positive variation. Figure 4cshows the value of δ A(η) as a function of η, where itcan be seen that the optimal parameter λopt for which
123

18 C.-W. Su et al.
Fig. 4 (Color online) Optimizability of L1- RLS: emergence ofoptimal weighting parameter λopt. a Prediction error ε1 and b thecorresponding increment Δε1 versus η ≡ − log10 λ. c Value ofδ A versus η, in which the beginning point (marked by the arrow)
of the large peak corresponds to the value η0 for which ε1 is min-imized. Other parameters are T = 0.9N and σ = 10−2. d–f Theaverage quantities corresponding to those in a–c, respectively,over 500 realizations
123

Optimizing optimization: accurate detection of hidden interactions 19
ε1 is minimized (Fig. 4a) is related to the starting pointof the large peak, as marked by the yellow arrow inFig. 4c. The value of λopt can then be estimated throughthe following steps: (I) To calculate Y , M, and then abased on Eq. (1), (II) to plot δ A(η) as a function of η
(cf., Fig. 4c), and (III) to identify the startingpoint of thelarge peak. In addition, for weak noise, two large peaksof similar size can emerge. In this case, the secondpeak can be chosen to determine the value of λopt. Theexistence of an optimal value of λ thus makes L1-RLSa powerful method for solving the data-based inverseproblemof active body systems in a noisy environment.
5 Relative entropy interpretation for L1-RLS
Theoretical insights into the emergence and determi-nation of the optimal parameter λopt can be gainedthrough the concept of relative entropy [43]. In par-ticular, Eq. (1) can be rewritten as
a ≈ argmin {||Y − M · a||22 + λ||a||1}. (6)
This form of objective function allows us to obtainan explicit relation between optimizing L1-RLS andthe relative entropy minimization. Assume that the ele-ments a j of the vector a follow the Laplace distribution[44]: a j ∼ Laplace(0, b) for j = 1, 2, . . . , N −1. Fur-ther assume Gaussian distribution for the elements ξmof the bias vector ξ = Y − M · a: ξm ∼ N(0, σ 2) form = 1, 2, . . . , T . The weighted relative entropy for theempirical distributions P(a) and P(ξ) with respect tothe model Laplace and Gaussian distributions [PL(a)
and PG(ξ), respectively] can be written as
H(a) = N · E[log P(a) − log PL(a)]+ T · E[log P(ξ) − log PG(ξ)]
= −{N · E[log PL(a)] + T · E[log PG(ξ)]}+C
= −⎡⎣∑
j
log PL(a j ) +∑m
log PG(ξm)
⎤⎦ + C
= [1/(2σ 2)](||Y − Ma||22 + (2σ 2/b)||a||1)+C
where C is a constant and E[·] denotes the expecta-tion value. The weights N and T are the numbers ofsamples for a and ξ , respectively. The parameter b char-acterizes the sparsity of a: A sparser a corresponds toa smaller value of b. Remarkably, the form of the rela-tive entropy H(a) is identical to the objective functionin Eq. (6), suggesting that minimization of H(a) has a
similar effect as L1-RLS optimization in Eq. (1). Thissimilarity leads to λopt ∼ 2σ 2/b, a qualitative relationof the optimal value λopt with the sparsity parameter band the noise strength σ . While the scaling relation forλopt is obtained under the assumptions of PLaplace(a)
and PGauss(ξ), these distributions are the basic approx-imations employed in the development of the compres-sive sensing framework. The scaling relation indicatesthat for sparser connection with larger noise varianceσ 2, the optimal value λopt generally takes on larger val-ues, which coincides qualitatively with the numericalresults.
6 Summary and discussion
To summarize, we have developed an optimal compres-sive sensing-based framework for uncovering hiddenconnections (relationships) in pedestrian crowds basedon individual movement data. The framework naturallyinherits the appealing virtue of compressive sensing,whichmeans the lowdata requirement. The remarkablefeature is, by incorporating L2 optimization into L1-based compressive sensing, an optimal relative weight-ing of the two types of optimization arises, at which theframework can accurately predict the hidden network-ing relationships even in the presence of strong noise.We provide a practical method to estimate the opti-mal weights. This overcomes a fundamental difficultyin compressive sensing-based reconstruction method[22] that noise causes severe performance degradation.Active body systems arise in various fields of scienceand engineering and are a class of complex dynami-cal systems that have not been extensively studied. Ouroptimized compressive sensing framework representsthe first attempt to address the inverse or reverse engi-neering problem for such systems.
Our relative entropyperspective excavates the intrin-sic connotation for the L1-RLS optimization, and therelationship λopt ∼ 2σ 2/b we obtained has practicalsignificance in promoting the feasibility of compres-sive sensing for real-world systems with noise. In theL1-RLS optimization as Eq. (1) shows, the L1 termis rooted in the fact that the solution to the problemis known a priori to be sparse and can be roughlydescribed by Laplacian distribution, while the L2 termis presented based on the central limit theorem whichstates that the system noise can be approximated asGaussian. Actually, the framework we proposed for thegiven original inverse problem can also be extended to
123

20 C.-W. Su et al.
more general cases, rather than limited to the form ofEq. (1). It depends onwhat the specific prior knowledgeis. What is more, as the objective function is designedthrough combining different characteristics of the sys-tem according to the particular prior knowledge andthe minimum relative entropy principle, our optimiza-tion technique can be adopted based on an appropriateweight parameter to explore the better optimal solution,namely to optimize optimization.
Acknowledgements ZGH thanks Dr. Yuzhong Chen and Prof.Tian Liu for helpful discussion. This work was supported byNSFC Nos. 11275003, 71631002, 61431012, and 11647052.XW is supported by NSFC No. 61773255. ZGH gratefullyacknowledges the support of K. C. Wong Education Foundation,Open Research Fund of the State Key Laboratory of CognitiveNeuroscience and Learning, and Scientific Research ProgramFunded by Shaanxi Provincial Education Department (ProgramNo.17JK0553). YCL would like to acknowledge support fromthe Vannevar Bush Faculty Fellowship program sponsored bythe Basic Research Office of the Assistant Secretary of Defensefor Research and Engineering and funded by the Office of NavalResearch through Grant No. N00014-16-1-2828.
Compliance with ethical standards
Conflict of interest The authors declare that they have no con-flict of interest.
References
1. Helbing, D., Molnár, P.: Social force model for pedestriandynamics. Phys. Rev. E 51, 4282 (1995)
2. Lakoba, T.-I., Finkelstein, N.-M., Finkelstein, N.-M.: Modi-fications of theHelbing–Molnr–Farkas–Vicsek Social ForceModel for Pedestrian Evolution. Society for Computer Sim-ulation International, San Diego (2005)
3. Parisi, D.-R., Gilman, M., Moldovan, H.: A modification ofthe social force model can reproduce experimental data ofpedestrian flows in normal conditions. Physica A 388(17),3600–3608 (2009)
4. Karamouzas, I., Skinner, B., Guy, S.-J.: Universal powerlaw governing pedestrian interactions. Phys. Rev. Lett. 113,238701–238701 (2014)
5. Ryoo, M.S., Aggarwal, J.K.: Stochastic representation andrecognition of high-level group activities. Int. J. Comput.Vis. 93, 183–200 (2011)
6. Zhang, S.-P., Zhang, J.-Q., Huang, Z.-G., Guo, B.-H., Wu,Z.-X., Wang, J.: Collective behavior of AI population: tran-sition from optimization to game. Nonlinear Dyn (2019).https://doi.org/10.1007/s11071-018-4649-4
7. Arnold, W., Vamsi, M., Wageeh, B., Prasad, Y.: A suspi-cious behaviour detection using a context space model forsmart surveillance systems. Comput. Vis. Image Underst.116, 194–209 (2012)
8. Guo, P., Miao, Z.-J., Zhang, X.-P., Shen, Y., Wang, S.:Coupled observation decomposed hidden markov model for
multiperson activity recognition. IEEE Trans. Circuits Syst.Video Technol. 22, 1306–1320 (2012)
9. Li, R.-N., Chellappa, R., Zhou, S.-K.: Recognizing interac-tive group activities using temporal interaction matrices andtheir riemannian statistics. Int. J. Comput. Vis. 101, 305–328(2013)
10. Choi,W., Savarese, S.: Understanding collective activities ofpeople from videos. IEEE Trans. Pattern Anal. Mach. Intell.36, 1242–1257 (2014)
11. Liu, L., Peng, Y.-X., Wang, S., Liu, M., Huang, Z.-G.: Com-plex activity recognition using time series pattern dictionarylearned from ubiquitous sensors. Inf. Sci. 340–341, 41–57(2016)
12. Liu, L., Wang, S., Peng, Y.-X., Huang, Z.-G., Liu, M., Hu,B.: Mining intricate temporal rules for recognizing complexactivities of daily living under uncertainty. Pattern Recognit.60, 1015–1028 (2016)
13. Liu, L.,Wang, S., Su, G.-X., Huang, Z.-G., Liu,M.: Towardscomplex activity recognition using a Bayesian network-based probabilistic generative framework. Pattern Recognit.68, 295–309 (2017)
14. Szabó, G., Czárán, T.: Defensive alliances in spatial modelsof cyclical population interactions. Phys. Rev. E 64, 042902(2001)
15. Dobrinevski, A., Alava, M., Reichenbach, T., Frey, E.:Mobility-dependent selection of competing strategy asso-ciations. Phys. Rev. E 89, 012721 (2014)
16. Szabó, P., Czárán, T., Szabó, G.: Competing associations inbacterial warfare with two toxins. J. Theor. Biol. 248, 736–744 (2007)
17. Cheng,H.-Y.,Yao,N.,Huang, Z.-G., Park, J., Do,Y., Lai, Y.-C.: Mesoscopic interactions and species coexistence in evo-lutionary game dynamics of cyclic competitions. Sci. Rep.4, 7486 (2014)
18. Bertero, M., Bocacci, P.: Introduction to inverse problem inimaging. Opt. Photonics News 12(10), 46–47 (1998)
19. Beck, A., Teboulle, M.: A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAMJ. Imaging Sci. 2(1), 183–202 (2009)
20. Tropp, J.-A., Wright, S.-J.: Computational methods forsparse solution of linear inverse problems. Proc. IEEE 98(6),948–958 (2010)
21. Giménez, J., Botella-Estrada, R., Hernández, D., Carbonell,M., Martínez, M.-A., Guillén, C., Vázquez, C.: The convexgeometry of linear inverse problems. Found. Comp. Math.12(6), 805–849 (2010)
22. Wang, W.-X., Lai, Y.-C., Grebogi, C.: Data based identifi-cation and prediction of nonlinear and complex dynamicalsystems. Phys. Rep. 644, 1–76 (2016)
23. Babacan, S.-D., Molina, R., Katsaggelos, A.-K.: Bayesiancompressive sensing using Laplace priors. IEEE Trans.Image Process. 19(1), 53–63 (2009)
24. Ji, S., Dunson, D., Carin, L.:Multitask compressive sensing.IEEE Trans. Signal Process. 57(1), 92–106 (2009)
25. Wright, J., Yang, A.-Y., Ganesh, A., Sastry, S.-S., Ma, Y.:Robust face recognition via sparse representation. IEEETrans. Pattern Anal. Mach. Intell. 31, 210–227 (2009)
26. Potter, L.-C., Ertin, E., Parker, J.-T., Cetin, M.: Sparsity andcompressed sensing in radar imaging. Proc. IEEE 98(6),1006–1020 (2010)
123

Optimizing optimization: accurate detection of hidden interactions 21
27. Zibulevsky, M., Elad, M.: L1–L2 optimization in signal andimage processing. IEEE Sig. Process. Mag. 27(3), 76–88(2010)
28. Wang,W.-X., Yang, R., Lai, Y.-C., Kovanis, V., Grebogi, C.:Predicting catastrophes in nonlinear dynamical systems bycompressive sensing. Phys. Rev. Lett. 106, 154101 (2011)
29. Wang, W.-X., Yang, R., Lai, Y.-C., Kovanis, V., Harrison,M.A.F.: Time-series-based prediction of complex oscilla-tor networks via compressive sensing. Europhys. Lett. 94,48006 (2011)
30. Wang, W.-X., Lai, Y.-C., Grebogi, C., Ye, J.-P.: Networkreconstruction based on evolutionary-game data via com-pressive sensing. Phys. Rev. X 1, 1–7 (2011)
31. Walk, P., Jung, P.: Compressed sensing on the image of bilin-earmaps. In: IEEE International Symposiumon InformationTheory Proceedings, pp. 1291–1295 (2012)
32. Duarte, M.-F., Baraniuk, R.-G.: Spectral compressive sens-ing. Appl. Comput. Harmon. Anal. 35(1), 111–129 (2013)
33. Tang, S.-Q., Shen, Z.-S., Wang, W.-X., Di, Z.-R.: Uncover-ing transportation networks from traffic flux by compressedsensing. Euro. Phys. J. B 88, 1–7 (2015)
34. Han, X., Shen, Z.-S., Wang, W.-X., Di, Z.-R.: Robust recon-struction of complex networks from sparse data. Phys. Rev.Lett. 114, 028701 (2015)
35. Su, R.-Q., Wang, W.-X., Wang, X., Lai, Y.-C.: Data-basedreconstruction of complex geospatial networks, nodal posi-tioning and detection of hidden nodes. R. Soc. Open Sci. 3,150577 (2016)
36. Donoho, D.-L.: Compressed sensing. IEEE Trans. Inf. The-ory 52, 1289–1306 (2006)
37. Candes, E.-J.,Wakin,M.-B.:An introduction to compressivesampling. IEEE Signal Process. Mag. 25, 21–30 (2008)
38. Duarte, M.-F., Eldar, Y.-C.: Structured compressed sensing:from theory to applications. IEEE Trans. Signal Process. 59,4053–4085 (2011)
39. Gan, H.-P., Li, Z., Li, J., Wang, X., Cheng, Z.-F.: Compres-sive sensing using chaotic sequence based on Chebyshevmap. Nonlinear Dyn. 78, 2429–2438 (2014)
40. Abdechiri, M., Faez, K., Amindavar, H., Bilotta, E.: Thechaotic dynamics of high-dimensional systems. NonlinearDyn. 87, 1–14 (2016)
41. Zhang, S.-P., Dong, J.-Q., Liu, L., Huang, Z.-G., Huang, L.,Lai, Y.-C.: Reinforcement learning meets minority game:toward optimal resource allocation. Phys. Rev. E, to be pub-lished
42. Kim, S.-J., Koh, K., Lustig, M., Boyd, S.: An interior-pointmethod for large-scale l1-regularized least squares. J. Mach.Learn. Res. 8, 1519–1555 (2007)
43. Goodfellow, I., Bengio, Y., Courville, A.: Deep Learning.MIT Press, Cambridge (2016)
44. Zhao, Q., Meng, D.-Y., Xu, Z.-B., Zuo, W.-M., Yan, Y.: l1-norm low-rank matrix factorization by variational Bayesianmethod. IEEETrans. Neural Netw. Learn. Syst. 26, 825–839(2015)
Publisher’s Note Springer Nature remains neutral with regardto jurisdictional claims in published maps and institutional affil-iations.
123






















![Reinkowski Hidden Believers Hidden Apostates[1]](https://img.pdfslide.us/doc/110x75/577cdfdb1a28ab9e78b2245d/reinkowski-hidden-believers-hidden-apostates1.jpg)