-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
1/24
Paper accepted for publication in Renewable Energy
(http://www.sciencedirect.com/science/journal/09601481)
DOI: 10.1016/j.renene.2006.04.013
Optimization of Control Strategies for Stand-Alone
RenewableEnergy Systems with Hydrogen Storage
Rodolfo Dufo-Lpez1, Jos L. Bernal-Agustn1,*, Javier
Contreras2
1 Electrical Engineering Department University of Zaragoza.
Calle Mara de Luna, 3. E-50018 Zaragoza (Spain).
2Applied Mechanics and Project Engineering Department University
of Castilla La Mancha. Campus Universitario s/n. 13071 Ciudad Real
(Spain).
Abstract
This paper presents a novel strategy, optimized by genetic
algorithms, to control stand-alone hybrid renewable electrical
systems with hydrogen storage. The strategy optimizes the
control of the hybrid system minimizing the total cost
throughout
its lifetime. The optimized hybrid system can be composed of
renewable sources (wind, PV and hydro), batteries, fuel cell,
AC generator, and electrolyzer. If the renewable sources produce
more energy than the one required by the loads, the spare
energy can be used either to charge the batteries or to produce
H 2 in the electrolyzer. The control strategy optimizes how the
spare energy is used. If the amount of energy demanded by the
loads is higher than the one produced by the renewable
sources, the control strategy determines the most economical way
to meet the energy deficit. The optimization of the various
system control parameters is done using Genetic Algorithms. This
paper explains the strategy developed and shows its
application to a PV-Diesel-battery-hydrogen system.
Keywords:Hybrid Systems, Control Strategies, Genetic
Algorithms.
1. Introduction
The electric generation hybrid systems are usually more reliable
and lest costly than the systems than use a
single source of energy [1].
When designing a hybrid system both the sizing of the elements
and the most adequate control strategy must be
obtained. Obtaining a good control strategy is essential, since
the performance of a PV-hydrogen system can be
significantly affected by relatively small changes made in the
control strategy [2]. However, to design a hybrid
system is a complicated task. The mathematical design problem
(sizing and control) involves a significant
number of variables [3]. That is why classic design techniques
are not able to obtain good results, being
necessary to apply other techniques which allow obtaining
satisfactory results. In other design problems with a
high number of variables, heuristic techniques have been
successfully applied [4]. One of the most commonlyused heuristic
techniques is based on Genetic Algorithms [5]. Genetic Algorithms
present the advantage of
having low computational requirements obtaining good solutions
in reasonable time.
As mentioned before, a very important aspect when designing a
hybrid system is the determination of the most
adequate control strategy. Numerous studies have developed
control strategies applicable to hybrid systems. In
[6] several control strategies for PV-Diesel systems including
batteries are described. Likewise, the HOMER
optimization model [7] uses relatively simple strategies based
on the ones studied by Barley et al. [6] and it is
able to obtain an optimal design of a hybrid system by selecting
the most appropriate strategy. The program
*Corresponding author. Tel.: +34 976 76 19 21; fax: +34 976 76
22 26.
E-mail:[email protected] (R. Dufo-Lpez). [email protected] (J.L.
Bernal-Agustn). [email protected] (J. Contreras)
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
2/24
2
HYDROGEMS [8], compatible with TRNSYS [9], simulates
hydrogen-based hybrid systems, although it is not
an optimization program. Another program applied to
hydrogen-based hybrid systems, Hybrid2 [10, 11],
outperforms HOMER and generates many control strategies;
nevertheless it is a simulation program, not an
optimization tool. These hybrid systems, which include renewable
energy sources and hydrogen, have also been
studied by many researchers [12-17]. In [18] highly complex
systems including renewable sources, ACgenerators and fuel cells
are analyzed. In another work [19] the optimization of stand alone
renewable-based
hydrogen generation systems through control strategies is dealt
with. Another author [2] describes control
strategies of PV-hydrogen based hybrid systems (photovoltaic
generator, batteries, electrolyzer and fuel cell)
based on the on/off-switching of the electrolyzer and the fuel
cell, depending on the value of the SOC(State of
Charge) of the batteries. In addition, [20] analyzes a renewable
energy system, including hydrogen, as a long-
term energy storage source, with a battery bank as a short-term
energy storage, where the energy management is
controlled through the SOCof the batteries.
In [21] the economic evaluation of a hybrid
wind/photovoltaic/hydrogen generation systems is studied and
compared to a traditional hybrid energy system with battery
storage, showing a clear economic advantage of the
traditional wind/PV/battery system over the wind/PV/hydrogen
system. However, this situation may change in
the near future due to the decrease in the cost of fuel cells
and electrolyzers.
In [22] a method to optimize the design and dispatch of
wind-diesel systems with hydrogen storage is presented.
This paper originates from a previous work by the authors [23]
in which the HOGA (Hybrid Optimization by
Genetic Algorithms) program is introduced. In this previous
paper both the configuration of a PV-Diesel system
with AC loads and the control strategy are optimized using
Genetic Algorithms. The control strategies in HOGA
are the same as the ones used in HOMER. In this new paper
several improvements are introduced. First, the
electric energy demand can be either AC or DC, allowing for
hydrogen demand as well. It is also possible to use
two different methods to estimate the lifetime of the batteries:
either Average of full equivalent cycles (used by
the HOMER program) or Rainflow [24]. Moreover, it is possible to
apply two different mathematical models
to the battery operation: KiBaM model [25] or Ah model [26]. In
addition, the efficiency of the inverter
variable as a function of the output power is analyzed. Other
features of the design tool include the possibility to
deal with different types of energy sources (hydro, wind, PV,
fuel cells and Diesel generators) and different
types of energy storage (batteries and electrolyzers with
hydrogen tanks). Finally, it is also remarkable the novel
control strategy developed and optimized by Genetic
Algorithms.
In this paper we describe a new control strategy where the
associated operating costs of every element are
specified, as well as the control variables used by the
strategy. Additionally, we present an example in which a
control strategy for a PV-Diesel-battery-hydrogen system with
AC, DC and hydrogen demands is optimized.
2. Control strategy of the hybrid system
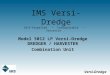
The hybrid system that will be used to explain the control
strategy described in this paper is shown in Fig. 1. It
can be observed that the hybrid system can include PV panels,
wind turbines, batteries, charge regulator, hydro
turbine, AC generator (Diesel, but also any type of generator
can be modeled), battery charger (AC/DC
converter), inverter (DC/AC converter), fuel cell, H2tank and
electrolyzer. The fuel cell can be either fed by the
H2previously produced by the electrolyzer or by externally
purchased H2. Both the wind turbines and the hydro
turbines can be connected to the AC or DC buses.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
3/24
3
Pre_DC
Electrolyzer H2tank
AC Generator
HYDRO
WIND
Pre_AC
D.C.
LoadUDC
UAC
Pload_DC
Batteries
H2Load
Fuel Cell
Pload_AC
BatteryCharger
PV
Inverter
A.C.Load
Charge
Regulator
Fig. 1. Control strategy of the hybrid system
Hourly intervals are considered for the design strategy
calculations, where all the involved variables are assumed
to be constant throughout these intervals.
Two genetic algorithms, main and secondary, are used in the
design process. The main one searches for possible
component configurations of the hybrid system (i.e. the power
and features of each element), whereas the
secondary one searches for the best strategy for each of the
configurations found by the main algorithm. Both
algorithms work jointly to find the optimal configuration of the
components and the best control strategy. A
previous paper [23] describes both algorithms in detail. The
difference between the previous paper and the one
presented here is due to the improvement in the mathematical
models and the new control strategy developed.
Both algorithms are described in section 4.
The objective function to minimize in the optimization process
is the total Net Present Cost (NPC) of the system.
TheNPCrepresents the investment costs plus the discounted
present values of all future costs during the lifetime
of the system. To calculate the NPCof the system we simulate it
throughout its lifetime, obtaining the energy
produced and consumed by the components, their own lifetimes,
the number of times in which the components
must be replaced, the operating and maintenance costs, the fuel
costs, etc.As a basic control rule, the energy produced by
renewable sources must be preferentially used to feed the
loads.
For every hour, if the renewable sources (PV, wind and hydro)
produce more energy than is demanded, the
surplus power (Pcharge) can be used to charge the batteries or
to produce H2 in the electrolyzer. This process is
called CHARGE. Pcharge is the total converted spare power on the
DC side (spare DC power plus spare AC
power, the latter one multiplied by the AC/DC converter
efficiency), since both the batteries and the electrolyzer
are on the DC side. The decision whether the spare energy is
used to charge the batteries or to produce H 2in the
electrolyzer depends on the value of Pcharge, as shown in
section 3.
If, on the contrary, the renewable sources are unable to provide
for all the energy demand, the load that has not
been met, Pdischarge, should be produced either by the batteries
or the AC generator or the fuel cell. This process is
called DISCHARGE. During the DISCHARGEprocess the costs of
providing the required energy (using the
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
4/24
4
batteries, the AC generator and the fuel cell) must be
evaluated. The system will produce the energy that is less
costly, as explained in section 3.
There are 12 control variables of the hybrid system and all of
them are optimized by the secondary genetic
algorithm: Pmin_gen, Pmin_FC, SOCmin, Pcritical_gen, SOCstp_gen,
Pcritical_FC, SOCstp_FC,H2TANKstp, Plim_charge, P1gen, P1FC,
and P2. All these variables are simultaneously optimized by the
secondary algorithm. The value determined bythis algorithm is
denoted by the subindex _opt.
In the following subsections the first 8 control variables are
described, and also how to determine the control
strategy from them. The last 4 variables are described in
section 3.
2.1. Minimum AC generator power
The minimum power of an AC generator is generally set to the
minimum value recommended by the
manufacturer, Pmin_gen, below which it cannot work. Besides, the
specific consumption (/kWh) for low powers is
always much higher than for high powers. This means that it may
be possible for an optimal minimum power to
exist with a higher value (as compared to the one recommended by
the manufacturer) and below which the
generator should not work, due to its high specific consumption.
Due to this, the design tool presented in this
paper searches for the optimal value of Pmin_gen, named
Pmin_gen_opt, which is between Pmin_gen and the nominal
power of the generator.
2.2. Minimum fuel cell power
Fuel cells have a very low minimum power, Pmin_FC, and a very
low consumption at zero power; some of them
have no consumption under no-load conditions. However, the
program is also able to optimize the value of
Pmin_FC, named Pmin_FC_opt, which ranges between Pmin_FCand the
nominal power of the fuel cell.
2.3. Minimum battery SOC
The batteries have a minimum State of Charge recommended by the
manufacturer, SOCmin (%), below which
they should not work. If we use the Rainflow battery life model,
it is possible that the optimal SOCis higher
than the one recommended by the manufacturer, since the number
of cycles depends on the depth of the
discharge, and, therefore, on the percentage of the discharge of
the batteries. The program optimizes the value of
SOCmin, named SOCmin _opt, which is between SOCminand
SOCmax(100% of the SOC).
2.4. Critical power, SOCsetpoint and H2tank setpoint
2.4.1 AC generator
Due to the aforementioned feature of an AC generator, its high
specific consumption at low power, it may be
interesting for it to produce more than the demanded power when
the power that must be supplied by the AC
generator has a low value (lower than the critical power limit,
Pcritical_gen). That extra power could be used to
charge the batteries up to the SOCvalue, named
SOCstp_gen(batteries SOCsetpoint for the AC generator), or to
produce H2in the electrolyzer to fill the H2tank up to the value
named H2TANKstp(setpoint for the amount of H2
stored in the tank, measured in kg).
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
5/24
5
The program optimizes the value of Pcritical_gen, named
Pcritical_gen_opt, which ranges between 0 and the maximum
value of the hourly power consumed by the demand, Pmax_load. The
program also optimizes the value of
SOCstp_gen, named SOCstp_gen_opt, which ranges between SOCminand
SOCmax. Similarly, the value of H2TANKstp,
namedH2TANKstp_opt, which ranges between 0 and the maximum
capacity of the H2tank,H2TANKmax_size(kg), is
optimized.The control strategy related to these variables is as
follows:
If the power that the generator must supply (Pdemand) is below
Pcritical_gen_opt, then the generator works at nominal
power, PN_gen, meeting the demand Pdemand, where the spare
power, Pspare= PN_gen Pdemand, is used as follows:
If (PsparePlim_charge), then the Psparepower is used to charge
the batteries up to the SOCstp_gen_optstate, and, if
there is extra power, it is used to generate H2in the
electrolyzer up to theH2TANKstp_opttank level. Plim_charge
is the power below which it is more economical to store energy
in the batteries than in the H 2 tank. It is
defined in section 3.2.
If (Pspare> Plim_charge), then the Psparepower is used to
generate H2in the electrolyzer up to theH2TANKstp_opt
level, and, if there is extra power, it is used to charge the
batteries up to the SOCstp_gen_optlevel.
If, after using the spare energy to charge the batteries up to
the SOCstp_gen_opt level and to generate H2 in the
electrolyzer (whatever the order is), there still exists some
extra energy, then the generator will not work at
nominal power, but at a power at which the energy is not wasted,
considering its minimum value, Pmin_gen_opt.
2.4.2 Fuel cell
Analogously to the generator case, the program optimizes the
value of Pcritical_FC, named Pcritical_FC_opt, ranging
between 0 and Pmax_load. If the power that must be supplied by
the fuel cell is lower than Pcritical_FC_opt, then the
fuel cell works at nominal power meeting the demand, and the
spare energy is used to charge the batteries.
The program also optimizes the value of SOCstp_FC(batteries SOC
setpoint for the fuel cell), named SOCstp_FC_opt,ranging between
SOCminand SOCmax.
If, after trying to use the spare energy to charge the
batteries, there is still extra energy, the fuel cell does not
work at nominal power, but at a power without spare energy,
considering the Pmin_FC_opt value.
3. CHARGE and DISCHARGE processes
3.1. State definition: CHARGE or DISCHARGE
Fig. 2 shows whether the system is in CHARGE (the renewable
sources produce more energy than what is
demanded) or in DISCHARGE (the renewable sources produce less
energy than what is demanded) for eachhour, as well as the way to
calculate the values of Pchargeor Pdischargeas a function of the AC
load, the H2load, the
DC load and the energy produced by the renewable sources.
In each hour, the H2load (for external consumption) is initially
met by the H2stored in the tank. If the H2stored
is not enough, the remaining H2, named H2_rest (kg), must be
produced in the electrolyzer. This H2_rest (kg)
produced in the electrolyzer is comparable to the DC load,
denoted by PH2_rest_conv_DC(W):
PH2_rest_conv_DC =H2_rest 1000/ Elyz (1)
where Elyz (kg H2/kWhinput) is the amount of H2produced for each
kWh of electrical energy consumed in the
electrolyzer. This PH2_rest_ conv_DCload behaves as a DC
load.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
6/24
6
Fig. 2. Flowchart of the CHARGE and DISCHARGE processes
We denote by Pre_DC to the power produced by the renewable
sources that are in the DC bus and Pre_AC to the
power produced by the renewable sources that are in the AC bus.
Likewise, we denote by Pload_DC to the power
consumed by the loads in the DC bus (including PH2_rest_
conv_DC) and Pload_AC to the power consumed by the loads
in the AC bus. We can enumerate these variables that appear in
Fig. 2 as follows:
AC/DCis the efficiency of the battery charger (AC/DC
converter)
cosis the power factor of the AC loads
Sis the apparent power at the inverter output (VA):
S= (Pload_AC- Pre_AC)/ cos (2)
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
7/24
7
inv (S) is the inverter efficiency
Sinv is the nominal apparent power of the inverter (VA).
Although the inverter can withstand relatively big
overloads, it cannot do so for long periods. Since we use hourly
intervals, we assume that the efficiency of the
inverter can reach as much as Sinv.
inv(Sinv) is the efficiency of the inverter at its apparent
nominal power
Pinv_max is the maximum active power that can be produced by the
inverter:
Pinv_max= Sinvcos/ inv(Sinv) (3)
3.2. CHARGE process
In the case of having spare energy for a 1 hour period
(Pcharge> 0), this energy is used to charge the batteries
and/or to produce hydrogen in the electrolyzer (which is stored
in the hydrogen tank).
Depending on which of the two devices has the lowest cost of
cycling energy (i.e. the operating and maintenancecost for 1 hour,
including the depreciation and replacement costs), either the
batteries are charged as much as
possible with the spare energy or the electrolyzer works at its
highest possible power.
3.2.1 Cost of cycling energy through the batteries
The cost of cycling the energy corresponding to a certain power
P (kW) through the batteries during 1 hour,
Ccycling_bat (), including the energy lost, can be calculated
as:
1000
global_batcycles_eqDCbat_pN
battcycling_ba
NUNC
CPC =
(4)
whereCbat() is the battery bank acquisition cost, CN(Ah) is the
nominal capacity of the battery, Nbat_p is the
number of batteries in parallel, UDC(V) is the DC bus voltage
and Ncycles_eqis the average of a battery lifetime in
equivalent full cycles. We have assumed that the batteries can
cycle a certain amount of energy that, divided by
its nominal capacity, gives the average lifetime in equivalent
full cycles. Finally, global_bat is the overall
efficiency of the batteries (roundtrip efficiency). In
Ccycling_batwe do not consider the O&M costs of the
batteries;
we consider that they are fixed during the year, therefore, they
do not depend on the performance of the batteries.
3.2.2 Cost of cycling energy through the electrolyzer
The cost of cycling the energy corresponding to a certain power
P (kW) during 1 hour, where the energy is
stored as H2in the tank, later becoming fuel cell energy, is
():
Elyz FCO&M_Elyz O&M_FC
Elyz FC
cycling_Elyz -FC
Elyz FC
+ + +
=
C CC C
Life LifeC
(5)
where Ccycling_Elyz-FC, unlike Ccycling_bat, does not depend on
the power (since the electrolyzer and the fuel cell
lifetimes,LifeElyzand LifeFC(h), respectively, have been
considered as not dependent on the power), as well as
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
8/24
8
CO&M_Elyzand CO&M_FC, the O&M costs of the
electrolyzer and the fuel cell (/h), respectively. CElyzand CFC
()
are the electrolyzer and fuel cell acquisition costs,
respectively.
We denote by FC(kWhoutput/kgH2) the amount of electrical energy
output for each kg of H2consumed in the fuel
cell. We assume that FC = 1/(AFC +BFC).
AFC and BFC are coefficients of the fuel cell consumption
equation, ConsFC (kgH2/h); they can be modeled
similarly to the ones in a Diesel (or oil) generator consumption
equation:
ConsFC=BFCPN_FC +AFCP (6)
where P(kW) is the power supplied by the fuel cell at a certain
time, PN_FC(kW) is the nominal power of the
fuel cell, andAFCandBFC(kgH2/kWh) are the coefficients of the
consumption curve.
The value of the FCexpression is only valid at the fuel cell
nominal power. Nevertheless, since BFC is approx. 0
for fuel cells, the error is minimal.
We have not included the H2tank costs, since we have considered
both the lifetime and the O&M costs as fixed,
therefore, they do not depend on the performance of the
electrolyzer and the fuel cell.
3.2.3 Charge power limit
Fig. 3 depicts the cost of cycling energy () of the batteries
and the electrolyzers as a function of the spare
energy Pcharge. It can be observed that, for low values of
Pcharge,it is optimal to use the spare energy produced by
the renewable sources to charge the batteries as much as
possible; if there is still more energy, then the spare
energy can also produce hydrogen in the electrolyzer.
This phenomenon takes place up to a certain power, Plim_charge,
from which it is cheaper to cycle through the
electrolyzer and the fuel cell. This power is obtained from
equating Ccycling_batto Ccycling_Elyz-FC:
Elyz FCO&M_Elyz O&M_FC
Elyz FC
lim_chargebat Elyz FC
N bat_p DC cycles_eq global_bat
1000
+ + +
=
C CC C
Life LifeP
C
C N U N
(7)
BatteriesCost ofcyclingenergy()
P(kW)Plim_Charge
Electrolyzer-Fuel Cell
Fig. 3. Cost of cycling energy
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
9/24
9
3.2.4 CHARGE strategy optimization
The strategy to optimize the CHARGE process is as follows:
1) If PchargePlim_chargethen the batteries are charged as much
as possible, and, if there is still spare energy,
it is used to produce H2in the electrolyzer.
2) If Pcharge> Plim_chargethen the hydrogen is produced in
the electrolyzer at full power, and, if there is still
spare energy, it is used to charge the batteries.
If the electrolyzer has a minimum power, Pmin_Elyz, then
Plim_charge= max(Plim_charge,Pmin_Elyz).
In the calculation of Plim_chargeit is necessary to take into
account:
Although we have already included the proportional replacement
cost of the elements in theCcycling_batand
Ccycling_Elyz_FC expressions, the lifetime of the system is not
necessarily a multiple of the lifetime of the
components, therefore changing the real value of
Plim_charge.
Ccycling_bat depends on the number of equivalent cycles. If the
batteries lifetime is modeled using the
Rainflow method, then the calculation is not going to be exact,
since it is not possible to know beforehand
the cycled energy through the year.
The expression FC = 1/(AFC +BFC) is only valid at the fuel cell
nominal power.
These inaccuracies can cause the value of Plim_charge not to be
optimal. The program searches for the optimal
value of Plim_charge, named Plim_charge opt, which ranges
between 0 and 2Plim_charge.
3.3 DISCHARGE process
In the case of lack of energy during 1 hour (Pdischarge> 0),
the energy is obtained either from the batteries or fromthe AC
generator, or from the fuel cell. The selection of the element
supplying that energy depends on the
associated costs, described as follows.
3.3.1 Cost of supplying energy with the batteries
The average cost of supplying a certain P (kW) power with the
batteries for 1 hour can be calculated, in ,
through the equation:
bat
N bat_p DC cycles_eq global_bat
P_bat
inv DC DC
1000
(1 )
= +
P C
C N U N C
Factor Factor
(8)
where FactorDCis the average annual value of the hourly ratio of
the DC consumption vs. total consumption:
36524load_DC
DC
1 load_DC load_AC
136524
=
=+
i i
i
i
PFactor
P P (9)
FactorDCexpresses the average value of the energy demanded by
the DC loads weighted by the overall demand.
It is necessary to quantify this value because the batteries,
when supplying DC power do not show external
losses, whereas, when supplying the AC power, it is necessary to
consider the inverter losses.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
10/24
10
Notice that, although the inverter efficiency is variable, it is
necessary to use its average value to obtain the costs
of supplying the energy and the values of P1and P2(defined
later). Hence, invis the efficiency of the inverter
for the average AC load (apparent power), SAC_average,
where:
36524
load_ACAC_average
1
/ cos 36524=
= i
i
PS (10)
3.3.2 Cost of supplying energy with the AC generator
The average cost of supplying a certain P(kW) power with the AC
generator for 1 hour is, in :
gen fuelP_gen O&M_gen N_gen fuel
gen AC/DC DC DC
fuelfixed_gen
AC/DC DC DC
Pr
(1 )
(1 )
C A PC C B P Pr
Life Factor Factor
A Pr PC
Factor Factor
= + + + =+
= ++
(11)
where Prfuel is the fuel price (/l), A and B and are the
coefficients of the consumption curve (l/kWh) [27],
CO&M_genis the O&M cost of the generator (/h), Cgenis
the acquisition cost of the AC generator (),Lifegenis the
estimated lifetime of the AC generator (h) and Cfixed_gen() is
the operating fixed cost of the Diesel generator.
3.3.3 Cost of supplying energy with the fuel cell
The average cost of supplying power with a fuel cell depends on
whether it is fed by the H2produced by the
electrolyzer, and stored in the tank, or it is fed by externally
purchased H2.
If the fuel cell uses the H2previously produced by the
electrolyzer, then the cost is fixed.
FCP_FC O&M_FC fixed_FC
FC
= + =C
C C CLife
(12)
If the fuel cell uses externally purchased H2(in this case there
is no electrolyzer in the hybrid system), then
the cost depends on the power:
FC H2P_FC fixed_FC FC N_FC H2
inv DC DC
(1 )= + +
+
A P PrC C B P Pr
Factor Factor (13)
where PrH2(/kg) is the cost of the externally purchased
hydrogen.
3.3.4 DISCHARGE optimization
Fig. 4 shows the cost of supplying energy as a function of the
power.
It is observed that, for powers between 0 and a certain value
P1, the batteries are the optimal components needed
to supply the power, since they have zero cost at P = 0. It may
also be possible that there exists a value of P1
from which it is more economical to supply the power with
another component (the AC generator or the fuel
cell). This value of P1is the minimum of the two values
resulting from the intersection of the cost function of
supplying energy with batteries and the cost function of
supplying energy with other components AC generator
and fuel cell (see Fig. 4).
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
11/24
11
Cost()
Fuel Cell
Fuel Cell
BatteriesAC Generator
AC GeneratorBatteries
Cost()
Pdischarge Pdischarge
B) FUEL CELL CONSUMING EXTERNAL H2
P1= P1genP2P2 P1= P1gen
P1FC P1FC
A) FUEL CELL CONSUMING H2FROM ELECTROLYZER
Fig. 4. Cost of supplying energy in the DISCHARGE process
We denote by P1gento the power at which CP_bat=
CP_gen(intersection point of the cost of supplying energy with
the batteries and the cost of supplying energy with the AC
generator), and by P1FCto the power at which CP_bat=
CP_FC (intersection point of the cost of supplying energy with
the batteries and the cost of supplying energy with
the fuel cell).
If the value of P1gen is negative (intersection in the third
quadrant), this implies that it is always cheaper to supply
energy with the batteries instead of with the generator. In this
case, we make P1gen= , instead of choosing a
negative value, in order to select a coherent value of P1when we
make that P1= min (P1gen, P1FC). In the case
of P1FCbeing negative, then we also make P1FC= .
It may be possible that both P1gen and P1FChave negative values,
then P1gen= P1FC= , and the transfer of
energy from the batteries is always more economical.
The value of P1is the minimum between P1genand P1FC.
It may be also possible that a value P2exists at which the
energy produced by the component supplying power
starting from P1is not the cheapest. This value of P2is obtained
by making CP_FC= CP_gen. Meaning that, if P1 =
P1gen, and P2has a non-infinite positive value for which CP_FC=
CP_gen, then, if Pdischargeis higher than P2,it is
cheaper to supply with the fuel cell instead of using the AC
generator.
Consequently, the strategy that optimizes the DISCHARGE process
is described as follows:
1) If Pdischarge< P1then the energy is supplied by the
batteries
2) If P1PdischargeP2then the energy is supplied by the component
with the lowest value of P1(either
the AC generator or the fuel cell).
3) If Pdischarge> P2then the energy is provided by the
component with the highest value of P1(either the
AC generator or the fuel cell).
4) Once the component to supply the required energy, Pdischarge,
is selected, we have to consider whether it
is able to provide all the energy needed; if not, the remaining
power, named Prest, is provided by the
component that can produce it at the lowest possible cost.
5) If the second component necessary to supply the energy is not
available, then the third one is used to
supply the remaining energy.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
12/24
12
Note that, when the components supply energy, they also take
into account the values of Pmin_gen, Pmin_FC,
SOCmin, Pcritical_gen, SOCstp_gen, Pcritical_FC,
SOCstp_FCandH2TANKstpas defined in sections 2.1 to 2.4.
If P2< P1, steps 2 and 3 become just one step: For powers
where P1Pdischarge, the energy is provided by the
component with the lowest value of P1(either the AC generator or
the fuel cell).
3.3.5 P1 calculation
P1genis obtained by factoring out Pfrom the CP_bat=
CP_genequation:
fixed_gen
gen
bat
N bat_p DC cycles_eq global_bat fuel
inv DC DC AC/DC DC DC
1000
(1 ) (1 )
=
+ +
CP1
C
C N U N A Pr
Factor Factor Factor Factor
(14)
P1FCis obtained by factoring out Pfrom the CP_bat=
CP_FCequation:
- If the fuel cell consumes H2previously produced by the
electrolyzer:
[ ]fixed_FC inv DC DCFC
bat
N bat_p DC cycles_eq global_bat
(1 )
1000
+=
C Factor Factor P1
C
C N U N
(15)
- If the fuel cell consumes externally purchased H2(there is no
electrolyzer in the system):
( )[ ]fixed_FC FC N_FC H2 inv DC DCFC bat
FC H2
N bat_p DC cycles_eq global_bat
(1 )
1000
+ +
=
C B P Pr Factor Factor
P1 C A PrC N U N
(16)
P1= min (P1gen, P1FC) (17)
3.3.6 P2 calculation
We obtain it from equating CP_gen= CP_FC.
- If the fuel cell consumes H2previously produced by the
electrolyzer:
fixed_FC fixed_gen AC/DC DC DC
fuel
( ) (1 )
+ =
C C Factor Factor
P2 A Pr
(18)
- If the fuel cell consumes externally purchased H2 (there is no
electrolyzer in the system):
fixed_FC FC N_FC H2 fixed_gen
fuel FC H2
AC/DC DC DC inv DC DC
(1 ) (1 )
+ =
+ +
C B P Pr C P2
A Pr A Pr
Factor Factor Factor Factor
(19)
In the calculation of P1and P2it is necessary to take into
account the same inaccuracies as in the calculation of
Plim_charge(see section 3.2.4); moreover, the inverter
efficiency is variable, so we consider the average power, inv,
in this case.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
13/24
13
These inaccuracies may cause the calculated values of P1gen,
P1FCand P2are not optimal. To take into account
these approximations and inaccuracies, the program searches for
the optimal values of these variables, named
P1gen_opt, P1FC_optand P2opt, which are between 0 and 2 times
the calculated values.
3.3.7 DISCHARGE control strategy examples
Fig. 4 shows the cost functions of the different elements in two
cases. In case A, a fuel cell consumes the
hydrogen previously produced by the electrolyzer and in case B
the fuel cell consumes the hydrogen produced
externally (i.e. purchased, with no electrolyzer in the system).
In both examples, if Pdischarge < P1, then it is better
to supply the energy with the batteries. If the batteries are
not able to supply all the Pdischarge power, then the
remaining power, Prest= Pdischarge Pbat, is provided by the AC
generator if Prest< P2, and, if not, by the fuel cell.
If P1Pdischarge P2, then it is better to supply the energy with
the AC generator. If the generator is not able to
supply all the Pdischargepower, the remaining power, Prest=
Pdischarge Pgen, is provided by the batteries if Prest P2then, it
is better to supply the energy with the fuel cell. If the fuel cell
is not able to supply all the
Pdischargepower, then the remaining power, Prest= Pdischarge
PFC, is supplied by the batteries if Prest< P1gen, and, if
not, by the AC generator.
4. Developed Genetic Algorithm
Genetic Algorithms simulate, through a computer program, the
phenomena of reproduction, selection, crossing
and mutation that can be observed in nature, being able to solve
optimization problems that are difficult to
approach with other techniques. Possible solutions to a
particular problem are considered individuals of a
species. In the design problem presented in this paper the
species are the configuration and control of a
hybrid system. An individual is a combination of the variables
(genes) that we wish to optimize (in our case
the variables, or genes, are the components of the hybrid system
and the variables of the control system
strategy).
An individual can be defined by a vector whose components
represent the parameters of the system using an
integer code. The genetic algorithm searches for possible
designs modifying the integer values of the vectors.
Individuals cross over to give birth to a new offspring in the
next generation. The higher the fitness of the
individual, the higher the probability to cross over is. With
the new generations, the algorithm finds better
individuals whose fitness functions are closer to the optimal
values. Some individuals experiment mutations that
make them change some genes, which can expedite the convergence
of the algorithm to the optimal value.
The size of the population (number of individuals), the number
of generations (iterations), and the crossing and
mutation rates, are parameters of the Genetic Algorithm. The
reader is referred to [5, 28], where the basic
principles of Genetic Algorithms can be found.
In a previous work [23] the characteristics of the developed
Genetic Algorithm are described in detail. In this
section we will show, briefly, the changes and improvements that
have been done.
The design program is made up of two Genetic Algorithms, the
main one and the secondary one, described next.
4.1 Main algorithm
This Genetic Algorithm searches for configurations of PV panels,
wind generators, hydro turbine, batteries, AC
generator, fuel cell, electrolyzer and inverter that minimize
the cost of the system. This is the general case, if all
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
14/24
14
these elements are selected. However, the user can decide
whether the system contains all these elements or only
some of them.
The codification of the variables used by the main algorithm is
done through a vector made up of 11 integers:
| a| b| c| d| e|f | g | h | i | j | k |
where,
ais the number of PV panels in parallel
bis the type of PV panel
cis the number of wind turbines
dis the type of wind turbine
eis the type of hydro turbine
fis the number of batteries in parallel
gis the type of battery
his the type of AC generator
iis the type of fuel cell
jis the type of electrolyzer
kis the type of inverter
Regarding the inverter, it can be forced to supply the maximum
power demanded by the AC load, which is an
option of the design tool. In this case, the inverter selected
will be the one with the lowest power whose output is
higher than the AC load maximum. If this option is not used, the
type of inverter will be a variable to be
optimized, being possible that an inverter whose output is
bigger than the maximum AC consumption is not
needed; in this case, higher powers will be supplied by the AC
generator.
The charge regulator, the battery charger and the H2 tank do not
take part in the combination of components
optimized by the main algorithm. This is so because, for each
possible combination calculated by the main
algorithm, the optimal size of these components is determined
once the secondary algorithm obtains the best
control strategy.
The main algorithm simultaneously uses a population of Nm
vectors, such as the one aforementioned. The
number of generations isNgen_main_max.
The main algorithm obtains the optimal configuration of the
elements minimizing the NPC. The NPCmust be
calculated for each combination, represented by one of
theNmvectors which constitute the population.
The fitness function of the ith combination of the main
algorithm is assigned according to its rank in thepopulation (rank
#1 for the best individual, considering the objective function, and
rank #Nm for the worst
solution):
mMAIN
m
( 1)
[( 1) ]i
j
N ifitness
N j
+ =
+ j = 1..Nm (20)
4.2 Secondary algorithm
The Genetic Algorithm obtains, for each configuration provided
by the main algorithm, the control strategy that
minimizes the NPC. The secondary algorithm is evaluated for each
individual of the main algorithm, trying to
find its best control.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
15/24
15
YES
Evaluation of the control strategy foreach of the Nm vectors of
the mainalgorithm. The secondary algorithmis executedNmtimes.
i=1.Nm
Each of the Nmvectors ofthe main algorithm has itsbest
control.Sort by NPC the Nm
solutions obtained.
Random generation of Nmvectors from the main algorithm
Ngen_main = 1
Ngen_main
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
16/24
16
5. Computational results
A system located in Zaragoza, Spain, has been optimized. As
previously mentioned, the program optimizes both
the configuration of the physical components and their control
strategy. Nevertheless, if there is a system with its
physical components fixed, for example, a real system that is
already installed, the program can optimize the
control strategy. The latter case is the one presented here,
since we are mainly interested in showing the strategy
optimization in this paper.
The system whose control will be optimized is a
PV-Diesel-battery-hydrogen system with AC, DC and H 2
simultaneous load. We believe this is the first time that a
control system with Diesel generator, batteries and fuel
cell is achieved. We have chosen this configuration because
every control variable is considered. Although it is
not very common that a Diesel generator and a fuel cell
co-exist, the acquisition costs, the O&M of the different
elements and the weather variables may make this configuration
optimal in some cases.
The studied system is made up of the following elements:
6,600 WpPV generator:15x4 PV panels of 110 Wpat 12V, with a
total acquisition cost of 48,720 , 25years estimated lifetime, and
an annual O&M cost of 40 /year.
48,000 Wh battery bank: 4x5 batteries of 200 Ah at 12V, with a
total acquisition cost of 22,600 , KiBaM
model (Manwell and McGowan, 1993), estimated lifetime according
to Rainflow, battery cycle life as
shown in Fig. 6, 40% minimum SOC, 80% roundtrip efficiency, and
an annual O&M cost of 50 /year.
5 kVA inverter, an acquisition cost of 3,600 , 10 years expected
lifetime, and a variable efficiency with
an apparent power as shown in Fig. 7.
7 kVA Diesel AC generator, acquisition cost of 3,640 , O&M
cost of 0.2 /h, expected lifetime of 7,000
h, minimum power recommended by the manufacturer of 30% of the
nominal power (2,100 W), gas-oil
cost of 0.8 /l, consumption parameters:A= 0.246 l/kWh,B= 0.08145
l/kWh [27].
1 kW fuel cell, acquisition cost of 4,000 , O&M cost of 0.2
/h, 30,000 h expected lifetime, consumption
parameters:AFC= 0.06 l/kWh,BFC= 0 (FC= 16.66 kWh/kgH2for the
nominal power, corresponding to
50% of the H2Lower Heating Value), 6% minimum power (60W).
0
1000
2000
3000
4000
5000
60007000
8000
9000
10 20 30 40 50 60 70 80 90
DOD(%)
Cycles to Failure
Fig. 6. Battery cycle life (cycles to failure) vs. Depth of
Discharge (DOD)
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
17/24
17
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100Output Power (%)
Efficiency (%)
Fig. 7. Inverter efficiency
1 kW electrolyzer, acquisition cost of 3,200 , O&M cost of
0.2 /h, 30000 h expected lifetime, Eyz=0.02157 kgH2/kWh
(corresponding to 85% of the Higher Heating Value of H2).
0.1 kg H2tank, with an acquisition cost of 150 , O&M cost 10
/year, 25 years expected lifetime.
70A charge regulator, with a cost of 125 , 10 years
lifetime.
Battery charger with a cost of 100 , 10 years lifetime and 90%
efficiency.
The system has a 48V DC voltage and a 230V AC voltage. AC loads
(40.9 kWh in one day), DC loads (a fixed
300 W value, providing a total of 7.2 kWh in one day), and H
2loads (0.05 kg in one day) are present. Fig. 8
presents the hourly distribution of the AC and DC loads, and
Fig. 9 shows the H2loads. Note that we consider
that every day has the same loads.
The total acquisition costs of the different elements of the
system make a total of 86,435 , including assembly
costs of 300 . The electrolyzer and fuel cell costs are lower
than the current ones in Spain, assuming that they
will go down in the near future.
01000
2000
3000
4000
5000
6000
7000
8000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
24Hour
AC+DC Load PV gen. Gen. AC Charge bat.Disch. Bat. Fuel Cell
Electrolyzer Pmin_gen_opt
Energy (Wh)
Fig. 8. Simulation of January 24th
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
18/24
18
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
24
Hour
H2 (kg)
H2load H2tank Electrolyzer
Fuel Cell H2TANKstp_opt
Fig. 9. Simulation of the consumption and H2accumulation for
January 24th
The irradiation in the city of Zaragoza is shown in Table 1. The
effective interest rate considered is 2%. The
maximum unmet load allowed is 0%.
The parameter values, without strategy optimization, recommended
by the manufacturers and also calculated are
as follows: Plim_charge= 1,732 W; P1gen= 4,265 W; P1FC= 699 W;
P2= (i.e. the generator and fuel cell curves
do not intersect); Pmin_gen = 2100 W; SOCmin = 40%;
Pcritical_gen = 0 W, SOCstp_gen = 40%; Pmin_FC = 60 W;
Pcritical_FC= 0 W; SOCstp_FC= 40%,H2TANKstp= 0 kg.
The DISCHARGE parameters are represented in Fig. 10. For these
parameter values calculated without strategy
optimization, the systemNPCwould be 285,575 . The fuel, O&M,
and replacement costs are 199,140 .
Table 1
Average daily irradiation
Month Jan. Feb. Mar. Apr. May June July Aug. Sep. Oct. Nov.
Dec.
Wh/m2 2108 2688 4150 4931 6318 6941 6644 5593 4830 3456 2555
2138
Fuel cell
H2from Electrolyzer.
BatteriesAC Generator
Cost ()
PdischargeP1genP1FC
Fig. 10. DISCHARGE parameters before optimization
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
19/24
19
15000
20000
25000
30000
35000
40000
45000
50000
1 2 3 4 5 6 7 8 9 10 11 121314 1516 1718 19 20 2122 2324
Hour
SOC SOCmax SOCmin_opt SOCstp_gen_opt SOCstp_FC_opt
Energy (Wh)
Fig. 11. Simulation of the battery SOCfor January 24th
Using the main algorithm makes no sense in this case, since the
physical components are fixed. The calculation
of the optimal strategy has been done with the following
parameters of the secondary algorithm: Number of
generations = 30, population = 300,000, crossover rate = 0.7,
and mutation rate = 0.01.
When the strategy optimization is finished, the results obtained
for the control parameters are:
Plim_charge_opt= 2,772 W; P1gen_opt= 1,279 W; P1FC_opt= 1,118 W;
P2opt= 1,365; Pmin_gen_opt= 4550 W (65% of the
nominal power); SOCmin_opt = 40%; Pcritical_gen_opt = 2730 W,
SOCstp_gen_opt = 82%; Pmin_FC_opt = 1000 W;
Pcritical_FC_opt= 455 W; SOCstp_FC_opt= 94%,H2TANKstp_opt= 0.093
kg.
The system NPC for the optimized control strategy is 254,521 ,
this being the minimum value found by the
program. The operation, fuel and replacement costs are 168,086
.
It can be observed that the optimization of the control
variables by Genetic Algorithms has allowed us to find the
configuration with the minimalNPC.
Fig. 8, 9 and 11 show the simulation results for one particular
day, January 24 th.
The number of cases evaluated is 9106, with a simulation time of
27h 46 (90 cases per second). Considering
that there are 12 control variables, and that each variable can
have 10 different values (10% precision), the total
number of possible cases is 1012, taking a time of 352.3 years
to solve if the cases are evaluated using an
enumerative technique (without using Genetic Algorithms).
6. Conclusions
We have developed a novel control strategy, optimized through
Genetic Algorithms, for the control of stand-
alone renewable energy hybrid systems with hydrogen storage. The
energy sources of the hybrid system can be
of the renewable type (wind, PV, hydro), as well as AC
generators and fuel cells. The loads can be AC, DC
and/or H2.
The strategy proposed optimizes the control of the hybrid
system, obtaining values of different variables that
make the total Net Present Cost of the system minimal.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
20/24
20
We have explained the control strategy in detail, and we have
also illustrated it with a representative example
using a PV-Diesel-batteries-hydrogen system, where the need to
optimize the different control parameters to get
the lowestNPCpossible can be seen. Genetic Algorithms perfectly
fulfill this mission.
Acknowledgment
This work has been supported by IBERCAJA and the University of
Zaragoza under the program Proyectos de
Investigacin IBERCAJA. Research Project: IBE2005-TEC-04.
References
[1] Muselli M, Notton G, Louche A. Design of hybrid-photovoltaic
power generator, with optimization of
energy management. Sol Energy 1999;65(3):143-57.
[2] Ulleberg . The importance of control strategies in
PV-hydrogen systems. Sol Energy 2004;76(1-3):323-9.
[3] Seeling-Hochmuth GC. A combined optimisation concept for the
design and operation strategy of hybrid-
PV energy systems. Sol Energy 1997;61(2):77-87.
[4] Michalewicz Z, Fogel DB. How to solve it: modern heuristics,
2nd ed. Berlin: Springer; 2004.
[5] Goldberg DE. Genetic algorithms in search, optimization and
machine learning. New York: Addison-
Wesley; 1989.
[6] Barley CD, Winn CB, Flowers L, Green HJ. Optimal control of
remote hybrid power systems, Part I:
simplified model. In: Proceedings of wind power 95, Washington
DC; 1995.
[7] Hybrid Optimization Model for Electric Renewables (HOMER).
Website:
www.nrel.gov/international/homer.
[8] Ulleberg . Stand-alone power systems for the future: optimal
design, operation & control of solar-
hydrogen energy systems. PhD. Norwegian University of Science
and Technology, Trondheim: Department
of Thermal Energy and Hydropower; 1998.
[9] Fiscal A, Thornton J, Klein SA, Beckman WA. Developments to
the TRNSYS simulation program. Journal
of Solar Energy Engineering 1995;117:123-7.
[10] Manwell J, Rogers A, Hayman G, Avelar C, McGowan J.
Hybrid2a hybrid system simulation model:
theory manual, available at:
http://www.ecs.umass.edu/mie/labs/rerl/hy2/.
[11] Mills A., Al-Hallaj S. Simulation of hydrogen-based hybrid
Systems using Hybrid2. International Journal
of Hydrogen Energy 2004;29(10):991-9.
[12] Dienhart H, Siegel A. Hydrogen storage in isolated
electrical energy systems with photovoltaic and wind
energy. International Journal of Hydrogen Energy
1994;19(1):61-6.
[13] Kauranen PS, Lund PD, Vanhanen JP. Development of a
self-sufficient solar-hydrogen energy system.
International Journal of Hydrogen Energy 1994;19(1):99-106.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
21/24
21
[14] Hollumer P, Joubert JM, Lachal B, Yvon K. Evaluation of a 5
kWp photovoltaic hydrogen production and
storage installation for a residential home in Switzerland.
International Journal of Hydrogen Energy
2000;25(2):97-109.
[15] Agbossou K, Kolhe M, Hamelin J. Performance of a
stand-alone renewable energy system based on energy
storage as hydrogen. IEEE Trans on Energy Conversion
2004;19(3):633-40.
[16] Santarelli M, Cal M, Macagno S. Design and analysis of
stand-alone hydrogen energy systems with
different renewable sources. International Journal of Hydrogen
Energy 2004;29(15):1571-86.
[17] Shakyaa BD, Aye L, Musgrave P. Technical feasibility and
financial analysis of hybrid windphotovoltaic
system with hydrogen storage for Cooma. International Journal of
Hydrogen Energy 2005;30(1):9-20.
[18] Cotrell J, Pratt W. Modeling the feasibility of using fuel
cells and hydrogen internal combustion engines in
remote renewable energy systems. In: Proceedings of wind power
03, Austin, Texas; 2003.
[19] Vosen SR, Keller JO. Hybrid energy storage systems for
stand-alone electric power systems: optimization
of systems performance and cost through control strategies.
International Journal of Hydrogen Energy
1999;24(12):1139-56.
[20] Kolhe M, Agbossou K, Kelouwani S, Anouar A, Fournier M,
Hamelin J, Bose TK. Long-term performance
of stand-alone renewable energy system for hydrogen production.
In: Proceedings of 14 thWorld Hydrogen
Energy Conference, Montreal, QC, Canada; 2002.
[21] Nelson DB, Nehrir MH, Wang C. Unit sizing and cost analysis
of stand-alone hybrid wind/PV/fuel cell
power generation systems. Renewable Energy, in press,
doi:10.1016/j.renene.2005.08.031.
[22] Garcia RS, Weisser D. A winddiesel system with hydrogen
storage: Joint optimisation of design and
dispatch. Renewable Energy, in press,
doi:10.1016/j.renene.2005.11.003.
[23] Dufo-Lpez R., Bernal-Agustn JL. Design and control
strategies of PV-Diesel systems using genetic
algorithms. Sol Energy 2005;79(1): 33-46.
[24] Downing SA, Socie DF. Simple rainflow counting algorithms.
International Journal of Fatigue
1982;4(1):31-40.
[25] Manwell JF, McGowan JG. A lead acid battery storage model
for hybrid energy systems. Sol Energy
1993;50(5):399- 405.
[26] Schuhmacher J. INSEL Interactive simulation of renewable
electrical energy supply systems, reference
manual, University of Oldenburg, Renewable Energy Group, Dept.
of Physics, PO Box 2503, D-26111
Oldenburg.
[27] Skarstein O, Ulhen K. Design Considerations with respect to
long-term diesel saving in wind/diesel plants.
Wind Engineering 1989;13(2):72-87.
[28] Bck T, Fogel DB, Michalewicz Z. Evolutionary computation 1:
basic algorithms and operators. Bristol
and Philadelphia: Institute of Physics Publishing; 2000.
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
22/24
22
List of Symbols:
a Number of PV panels in parallel
A Coefficient of the AC generator consumption equation
[l/kWh]
AFC Coefficient of the fuel cell consumption equation
[kgH2/kWh]
b Type of PV panel
B Coefficient of the AC generator consumption equation
[l/kWh]
BFC Coefficient of the fuel cell consumption equation
[kgH2/kWh]
c Number of wind turbines
Cbat Battery bank acquisition cost []
CElyz Acquisition cost of the electrolyzer []
Ccycling_bat Cost of cycling the energy corresponding to a power
P(kW) through the batteries during 1 hour []
Ccycling_Elyz-FC Cost of cycling the energy corresponding to a
power P (kW) through the electrolyzer and the fuel cell
during 1 hour []
CFC Acquisition cost of the fuel cell []
Cfixed_gen Operating fixed cost of the Diesel generator []CN
Nominal capacity of the battery [Ah]
ConsFC Consumption of the fuel cell [kgH2/h]
cos Power factor of the AC loads
CO&M_Elyz Operation and maintenance cost of the electrolyzer
[/h]
CO&M_FC Operation and maintenance cost of the fuel cell
[/h]
CO&M_gen Operation and maintenance cost of the AC generator
[/h]
CP_FC Average cost of supplying a certain P(kW) power with the
fuel cell for 1 hour []
CP_gen Average cost of supplying a certain P(kW) power with the
AC generator for 1 hour []
d Type of wind turbine
DOD Depth of discharge of the battery [% of CN]
e Type of hydro turbine
f Number of batteries in parallel
FactorDC Average annual value of the hourly ratio of the DC
consumption vs. total consumption
fitnessmain_i Fitness of the ith combination of the main
algorithm
fitnesssec_i Fitness of the ith combination of the secondary
algorithm
g Type of battery
h Type of AC generator
H2_rest H2load (for external consumption) that cannot be
initially met by the H2stored in the tank [kg]
H2TANKstp Setpoint for the amount of H2stored in the tank
[kg]H2TANKstp_opt Setpoint for the amount of H2stored in the tank,
value optimized by the program [kg]
i Type of fuel cell
j Type of electrolyzer
k Type of inverter
kgH2 kilograms of hydrogen
LifeElyz Electrolyzer lifetime [h]
LifeFC Fuel cell lifetime [h]
Lifegen AC generator lifetime [h]
Nbat_p Number of batteries in parallel
Ncycles_eq Average of a battery lifetime in equivalent full
cycles
Ngen_main_max Number of generations of the main algorithm
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
23/24
23
Ngen_sec_max Number of generations of the secondary
algorithm
Nm Population of the main algorithm
Nsec Population of the secondary algorithm
NPC Total Net Present Cost of the system (investment costs plus
the discounted present values of all future costs
during the lifetime of the system) []
Pcharge Total converted spare power produced by renewable
sources on the DC side (spare DC power plus spare
AC power multiplied by the AC/DC converter efficiency) [W]
Pcritical_FC Fuel cell critical power limit. When the demanded
power is lower than this value, the fuel cell works at
nominal power, using the extra power to charge the batteries up
to the SOCstp_FC_opt [W]
Pcritical_FC_opt Fuel cell critical power limit, value optimized
by the program [W]
Pcritical_gen AC generator critical power limit. When the
demanded power is lower than this value, the AC generator
works at nominal power, using the extra power to charge the
batteries up to the SOCstp_gen_opt state or to
produce H2in the electrolyzer up to theH2TANKstp_opttank level
[W]
Pcritical_gen_opt AC generator critical power limit, value
optimized by the program [W]
Pdemand Power that must be supplied by the AC generator (or by
the fuel cell) [W]Pdischarge Load not met by the renewable sources
[W]
PFC Power supplied by the fuel cell [W]
Pgen Power supplied by the AC generator [W]
PH2_rest_conv_DC DC Power consumed by the electrolyzer to supply
the hydrogen load (for external consumption) that cannot
be initially met by the H2stored in the tank (H2_rest) [W]
Pinv_max Maximum active power that can be produced by the
inverter [W]
Pload_AC Power consumed by the loads in the AC bus [W]
Pload_DC Power consumed by the loads in the DC bus (including
PH2_rest_ conv_DC) [W]
Plim_charge Power below which it is more economical to store
energy in the batteries than in the H2tank [W]
Plim_charge_opt Power below which it is more economical to store
energy in the batteries than in the H2 tank, value
optimized by the program [W]
Pmax_load Maximum value of the hourly power consumed by the
demand [W]
Pmin_Elyz Electrolyzer minimum power [W]
Pmin_FC Minimum power of the fuel cell recommended by the
manufacturer [W]
Pmin_FC_opt Minimum power of the fuel cell optimized by the
program [W]
Pmin_gen Minimum power of the AC generator recommended by the
manufacturer [W]
Pmin_gen_opt Minimum power of the AC generator optimized by the
program [W]
PN_FC Fuel cell nominal power [W]
PN_gen AC generator nominal power [W]
Prest Remaining power than cannot be supplied by either the
batteries or the AC generator or the fuel cell [W]
Pre_AC Power produced by the renewable sources that are in the
AC bus [W]
Pre_DC Power produced by the renewable sources that are in the
DC bus [W]
Prfuel Fuel price for the AC generator [/l]
PrH2 Hydrogen price (if it is externally purchased) [/kg]
Pspare Difference between the nominal power of the AC generator
and the total power demanded by the load [W]
P1 Minimum value between P1genand P1FC[W]
P1FC Intersection point of the cost of supplying energy with the
batteries and the cost of supplying energy with
the fuel cell [W]
P1FC_opt P1FCvalue optimized by the program [W]
-
8/13/2019 Optimization of Control Strategies VERSI - (Jos_351
Luis)
24/24
P1gen Intersection point of the cost of supplying energy with
the batteries and the cost of supplying energy with
the AC generator [W]
P1gen_opt P1genoptimized by the program [W]
P2 Intersection point of the cost of supplying energy with the
fuel cell and the cost of supplying energy with
the AC generator [W]
P2opt P2optimized by the program [W]
SOC State of Charge of the battery, defined here as a percentage
of the nominal capacity of the battery [% of CN]
SOCmax Maximum State of Charge of the battery [100 % of CN]
SOCmin Minimum State of Charge of the battery recommended by the
manufacturer [% of CN]
SOCmin_opt Minimum State of Charge of the battery optimized by
the program [% of CN]
SOCstp_FC Batteries SOC setpoint for the fuel cell [% of CN]
SOCstp_FC_opt Batteries SOC setpoint for the fuel cell, value
optimized by the program [% of CN]
SOCstp_gen Batteries SOC setpoint for the AC generator [% of
CN]
SOCstp_gen_opt Batteries SOC setpoint for the AC generator,
value optimized by the program [% of CN]
S Apparent power at the inverter output [VA]SAC_average Average
AC load (apparent power) [VA]
Sinv Nominal apparent power of the inverter [VA]
UAC AC bus voltage [V]
UDC DC bus voltage [V]
AC/DC Efficiency of the battery charger (AC/DC converter)
Elyz Amount of H2produced for each kWh of electrical energy
consumed in the electrolyzer [kgH2/kWhinput].
FC Amount of electrical energy output for each kg of H2consumed
in the fuel cell [kWhoutput/kgH2]
global_bat Overall efficiency of the batteries (roundtrip
efficiency)
inv Inverter efficiency for the average AC load
(SAC_average)
inv (S) Inverter efficiency
inv(Sinv) Efficiency of the inverter at its apparent nominal
power