Embed Size (px)
Citation preview

Research ArticleOptimalCooperativeBrakeDistributionStrategy for IWMVehicleAccounting for Electric and Friction Braking Torques
Michele Vignati Mattia Belloni Davide Tarsitano and Edoardo Sabbioni
Department of Mechanical Engineering Politecnico di Milano via La Masa 1 Milan 20156 Italy
Correspondence should be addressed to Michele Vignati michelevignatipolimiit
Received 19 May 2021 Revised 24 June 2021 Accepted 29 June 2021 Published 10 July 2021
Academic Editor Xiaodong Sun
Copyright copy 2021 Michele Vignati et al is is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
Electric vehicles are spreading in automotive industry pushed by the need of reducing greenhouse gas However the use ofmultiple electric motors ie one per wheel allows to redefine the vehicle powertrain layout with great benefits on vehicledynamics Electric motors braking torque is in general not enough to produce high decelerations Hydraulic friction brakes arestill necessary for safety reasons and to avoid oversized motors is paper presents a control strategy for distributed electricmotors (EM) one per wheel to maximize the regenerative braking e controller handles cooperative braking among EMs andhydraulic brakes which are still necessary to guarantee top braking performance of the car e proposed algorithm considers thedriver requested braking torque as well as the required yaw moment by stability control system Motor efficiency map and wheelnormal load are considered to optimally distribute the torques With respect to conventional distribution strategies the presentedalgorithm improves performance maximizing the regenerative braking power
1 Introduction
In recent years the interest towards electric vehicles (EVs)leads to the possibility of reinventing several vehicle sub-systems for both light and heavy-duty vehicles [1] inparticular the powertrain e use of multiple electricmotors (EMs) one per wheel allows to precisely control thetorque at each wheel showing superior performance withrespect to a traditional internal combustion engine (ICE)vehicle [2] In addition EMs can deliver also braking tor-ques thus recovering some of the vehicle kinetic energy ieregenerative braking used to recharge the vehicle battery [3]In-Wheel Motors (IWM) are one smart solution [2] forhaving distributed electric motors (DEMs) Furthermorethe demand of extremely reliable motors and the cost re-duction pushes the research to find innovative solution forcontrolling Permanent Magnets EMs with powerful sen-sorless solutions ([4ndash7])
Another interesting feature offered by DEMs is thepossibility of easily applying Torque Vectoring (TV) toimprove the stability and performance of the car ([8ndash11])Furthermore antilock braking systems (ABS) can benefit
from EMs higher promptness even when compared tohydraulic actuated mechanical brakes thus reducing the carstopping distance ([2 3]) Despite the fact that DEMs so-lutions appearing in the market have extremely high per-formances considering the maximum delivered torque andpower the maximum braking torque is not enough to brakethe car at high deceleration values It is thus necessary to useconventional friction brakes in cooperation with DEMs anda suitable blended braking control strategy must be adoptedSeveral parameters have to be accounted for when dealingwith it like wheel peripheral speeds motor efficiency loadtransfers battery Status of Charge (SOC) etc Furthermorethe total braking torque required by driver and the yawmoment required by TV must be satisfied
When dealing with DEM vehicles considering thetypical control layout ([8 9 11ndash13]) of vehicle dynamicscontrol strategies inside Vehicle Control Unit (VCU) can beschematized as in Figure 1e driver steer command inputsinto vehicle with accelerator and brake pedal inputs areprocessed by VCU to generate total driving and brakingtorque to be demanded in electric motors e VCU alsogenerates a torque vectoring yaw moment to stabilize or
HindawiMathematical Problems in EngineeringVolume 2021 Article ID 1088805 19 pageshttpsdoiorg10115520211088805
improve the performance of the car e total torque andtotal yaw moment must be distributed among the availablemotors and hydraulic brakesis latter aspect is the focus ofthis paper
e resulting problem is a constrained multi-inputsystem In literature the problem is usually divided in threeparts front-rear axle brake repartition electrical-mechanicalbrake repartition at each wheel and electric powermanagement
In [14] a hybridized vehicle equipped with in-wheelmotors has a braking logic based on a load transfer esti-mation control algorithm On the vehicle with four in-wheel motors in [15] a deep learning optimization algo-rithm finds the braking repartition considering designvariables as the front-rear brake repartition and theelectrical-mechanical torque repartition at each axleAuthors of [16] propose to use the maximum brake torqueavailable at the motor keeping in consideration the wheelperipheral velocity available motor torque consideringmotor saturation and the battery SOC In [17] authorssuggest using a fixed front-rear brake repartition thatfavors the braking on the front axle using as much motortorque as the motor can provide (maximum motor torquelimitation) Also in [18] authors suggest using optimalfront-rear repartition curve but a fuzzy logic controllerbased on torque variation rate and battery SOC allocatesmechanical and electrical torque at each wheel An optimalcontrol strategy is proposed by Xu et al [12] it is based onMPC that minimizes a cost functional that involves theoptimal front-rear force repartition the driver torquedemand the EM efficiency and the efficiency of the brakesystem Paper [19] proposes an electronically controlledbraking system for EV and HEV which integrates re-generative braking automatic control of the braking forceson front and rear wheels and wheels antilock functiontogether e front-rear torque is allocated exploiting themaximum longitudinal force transmissible and the elec-tric motors provide the torque until the limit is reachedleaving to the friction brakes the role to provide theremaining amount of torque required Similarly authorsof [20] develop a brake system for an automatic trans-mission based HEV which is handled by a regenerativebraking cooperative control algorithm that exploits theavailable motor torque characteristic Gang and Zhi [21]propose an energy saving control strategy based on motorefficiency map for electric vehicles with four-wheel
independently driven in-wheel motors e four-wheeldrive torque is online optimized in real time through driveenergy saving control to improve the driving efficiency inthe driving process of electric vehicles [22] proposes aregenerative braking distribution strategy based on multi-input fuzzy control logic while considering the batterySOC the brake strength and the motor speed
All the above-mentioned approaches focus on a singleaspect of the braking maneuver ideal braking repartitionmotor efficiency e obtained solutions based on optimalcontrol theory must be evaluated minimizing the costfunctional on a prefixed drive cycle on the other hand anonline problem evaluation requires big computationaleffort Reported papers concentrate on pure braking ma-neuvers in which longitudinal load transfer is consideredHowever the lateral load transfer in cornering is notconsidered Also yawing moment request by TV stabilitycontrol is not considered e resulting algorithms are thusnot considering the vehicle lateral dynamics and the in-fluence of the braking torque on the car lateral stability[23] proposes an optimized control strategy for IWMvehicle which considers vehicle lateral stability [24]proposes an optimal control distribution strategy for IWMvehicle considering energy efficiency However bothstrategies are intended for EMs only and do not considerblended braking condition
In this paper the proposed strategy distributes the re-quired braking force among four DEMS and the four hy-draulic brakes maximizing the recovered energy Torquedistribution accounts for the total braking torque demandedby the driver and the yaw moment required by TV stabilitycontrol Furthermore the distribution algorithm accountsfor the wheels applicable torque because friction is limitedby the normal load Both longitudinal and lateral loadtransfer are considered to evaluate the wheel condition
e control strategy optimization problem is solvedoffline by generating several lookup tables accounting forseveral vehicle conditions both in straight and in corneringcondition
e paper is thus focused on the optimization of thetorque distribution among electric motors and frictionbrakes and it is organized as follows Firstly the simulationenvironment is presented accounting for complete vehiclemodel driver model and torque vectoring strategyen anoptimal distribution control strategy is presented with de-tails on the design variable and constraints Some tabulatedresults of the offline optimization are presented Finally thepaper shows the simulation results in typical driving ma-neuvers where the proposed controller is compared to twoother strategies normally adopted in commercial cars
2 Simulation Environment
To test the performances of the new braking control algo-rithm a vehicle model developed in a simulation environ-ment in MatlabSimulink is used e vehicle is modelledaccording to a 14 dof model (ViCar Realtime) which isbased on D segment passengersrsquo car e model accounts forthe following
VehicleTorquesdistributor
Driver
Stabilitycontrol
Pedals
Steer Steer
Status
Yawmoment
Wheeltorques
Figure 1 Typical scheme for electric vehicles with multiple electricmotors
2 Mathematical Problems in Engineering
(i) ree displacements of the vehicle center of mass(com)
(ii) ree rotations of the car body (yaw pitch and roll)(iii) Four vertical displacements of unsprung masses(iv) Four wheels angular velocities about hub axis
Some subsystems have been added to the ViCar modelsuch as the electric motors model the friction brake modeldriver model and the TV control logic All the parameters ofthe vehicle such as masses inertias motors dimension andbrakes dimensions have been designed considering commer-cial electric vehicles whose main data are reported in Table 1
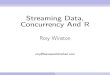
21 Electric Motor Model e reference vehicle is driven byfour in-wheel motors which are modelled from a me-chanical point of view e torque versus speed character-istic for both driving and braking is considered as shown inFigure 2 An equivalent first-order time lag transfer functionwith the same bandwidth of real motors reproduces thedynamics of the motor torque regulator [25]
TE 1
τms + 1TE (1)
where s is the Laplace coordinate TE is the required torqueby the controller while TE is the effective output torque τm
is the time constant of motor plus motor drive In-wheelmotors data are taken from [26] Dimensions of IWM aresuitable for 18Prime wheels which are supported by the con-sidered vehicle
22 Friction Brake Model e friction brakes have beenmodelled from a mechanical point of view As reported inequation (2) the friction torque provided by mechanicalbrakes is proportional to the oil pressure inside the brakecaliper by a constant of proportionality Kb e dynamics ofthe oil pressure at the brake caliper are expressed by a puretime delay T0 combined with a second order transferfunction considering oil pump and circuit dynamics whichin Laplace domain reads
pcal eminus sT0
1T21s
2+ T2s + 1
pcal (2)
where pcal is the pressure at the brake caliper pcal is thepressure required by the control logic s is Laplace coor-dinate and T1 and T2 are the brake system time constants
23 DriverModel Driver model is needed to run close loopmaneuver It is path follower coupled with a cruise control tofollow reference speed [10] e path follower is a pro-portional controller based on distance error and headingerror (see Figure 3)
δ 2l
L2 dKpdWd + hKphWh (3)
e first part of the equation refers to distance error andthe second part refers to heading error Kpd and Wd are
respectively the proportional gain and the weight related tothe distance error (d cos ψ[Yref minus (YG + L sin ψ)] minus sinψ[Xref minus (XG + L cos ψ)]) h is the heading error and Kph
and Wh are the proportional gain and the weight related tothe heading error (h ψref minus ψ) L is the forward previewdistance that reproduces driver capability in anticipating itsinputs according to road shape in front of the car
24 TV Control Logic Torque vectoring control strategy istaken from literature ([27]) not being the focus of thepresent paper It generates a yaw moment MZreq thatstabilizes the vehicle and improves its performances bytracking yaw rate and sideslip angle references It is basedon a proportional controller on the vehicle yaw rate _ψ andvehicle sideslip angle β
MZreq Kp _ψ _ψref minus _ψ( 1113857 + Kpβ βref minus β( 1113857 (4)
Kpβ and Kp _ψ are the proportional gain on yaw moment andvehicle sideslip angle respectively Referring to Figure 3 thereference value of _ψref and βref can be calculated from thesingle-track model as
_ψref Vδ
L 1 + KUrefV2
1113872 1113873
βref _ψreflR
Vminus
mlF
LKTR
1113888 1113889
⎧⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎩
(5)
where KUref (ml2)((lRKTF) minus (lFKTR)) is the desiredundersteer coefficient
3 Torque Distribution Algorithm
31 Preliminary Considerations rough the advantages ofhaving four independently wheels driven vehicle there is thepossibility to control independently the torque at eachwheel is powertrain layout leads the possibility to have anonsymmetric torque distribution around the vehicleallowing torque vectoring Depending on the driving situ-ation it is possible to have different performance objectivesin case of panic braking for example the driver requires thevehicle to stop in the smallest space possible without losingthe vehicle stability and maneuverability In a commercialpassenger car in normal driving conditions (not panicbraking so for deceleration rates below 6ms2 on dry as-phalt) the main objective during braking phase is to recover
Table 1 Main vehicle parameters
Symbol Parameter Value Unitm Vehicle mass 1947 kgJz Yaw moment of inertia 25598 kg m2
l Wheelbase 2875 mlf Com to front axle distance 1380 mlr Com to rear axle distance 1495 mhG Com height from ground 0660 mcf Front track width 1497 mcr Rear track width 1495 m
Mathematical Problems in Engineering 3
the vehicle kinetic energy as much as possible guaranteeinganyway the driver requests in terms of longitudinal decel-eration and having the possibility to control independentlythe torque on the left and right side of the vehicle the yawmoment required by the TV control logic Having thepossibility to provide the braking torque at each wheelexploiting the friction brake and the DEM the torquedistribution problem has been solved with a mathematicaloptimum-search approache problem design variables areeight and correspond to the four friction torques and thefour electric torques (ie one at each wheel) the objectivefunction considers the DEMs efficiency map and corre-sponds to the regenerated power for each dynamic condi-tion and the additional optimum problem constraintsconsider the vehicle dynamics driver requirements andphysical limits of the vehicle components
Figure 4 shows the braking algorithm functional blockscheme e brake pedal position generates a total brakingtorque request for the controller e required torque istranslated in a brake input considering the possibility ofusing the electric motors and mechanical brakes based onvehicle dynamics and vehicle energy storage system statusIn case of panic braking or low wheel-road friction coeffi-cient a wheel can lock causing vehicle instability andor lossof steerability To avoid wheel locking the torque at thiswheel can be controlled differently not considering asprimary goal the energy regeneration but the passengerssafety So at any request of braking torque by the driver if awheel is slipping the torque at that wheel can be controlledusing an antilock braking algorithm [3]
Figure 5 represents the scheme of vehicle power fluxDuring braking maneuver (red arrows) the kinetic energy ofthe vehicle is transformed by electric motors in electric energythat is delivered to battery storage system During acceleratingmaneuvers (green arrows) the energy stored in the battery isdelivered to the wheels passing through inverters and then it istransformed in kinetic energy Considering that electric motorsand the energy storage system are usually designed for vehicletraction phase the most critical condition occurs duringbraking maneuver where required acceleration performancesare higher in traction condition for safety reasone power tobe dissipated when braking is in general much larger than theone required in drivinge battery capacity rate (Crate) and theState of Charge (SOC) are two important parameters to definethe battery capability in accepting the input power when re-generative braking is considered Yaici et al [28] review dif-ferent recent application of various batterysupercapacitor
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
Mot
or p
ower
[kW
]
01
010203040501020304050102030405
02 03
03
04
04
05 06
0507
06
07
0706
07
0808
08 08
07
08
08
07
09
09
09
EfficiencyPeak torqueContinous torque
Peak powerPeak power
ndash1000
ndash500
0
500
1000
Mot
or to
rque
[Nm
]
200 400 600 800 14001000 1200 16000Motor speed [rpm]
07
0102030405010203040506
080706
08
Figure 2 IWMmotor curve characteristic e motor curve characteristic refers to ProteanDrive Pd18 in wheel motor by Protean Electrice maximum torque of the motor is function of the motor angular speed
Reference path
d
h
y
FyrFyfvy
vx vf x
vβ
vr
αfαr
δ
ψ
Figure 3 Vehicle single-track model e TV model used in thesesimulations is based on the vehicle single-track model
4 Mathematical Problems in Engineering
hybrid system in EVs and different lithium-ion battery modelsfor automotive applications have been largely treated in lit-erature ([29ndash31]) From these papers thanks to the use of thesupercapacitors and the presence of different energy storagesystems layouts the problem related to the power flux and theCrate seems to be overcome because the energy storage systemscan absorb extremely big amount of power (with respect toHEVPHEV) e bottleneck of the power in regenerationstrategies is now the DEMs ese considerations allow toneglect the impact of the power supply on the braking controlalgorithm and to consider only motor characteristic and ef-ficiency to impact on the torque distribution optimization
32 Design Variables e goal of a regenerative brakingdistribution is to find the correct torque quantity that mustbe provided from each electric motor and from each brakecaliper So the problem design variables are the electric andfriction torques at each wheel
Tij where i E F and j FR FL RR RL (6)
(i) E electric(ii) F friction(iii) FR front right wheel
(iv) FL front left wheel(v) RR rear right wheel(vi) RL rear left wheel
us the total number of considered design variables iseight the four electric torques by DEMS and the four frictiontorques by hydraulic brakes
33 Objective Function e goal of the optimizationproblem is to maximize the power recovered during brakingmaneuver e power recovered is equal to the brakingtorque applied at each wheel (TEj) multiplied by the wheelangular speed (ωj) and the motor efficiency (η(TEjωj))
that again is function of the torque required and wheelangular speed e power that each electric motor can re-generate can be calculated as Pj TEj middot ωj middot η(TEjωj) etorque applied during braking is negative for conventionwhile the wheel angular speed and motor efficiency arealways positive e total energy recovered during brakingmaneuver is equal to the sum of the power coming from eachwheel Maximizing the power recovered at each time instantcorresponds to maximize the total energy regeneratedduring the entire period of the braking maneuver emaximization problem is converted as minimization
Brake pedalTotal torque
required
Total torquerequired
Emergencybraking
Mechanicalbraking
Yes
Yes
No
No
Is a wheel
slidingSOC lt 08
Regenerativebraking
TV controllogic
Total yawmomentrequired
Torque distributionalgorithm
(minimization problem)
Wheels angular velocity
Vehicle lateral acceleration
Road inclination angle
Electrical and frictiontorque at each wheel
Figure 4 Braking algorithm scheme e torque distribution algorithm is represented with a black box scheme to underline the algorithmworking conditions and the logics inputs and outputs
Energy storagesystem Inverters
Electricmotor
Electricmotor
Vehicle speed
Figure 5 Vehicle power fluxese green arrows represent the power fluxes from the batteries to the road during traction phase and the redarrows represent the power fluxes during regenerative braking
Mathematical Problems in Engineering 5
problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

improve the performance of the car e total torque andtotal yaw moment must be distributed among the availablemotors and hydraulic brakesis latter aspect is the focus ofthis paper
e resulting problem is a constrained multi-inputsystem In literature the problem is usually divided in threeparts front-rear axle brake repartition electrical-mechanicalbrake repartition at each wheel and electric powermanagement
In [14] a hybridized vehicle equipped with in-wheelmotors has a braking logic based on a load transfer esti-mation control algorithm On the vehicle with four in-wheel motors in [15] a deep learning optimization algo-rithm finds the braking repartition considering designvariables as the front-rear brake repartition and theelectrical-mechanical torque repartition at each axleAuthors of [16] propose to use the maximum brake torqueavailable at the motor keeping in consideration the wheelperipheral velocity available motor torque consideringmotor saturation and the battery SOC In [17] authorssuggest using a fixed front-rear brake repartition thatfavors the braking on the front axle using as much motortorque as the motor can provide (maximum motor torquelimitation) Also in [18] authors suggest using optimalfront-rear repartition curve but a fuzzy logic controllerbased on torque variation rate and battery SOC allocatesmechanical and electrical torque at each wheel An optimalcontrol strategy is proposed by Xu et al [12] it is based onMPC that minimizes a cost functional that involves theoptimal front-rear force repartition the driver torquedemand the EM efficiency and the efficiency of the brakesystem Paper [19] proposes an electronically controlledbraking system for EV and HEV which integrates re-generative braking automatic control of the braking forceson front and rear wheels and wheels antilock functiontogether e front-rear torque is allocated exploiting themaximum longitudinal force transmissible and the elec-tric motors provide the torque until the limit is reachedleaving to the friction brakes the role to provide theremaining amount of torque required Similarly authorsof [20] develop a brake system for an automatic trans-mission based HEV which is handled by a regenerativebraking cooperative control algorithm that exploits theavailable motor torque characteristic Gang and Zhi [21]propose an energy saving control strategy based on motorefficiency map for electric vehicles with four-wheel
independently driven in-wheel motors e four-wheeldrive torque is online optimized in real time through driveenergy saving control to improve the driving efficiency inthe driving process of electric vehicles [22] proposes aregenerative braking distribution strategy based on multi-input fuzzy control logic while considering the batterySOC the brake strength and the motor speed
All the above-mentioned approaches focus on a singleaspect of the braking maneuver ideal braking repartitionmotor efficiency e obtained solutions based on optimalcontrol theory must be evaluated minimizing the costfunctional on a prefixed drive cycle on the other hand anonline problem evaluation requires big computationaleffort Reported papers concentrate on pure braking ma-neuvers in which longitudinal load transfer is consideredHowever the lateral load transfer in cornering is notconsidered Also yawing moment request by TV stabilitycontrol is not considered e resulting algorithms are thusnot considering the vehicle lateral dynamics and the in-fluence of the braking torque on the car lateral stability[23] proposes an optimized control strategy for IWMvehicle which considers vehicle lateral stability [24]proposes an optimal control distribution strategy for IWMvehicle considering energy efficiency However bothstrategies are intended for EMs only and do not considerblended braking condition
In this paper the proposed strategy distributes the re-quired braking force among four DEMS and the four hy-draulic brakes maximizing the recovered energy Torquedistribution accounts for the total braking torque demandedby the driver and the yaw moment required by TV stabilitycontrol Furthermore the distribution algorithm accountsfor the wheels applicable torque because friction is limitedby the normal load Both longitudinal and lateral loadtransfer are considered to evaluate the wheel condition
e control strategy optimization problem is solvedoffline by generating several lookup tables accounting forseveral vehicle conditions both in straight and in corneringcondition
e paper is thus focused on the optimization of thetorque distribution among electric motors and frictionbrakes and it is organized as follows Firstly the simulationenvironment is presented accounting for complete vehiclemodel driver model and torque vectoring strategyen anoptimal distribution control strategy is presented with de-tails on the design variable and constraints Some tabulatedresults of the offline optimization are presented Finally thepaper shows the simulation results in typical driving ma-neuvers where the proposed controller is compared to twoother strategies normally adopted in commercial cars
2 Simulation Environment
To test the performances of the new braking control algo-rithm a vehicle model developed in a simulation environ-ment in MatlabSimulink is used e vehicle is modelledaccording to a 14 dof model (ViCar Realtime) which isbased on D segment passengersrsquo car e model accounts forthe following
VehicleTorquesdistributor
Driver
Stabilitycontrol
Pedals
Steer Steer
Status
Yawmoment
Wheeltorques
Figure 1 Typical scheme for electric vehicles with multiple electricmotors
2 Mathematical Problems in Engineering
(i) ree displacements of the vehicle center of mass(com)
(ii) ree rotations of the car body (yaw pitch and roll)(iii) Four vertical displacements of unsprung masses(iv) Four wheels angular velocities about hub axis
Some subsystems have been added to the ViCar modelsuch as the electric motors model the friction brake modeldriver model and the TV control logic All the parameters ofthe vehicle such as masses inertias motors dimension andbrakes dimensions have been designed considering commer-cial electric vehicles whose main data are reported in Table 1
21 Electric Motor Model e reference vehicle is driven byfour in-wheel motors which are modelled from a me-chanical point of view e torque versus speed character-istic for both driving and braking is considered as shown inFigure 2 An equivalent first-order time lag transfer functionwith the same bandwidth of real motors reproduces thedynamics of the motor torque regulator [25]
TE 1
τms + 1TE (1)
where s is the Laplace coordinate TE is the required torqueby the controller while TE is the effective output torque τm
is the time constant of motor plus motor drive In-wheelmotors data are taken from [26] Dimensions of IWM aresuitable for 18Prime wheels which are supported by the con-sidered vehicle
22 Friction Brake Model e friction brakes have beenmodelled from a mechanical point of view As reported inequation (2) the friction torque provided by mechanicalbrakes is proportional to the oil pressure inside the brakecaliper by a constant of proportionality Kb e dynamics ofthe oil pressure at the brake caliper are expressed by a puretime delay T0 combined with a second order transferfunction considering oil pump and circuit dynamics whichin Laplace domain reads
pcal eminus sT0
1T21s
2+ T2s + 1
pcal (2)
where pcal is the pressure at the brake caliper pcal is thepressure required by the control logic s is Laplace coor-dinate and T1 and T2 are the brake system time constants
23 DriverModel Driver model is needed to run close loopmaneuver It is path follower coupled with a cruise control tofollow reference speed [10] e path follower is a pro-portional controller based on distance error and headingerror (see Figure 3)
δ 2l
L2 dKpdWd + hKphWh (3)
e first part of the equation refers to distance error andthe second part refers to heading error Kpd and Wd are
respectively the proportional gain and the weight related tothe distance error (d cos ψ[Yref minus (YG + L sin ψ)] minus sinψ[Xref minus (XG + L cos ψ)]) h is the heading error and Kph
and Wh are the proportional gain and the weight related tothe heading error (h ψref minus ψ) L is the forward previewdistance that reproduces driver capability in anticipating itsinputs according to road shape in front of the car
24 TV Control Logic Torque vectoring control strategy istaken from literature ([27]) not being the focus of thepresent paper It generates a yaw moment MZreq thatstabilizes the vehicle and improves its performances bytracking yaw rate and sideslip angle references It is basedon a proportional controller on the vehicle yaw rate _ψ andvehicle sideslip angle β
MZreq Kp _ψ _ψref minus _ψ( 1113857 + Kpβ βref minus β( 1113857 (4)
Kpβ and Kp _ψ are the proportional gain on yaw moment andvehicle sideslip angle respectively Referring to Figure 3 thereference value of _ψref and βref can be calculated from thesingle-track model as
_ψref Vδ
L 1 + KUrefV2
1113872 1113873
βref _ψreflR
Vminus
mlF
LKTR
1113888 1113889
⎧⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎩
(5)
where KUref (ml2)((lRKTF) minus (lFKTR)) is the desiredundersteer coefficient
3 Torque Distribution Algorithm
31 Preliminary Considerations rough the advantages ofhaving four independently wheels driven vehicle there is thepossibility to control independently the torque at eachwheel is powertrain layout leads the possibility to have anonsymmetric torque distribution around the vehicleallowing torque vectoring Depending on the driving situ-ation it is possible to have different performance objectivesin case of panic braking for example the driver requires thevehicle to stop in the smallest space possible without losingthe vehicle stability and maneuverability In a commercialpassenger car in normal driving conditions (not panicbraking so for deceleration rates below 6ms2 on dry as-phalt) the main objective during braking phase is to recover
Table 1 Main vehicle parameters
Symbol Parameter Value Unitm Vehicle mass 1947 kgJz Yaw moment of inertia 25598 kg m2
l Wheelbase 2875 mlf Com to front axle distance 1380 mlr Com to rear axle distance 1495 mhG Com height from ground 0660 mcf Front track width 1497 mcr Rear track width 1495 m
Mathematical Problems in Engineering 3
the vehicle kinetic energy as much as possible guaranteeinganyway the driver requests in terms of longitudinal decel-eration and having the possibility to control independentlythe torque on the left and right side of the vehicle the yawmoment required by the TV control logic Having thepossibility to provide the braking torque at each wheelexploiting the friction brake and the DEM the torquedistribution problem has been solved with a mathematicaloptimum-search approache problem design variables areeight and correspond to the four friction torques and thefour electric torques (ie one at each wheel) the objectivefunction considers the DEMs efficiency map and corre-sponds to the regenerated power for each dynamic condi-tion and the additional optimum problem constraintsconsider the vehicle dynamics driver requirements andphysical limits of the vehicle components
Figure 4 shows the braking algorithm functional blockscheme e brake pedal position generates a total brakingtorque request for the controller e required torque istranslated in a brake input considering the possibility ofusing the electric motors and mechanical brakes based onvehicle dynamics and vehicle energy storage system statusIn case of panic braking or low wheel-road friction coeffi-cient a wheel can lock causing vehicle instability andor lossof steerability To avoid wheel locking the torque at thiswheel can be controlled differently not considering asprimary goal the energy regeneration but the passengerssafety So at any request of braking torque by the driver if awheel is slipping the torque at that wheel can be controlledusing an antilock braking algorithm [3]
Figure 5 represents the scheme of vehicle power fluxDuring braking maneuver (red arrows) the kinetic energy ofthe vehicle is transformed by electric motors in electric energythat is delivered to battery storage system During acceleratingmaneuvers (green arrows) the energy stored in the battery isdelivered to the wheels passing through inverters and then it istransformed in kinetic energy Considering that electric motorsand the energy storage system are usually designed for vehicletraction phase the most critical condition occurs duringbraking maneuver where required acceleration performancesare higher in traction condition for safety reasone power tobe dissipated when braking is in general much larger than theone required in drivinge battery capacity rate (Crate) and theState of Charge (SOC) are two important parameters to definethe battery capability in accepting the input power when re-generative braking is considered Yaici et al [28] review dif-ferent recent application of various batterysupercapacitor
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
Mot
or p
ower
[kW
]
01
010203040501020304050102030405
02 03
03
04
04
05 06
0507
06
07
0706
07
0808
08 08
07
08
08
07
09
09
09
EfficiencyPeak torqueContinous torque
Peak powerPeak power
ndash1000
ndash500
0
500
1000
Mot
or to
rque
[Nm
]
200 400 600 800 14001000 1200 16000Motor speed [rpm]
07
0102030405010203040506
080706
08
Figure 2 IWMmotor curve characteristic e motor curve characteristic refers to ProteanDrive Pd18 in wheel motor by Protean Electrice maximum torque of the motor is function of the motor angular speed
Reference path
d
h
y
FyrFyfvy
vx vf x
vβ
vr
αfαr
δ
ψ
Figure 3 Vehicle single-track model e TV model used in thesesimulations is based on the vehicle single-track model
4 Mathematical Problems in Engineering
hybrid system in EVs and different lithium-ion battery modelsfor automotive applications have been largely treated in lit-erature ([29ndash31]) From these papers thanks to the use of thesupercapacitors and the presence of different energy storagesystems layouts the problem related to the power flux and theCrate seems to be overcome because the energy storage systemscan absorb extremely big amount of power (with respect toHEVPHEV) e bottleneck of the power in regenerationstrategies is now the DEMs ese considerations allow toneglect the impact of the power supply on the braking controlalgorithm and to consider only motor characteristic and ef-ficiency to impact on the torque distribution optimization
32 Design Variables e goal of a regenerative brakingdistribution is to find the correct torque quantity that mustbe provided from each electric motor and from each brakecaliper So the problem design variables are the electric andfriction torques at each wheel
Tij where i E F and j FR FL RR RL (6)
(i) E electric(ii) F friction(iii) FR front right wheel
(iv) FL front left wheel(v) RR rear right wheel(vi) RL rear left wheel
us the total number of considered design variables iseight the four electric torques by DEMS and the four frictiontorques by hydraulic brakes
33 Objective Function e goal of the optimizationproblem is to maximize the power recovered during brakingmaneuver e power recovered is equal to the brakingtorque applied at each wheel (TEj) multiplied by the wheelangular speed (ωj) and the motor efficiency (η(TEjωj))
that again is function of the torque required and wheelangular speed e power that each electric motor can re-generate can be calculated as Pj TEj middot ωj middot η(TEjωj) etorque applied during braking is negative for conventionwhile the wheel angular speed and motor efficiency arealways positive e total energy recovered during brakingmaneuver is equal to the sum of the power coming from eachwheel Maximizing the power recovered at each time instantcorresponds to maximize the total energy regeneratedduring the entire period of the braking maneuver emaximization problem is converted as minimization
Brake pedalTotal torque
required
Total torquerequired
Emergencybraking
Mechanicalbraking
Yes
Yes
No
No
Is a wheel
slidingSOC lt 08
Regenerativebraking
TV controllogic
Total yawmomentrequired
Torque distributionalgorithm
(minimization problem)
Wheels angular velocity
Vehicle lateral acceleration
Road inclination angle
Electrical and frictiontorque at each wheel
Figure 4 Braking algorithm scheme e torque distribution algorithm is represented with a black box scheme to underline the algorithmworking conditions and the logics inputs and outputs
Energy storagesystem Inverters
Electricmotor
Electricmotor
Vehicle speed
Figure 5 Vehicle power fluxese green arrows represent the power fluxes from the batteries to the road during traction phase and the redarrows represent the power fluxes during regenerative braking
Mathematical Problems in Engineering 5
problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

(i) ree displacements of the vehicle center of mass(com)
(ii) ree rotations of the car body (yaw pitch and roll)(iii) Four vertical displacements of unsprung masses(iv) Four wheels angular velocities about hub axis
Some subsystems have been added to the ViCar modelsuch as the electric motors model the friction brake modeldriver model and the TV control logic All the parameters ofthe vehicle such as masses inertias motors dimension andbrakes dimensions have been designed considering commer-cial electric vehicles whose main data are reported in Table 1
21 Electric Motor Model e reference vehicle is driven byfour in-wheel motors which are modelled from a me-chanical point of view e torque versus speed character-istic for both driving and braking is considered as shown inFigure 2 An equivalent first-order time lag transfer functionwith the same bandwidth of real motors reproduces thedynamics of the motor torque regulator [25]
TE 1
τms + 1TE (1)
where s is the Laplace coordinate TE is the required torqueby the controller while TE is the effective output torque τm
is the time constant of motor plus motor drive In-wheelmotors data are taken from [26] Dimensions of IWM aresuitable for 18Prime wheels which are supported by the con-sidered vehicle
22 Friction Brake Model e friction brakes have beenmodelled from a mechanical point of view As reported inequation (2) the friction torque provided by mechanicalbrakes is proportional to the oil pressure inside the brakecaliper by a constant of proportionality Kb e dynamics ofthe oil pressure at the brake caliper are expressed by a puretime delay T0 combined with a second order transferfunction considering oil pump and circuit dynamics whichin Laplace domain reads
pcal eminus sT0
1T21s
2+ T2s + 1
pcal (2)
where pcal is the pressure at the brake caliper pcal is thepressure required by the control logic s is Laplace coor-dinate and T1 and T2 are the brake system time constants
23 DriverModel Driver model is needed to run close loopmaneuver It is path follower coupled with a cruise control tofollow reference speed [10] e path follower is a pro-portional controller based on distance error and headingerror (see Figure 3)
δ 2l
L2 dKpdWd + hKphWh (3)
e first part of the equation refers to distance error andthe second part refers to heading error Kpd and Wd are
respectively the proportional gain and the weight related tothe distance error (d cos ψ[Yref minus (YG + L sin ψ)] minus sinψ[Xref minus (XG + L cos ψ)]) h is the heading error and Kph
and Wh are the proportional gain and the weight related tothe heading error (h ψref minus ψ) L is the forward previewdistance that reproduces driver capability in anticipating itsinputs according to road shape in front of the car
24 TV Control Logic Torque vectoring control strategy istaken from literature ([27]) not being the focus of thepresent paper It generates a yaw moment MZreq thatstabilizes the vehicle and improves its performances bytracking yaw rate and sideslip angle references It is basedon a proportional controller on the vehicle yaw rate _ψ andvehicle sideslip angle β
MZreq Kp _ψ _ψref minus _ψ( 1113857 + Kpβ βref minus β( 1113857 (4)
Kpβ and Kp _ψ are the proportional gain on yaw moment andvehicle sideslip angle respectively Referring to Figure 3 thereference value of _ψref and βref can be calculated from thesingle-track model as
_ψref Vδ
L 1 + KUrefV2
1113872 1113873
βref _ψreflR
Vminus
mlF
LKTR
1113888 1113889
⎧⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎩
(5)
where KUref (ml2)((lRKTF) minus (lFKTR)) is the desiredundersteer coefficient
3 Torque Distribution Algorithm
31 Preliminary Considerations rough the advantages ofhaving four independently wheels driven vehicle there is thepossibility to control independently the torque at eachwheel is powertrain layout leads the possibility to have anonsymmetric torque distribution around the vehicleallowing torque vectoring Depending on the driving situ-ation it is possible to have different performance objectivesin case of panic braking for example the driver requires thevehicle to stop in the smallest space possible without losingthe vehicle stability and maneuverability In a commercialpassenger car in normal driving conditions (not panicbraking so for deceleration rates below 6ms2 on dry as-phalt) the main objective during braking phase is to recover
Table 1 Main vehicle parameters
Symbol Parameter Value Unitm Vehicle mass 1947 kgJz Yaw moment of inertia 25598 kg m2
l Wheelbase 2875 mlf Com to front axle distance 1380 mlr Com to rear axle distance 1495 mhG Com height from ground 0660 mcf Front track width 1497 mcr Rear track width 1495 m
Mathematical Problems in Engineering 3
the vehicle kinetic energy as much as possible guaranteeinganyway the driver requests in terms of longitudinal decel-eration and having the possibility to control independentlythe torque on the left and right side of the vehicle the yawmoment required by the TV control logic Having thepossibility to provide the braking torque at each wheelexploiting the friction brake and the DEM the torquedistribution problem has been solved with a mathematicaloptimum-search approache problem design variables areeight and correspond to the four friction torques and thefour electric torques (ie one at each wheel) the objectivefunction considers the DEMs efficiency map and corre-sponds to the regenerated power for each dynamic condi-tion and the additional optimum problem constraintsconsider the vehicle dynamics driver requirements andphysical limits of the vehicle components
Figure 4 shows the braking algorithm functional blockscheme e brake pedal position generates a total brakingtorque request for the controller e required torque istranslated in a brake input considering the possibility ofusing the electric motors and mechanical brakes based onvehicle dynamics and vehicle energy storage system statusIn case of panic braking or low wheel-road friction coeffi-cient a wheel can lock causing vehicle instability andor lossof steerability To avoid wheel locking the torque at thiswheel can be controlled differently not considering asprimary goal the energy regeneration but the passengerssafety So at any request of braking torque by the driver if awheel is slipping the torque at that wheel can be controlledusing an antilock braking algorithm [3]
Figure 5 represents the scheme of vehicle power fluxDuring braking maneuver (red arrows) the kinetic energy ofthe vehicle is transformed by electric motors in electric energythat is delivered to battery storage system During acceleratingmaneuvers (green arrows) the energy stored in the battery isdelivered to the wheels passing through inverters and then it istransformed in kinetic energy Considering that electric motorsand the energy storage system are usually designed for vehicletraction phase the most critical condition occurs duringbraking maneuver where required acceleration performancesare higher in traction condition for safety reasone power tobe dissipated when braking is in general much larger than theone required in drivinge battery capacity rate (Crate) and theState of Charge (SOC) are two important parameters to definethe battery capability in accepting the input power when re-generative braking is considered Yaici et al [28] review dif-ferent recent application of various batterysupercapacitor
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
Mot
or p
ower
[kW
]
01
010203040501020304050102030405
02 03
03
04
04
05 06
0507
06
07
0706
07
0808
08 08
07
08
08
07
09
09
09
EfficiencyPeak torqueContinous torque
Peak powerPeak power
ndash1000
ndash500
0
500
1000
Mot
or to
rque
[Nm
]
200 400 600 800 14001000 1200 16000Motor speed [rpm]
07
0102030405010203040506
080706
08
Figure 2 IWMmotor curve characteristic e motor curve characteristic refers to ProteanDrive Pd18 in wheel motor by Protean Electrice maximum torque of the motor is function of the motor angular speed
Reference path
d
h
y
FyrFyfvy
vx vf x
vβ
vr
αfαr
δ
ψ
Figure 3 Vehicle single-track model e TV model used in thesesimulations is based on the vehicle single-track model
4 Mathematical Problems in Engineering
hybrid system in EVs and different lithium-ion battery modelsfor automotive applications have been largely treated in lit-erature ([29ndash31]) From these papers thanks to the use of thesupercapacitors and the presence of different energy storagesystems layouts the problem related to the power flux and theCrate seems to be overcome because the energy storage systemscan absorb extremely big amount of power (with respect toHEVPHEV) e bottleneck of the power in regenerationstrategies is now the DEMs ese considerations allow toneglect the impact of the power supply on the braking controlalgorithm and to consider only motor characteristic and ef-ficiency to impact on the torque distribution optimization
32 Design Variables e goal of a regenerative brakingdistribution is to find the correct torque quantity that mustbe provided from each electric motor and from each brakecaliper So the problem design variables are the electric andfriction torques at each wheel
Tij where i E F and j FR FL RR RL (6)
(i) E electric(ii) F friction(iii) FR front right wheel
(iv) FL front left wheel(v) RR rear right wheel(vi) RL rear left wheel
us the total number of considered design variables iseight the four electric torques by DEMS and the four frictiontorques by hydraulic brakes
33 Objective Function e goal of the optimizationproblem is to maximize the power recovered during brakingmaneuver e power recovered is equal to the brakingtorque applied at each wheel (TEj) multiplied by the wheelangular speed (ωj) and the motor efficiency (η(TEjωj))
that again is function of the torque required and wheelangular speed e power that each electric motor can re-generate can be calculated as Pj TEj middot ωj middot η(TEjωj) etorque applied during braking is negative for conventionwhile the wheel angular speed and motor efficiency arealways positive e total energy recovered during brakingmaneuver is equal to the sum of the power coming from eachwheel Maximizing the power recovered at each time instantcorresponds to maximize the total energy regeneratedduring the entire period of the braking maneuver emaximization problem is converted as minimization
Brake pedalTotal torque
required
Total torquerequired
Emergencybraking
Mechanicalbraking
Yes
Yes
No
No
Is a wheel
slidingSOC lt 08
Regenerativebraking
TV controllogic
Total yawmomentrequired
Torque distributionalgorithm
(minimization problem)
Wheels angular velocity
Vehicle lateral acceleration
Road inclination angle
Electrical and frictiontorque at each wheel
Figure 4 Braking algorithm scheme e torque distribution algorithm is represented with a black box scheme to underline the algorithmworking conditions and the logics inputs and outputs
Energy storagesystem Inverters
Electricmotor
Electricmotor
Vehicle speed
Figure 5 Vehicle power fluxese green arrows represent the power fluxes from the batteries to the road during traction phase and the redarrows represent the power fluxes during regenerative braking
Mathematical Problems in Engineering 5
problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

the vehicle kinetic energy as much as possible guaranteeinganyway the driver requests in terms of longitudinal decel-eration and having the possibility to control independentlythe torque on the left and right side of the vehicle the yawmoment required by the TV control logic Having thepossibility to provide the braking torque at each wheelexploiting the friction brake and the DEM the torquedistribution problem has been solved with a mathematicaloptimum-search approache problem design variables areeight and correspond to the four friction torques and thefour electric torques (ie one at each wheel) the objectivefunction considers the DEMs efficiency map and corre-sponds to the regenerated power for each dynamic condi-tion and the additional optimum problem constraintsconsider the vehicle dynamics driver requirements andphysical limits of the vehicle components
Figure 4 shows the braking algorithm functional blockscheme e brake pedal position generates a total brakingtorque request for the controller e required torque istranslated in a brake input considering the possibility ofusing the electric motors and mechanical brakes based onvehicle dynamics and vehicle energy storage system statusIn case of panic braking or low wheel-road friction coeffi-cient a wheel can lock causing vehicle instability andor lossof steerability To avoid wheel locking the torque at thiswheel can be controlled differently not considering asprimary goal the energy regeneration but the passengerssafety So at any request of braking torque by the driver if awheel is slipping the torque at that wheel can be controlledusing an antilock braking algorithm [3]
Figure 5 represents the scheme of vehicle power fluxDuring braking maneuver (red arrows) the kinetic energy ofthe vehicle is transformed by electric motors in electric energythat is delivered to battery storage system During acceleratingmaneuvers (green arrows) the energy stored in the battery isdelivered to the wheels passing through inverters and then it istransformed in kinetic energy Considering that electric motorsand the energy storage system are usually designed for vehicletraction phase the most critical condition occurs duringbraking maneuver where required acceleration performancesare higher in traction condition for safety reasone power tobe dissipated when braking is in general much larger than theone required in drivinge battery capacity rate (Crate) and theState of Charge (SOC) are two important parameters to definethe battery capability in accepting the input power when re-generative braking is considered Yaici et al [28] review dif-ferent recent application of various batterysupercapacitor
ndash80
ndash60
ndash40
ndash20
0
20
40
60
80
Mot
or p
ower
[kW
]
01
010203040501020304050102030405
02 03
03
04
04
05 06
0507
06
07
0706
07
0808
08 08
07
08
08
07
09
09
09
EfficiencyPeak torqueContinous torque
Peak powerPeak power
ndash1000
ndash500
0
500
1000
Mot
or to
rque
[Nm
]
200 400 600 800 14001000 1200 16000Motor speed [rpm]
07
0102030405010203040506
080706
08
Figure 2 IWMmotor curve characteristic e motor curve characteristic refers to ProteanDrive Pd18 in wheel motor by Protean Electrice maximum torque of the motor is function of the motor angular speed
Reference path
d
h
y
FyrFyfvy
vx vf x
vβ
vr
αfαr
δ
ψ
Figure 3 Vehicle single-track model e TV model used in thesesimulations is based on the vehicle single-track model
4 Mathematical Problems in Engineering
hybrid system in EVs and different lithium-ion battery modelsfor automotive applications have been largely treated in lit-erature ([29ndash31]) From these papers thanks to the use of thesupercapacitors and the presence of different energy storagesystems layouts the problem related to the power flux and theCrate seems to be overcome because the energy storage systemscan absorb extremely big amount of power (with respect toHEVPHEV) e bottleneck of the power in regenerationstrategies is now the DEMs ese considerations allow toneglect the impact of the power supply on the braking controlalgorithm and to consider only motor characteristic and ef-ficiency to impact on the torque distribution optimization
32 Design Variables e goal of a regenerative brakingdistribution is to find the correct torque quantity that mustbe provided from each electric motor and from each brakecaliper So the problem design variables are the electric andfriction torques at each wheel
Tij where i E F and j FR FL RR RL (6)
(i) E electric(ii) F friction(iii) FR front right wheel
(iv) FL front left wheel(v) RR rear right wheel(vi) RL rear left wheel
us the total number of considered design variables iseight the four electric torques by DEMS and the four frictiontorques by hydraulic brakes
33 Objective Function e goal of the optimizationproblem is to maximize the power recovered during brakingmaneuver e power recovered is equal to the brakingtorque applied at each wheel (TEj) multiplied by the wheelangular speed (ωj) and the motor efficiency (η(TEjωj))
that again is function of the torque required and wheelangular speed e power that each electric motor can re-generate can be calculated as Pj TEj middot ωj middot η(TEjωj) etorque applied during braking is negative for conventionwhile the wheel angular speed and motor efficiency arealways positive e total energy recovered during brakingmaneuver is equal to the sum of the power coming from eachwheel Maximizing the power recovered at each time instantcorresponds to maximize the total energy regeneratedduring the entire period of the braking maneuver emaximization problem is converted as minimization
Brake pedalTotal torque
required
Total torquerequired
Emergencybraking
Mechanicalbraking
Yes
Yes
No
No
Is a wheel
slidingSOC lt 08
Regenerativebraking
TV controllogic
Total yawmomentrequired
Torque distributionalgorithm
(minimization problem)
Wheels angular velocity
Vehicle lateral acceleration
Road inclination angle
Electrical and frictiontorque at each wheel
Figure 4 Braking algorithm scheme e torque distribution algorithm is represented with a black box scheme to underline the algorithmworking conditions and the logics inputs and outputs
Energy storagesystem Inverters
Electricmotor
Electricmotor
Vehicle speed
Figure 5 Vehicle power fluxese green arrows represent the power fluxes from the batteries to the road during traction phase and the redarrows represent the power fluxes during regenerative braking
Mathematical Problems in Engineering 5
problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

hybrid system in EVs and different lithium-ion battery modelsfor automotive applications have been largely treated in lit-erature ([29ndash31]) From these papers thanks to the use of thesupercapacitors and the presence of different energy storagesystems layouts the problem related to the power flux and theCrate seems to be overcome because the energy storage systemscan absorb extremely big amount of power (with respect toHEVPHEV) e bottleneck of the power in regenerationstrategies is now the DEMs ese considerations allow toneglect the impact of the power supply on the braking controlalgorithm and to consider only motor characteristic and ef-ficiency to impact on the torque distribution optimization
32 Design Variables e goal of a regenerative brakingdistribution is to find the correct torque quantity that mustbe provided from each electric motor and from each brakecaliper So the problem design variables are the electric andfriction torques at each wheel
Tij where i E F and j FR FL RR RL (6)
(i) E electric(ii) F friction(iii) FR front right wheel
(iv) FL front left wheel(v) RR rear right wheel(vi) RL rear left wheel
us the total number of considered design variables iseight the four electric torques by DEMS and the four frictiontorques by hydraulic brakes
33 Objective Function e goal of the optimizationproblem is to maximize the power recovered during brakingmaneuver e power recovered is equal to the brakingtorque applied at each wheel (TEj) multiplied by the wheelangular speed (ωj) and the motor efficiency (η(TEjωj))
that again is function of the torque required and wheelangular speed e power that each electric motor can re-generate can be calculated as Pj TEj middot ωj middot η(TEjωj) etorque applied during braking is negative for conventionwhile the wheel angular speed and motor efficiency arealways positive e total energy recovered during brakingmaneuver is equal to the sum of the power coming from eachwheel Maximizing the power recovered at each time instantcorresponds to maximize the total energy regeneratedduring the entire period of the braking maneuver emaximization problem is converted as minimization
Brake pedalTotal torque
required
Total torquerequired
Emergencybraking
Mechanicalbraking
Yes
Yes
No
No
Is a wheel
slidingSOC lt 08
Regenerativebraking
TV controllogic
Total yawmomentrequired
Torque distributionalgorithm
(minimization problem)
Wheels angular velocity
Vehicle lateral acceleration
Road inclination angle
Electrical and frictiontorque at each wheel
Figure 4 Braking algorithm scheme e torque distribution algorithm is represented with a black box scheme to underline the algorithmworking conditions and the logics inputs and outputs
Energy storagesystem Inverters
Electricmotor
Electricmotor
Vehicle speed
Figure 5 Vehicle power fluxese green arrows represent the power fluxes from the batteries to the road during traction phase and the redarrows represent the power fluxes during regenerative braking
Mathematical Problems in Engineering 5
problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

problem due to the negative sign of the total power eobjective function can be stated as
min 1113944jFRFLRRRL
TEj middot ωj middot η TEjωj1113872 1113873⎡⎢⎢⎣ ⎤⎥⎥⎦ (7)
34DesignVariable Space e design variables space can bedescribed considering the friction brake system the EMsarchitecture and the maximum torque that can be trans-mitted to the road e friction brake torque is proportionalto the pressure times a constant gain (Kb) as
TF minus Kbpcal (8)
eminimum values that the friction torque can assumeare given by the maximum pressure (pmax) that can bereached inside the caliper e upper bound to TF is 0 beingfriction torques always dissipative and the friction torquesdomain is thus
TFj isin minus Kbpmax 01113858 1113859 where j FR FL RR RL (9)
Electric motors can provide negative (regenerative)torque which is function of motor speed as represented inFigure 2 by solid lines in magenta color e motor curvecharacteristic is function of motor peak torque and peakpower For extremely low speed the EMs can providenegative braking torque but with almost no efficiency In
fact the efficiency drops below 10 for high braking torquesand speeds lower than 150 rpms
Since the distribution algorithm focuses on brakingmaneuver the upper limit of the motor torque is set to zeroe limitations of the electric torques can be expressed as
TEj isin TEmin ωj1113872 1113873 01113960 1113961 where j FR FL RR RL
(10)
35 Equality Constraints e equality constraints representthe requirements that must be satisfied When the car isrunning it is necessary that the driver inputs must berespected thus the total required torque TReq has to becorrectly applied to the car by the torque distributor
TReq 1113944jFRFLRRRL
TEj + TFj (11)
Having four independently driven wheels it is possibleto have some torque vectoring on the vehicle and the op-timal asymmetrical torque distribution on the wheels can becomputed including the equation (12) to the optimal controlproblemMZReq corresponds to the total torque that must beprovided to the vehicle and the right part of the equationcontains the design variables ensuring that the total yawmoment required can be provided
MZReq TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cF
2Rw
+ TEFL + TFFL1113872 1113873 minus TEFR + TFFR1113872 11138731113872 1113873cR
2Rw
(12)
36 Inequality Constraints e optimal control problem iscompleted including some additional constraints that mustbe respected ey are not so binding as the equality con-straints because we define a range of values in which theoptimal control problem solutionmust be includedey arenecessary to guarantee the vehicle stability during brakingmaneuver
Brakes pressure and motor characteristics are not theonly limitation when considering wheel dynamics tire-roadadhesion must be considered e limit force that can betransmitted to the ground is proportional to the vertical load(Fz) acting on the wheel and wheel-road friction coefficientμ e total torque on the wheel which is the sum of electricand hydraulic brakes torques shall not exceed the limitfriction torque as expressed in
TEj + TFj
11138681113868111386811138681113868
11138681113868111386811138681113868le microFZjRw where j FR FL RR RL
(13)To correctly use equation (13) the vertical load at each
wheel must be evaluated is is done by estimating itaccording to the lateral acceleration and the wheels angularvelocities are normally measured on commercial cars
e vertical forces at each wheel are computed accordingto the following equations
FzFR mg
2lR
lminus
AxReqhG
glminus2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzFL mg
2lR
lminus
AxReqhG
gl+2hGAy
cFg
KρF
KρF + KρR
1113888 11138891113888 1113889
FzRR mg
2lF
l+
AxReqhG
glminus2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
FzRL mg
2lF
l+
AxReqhG
gl+2hGAy
cRg
KρR
KρF + KρR
1113888 11138891113888 1113889
(14)
With
(i) AxReq driver required vehicle longitudinalacceleration
(ii) Ay vehicle lateral acceleration(iii) cF vehicle front track(iv) cR vehicle rear track(v) Fz contact forces perpendicular to the ground(vi) g gravitational acceleration
6 Mathematical Problems in Engineering
(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

(vii) hG distance between the center of mass and theground
(viii) KρF front axle equivalent rolling stiffness(ix) KρR rear axle equivalent rolling stiffness(x) l vehicle wheelbase(xi) lF distance between the center of mass and the
vehicle front axle(xii) lR distance between the center of mass and the
vehicle rear axle(xiii) m vehicle mass
To account for longitudinal load transfer due to longi-tudinal acceleration the required driver acceleration (AxReq)
is used instead of the measured longitudinal accelerationis is to avoid undesired chattering in the controller edesired longitudinal acceleration (AxReq) is calculated as theminimum between the acceleration produced by wheeltorques and the friction limit acceleration as
AxReq min AxT Axμ1113960 1113961 (15)
where AxT is the acceleration produced by total requiredtorque by driver TReq which is supposed to be applied on thewheel being a hard constraint and it is computed from theequilibrium of the forces that acts on the vehicle in longi-tudinal direction In this way the longitudinal acceleration isfunction of the vehicle speed and the driver required torqueallowing to predict the future state of the vehicle instead tomeasure the actual one
AxT 1m
TReq
Rw
minus Fres1113888 1113889 (16)
where Fres considers rolling and aerodynamic resistanceforces acting on the car
e friction limited longitudinal acceleration Axμ de-pends upon the friction coefficient and the lateral acceler-ation as
Axμ minus
(μg)2
minus A2y
1113969
(17)
is equation considers that the car has a maximum totalacceleration given by friction ellipse (μg) when corneringthe maximum exploitable longitudinal acceleration is lessdue to the coupling effect with lateral acceleration Ay
Other constraints are derived from the European reg-ulation ECE-R13 [32] and define the upper and lower limitsof the force distribution on the rear axle with respect thefront one (Figure 6(b)) necessary to guarantee vehiclestability during braking maneuver Looking at theFigure 6(a) from the force equilibrium in longitudinal di-rection and considering the limit adhesion conditions it ispossible to write the following equation
FxF + FxR max mμg (18)
where the same friction coefficient μ is assumed for front andrear wheels
From equilibrium equations it is possible to derive therelationship between the front axle contact forces and rearaxle contact forces
FxF
FxR
lR + μhG
lF minus μhG
(19)
Combining equations (18) and (19) and eliminating thedependency by the wheel-road friction coefficient (μ) therear axle force (FxR) in limit conditions can be expressed asfunction of front axle force (FxF) as in equation (20) isfront-rear axle force distribution is also called idealdistribution
FxR mglR
2hG
minus FxF1113888 1113889 minusmg
2hG
l2R minus 4lhGFxF( 1113857
1113969
(20)
Equation (13) describes the upper limit of the forcetransmitted to the rear axle as function of the force that canbe transmitted to the front axle (blue line in Figure 6(a)) toavoid rear wheel locking condition which will result inunstable vehicle behavior en considering the longitu-dinal contact force at each wheel equal to the sum of electricand friction torque divided by the wheel rolling radius therelative inequality constraint is
TERR + TFRR + TERL + TFRL
Rw
le mglR
2hG
minusTEFR + TFFR + TEFL + TFFL
Rw
1113888 1113889 minusmg
2hG
l2R minus 4lhG
TEFR + TFFR + TEFL + TFFL
mgRw
1113888 1113889
1113971
(21)
e lower limit of the torque at the rear axle with respectto the front one is expressed in the ECE-R13 regulations([17 33]) as
ax
gge 01 + 085(μ minus 02) (22)
Making the same substitutions done for the upperlimitations the lower limit on torque distribution can beexpressed as
1113936jFRFLRRRLTEj + TFj
Rw
11138681113868111386811138681113868111386811138681113868
11138681113868111386811138681113868111386811138681113868ge 01 + 085(μ minus 02) (23)
Finally an inequality constraint is necessary to avoidsituations in which the front and rear yaw moment have anopposite sign as follows
MzF middot MzR ge 0 (24)
Mathematical Problems in Engineering 7
37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

37 Minimization Problem Numerical Results e torqueminimization algorithm depends on driver inputs like thedriver required torque stability control system the total yawmoment required and car state the wheel angular velocityand the lateral acceleration e solution of such a mini-mization problem requires a computational effort thatwould require an expensive solver to be run in real timeealgorithm is thus solved offline considering a range of valuesof the input parameters and then is implemented on thevehicle with lookup tables that are linearly interpolatedTable 2 reports the considered boundary values of inputparameters
e total torque required by the driver is limited to anabsolute value of 4000Nm because this torque is sufficient toprovide the vehicle a deceleration of about 6ms2 on dryasphalt (μ 09) without incurring in wheel locking con-ditions Since the torque distribution analyzed refers to acommercial passenger car in normal driving conditions thisvalue of deceleration is sufficiently high In addition thealgorithm developed has been solved considering a tire roadfriction coefficient equal to 09 considering that for lowerfriction coefficients the wheel sliding condition can beavoided thanks to safety systems like the antilock brakesystem (ABS) e motor speed maximum value is1600 rpm which corresponds to a car speed of 200 kmhe lateral acceleration boundary value is equal tog 981ms2 being limited by road adhesion coefficientYaw moment range values are derived from motor maxi-mum torque
e problem has been solved using the Matlab functionldquofminconrdquo that finds the minimum of constrained nonlinearmultivariable functions applying the ldquoSqprdquo method
Figure 7 represents the solution of the minimizationproblem in dynamic conditions when vehicle is running on astraight road When driver requires small braking torquethe vehicle is slowed down by the front axle electric brakeonly Instead when the torque request is higher the algo-rithm distributes the braking torque between the front andrear axle according to ideal distribution is result is due to
load transfer that increases the front axle vertical load andallows the front wheels to deliver more braking torque to theground Looking at motor efficiency map (Figure 2) itbecomes clear why the solver prefers to use higher torqueson two motors than smaller torques on four motors Due tolimitations on minimum use of rear axle a certain torque isrequested to the rear axle even if this worsens the totalefficiency
Friction brakes are used to compensate for the lack ofelectric torque at extremely low motor speed on both axlesIn front axles the friction brakes are also used at higherspeed where the electric motor torque is saturated accordingto motor characteristics In the rear axle on the other handthe friction brakes are not used at high speed since themotor torque is enough to brake the wheels is happensbecause of load transfer that unloads the rear wheels thusreducing the transferrable longitudinal force Road adhesionis thus limiting the wheel braking torque and not the motorcharacteristic
4 Simulations Results
41 Comparing Strategies To compare the new torquecontrol logic two alternatives control logics have beenimplemented in the following logic A and logic B while thecontrol strategy presented in the previous paragraph will bereferred to as strategy C
Strategy A (blue line in Figure 8) exploits a proportionalfront-rear brake repartition is distribution is usuallyadopted in vehicles with mechanical brake distributor inwhich the front to rear repartition is fixed In this case theproportionality coefficient is equal to the ratio between therear and the front brake equivalent coefficients(KbF andKbR respectively) until the force at the rear axledoes not overcome the limit of ideal force distributionenthe torque distribution at the rear axle remains constant forany value of torque required and only the force at the frontaxle increases Transition from linear to constant rear axletorque corresponds to front-rear distribution value when the
z
G
mgmax
hG
Fxr
Fzr
Fxf
Fzf
lr lfl
x
(a)
μ F =
02
μ F =
04
μ F =
06
μ F =
08
μ F =
1
μ F =
12
μF = 02
μF = 04
μF = 06
Upper limit braking repartitionLower limit braking repartition
104 06 08020FxFmg [ndash]
0
005
01
015
02
025
03
F xR
mg
[ndash]
(b)
Figure 6 Front right brake distribution limitations (a) Scheme of vehicle forces when braking (b) Normalized front-rear force distributionlimitations according to ECE-R13 regulation
8 Mathematical Problems in Engineering
Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

Table 2 External parameters discretization for minimization problem
Variable Symbol Min value Max value Unit PointsDriver required torque Treq minus 4000 0 Nm 21Wheelmotor angular velocity ωw 0 1600 rpm 21Yaw moment required Mzreq minus 1500 1500 Nm 11Lateral acceleration Ay minus g g ms2 11Road slope α minus 10 10 deg 11
Front electric brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(a)
Front friction brake
0
ndash500
ndash1000
ndash15000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(b)
Rear electric brake
0
ndash400ndash200
ndash600ndash800
0ndash2000
ndash4000 01000
2000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(c)
Rear friction brake
0
ndash200
ndash400
ndash6000
ndash2000ndash4000 0
10002000
Torq
ue [N
m]
Torque required [Nm] ω [rpm]
(d)
Figure 7 Friction and electric braking torque distribution on the front and rear wheels in dynamics conditions Mzreq 0 Ay 0
and α 0 e results refer only to the front right and rear right wheel because for the parameters selected the problem is symmetric
Logic B Logic A
0
1000
2000
3000
4000
5000
Rear
axle
long
itudi
nal f
orce
[N]
5000 10000 150000Front axle longitudinal force [N]
Figure 8 Braking distribution strategies A and Be blue line refers to distribution strategy A and the red line to the distribution strategyB that is equivalent to the ideal distribution
Mathematical Problems in Engineering 9
proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

proportional curve intersects the ideal braking distribution(see Figure 8)
Strategy B exploits the ideal front-rear toque distribution(red line in Figure 8) is repartition is the most used inliterature ([12 17ndash20]) because it guarantees the minimumstopping distance increasing the braking performances
For both strategies the total braking torque required isprovided by the braking system exploiting the electricbraking torque until the motor limit is reached then theremaining demanded torque is provided by friction brakes
e yaw moment necessary to satisfy the TV request issplit front to rear according to the front to rear distributionstrategy en each wheel contributes to generating half ofthe total yaw moment required at the respective axle as
TFR 12TF minus MZReq
TF
TReq
Rw
cF
TFL 12TF + MZReq
TF
TReq
Rw
cF
TRL 12TR minus MZReq
TR
TReq
Rw
cR
TRR 12TR + MZReq
TR
TReq
Rw
cR
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(25)
TF and TR are the total required torques on front and rearaxle respectively Rw is the wheel rolling radius and cF andcR are the front and rear track half width
42 Longitudinal Dynamics Simulations Results
421 Constant Deceleration Braking Maneuvers Tocompare the effects of the new control logic (logic C) with Aand B in all the range of required torque in which it has beendesigned to operate a braking maneuver is simulated inwhich the initial speed is set to 200 kmh and then constantdeceleration speed profile is requested until the vehicle stopse maneuvers have been performed in a MatlabSimulinksimulation environment using the vehicle model previouslydescribed e vehicle speed is regulated thanks to a cruisecontrol which generates the driver demanded braking torque
Figure 9 shows the power regeneration efficiency duringbraking maneuver as function of vehicle velocity and vehicledeceleration e power regeneration efficiency ηregW iscomputed as
ηregW Wreg
meqaxv (26)
where Wreg is the effective power that is regenerated whichis normalized with respect to the inertia forces power whichaccounts for equivalent car mass meq (mass plus rotatinginertias)
Logic C regenerates more or at least equal power thanthe other two More in detail due to the larger use of the
front axle motors (Figures 10 and 11) the power regeneratedis higher when the motor torque request is low ie for smalldeceleration values typical of urban driving scenarios asbetter shown in following simulations In fact looking atmotor efficiency map (Figure 2) the efficiency is low at lowtorque values For low decelerations a torque distributionstrategy that accounts for motor efficiency can show largerperformance improvements For deceleration greater than02 g the distribution of the logics B and C is the same andso also the power regenerated e difference between thethree strategies is in the order of few points To betterhighlight the differences the following additional consid-erations are drawn
Figure 10 shows the electric and friction torques appliedrespectively at the front and the rear vehicle axle with re-spect to car speed in low-speed range 0ndash50 kmh Figure 11reports same quantities but in high-speed range 50ndash150 kmh Since pure straight driving conditions are considered theleft to right torque distribution is even for all the consideredcontrol strategies At lower decelerations (minus 01 g in Fig-ure 10) all the strategies are not using the rear frictionbrakes since the EMs are enough to apply the requiredtorque Looking at the front to rear torque distribution it ispossible to notice that logic A and logic B are distributing thetorque front to rear according to defined ratios while logic Cis adopting only front motors to achieve the same car de-celerationis allows to recover more energy since the totalefficiency is higher when two motors are not used (rearones) while the other two (front ones) are used with highertorque Front and rear friction brakes are used only by logicC below 10 kmh where the front electric motor efficiency isclose to zero Logic A and logic B use friction brakes forspeeds below 1 kmh
For middle deceleration (minus 03 g in Figure 10) strategiesB and C distribute the torque at the front and rear axle at thesame time and the electromechanical distribution is thesame
At higher deceleration (minus 05 g in Figure 10) on thecontrary strategy B delivers to motors the maximum electrictorque that they can exploit while logic C follows a strategythat favors the best motor efficiency In this way the dis-tribution is different and the energy recovered is slightlyhigher At deceleration of 05 g and for vehicle speed below50 kmh logic C recovers more power with respect logic Bdue to better exploitation of the motor efficiency map
To further analyze the obtained results the total re-covered energy during the braking maneuver is computede energy is then divided by the total vehicle kinetic energyat the beginning of the braking maneuver (Ek (12)meqv20where v0 is 200 kmh) which represents the ideal maximumrecoverable energy during the whole braking maneuverisratio can thus be seen as the energy regeneration efficiencyηregE of the braking maneuver
ηregE Ereg
Ek
(27)
Top graph in Figure 12 shows the results of energy ef-ficiency for the previously presented braking maneuver forseveral deceleration values Bottom graph in Figure 12
10 Mathematical Problems in Engineering
represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

represents the relative improvement of logic C with respectto logic A and logic B εCA and εCB ese coefficients arecomputed as the ratio between the recovered energy of logicC and the one recovered by logic A and logic B respectively
εCA EregC
EregA
εCB EregC
EregB
(28)
e results confirm that for low deceleration the relativeenergy saved is higher for strategy C and that strategy A isbetter than logic B due to the larger use of the front axle
Figure 13 reports the longitudinal forces on the vehiclerear axle as function of the front axle ones where it is possibleto appreciate the front to rear distribution for the threestrategies
422 Driving Cycles To further analyze the controls per-formance in straight driving two urban driving cycles theNEDC [32] and WLTP [10] are simulated e tests havebeen performed using the vehicle model described aboveand using a PI controller on vehicle speed to make thevehicle follow the velocity profile Since the attention isposed on the braking phase the driving distribution strategyis the same for the three logics and its performance is notconsidered here
Figure 14 reports the total energy recovered fromelectric motors in the two driving cycles highlighting thecontribution of each wheel It is to point out that in
NEDC the deceleration is always lower than 1ms2 whilein urban WLTP cycle it is slightly higher but still small(15 ms2) if compared to the braking performance of thecar on dry asphalt In such driving condition a controlstrategy that considers motor efficiency shows greaterbenefits In fact in both driving scenarios the energyrecovered from strategy C is considerably higher than thatof strategies A and B Table 3 summarizes the resultsobtained by reporting the total regenerated energy (EAEB and EC) and the relative one (εCA and εCB as fromequation (28)) Strategy C recovers 19 more thanstrategy A and 22 more than strategy B in NEDC whilein WLTP strategy C recovers 15 more than strategy Aand 17 more than strategy B is happens becausestrategy C prefers to brake with only one axle thus in-creasing the demanded braking torque which makes themotors work in a better working range Figure 15 showsthe working range of front and rear wheels for the threestrategies e color of the points in the graph refers to themotor efficiency Again it is possible to see how strategy Cis preferring to use only front axle to maximize the motorefficiency is choice shows significant benefits and logicC shows higher recovered energy in both driving cyclesComparing the two cycles due to higher decelerations inthe WLTP cycle the use of the rear wheels is larger in thelatter
43 Track Simulations Results To test the controller per-formance including the effect of vehicle lateral dynamics acircuit track has been simulated (Figure 16(a)) e aim ofthis simulation is to inquire the effect of TV on the
Deceleration ndash01g
ABC
0
20
40
60
80
100Po
wer
rege
n effi
cien
cy (
)
50 100 1500Speed (kmh)
(a)
ABC
Deceleration ndash03g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(b)
ABC
Deceleration ndash05g
0
20
40
60
80
100
Pow
er re
gen
effici
ency
()
50 100 1500Speed (kmh)
(c)
Figure 9 Power regeneration efficiency at different decelerations as function of vehicle speed Blue line logic A red line logic B green linelogic C
Mathematical Problems in Engineering 11
distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

distribution strategy in combined longitudinal and lateraldynamics of the car e selected reference path is taken fromGPS data of a real circuit in which the speed reference profileis built so to achieve desired values of both longitudinal andlateral accelerations Two sets of acceleration levels are se-lected as better specified in the following e reference speedprofile of the circuit is offline calculated considering thecircuit curvature (Figure 16(b)) and the maximum acceler-ation and deceleration that the vehicle must reach during thesimulation Given the reference path the procedures tocompute the reference speed are as follows
(i) Compute trajectory curvature
(ii) Compute maximum speed to have desired lateralacceleration value according to trajectory curvature
(iii) Smooth speed obtained to respect maximum andminimum desired longitudinal acceleration in bothdriving and braking
Two sets of accelerations are considered as reported inTable 4 Resulting speed and lateral acceleration profiles arereported in Figures 16(c) and 16(d) respectively Only a
sector is reported for clarification and readability of thediagrams
Figure 17 reports the energies regenerated by the fourwheels during 1 lap of the circuit With the focus being onthe braking control strategy only the energy recovered whenbraking is reported e results can also be expressed inrelative terms using again equation (28) Table 5 reports thenumerical results of relative regenerated energy during onelap simulation to show logic C improvements with respect tologic A and logic B
Figure 17 results show that at low decelerations theenergy recovered is higher for the strategy C due to the largeruse of the front axle wheels and these results are coherentwith the ones in pure straight driving condition (Figures 7and 9) Conversely at higher decelerations even if strategy Ais using more torque in the front than in the rear axle (seecolumn A of Figure 17(b)) the total recovered energy issmaller since the motors are saturating and friction brakesin front are used instead of increasing the electric brakingtorque in the rear axle Another important aspect to behighlighted is the fact that at higher deceleration values therequested electric torque is in general high which makes the
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
503010 40200Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash01g
B rearC frontC rear
A frontA rearB front
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 30 40 500Speed (kmh)
Constant deceleration ndash03g
B rearC frontC rear
A frontA rearB front
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
10 20 300 5040Speed (kmh)
Constant deceleration ndash05g
B rearC frontC rear
A frontA rearB front
Figure 10 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques low speed
12 Mathematical Problems in Engineering
electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

electric motors work in a good efficiency point e benefitof control strategy C is that it is much smaller compared tologics A and B but still positive Figure 18 shows the workingpoints of the four motors for high-speed profile lap Asalready mentioned the torques required at the motors are
large and then the motors work where the efficiency gra-dient is smaller close to the optimum Due to the perfor-mances required at the vehicle in this situation all the threelogics exploit torque values that are close to the motor limitsIn addition the use of torque vectoring behaves as a hard
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0El
ectr
ic to
rque
(Nm
)
10050 150Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash01g
ndash600
ndash500
ndash400
ndash300
ndash200
ndash100
0
Elec
tric
torq
ue (N
m)
50 150100Speed (kmh)
Constant deceleration ndash03g
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
Constant deceleration ndash05g
ndash2500
ndash2000
ndash1500
ndash1000
ndash500
0
Elec
tric
torq
ue (N
m)
100 15050Speed (kmh)
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
B rearC frontC rear
A frontA rearB front
Figure 11 Torque as function of speed during constant deceleration braking maneuvers comparison of control strategies A B andC Upper plots report electric torques while bottom plots report friction torques high speed
Percentual of energy saved
ABC
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
30
40
50
60
70
80
η ene
rgy
reco
vere
d (
)
(a)
Energy saved comparison
CACB
0
2
4
6
8
ε (
)
ndash015ndash02ndash025ndash03ndash035ndash04ndash045ndash05ndash055ndash06Deceleration (g)
(b)
Figure 12 Efficiency of the torque distribution control logics in relative terms during constant deceleration rate braking maneuvers
Mathematical Problems in Engineering 13
ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

ABC
MinIdeal
0
1000
2000
3000
4000
5000
Rear
forc
e [N
]2000 4000 6000 8000 100000
Front force [N]
Figure 13 Front rear force distribution between front and rear axle during constant deceleration braking maneuvers
Front rightFront le
Rear rightRear le
0
50
100
150
200
250
300
350
Ener
gy (W
h)
CA BRegeneration strategy
(a)
Front rightFront le
Rear rightRear le
B CARegeneration strategy
0
100
200
300
400
500
600
700
800En
ergy
(Wh)
(b)
Figure 14 Longitudinal driving cycles energy regenerated for each wheel (a) NEDC cycle (b) WLTP cycle
Table 3 Numerical results of energy regenerated during braking phases in the NEDC and WLTP cycles
Symbol Value Unit
NEDC
EA 27758 WhEB 27363 WhEC 33264 WhεCminus A 1983 εCminus B 2157
WLTP
EA 65035 WhEB 64265 WhEC 75076 WhεCminus A 1544 εCminus B 1682
14 Mathematical Problems in Engineering
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
Front Rear
(a)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(b)
0
02
04
06
08
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
002040608
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
(c)
Figure 15 Working range of the front right and rear right motors during theWLTP cycle In the figures the efficiency of the motors duringthe cycle for front and rear wheels and for logic A B and C is presented
Trajectory
0
100
200
Long
itude
[m]
200 400 6000Latitude [m]
(a)
0
002
004
006
008
Γ [1
m]
500 600 700 800400Curvilinear abscissa [m]
(b)
Figure 16 Continued
Mathematical Problems in Engineering 15
High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

High speedLow speed
0
20
40
60
80
100Ve
loci
ty [k
mh
]
500 600 700 800400Curvilinear abscissa [m]
(c)
ndash6
ndash4
ndash2
0
2
4
6
Acce
lera
tion
[ms
2 ]
500 600 700 800400Curvilinear abscissa [m]
(d)
Figure 16 Circuit simulation characteristics (a) Circuit trajectory (b) Circuit curvature as function of curvilinear abscissa (c) Speedprofiles as function of curvilinear abscissa (d) Acceleration profiles as curvilinear abscissa
B CARegeneration strategy
0
50
100
150
200
250
300
350
400
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(a)
B CARegeneration strategy
0
100
200
300
400
500
600
700
800
900
1000
Ener
gy (W
h)
Front rightFront le
Rear rightRear le
(b)
Figure 17 Energy regenerated for each wheel during the lateral dynamic simulations (a) Low-speed profile (b) High-speed profile
Table 4 Acceleration level in track simulation
axmin (g) axmax (g) aymax (g)Low speed minus 02 02 02High speed minus 04 04 04
Table 5 Numerical results of energy regenerated during braking phases in the lateral dynamics simulations
Symbol Value Unit
Low-speed profile εCminus A 268 εCminus B 043
High-speed profile εCminus A 166 εCminus B 005
16 Mathematical Problems in Engineering
constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

constraint in the optimization problem leading to an ex-tremely limited possibility to increase the performances interms of energy saved so the differences in the results are notso evident as the ones seen for pure straight dynamics
5 Conclusions
e present paper proposes a control strategy that maxi-mizes the regenerated power when braking for vehiclesequipped with distributed electric motors one per eachwheel and conventional friction brakes
e braking strategy distributes the braking torquesamong the electric motors and the friction brakes consideringthe required driver torque and the required yaw moment bytorque vectoring stability control system as hard constraints
e electric motor efficiency and the wheel normal loadare used to allocate the torques to maximize the regenerativepower under different vehicle conditions of speed lateralacceleration Cornering conditions are thus considered thewheel friction saturation is accounted for considering bothlongitudinal and lateral load transfers
Optimization is run offline and results are stored inlookup tables to be used online Performance of the proposedcontroller is compared with other strategies derived from theliterature by means of numerical simulations where typicaldriving cycles as well as track scenario are considered
e proposed control shows superior performances intypical urban scenarios where the vehicle acceleration is smallIn fact the torque allocation which considersmotor efficiencycan gain up to 15 regenerated energy inWLTP driving cyclePerformance is instead comparable but still higher (1-2) inmore aggressive maneuvers as the racetrack where the motordemanded torque is close to the maximum exploitable
Data Availability
ere are no public datasets available All the informationnecessary to reproduce results is in the paper
Conflicts of Interest
e authors declare that they have no conflicts of interest
Rear right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front le
ABC
ndash1000
ndash500
0To
rque
(Nm
)
500 1000 15000ω (rpm)
0
02
04
06
08
Rear le
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Front right
ABC
ndash1000
ndash500
0
Torq
ue (N
m)
500 1000 15000ω (rpm)
0
02
04
06
08
Figure 18 Motors working range during high-speed profile simulation
Mathematical Problems in Engineering 17
References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

References
[1] S Arrigoni D Tarsitano and F Cheli ldquoComparison betweendifferent energy management algorithms for an urban electricbus with hybrid energy storage system based on battery andsupercapacitorsrdquo International Journal of Heavy VehicleSystems vol 23 no 2 pp 171ndash189 2016
[2] M Satoshi ldquoInnovation by in-wheel-motor drive unitrdquo Ve-hicle System Dynamics vol 50 no 6 pp 807ndash830 2012
[3] M Vignati and E Sabbioni ldquoForce-based braking controlalgorithm for vehicles with electric motorsrdquo Vehicle SystemDynamics vol 58 no 9 pp 1348ndash1366 2020
[4] X Sun C Hu G Lei Z Yang Y Guo and J Zhu ldquoSpeedsensorless control of SPMSM drives for EVs with a binarysearch algorithm-based phase-locked looprdquo IEEE Transac-tions on Vehicular Technology vol 69 no 5 pp 4968ndash49782020
[5] X Sun J Cao G Lei Y Guo and J Zhu ldquoA robust deadbeatpredictive controller with delay compensation based oncomposite sliding-mode observer for PMSMsrdquo IEEE Trans-actions on Power Electronics vol 36 no 9 pp 10742ndash107522021
[6] X Sun C Hu G Lei Y Guo and J Zhu ldquoState feedbackcontrol for a PM hub motor based on gray Wolf optimizationalgorithmrdquo IEEE Transactions on Power Electronics vol 35no 1 pp 1136ndash1146 2020
[7] M L Bacci F L Mapelli S Mossina D Tarsitano andM Vignati ldquoWide-speed range sensorless control of an IPMmotor for multi-purpose applicationsrdquo Inventions vol 5no 3 2020
[8] F Braghin E Sabbioni G Sironi and M Vignati ldquoA feed-back control strategy for torque-vectoring of IWM vehiclesrdquoProceedings of the ASME Design Engineering Technical Con-ference vol 3 2014
[9] G Park K Han K Nam H Kim and S B Choi ldquoTorquevectoring algorithm of electronic-four-wheel drive vehiclesfor enhancement of cornering performancerdquo IEEE Transac-tions on Vehicular Technology vol 69 no 4 pp 3668ndash36792020
[10] M Vignati and E Sabbioni ldquoA cooperative control strategyfor yaw rate and sideslip angle control combining torquevectoring with rear wheel steeringrdquo Vehicle System Dynamics2021
[11] T Goggia A Sorniotti L De Novellis and A FerraraldquoTorque-vectoring control in fully electric vehicles via integralsliding modesrdquo in Proceedings of the American ControlConference pp 3918ndash3923 Portland OR USA June 2014
[12] W Xu H Chen H Zhao and B Ren ldquoTorque optimizationcontrol for electric vehicles with four in-wheel motorsequipped with regenerative braking systemrdquo Mechatronicsvol 57 pp 95ndash108 2019
[13] A Mangia B Lenzo and E Sabbioni ldquoAn integrated torque-vectoring control framework for electric vehicles featuringmultiple handling and energy-efficiency modes selectable bythe driverrdquo Meccanica vol 56 no 5 pp 991ndash1010 2021
[14] M Grandone N Naddeo D Marra and G Rizzo ldquoDevel-opment of a regenerative braking control strategy for hy-bridized solar vehiclerdquo IFAC-PapersOnLine vol 49-11pp 497ndash504 2016
[15] C He G Wang Z Gong Z Xing and D Xu ldquoA controlalgorithm for the novel regenerative-mechanical coupledbrake system with by-wire based on multidisciplinary designoptimization for an electric vehiclerdquo Energies vol 11 p 23222018
[16] I Valentin O Javier P omas B Frank S Dzmitry andS Barys ldquoElectric and friction braking control system forAWD electric vehiclesrdquo in Proceedings of the Special SessionldquoVehicle Dynamics Control for Fully Electric Vehiclesndash Outcomes of the European Project E-VECTOORCrdquo Maas-tricht Netherlands June 2014
[17] C Lv J Zhang Y Li and Y Yuan ldquoRegenerative brakingcontrol algorithm for an electrified vehicle equipped with aby-wire brake systemrdquo SAE Technical Paper 2014-01-17912014
[18] Z Zhou C Mi and G Zhang ldquoIntegrated control of elec-tromechanical braking and regenerative braking in plug-inhybrid electric vehiclesrdquo International Journal of VehicleDesign vol 58 no 2ndash4 2012
[19] Y Gao and M Ehsani ldquoElectronic braking system of EV andHEVmdashIntegration of regenerative braking automatic brakingforce control and ABS SAE transactionsrdquo Journal of Pas-senger Cars Electronic and Electrical Systems vol 110pp 576ndash582 2001
[20] J Ko S Ko H Son B Yoo J Cheon and H Kim ldquoDe-velopment of a brake system and regenerative braking co-operative control algorithm for automatic-transmission-based hybrid electric vehiclesrdquo IEEE Transactions on Vehic-ular Technology vol 64 no 2 2015
[21] L Gang and Y Zhi ldquoEfficiency saving control based on motorefficiency map for electric vehicles with four-wheel inde-pendently driven in-wheel motorsrdquo Advances in MechanicalEngineering vol 10 no 8 pp 1ndash18 2018
[22] B Xiao H Lu H Wang J Ruan and N Zhang ldquoEnhancedregenerative braking strategies for electric vehicle dynamicperformance and potential analysisrdquo Energies vol 10 p 18752017
[23] X Zhang K Wei X Yuan and Y Tang ldquoOptimal torquedistribution for the stability improvement of a four-wheeldistributed-driven electric vehicle using coordinated controlrdquoJournal of Computational and Nonlinear Dynamics vol 11no 5 2016
[24] L Guo X Lin P Ge Y Qiao L Xu and J Li ldquoTorquedistribution for electric vehicle with four in-wheel motors byconsidering energy optimization and dynamics performancerdquoin Proceedings of the IEEE Intelligent Vehicles Symposiumpp 1619ndash1624 Los Angeles CA USA June 2017
[25] F L Mapelli and D Tarsitano ldquoNew generation of electricvehicles [internet]rdquo Edited by Z Stevic Ed InTech LondonUK 2012
[26] Protean Protean Drive P18 2020 httpswwwproteanelectriccomtechnologyoverview
[27] L De Novellis A Sorniotti and P Gruber ldquoOptimal wheeltorque distribution for a four-wheel-drive fully electric ve-hiclerdquo SAE International Journal of Passenger Cars - Me-chanical Systems vol 6 no 1 pp 128ndash136 2013
[28] W Yaici L Kouchachvili E Entchev and M Longo ldquoPer-formance analysis of batterysupercapacitor hybrid energysource for the city electric buses and electric carsrdquo in Pro-ceedings of the 2020 IEEE International Conference on Envi-ronment and Electrical Engineering and 2020 IEEE Industrialand Commercial Power Systems Europe EEEICI and CPSEurope 2020 Madrid Spain June 2020
[29] S M Mousavi and G M Nikdel ldquoVarious battery models forvarious simulation studies and applicationsrdquo Renewable andSustainable Energy Reviews vol 32 pp 477ndash485 2014
[30] A Fotouhi D J Auger K Propp S Longo and M Wild ldquoAreview on electric vehicle battery modelling from lithium-ion
18 Mathematical Problems in Engineering
toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19

toward lithium-sulphurrdquo Renewable and Sustainable EnergyReviews vol 56 pp 1008ndash1021 2016
[31] A Damiano C Musio and I Marongiu ldquoExperimentalvalidation of a dynamic energy model of a battery electricvehiclerdquo in Proceedings of the 4th International Conference onRenewable Energy Research and applications Palermo ItalyNovember 2015
[32] UNECE ldquoUN regulation No 154ndashWorldwide harmonizedlight vehicles test procedure (WLTP)rdquo 2020 httpsuneceorgtransportdocuments202102standardsun-regulation-no-154-worldwide-harmonized-light-vehicles-test
[33] Regulation No 13-H of the Economic Commission for Europeof the United Nations (UNECE)mdashUniform ProvisionsConcerning the Approval of Passenger Cars with Regard toBraking [20152364]
[34] H B Pacejka ldquoTyre and vehicle dynamicsrdquo 2012[35] F Braghin and E Sabbioni ldquoA dynamic tire model for ABS
maneuver simulationsrdquo Tire Sci Technol vol 38 no 2pp 137ndash154 2010
Mathematical Problems in Engineering 19