Embed Size (px)
DESCRIPTION
slot combinations
Citation preview

1
Optimal Slot Numbers for Magnetic NoiseReduction in Variable-Speed Induction Motors
J. Le Besnerais, V. Lanfranchi, M. Hecquet, and P. Brochet,Member, IEEE
Abstract—Numerous empirical rules have been established inorder to rightly choose the number of stator and rotor slotsand limit the audible magnetic noise level radiated by inductionmachines. However, these rules never take into account the statornatural frequencies neither the fact that the motor is run atvariable speed.
In this article, a fast simulation tool of the variable-speedmagnetic noise emitted by induction machines, based on fullyanalytical models, is presented. On the ground of these models,the analytical expression of main magnetic vibrations due toslotting reluctance harmonics are derived and experimentallyvalidated, confirming the prime importance of slot combinationin magnetic noise radiation.
Some simulations are then run on a 700 W squirrel-cage motorin order to quantify the noise emitted by all possible combinationof slot numbers in two and three pole pairs cases, including oddslot numbers. The obtained database efficiently replaces the oldempirical rules on slot combination numbers and helps designingquiet induction motors. Similar database can be built for otherpower ranges.
Index Terms—Induction machine, magnetic noise, slot number,natural frequencies.
NOMENCLATURE
br Rotor slot opening widthbs Stator slot opening widthDr Rotor stack outer diameterDs Stator stack inner diameterfmax Maximum supply frequencyfn n-th circumferential mode natural frequencyfR Rotor mechanical frequency (fR = fs(1 − s)/p)fs Fundamental stator supply frequencym Spatial order of a force harmonicn n-th stator circumferential modep Number of pole pairsqs Number of stator phasess Fundamental slipZr Number of rotor slotsZs Number of stator slotsµ0 Air-gap magnetic permeability
I. I NTRODUCTION
Manuscript received the 15th of February, 2009. This work was supported inpart by the French Agence De l’Environnement et de la Maıtrise de l’Energie.
J. Le Besnerais is with the Laboratoire d’Electrotechniqueetd’Electronique de Puissance (L2EP), Ecole Centrale de Lille, FRANCE(e-mail:[email protected], website:http://l2ep.univ-lille1.fr/pagesperso/lebesnerais/).
V. Lanfranchi is with the LEC (Laboratoire d’Electromecanique deCompiegne), UTC, Compiegne, FRANCE (e-mail: [email protected]).
M. Hecquet and P. Brochet are also with the L2EP (e-mail:[email protected] and [email protected]).
T He strong vibro-acoustic influence of the slot numberscombination used in squirrel-cage induction machines
was experimented at the early beginning of the twentiethcentury. Consequently, some researchers started to look forsome general rules to decrease motor noise and vibrations thatmainly come from Maxwell air-gap magnetic forces. Some ofthe first rules were the ones of Kron [1] in 1908. During thefollowing decades, other attempts to infer some general rulesfrom the numerous experiments run on different motors weredone ; an exhaustive list of these laws can be found in Timarbook [2] in 1989 (for instance0.75Zs ≤ Zr < Zs).
Nevertheless, these rules have major drawbacks: firstly, theyare continuous although magnetic resonances come from dis-crete harmonic phenomena, as shown in section II ; secondly,they are independent of the motor natural frequencies andmotor maximal supply frequencyfs, which sizes the frequencyrange of magnetic exciting forces, so they cannot correctlyaccount for resonance phenomena ; finally, some of themare also based on the limitation of electromagnetic torquepulsations, whose correlation with the audible magnetic noisephenomenon has not been clearly demonstrated yet. Some newreliable design rules have therefore to be established on severalranges of stator mechanical structure and motor maximumspeed.
An exhaustive experimental study of rotor slot numberinfluence for Zs = 36, p = 2 and p = 3 has beencarried in [3], and compared to an analytical development ofMaxwell force harmonics. However, if the natural frequenciesof the motor are specified in the paper, their associated modeshapes are not mentioned and therefore not compared to theelectromagnetic force spatial orders. In addition, the analysisis carried at a fixed supply frequency (fs = 60 Hz), so itcannot take into account resonance effects that occur duringstarting. In [4] some noisy induction motors are sucessfullyredesigned by changing the slot numbers on the ground ofthe analytical expression of Maxwell force harmonics, butstill without considering the motor natural frequencies andthe variable-speed effects. Finally, in [5] the vibro-acousticbehavior of three different rotors is studied by finite elementmethod (FEM) and experiments, by correctly considering thevariable-speed factor and the spatial orders of the Maxwellforce. However, no general rule can be inferred from thesefew FEM computations, and they are too computationallygreedy to be used at the design stage of the motor to choosethe quietest slot numbers combinations. Finally, [6] made arecent exhaustive experimental study on the influence of slotnumbers on acoustic noise of two-speed induction machines,and proposes a list of low-noise rules of thumb without

2
any theoretical basis, without specifying what are the naturalfrequencies of the studied motor. Note that a similar issueis encountered in the field of switched reluctance machinesfor the choice of the stator and rotor numbers of poles [7],although some analytical models of the electromagnetic andvibro-acoustic behavior have been already established [8].
In this article is first detailed the phenomenon of audiblemagnetic noise generation. Then, a fully analytical modelof the induction machine electromagnetic and vibro-acousticbehavior, called DIVA [9], [10], is quickly presented. On theground of these models are detailed the analytical expressionsof the main magnetic vibration waves due to radial air-gapMaxwell forces linked with slotting harmonics, in terms ofrotation velocity and number of nodes. These expressionsare experimentally validated by visualizing a stator deflectionshape (Operational Deflection Shape) at some given frequen-cies. Finally, a simulation method is presented in order toestablish some new low-noise design rules for the slot numberscombinations. This method is applied to a 700 W, 10 cmexternal diameter squirrel-cage induction machine, and thebest slot numbers are given.
II. M AGNETIC NOISE PHENOMENON
Magnetic forces can be classified in magnetostrictive forcesand Maxwell forces. Magnetostrictive vibrations rather affectlow frequencies, and especially the component at twice thefundamental stator frequency where it can even be in counter-phase of Maxwell forces in two-pole machines [11], [12]. Theyare neglected in this paper that focuses on the reduction ofhigh-pitch acoustic noise due to Maxwell forces.
The global effect of Maxwell forces on the stator can bebrought to a Maxwell pressure distribution in the air-gap [13].This pressurePM is purely radial on stator teeth, it can beapproximated by [14], [2], [15]
PM = B2
g/(2µ0) (1)
where Bg is the radial air-gap flux density. Assumingthat the rotor is not skewed, and neglecting end-effects, thisforce distribution is independent of the axial direction andcan therefore only excite some circumferential modes of thestator, which can be modeled by an equivalent ring as a firstapproximation [2], [16]. Each of these circumferential modesis associated to a number (n = 0, 1, 2, 3, 4, ...) and a naturalfrequencyfn (see example ofn = 2 in Fig. 1).
Fig. 1. Example of the elliptical circumferential mode (n = 2) of acylindrical shell (structural finite element method).
Fig. 2. Example of a 2-order (m = 2) rotating force wave coming from theFourier series development of radial air-gap Maxwell forces distribution. Thefundamental difference with the deflection shape of the stator elliptical modein Fig. 1 is the fact that the exciting force nodes are rotating, whereas themode deflection nodes are steady, fixed according to the maximal stiffnesspoints of the structure.
Developing the magnetic pressure (1) in two-dimensionalFourier series, it can be expressed as an infinite sum of pro-gressive force waves of time frequencyf and space frequencym:
PM (t, αs) =∑
m,f
Amf cos(2πft − mαs + φmf ) (2)
m is also called a spatial order, it corresponds to half thenumber of nodes i.e. zero magnitude points (see Fig. 2 examplefor m = 2 where there are four nodes). Note that such a forcewave do not rotate atf frequency, but atf/m frequency.
A magnetic resonance, i.e. large vibration and acousticlevels, can then occur at two conditions as analytically provenin [17]:
1) the orderm of the force wave must be the same asthe circumferential mode numbern of the stator ring(m = n)
2) the frequency of the force wave must be the same as thefrequency of the natural frequency of the stator modeunder consideration (f = fn)
In variable-speed motors, the frequency match condition 2)is more easily satisfied as the frequencies of magnetic forcesdue to fundamental current vary proportionally to the supplyfrequencyfs, and therefore sweep a wide frequency rangeduring starting and braking. There is an infinite number offorce harmonics, but the magnitude of the vibration waves thatthey generate are inversely proportional tom4 [15], so onlythe lowest spatial orders forces lead to significant vibrationand noise (0 to 4 for induction motors up to several hundredsof kW).
III. M AGNETIC NOISE PREDICTION
A. Electromagnetic model
In order to predict magnetic noise resonances, one musttherefore analytically calculate the Fourier developmentofPM . This requires an analytical model of the air-gap radial fluxdensity distribution, for instance a permeance / magnetomotiveforce (mmf) decomposition [18]. Neglecting the rotor mmf thatis generally much lower than stator mmf and do not introducenew noisy resonances [19], this decomposition can be writtenas [20]
Bg = Λfsmm =
µ0
gffs
mm (3)

3
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Angle (rad)
Fig. 3. Cs function marking the location of stator slot openings alongtheair-gap.
where gf is the air-gap ”fictitious width”, i.e. the meanlength of flux density lines along the air-gap, andfs
mm is thestator magnetomotive force (mmf). Considering that the statormmf is nearly sinusoidal, only the Fourier series of permeancemust be determined. This can be done approximating it by acrenel function, assuming that a fixed valuedf
s anddfr for the
mean flux line length entering into stator and rotor slots. Thisway, gf can be written as
gf (t, αs) = g + dfsCs(αs) + df
r Cr(t, αs) (4)
whereCs andCr are boolean functions that mark the statorand rotor slot openings locations (see Fig. 3). [21] expressesfictitious depths that are proportional to slot openings (df
s =bs/5 and df
r = br/5). Note that these fictitious slot depthsdo not depend on the real slot depth, but on the slot openingwidth, and for closed rotor slotsdf
r = 0.Now that the permeance function is fully defined, it can be
developed in Fourier series in order to express all Maxwellforce harmonics. Its Fourier development gives [21]:
Λ = Λ0 +
∞∑
ks=1
Λks cos(ksZsαs)
+
∞∑
kr=1
Λkr cos (krZr(αs − αr))
+1
2
∞∑
ks=1
∞∑
kr=1
Λkskr{cos((ksZs − krZr)αs + krZrαr)
+ cos((ksZs + krZr)αs − krZrαr)} (5)
whereαr stands for a rotor bar angular position:
αr(t) =2πfs
p(1 − s)t = 2πfRt (6)
The detailed expression of coefficientsΛ0, Λks , Λkr andΛkskr can be found in [21], [10].Λks/r
are inversely pro-portional toks/r , so the higherkr and ks are, the lower aretheir associated permeance harmonics. Another important factis thatΛkskr is much smaller thanΛks/r
, so it will be neglectedin this paper. Note that it cannot be neglected when consideringsaturation effect on noise [22].
Now that the full Fourier development of permeance func-tion has been determined, one can easily find the expressionof all the air-gap radial flux density harmonics, and then
Maxwell force harmonics resulting from all possible combina-tions of flux density harmonics. This gives numerous pressurewaves whose exhaustive list can be found in [19]. However,only the lowest spatial order ones can generate significantvibrations and noise [15], [23], and some of them have verylow magnitude as they come from the multiplication of lowmagnitude harmonics. Neglecting them, one obtains the mainforce harmonics given in Table I.
TABLE IPURE SLOTTING FORCE LINES EXPRESSION.
Frequencyf Spatial orderm
F−
slotfs(krZr(1 − s)/p − 2) krZr − ksZs − 2p
F 0slot
fs(krZr(1 − s)/p) krZr − ksZs
F+
slotfs(krZr(1 − s)/p + 2) krZr − ksZs + 2p
They can be grouped in three infinite families. They cor-respond to Maxwell harmonics due to permeance fluctuationsalong the air-gap (slotting effect) when feeding the machinewith sinusoidal currents: they theoretically cancel if rotor orstator slots are fully closed. These forces remain unchangedwhen feeding the induction machine with Pulse-Width Mod-ulation (PWM).
In Table I, it is clear thatZr andZs have a strong influenceon magnetic noise:Zs andZr change the spatial orders of theexciting force harmonics, andZr changes their frequencies.Zr is therefore a degree of freedom with higher impact thanZs, which goes in the right sense as it is less expensiveto manufacture a new squirrel-cage rotor than a stator thatrequires rewinding the machine.
We can also see that the phenomenon is discrete: if agiven (Zr, Zs) combination can lead to a low orderm forceharmonic with very high magnitude (e.g.kr = ks = 1), avery slight change ofZr can make this low order harmonicdisappear or have a very low magnitude.
B. Vibro-acoustic model
The vibro-acoustic model approximates the stator as anequivalent ring, so its static deflections and circumferentialmodes natural frequenciesfn can be analytically expressed.The dynamic behavior of the stator structure is modeled usingan empirical law for damping coefficients [16]. The acousticpower is then computed using the expression of the radiationfactor of an infinite cylinder or a sphere according to the statordimensions [24].
A more detailed description of this model can be found in[19], [10].
C. Validation
The model has been validated at different stages (fluxdensity, vibration, sound power level) by numerical methodsand/or tests [9], [19], [10], [25], [26].
The natural frequencies computation has been validated withfinite element method (FEM), and hammer shock experimentalmodal analysis [10]. These validation results are recalledinTable II.

4
TABLE IISTATOR NATURAL FREQUENCIESfn COMPUTATION (HZ) USING
DIFFERENT METHODS. OR: OUT OF RANGE, ID: I NDEFINITE.
n 2-D FEM Hammer shock DIVA
0 14656 OR 148591 ID 1200 12342 2364 2400 24853 6473 6100 64154 11898 11700 12065
The expressions of modes and frequencies of Table I havebeen validated experimentally by visualizing some stator de-flection shapes at different frequencies. Some accelerometershave been placed along the outer median circumference ofthe stator stack, and the acceleration signals have been post-processed in Pulse LabshopR© software. Test-bench motorparameters are given in Table III.
TABLE IIIMOTOR PARAMETERS.
Number of pole pairsp 2Number of stator slotsZs 27Number of rotor slotsZr 21Output nominal power (W) 700Maximum supply frequency (Hz) 90Stator stack outer diameter (mm) 204Stator stack inner diameter (mm) 63Stator stack length (mm) 80Airgap width (mm) 0.2
As an example, we can see that forkr = 5 and ks = 4,a Maxwell force harmonic with mode5 × 21 − 4 × 27 =−3 occurs at frequencyfs(105(1 − s)/2); in agreement withanalytical predictions, the operational deflection shape of thestator at this frequency is a rotating vibration wave of order 3as shown in Fig. 4.
Fig. 4. Experimental stator deflection shape at two successive moments atfrequencyfs(105(1 − s)/2).
IV. M AGNETIC NOISE REDUCTION
A. Low-noise analytical rule
In order to avoid resonances between slotting magneticforces of Table I and circumferential modes of the stator duringstarting (the stator supply frequency going from 0 tofmax Hz),the following condition must be fulfilled:
fmax(krZr(1−s)/p+2γ) < fn, n = |krZr−ksZs+γ2p| (7)
for γ ∈ [−1, 0, 1], especially whenn is low (0 to 4)and kr and ks are low (1 to 5). The slot numbers can bechosen according to this rule, with the help of a simplecomputer program. However, how can the designer choosebetween a(Zr, Zs) solution generating small but numerousresonances, and a(Zr, Zs) solution generating a strong butsingle resonance ? To quantitatively classify all the possiblesolutions in term of acoustic noise, simulation is thereforenecessary.
B. Low-noise slot combination database
The analytical model that has been described in sectionIII gives a fast MatlabR© simulation tool called DIVA thatcan compute the motor magnetic sound power level in onlya few seconds on a 2 GHz laptop. All the slot numbercombinations can exhaustively be tested at variable-speedin order to establish a low-noise slot combination database,instead of trying to define general analytical rules.
On the ground of the test motor described in Table III,some virtual four-pole motors with all possible combinationsof Zs and Zr from 10 to 50, including odd slot numbers,have been run from 0 to 2700 rpm. AsZs values are notalways proportional to2pqs, this applies to both integral andfractional-slot stator windings. These motors were simulatedwith sinusoidal supply and sinusoidal mmf in order to simulatepure slotting noise as defined in Table I.
In all cases, the stator current has been forced to the samevalue, in order to have a magnetic excitation of constantmagnitude. However, slotting permeance harmonics magnitudealso depends on slotting ratiosslr/s [21] defined as
sls = 1 −bs
τsslr = 1 −
br
τr(8)
where
τs = πDs/Zs τr = πDr/Zr (9)
To keep these slotting ratios constant when changing thenumber of stator and rotor slots, the productsZrbr andZsbs
have also been forced to be constant (otherwise, increasingthe number of slots would have reduced the slot openings,and reduced the magnetic force lines magnitude). This way,the computed noise levels only reflect the resonances effectof the slot combination, and this independently of the slotsgeometry and winding type. Such a methodology allows todistinguishing low-noise guidelines applying to the slot combi-nation numbers from the ones applying to the slot geometries.
The resulting database is a 50 by 50 table that containsthe maximum and the average magnetic noise level radiatedby each motor during starting phase. Some more data hasbeen recorded during simulations, such as the number ofresonances, and the excited stator circumferential modes foreach slot combination.
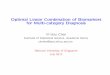
An example of the database obtained for test motor isdisplayed in Fig. 5 forZs = 36, p = 2. In that figure, one can

5
10 15 20 25 30 35 40 45 50
30
40
50
60
70
80
90
100
110
120Zs=36
Zr
Sim
ulat
ed n
oise
(dB
A)
Lw max (dBA)Lw mean (dBA)mode 0mode 1mode 2mode 4order 2 saturation
Fig. 5. Evolution of aZs = 36 stator-slot motor magnetic sound powerlevel (average and maximum levels during starting) in function of the numberof rotor slotsZr.
see that the noise level greatly changes with the number ofrotor slots: the phenomenon is discrete, for instance changingfrom 38 or 39 toZr = 40 rotor slots completely changesthe noise level. Some other information has been recordedduring simulations, and illustrated in Fig. 5. For instance, theparticipation of each stator mode to the global noise levelshows thatZr = 38 is noisy because it excites the statorelliptical mode (n = 2). Similarly, it can be observed thatmode number 1 is only excited when the rotor slot number isodd, which is clear from Table I. Finally, some informationon noise due to saturation has been also displayed: saturationmodifies the radial air-gap flux density shape, adding newharmonics that can generate additional resonances [22]. Thiseffect has not been included in simulations because this workaims at studying the effect of slot numbers combination onnoise and vibrations independently of the slot shapes that sizethe magnitude of the exciting slotting force harmonics, aswell as saturation force harmonics. Some slot combinationscan create some saturation harmonics of order 2, which areespecially dangerous when they excite the stator ellipticalmode: these slot combinations have been indicated by a dashedline in Fig. 5 so that the designer keeps in mind that this kindof combination can possibly lead to strong resonances due tosaturation.
The full 250 element table obtained with these simulationscannot be shown in this paper, so the quietest combinationshave been selected and are presented in Table IV. They havebeen classified for each given stator slot number, becausethe squirrel-cage rotor is more easily manufactured than thestator that comprises winding. The rotor slot numbers arepresented by increasing noise order, but this classification israther subjective, especially because two different objectivesare considered at the same time (average and maximumnoise during starting): a weight must be fixed between bothobjectives to quantitatively and objectively sort them. Itistherefore advised to refer to the full version of this workin [19]. In this Table, the combinationZr = Zs has beenremoved, although it systematically belongs to the quietestones, because it creates high synchronous parasite torques[27]. Other combinations are unrealistic (e.g. whenZr ≫ Zs),but they are all shown so that some general rules on acoustic
noise can be inferred more easily.Several important conclusions can be drawn from these
simulations. Firstly, whatever the parity ofZs, there exist somequiet combinations with both even and oddZr. Secondly,some combinations are clearly less noisy than others: it isthe case ofZs that are multiples of 4, withZr also multiplesof 4. Indeed ifZs = 2pqs and Zr = 2pqr, the slotting forceharmonics have spatial orders of the form
krZr − ksZs + γ2p = 2p(krqr − ksqs + γ) (10)
As a consequence, forp = 2, they have orders 0, 4, 8 etc:slotting forces cannot excite the most dangerous stator mode,the elliptical one.
Note that Table IV results must be used with special care:it does not account for saturation effects, nor slot geometryinfluence, and it is only valid for four-pole motors whosenatural frequencies are close to ones of Table II, and whosemaximal supply frequency during starting is close to 90 Hz.
Ideally, the designer should first choose the slot numbersusing a similar study as this one in order to avoid strongmagnetic noise and vibrations due to slotting harmonics. Heshould then check if the slot combination does not create otherstrong vibrations due to saturation [22]. Finally, he shouldchoose the slot opening widths in order to cancel the identifiedexciting force harmonics that are left according to [28].
V. CONCLUSION
The phenomenon of magnetic noise and vibrations due toslotting harmonics has been analytically demonstrated, aswellas the strong influence of rotor and stator slot numbers. Ananalytical rule to avoid magnetic noise has been established,but it is rather hard to be used for practical purposes byengineers.
A fully analytical model of an induction machine vibro-acoustic behavior has been therefore presented. On the groundof this model that has been validated at different stages, severalsimulations have been run in order to exhaustively explorethe slot numbers combination impact on variable-speed noise.These simulations have been run with special care, so resultsonly reflect the effect of slot numbers on noise, independentlyof the slot geometries.
From these simulations, some low-noise combinations havebeen clearly established on a 700 W induction machine. Theseresults can be easily used by designers for motors with similarnatural frequencies.
REFERENCES
[1] G. Kron, “Induction motor slot combinations: rules to predeterminecrawling vibration, noise and hooks in the speed-torque curve,” AIEETransactions, vol. 50, 1931.
[2] P. Timar, Noise and vibration of electrical machines. Elsever, 1989.[3] I. Hirotsuka, K. Tsuboi, and F. Ishibashi, “Effet of slot-combination
on electromagnetic vibration of squirrel-cage induction motor underloaded condition,”IEEE Proceedings of Power Conversion Conferance-Nagaoka’97, 1997.
[4] K. Huang, Z. Liu, H. Li, J. Yang, D. Turner, L. Jiang, and Q.Wu,“Reduction of electromagnetic noise in three-phase induction motors,”in IEEE Proc. of the International Conference on Power System Tech-nology, 2002.

6
TABLE IVQUIETEST SLOT COMBINATIONS FOR TEST MOTOR(IN INCREASING NOISE
LEVEL ORDER).
Zs Zr
10 40, 20, 30, 50, 15, 2511 22, 33, 44, 42, 46, 2112 48, 16, 20, 32, 24, 28, 36, 40, 4413 39, 15, 43, 35, 48, 50, 4914 21, 42, 28, 35, 4915 30, 45, 13, 4116 12, 20, 24, 28, 32, 36, 40, 44, 4817 34, 15, 19, 47, 3818 27, 36, 45, 47, 1619 38, 25, 34, 2220 12, 16, 32, 24, 28, 36, 44, 48, 4021 42, 14, 28, 3522 11, 25, 19, 35, 31, 4423 50, 27, 30, 1924 12, 16, 20, 32, 28, 44, 40, 36, 4825 32, 21, 33, 29, 46, 4426 13, 3927 18, 36, 45, 50, 37, 3128 12, 16, 20, 24, 32, 36, 40, 44, 4829 25, 33, 18, 23, 4030 15, 10, 45, 43, 41, 2031 41, 27, 25, 50, 3532 28, 12, 36, 20, 16, 24, 40, 44, 4833 11, 27, 37, 29, 43, 4634 17, 19, 15, 49, 45, 30, 3835 13, 21, 28, 39, 47, 49, 4236 48, 16, 12, 20, 32, 40, 24, 28, 4437 33, 30, 31, 11, 49, 5038 19, 31, 42, 17, 34, 5039 13, 26, 35, 43, 31, 5040 12, 32, 16, 44, 24, 36, 28, 20, 4841 33, 35, 15, 45, 49, 3242 21, 14, 28, 49, 3543 25, 30, 47, 35, 39, 13, 1544 12, 16, 36, 20, 48, 28, 32, 24, 4045 15, 27, 18, 36, 30, 4946 21, 37, 25, 50, 39, 1347 29, 43, 17, 39, 18, 30, 4148 12, 20, 16, 40, 28, 36, 44, 32, 2449 14, 21, 42, 39, 28, 35, 4150 40, 41, 31, 23, 20, 44, 28
[5] T. Kobayashi, F. Tajima, M. Ito, and S. Shibukawa, “Effects of slotcombination on acoustic noise from induction motors,”IEEE Trans. onMag., vol. 33, no. 2, 1997.
[6] I. Peter and G. Scutaru, “The magnetic noise of three-phase induc-tion motors with squirrel cage rotors,” inProceesing of the the 11thInternational Conference on Optimization of Electrical and ElectronicEquipment (OPTIM), (Brasov), pp. 63–68, May 2008.
[7] J. Li, X. Song, and Y. Cho, “Comparison of 12/8 and 6/4 switchedreluctance motor: Noise and vibration aspects,”IEEE Trans. on Mag.,vol. 44, pp. 4131 – 4134, Nov. 2008.
[8] M. Anwar and I. Hussain, “Radial force calculation and acoustic noiseprediction in switched reluctance machines,”IEEE Trans. on Ind. App.,vol. 36, no. 6, pp. 1589–1597, 2000.
[9] J. Le Besnerais, A. Fasquelle, M. Hecquet, V. Lanfranchi, P. Brochet, andA. Randria, “A fast noise-predictive multiphysical model of the PWM-controlled induction machine,” inProc. of the International Conferenceon Electrical Machines (ICEM’06), (Chania, Greece), July 2006.
[10] J. Le Besnerais, V. Lanfranchi, M. Hecquet, P. Brochet,and G. Friedrich,“Acoustic noise of electromagnetic origin in a fractional-slot inductionmachine,”COMPEL, vol. 27, pp. 1033 – 1052, Feb. 2008.
[11] A. Belhacen, “Vibrations of rotating electrical machines due to magneto-mechanical coupling and magnetostriction,”IEEE Trans. on Magnetics,vol. 42, Apr. 2006.
[12] T. Hilgert, A. Vandevelde, and J. Melkebeek, “Numerical analysis of thecontribution of magnetic forces and magnetostriction to the vibrationsin induction machines,”IET Sci. Meas. Technol., vol. 1, no. 1, 2007.
[13] A. Belahcen,Magnetoelasticity, magnetic forces and magnetostriction
in electrical machines. PhD thesis, Helsinki University of Technology,Finland, Aug. 2004.
[14] P. Alger, Induction machines : their behaviour and uses. Gordon andBreach Science Publishers, 1970.
[15] H. Jordan,Electric motor silencer - formation and elimination of thenoises in the electric motors. W. Giradet-Essen editor, 1950.
[16] S. J. Yang,Low noise electrical motors. Oxford: Clarendon Press, 1981.[17] W. Soedel,Vibrations of shells and plates. Marcel Dekker, 1993.[18] S. Verma and A. Balan, “Determination of radial-forcesin relation to
noise and vibration problems of squirrel-cage induction motors,” IEEETrans. on En. Conv., vol. 9, pp. 404–412, June 1994.
[19] J. Le Besnerais,Reduction of magnetic noise in PWM-supplied inductionmachines − low-noise design rules and multi-objective optimisation.PhD thesis, Ecole Centrale de Lille, France, Nov. 2008.
[20] G. Bossio, C. D. Angelo, J. Solsona, G. Garcia, and M. Valla, “A 2-Dmodel of the induction machine: an extension of the modified windingfunction approach,”IEEE Trans. on Energy Conversion, vol. 19, pp. 62–67, Mar. 2004.
[21] J. Brudny, “Modelisation de la denture des machines asynchrones :phenomenes de resonances,”Journal of Physics III, vol. 37, no. 7,pp. 1009–1023, 1997.
[22] J. Le Besnerais, V. Lanfranchi, M. Hecquet, G. Lemaire,E. Augis, andP. Brochet, “Charaterization and reduction of magnetic noise due tosaturation in induction machines,”IEEE Trans. on Mag. Accepted forpublication.
[23] C. Schlensok, D. van Riesen, M. van der Giet, and K. Hameyer,“Deformation analysis of induction machines by means of analyticaland numerical methods,”IEEE Trans. on Mag., vol. 44, pp. 1498 –1501, June 2008.
[24] P. Timar and J. Lai, “Acoustic noise of electromagneticorigin in anideal frequency-converter-driven induction motor,”IEE Proc. on Electr.Power Appl., vol. 141, pp. 341–346, Nov. 1994.
[25] J. Le Besnerais, V. Lanfranchi, M. Hecquet, P. Brochet,and G. Friedrich,“Characterisation of the radial vibration force and vibration behaviourof a PWM-fed fractional-slot induction machine,”IET Electric PowerApplications, Feb. 2009.
[26] J. Le Besnerais, V. Lanfranchi, M. Hecquet, and P. Brochet, “Char-acterization of the audible magnetic noise emitted by traction motorsin railway rolling stock,” in Proc. of the INTERNOISE conference,(Shanghai, China), Oct. 2008.
[27] I. Boldea and S. A. Nasar,The induction machine handbook. CRC Press,2002.
[28] J. Le Besnerais, V. Lanfranchi, M. Hecquet, R. Romary, and P. Brochet,“Optimal slot opening width for magnetic noise reduction ininductionmotors,” IEEE Trans. on En. Conv., 2009. Accepted for publication.