Embed Size (px)
Citation preview

Research ArticleOptimal Piezoelectric Actuators and SensorsConfiguration for Vibration Suppression ofAircraft Framework Using Particle Swarm Algorithm
Quanzhen Huang12 Suxia Chen3 Huayan Pu2 and Ning Zhang1
1School of Electrical Information Engineering Henan Institute of Engineering Henan 451191 China2School of Mechatronics Engineering and Automation Shanghai University Shanghai 200072 China3School of Computer Henan Institute of Engineering Henan 451191 China
Correspondence should be addressed to Huayan Pu phygood 2001shueducn
Received 6 February 2017 Revised 16 April 2017 Accepted 27 April 2017 Published 15 June 2017
Academic Editor Xiao-Qiao He
Copyright copy 2017 Quanzhen Huang et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Numbers and locations of sensors and actuators play an important role in cost and control performance for active vibration controlsystem of piezoelectric smart structure This may lead to a diverse control system if sensors and actuators were not configuredproperly An optimal location method of piezoelectric actuators and sensors is proposed in this paper based on particle swarmalgorithm (PSA) Due to the complexity of the frame structure it can be taken as a combination of many piezoelectric intelligentbeams and L-type structures Firstly an optimal criterion of sensors and actuators is proposed with an optimal objective functionSecondly each order natural frequency and modal strain are calculated and substituted into the optimal objective functionPreliminary optimal allocation is done using the particle swarm algorithm based on the similar optimization method and thecombination of the vibration stress and strain distribution at the lower modal frequency Finally the optimal location is givenAn experimental platform was established and the experimental results indirectly verified the feasibility and effectiveness of theproposed method
1 Introduction
Numbers and locations of piezoelectric sensors and actuatorsare of great significance for piezoelectric smart structurevibration control performance system implementation costsand so on [1 2]
There are a few problems for configurations of sensors oractuators in the progress of promoting the engineering appli-cation When they are placed at improper locations this willlead to much more uncontrolled modal response messagesin sensor signals and actuators may inspire uncontrolledmodal responses which will make observation or controlspillover or even make the control system unstable In fact itis an optimization problem to determine the best locations ofsensors and actuators And many scholars have made someprofound studies on this issue These studies can be splitinto two on the one hand those that determine the optimal
allocation criterion namely optimizing objective functionOn the other hand those that choose the appropriate opti-mization methods For example Caruso et al [3] aimedat maximizing the modal controllability and observabilityof the structure and the locations of piezoelectric patcheswith a fixed size were optimized Kumar and Narayanan[4 5] worked out the optimal location of sensor-actuatorpairs which were placed in the piezoelectric cantilever plateon the basis of a linear quadratic regulator (LQR) TheLQR performance index was used as the objective functionof the optimization progress which was solved by geneticalgorithm (GA) Rao et al [6] proposed particle swarm basedevolutionary optimization technique for optimal placementof piezoelectric patch actuators and accelerometer sensors tosuppress vibrationViswamurthy andGanguli [7 8] proposeda response surface based optimization method for actuatorand sensor placement Manning [9] proposed a two-stage
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 7213125 11 pageshttpsdoiorg10115520177213125
2 Mathematical Problems in Engineering
optimization strategy for active member placement and strutcross section and compensator parameter optimization forintelligent trusses T-W Kim and J-H Kim [10] optimizedthe placement of the piezoelectric path of the flexible platesby applying the sequential quadratic programming methodGao [11] investigated integrated optimization of the actua-tor location and feedback gain in PZT smart trusses withstochastic structural parameters using a two-step optimiza-tion strategy Xian [12] combined a layered strategy and anapproximation concept and formed a two-level branchedand multipoint approximation strategy for adaptive trussactuator placement optimization Liu and Lin [13] took a two-level optimization method based on a simulated annealingalgorithm to determine the optimal channel distribution andthe optimal channel voltage for dynamic shape control ofstructures using piezoelectric materials Honda et al [14]employed the placement of piezoelectric actuators the lay-up configurations of laminated composite plates and the H2vibration control system as design variables and optimizedthem simultaneously by GA Dutta et al [15] consideredartificial bee colony and glowworm swarm optimizationalgorithms to find the optimal locations of actuatorssensorsand feedback gains of a cantilevered beam
A piezoelectric aluminum alloy smart frame structure istaken as an experimental model in this paper Since the struc-tural shape and constraints are complex the entire frameworkis taken as a combination of a plurality of piezoelectric intel-ligent beams and L-shaped structures Firstly piezoelectriccantilever is taken as a structural vibration control objectOptimization objective function is established according tocontrollability and observability criteria of system Configu-ration of sensors and actuators is optimized by particle swarmalgorithm Secondly according to the above optimizationprocess and the analysis results by ANSYS the final optimalconfiguration is obtained An experimental platform wasestablished and the experimental results indirectly verifiedthe feasibility and effectiveness of the proposed method
2 Optimization Principle of the PiezoelectricSensors and Actuators
According to Ahari [16] the Partial Differential Equation(PDE) of the cantilever beam which is made of aluminumalloy can be described as follows
119865 (119901 119905) = 119872(119901) 1205972119908 (119901 119905)1205971199052+ 2120577 [119872 (119901) 119871]12 [120597119908 (119901 119905)120597119905 ]+ 119871 [119908 (119901 119905)]
(1)
Here 119865(119901 119905) is the distribution of external force 119908(119901 119905)is deflection of beam which is a function of a space variable119901 isin 119863 and time 119905 119871 is the hardness distribution of the systemwhich is a partial differential function about a relative spacecoordinate 119901 and 119872(119901) is a mass density function whichis a positive definite function about the location of 119901 Here119872(119901) = 1 119871[119908(119901 119905)] = (119864119868120588119860)(12059741205971199094)
The principle for the distribution of the actuators shouldensure its influence on the structural perturbation to thegreatest degree In other words the actuator should transportthe energy as large as possible to the structural modeAccording to this principle the criteria for the optimizationof the actuators are [17]
1199001199011199111015840 = 2( 119899sum119894=1
119864119894) 119899radic 119899prod119894=1
119864119894 (2)
119864119894 is mathematical expectation of the ith modal totalenergy It can be considered as two parts the first part isabout the total energy of the system Generally speakingsome low modal energy is chosen on the basis that modalenergy reduces sharply along with the increasing of modalnumbers the other part is considered as the volume of anellipsoid The ellipsoid is n-dimensional and its radius isdirectly proportional to each modal energy
As the size of the diagonal elements of observabilityGramian is directly proportional to the stability of the systemthe criteria of the optimal sensor placement are
1199001199011199111015840 = ( 2119899sum119869=1
120582119869) 2119899radic 2119899prod119869=1
(120582119869) (3)
120582119869 is the eigenvalue of observability Gramian The eigen-value is fundamentally the same as that of controllabilityGramian for some small damping structural system so itis the best situation for the same numbers and positions ofsensor and actuator
3 SensorActuator Optimization AlgorithmBased on Particle Swarm
31 Establishment of Optimization Objective Function Basedon the position optimization guidelines in Section 2 it canbe seen that the controllability Gramian gives the relevanceof system state and the output and the observability Gramiangives the relevance of the system state and input But thesematrices and eigenvalues are taken depending on the statevector if the state vector changes the above will not beestablished The above guidelines also show that the vectorsof the controllability and observability Gramian are relatedto optimization configuration criteria and the controllabilityand observability Gramian are respectively related to matri-ces B and C so matrices B and C are respectively related tothe positions of the actuator and sensor
Therefore the optimization criterion is to seek the bestposition to make features of the controllability and observ-ability Gramian optimal To this end establish the followingbest guidelines when its mathematical value is small thesystem is not controllable or not considerable when themathematical value is large the system is controlled orconsiderable The value is maximum and it is the bestlocation
Before setting the optimal objective function the observ-ability matrix 119882obs and the controllability matrix 119882con are
Mathematical Problems in Engineering 3
Table 1 The relevant parameters of sensorsactuators
Type Length(mm)
Width(mm)
Thickness(mm)
Couplingcoefficient119870119901
Piezoelectricconstant11988931
Bulk densityP (103 kgm3)
P-51 20 6 04 062 186 76PZT-5H 40 8 1 068 275 75
respectively obtained by the expression between Gramianmatrix and the system modal energy [18]
119882obs = diag( 1198881198994120585119894119908119894 1198881198994120585119894119908119894) 119894 = 1 2 119899119882con = diag( 1205731198994120577119894119908119894 1205731198994120577119894119908119894) 119894 = 1 2 119899 (4)
Here 120585 is the extraneous signal 120577 is the control signal and119908 is the deflection of beamIf the natural frequency distribution of structural vibra-
tion system is well and the damping coefficient is small theoptimal objective function is given as follows
Obj = trace (119882) 2119899radicdet (119882)120590 (120582119894) (5)
where119882 is Gramianmatrix its value is119882obs or119882con 120590(120582119894) isstandard deviation for the eigenvalues 120582119894 of Gramian matrix119882 2119899radicdet(119882) is the geometric mean of the eigenvalues itsphysical significance is the volume of the ellipse 119899 is thecoefficient of freedom degree 120590(120582119894) is the location mainlyavoiding both great and small eigenvalues and trace(119882) isthe output energy of the actuator119882 can be expressed as each order modal energy ormodal value maximum and minimum values of trace(119882)2119899radicdet(119882) and 1120590(120582119894) have synchronization And trace(119882)may represent sum of each modal energy a small value canbe ignored during the total sum so that it can be expressed assum of lower modal energies 2119899radicdet(119882) can be expressed asproduct of the modal energies as we all know that each playsa role in the product operation it means that all modals arefunctioning also taking into account higher-order modalsTherefore this criterion well considers each order modal itwill be very effective to optimize the configuration for thesensoractuator
32 Process and Analysis of PSO According to the char-acteristics analysis of piezoelectric aluminum alloy beamstructure optimization objective function is obtained forthe piezoelectric sensor and actuator As in literature [2]on the basis of finite element modeling it is studied onthe actuator position optimization of dimensional flexibleplate using controlled Gramian matrix In the process ofposition optimization using controllability and observabilityGramian each iterationrsquos calculations need to solve Lyapunovequations its computation will see a sharp rise when the
system has a large degree of freedom or many actuators needto be position-optimized resulting in a very long computingtime Thus in order to avoid complex calculations particleswarm algorithm was proposed in this paper to optimizethe objective function to achieve advantages of high com-putational efficiency fast convergence and being simple andversatile
Optimization process of piezoelectric sensoractuator byparticle swarm algorithm broadly is divided into severalsteps
(1) First establish kinetic equations according to opti-mization object expressions of each orderrsquos naturalfrequencies and modal strain are obtained
(2) Carry out modal strain analysis and get each orderrsquosnatural frequencies modal shapes and modal stressdistribution
(3) The given modal values and the natural frequencyare converted to the needed form of the objectivefunction optimization and then are substituted intothe objective function the position based on particleswarm algorithm is optimized and ultimately anoptimal layout plan of piezoelectric sensoractuator isgiven
321 Modal Analysis of Smart Piezoelectric Beams Sinceit is more complex to analyze directly piezoelectric framestructure modal in order to more clearly describe theoptimization methods in the paper the constituent units ofthe piezoelectric frame structure (ie piezoelectric beam) aredirectly analyzedThematerial of the framework is aluminumalloy and its related parameters are as follows length 119897 =1500mm width 119887 = 20mm height ℎ = 5mm density120588 = 2700 kgm3 Youngrsquos modulus 119864119901 = 70 times 1010 Pa andPoissonrsquos ratio ] = 033 Material type of piezoelectric sensorsis P-51 material type of piezoelectric actuator is PZT-5H andits parameters are shown in Table 1 [19]
Suppose piezoelectric beam elements are the idealstate according to (1) combining with the actual situationdescribed above the dynamic equations and boundary con-ditions of aluminum beam are obtained as follows
119864119868120588119860 1205974119910 (119909 119905)1205971199094 + 2120577radic 119864119868120588119860 [120597
3119910 (119909 119905)1205971199092120597119905 ] + 1205972119910 (119909 119905)1205971199052
= 1120588119860119875sum119897=1
120575 (119909 minus 119909119897) 119891119897 (119905) (6)
4 Mathematical Problems in Engineering
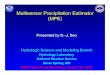
(a) The first order (b) The second order
(c) The third order
Figure 1 The first 3 vibration modal diagrams
where119864 is a modal amount and 119868 is a cross-section secondarydistance it can be converted to the form of the generalsolution
119910 (119909) = 1198621sin (120573119909) + 1198622cos (120573119909)+ 1198623sinh (120573119909) + 1198624cosh (120573119909) (7)
119910 (119909 119905)1003816100381610038161003816119909=0 = 0120597119910 (119909 119905)12059711990910038161003816100381610038161003816100381610038161003816119909=0 = 0
(8)
1198641198681205972119910 (119909 119905)1205971199092100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
1198641198681205973119910 (119909 119905)1205971199093100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
(9)
Equations (8) and (9) are respectively geometric bound-ary conditions of fixed end and the force boundary conditionsof the free end it can be obtained by the two equations
1198621 = minus11986231198622 = minus11986241198621 [cos (120573119897) + ch (120573119897)] + 1198622 [sin (120573119897) + sh (120573119897)] = 0minus 1198621 [sin (120573119897) minus sh (120573119897)] + 1198622 [cos (120573119897) + ch (120573119897)] = 0
(10)
Conditions of the nontrivial solution for1198621 and1198622 in (10)are as follows1003816100381610038161003816100381610038161003816100381610038161003816
cos (120573119897) + ch (120573119897) sin (120573119897) + sh (120573119897)minussin (120573119897) + sh (120573119897) cos (120573119897) + ch (120573119897)1003816100381610038161003816100381610038161003816100381610038161003816 = 0 (11)
Expanding from (11) we can obtain
cos (120573119897) ch (120573119897) + 1 = 0 (12)
The solution for (12) is
1205731119897 = 18751205732119897 = 46941205733119897 = 7855
Table 2 The first 6 natural frequencies of piezoelectric aluminumbeams
Mode 1 2 3 4 5 6Naturalfrequency (Hz) 29518 34851 95873 178932 200689 253306
1205734119897 = 109961205735119897 = 14137
120573119899119897 asymp ((2119899 minus 1)2 ) 120587
(13)
Its natural frequency of each order is
120596119899 = (120573119899119897)2radic 1198641198681205881198974 119899 = 1 2 3 119899 (14)
From the above equation the modal functions of eachorder are as follows
120601119899 (119909) = cos (120573119899119909) minus ch (120573119899119909)+ 120585119899 [sin (120573119899119909) minus sh (120573119899119909)] (15)
According to the material parameters of aluminum alloyusing ANSYS software formodal analysis the first 3 vibrationmodal diagrams are shown in Figure 1 and the first 6 naturalfrequenciesrsquo table is shown in Table 2
322 Position Optimization Analysis of Piezoelectric Sen-sorActuator To clearly describe the optimization methodsestablish the coordinate position schematic diagram of thepiezoelectric aluminum beams as shown in Figure 2 where119883 coordinate system represents the length of the beam (theactual length of the beam is 119897 = 1500mm a small cellrepresents 50mm) and the 119884 coordinate system representsthe width of the beam (since the actual width 119887 = 20mma small cell represents 4mm) for example the coordinates of
Mathematical Problems in Engineering 5
Table 3 The numbers and position optimization table of sensorsactuators
Number Position coordinates1 (1 3)2 (1 3) (27 3)3 (1 3) (5 4) (27 2)4 (1 3) (5 3) (20 3) (27 3)5 (1 3) (8 3) (16 2) (22 3) (28 3)6 (1 2) (4 3) (10 3) (16 4) (24 2) (27 3)7 (1 3) (3 3) (8 2) (15 4) (19 4) (23 2) (28 3)8 (1 4) (3 2) (7 2) (13 4) (17 2) (21 4) (24 3) (28 3)
x
Y B(7 2)
A(0 0)
012345
25 3015 205 100
Figure 2 Coordinate establishment schematic of piezoelectricaluminum beams
point B are (7 2) in Figure 3 the actual relative position frompoint A is (350mm 8mm)
Aluminum beam positions of 1ndash8 pairs of sensoractuatorare optimized respectively by particle swarm algorithm thecoordinate position is shown in Figure 2 the whole PSOprocess is shown in Figure 3 the evolution curve of the PSOfitness is shown in Figure 4 and finally optimum positiontable of the sensoractuator is shown in Table 3
4 Modal Analysis of Aircraft Frame Structure
In order to verify the proposedmethod themodel structure issimplified to be an aluminum frame structure and the springconstraint is applied to the four corners as shown in Figure 5
The frame structure is mainly composed of aluminumalloy sheet and the spring for connecting The main perfor-mance parameters are the elastic modulus of 7 times 1010 Padensity of 2700 kgm3 Poissonrsquos ratio of 03 and elasticcoefficient of the spring of 140 nm A high-end 3D 10-nodesolid structure unit is chosen using finite element emulationsoftware ANSYS and the spring uses COMBIN14 unit withaxial or torsional performance The first 10 order modalfrequencies and mode shapes are got by modal analysison the simulated spacecraft frame only with the springconstraints of which the first 6 order mode shapes are rigiddisplacements and the 7th to 10th order are vibration modalsas shown in Figure 6Their correspondingmodal frequenciesare 1225Hz 2435Hz 3360Hz and 5980Hz
ANSYS analysis is only for the main frame model Modelwing is composed on the main frame structure in orderto achieve the purpose of the whole piezoelectric intelligentframework The density is 1730 kgm3 Youngrsquos modulus is20 times 1010 Pa and Poissonrsquos ratio is 016 The first 10 modalanalyses are carried out for experimental model structure
Table 4 The first 4 order natural modal frequencies
The order of vibrationmodal 1 2 3 4
Frequency (not attachingpiezoelectric sheets)Hz 1958 3320 4887 6175
Frequency (attachingpiezoelectric sheets)Hz 2070 3435 4970 6250
due to limited space we now give the first 2 modal straindistributions shown in Figures 7 and 8
The first 4 order natural modal frequencies are shown inTable 4
Based on optimization method in Section 32 takinginto account the stress distribution of each vibration modaland other regions with the relatively concentrated distri-bution the whole consideration to carry out piezoelectricsensoractuator arrangement is shown in Figure 9 with 10 times10 channel
5 FXLMS Algorithm [20]
The FXLMS control algorithm structure is shown inFigure 10 119875(119911) is the primary path from exciter to errorsensor 119867(119911) is the second path from the secondary sourceto the error sensor
The control system hasM controllers andN sensors119883(119896)is input vector which is the reference signal119884(119896) is the outputvector of the Mth controller in time 119896 (119896) is Lth controlresponse vector and119861(119896) isLth external response vector119864(119896)is Lth cancellation residual vector (119896) is 119883(119896) filtered by(119911) (119911) is the identifiedmodel of119867(119911) If every element in(119911) is described using a Pth order filter and each controlleris an Nth order filter119882 is the (119872 times 119873)th controller weightsmatrix The order of the reference signal is N
The adaptive filtered feedforward FXLMS algorithm isshown as follows
119884 (119896) = 119882 (119896)119883 (119896)119864 (119896) = 119861 (119896) + (119896)119882 (119896)
119882 (119896 + 1) = 119882 (119896) minus 120583119879 (119896) 119864 (119896) (16)
6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
optimization strategy for active member placement and strutcross section and compensator parameter optimization forintelligent trusses T-W Kim and J-H Kim [10] optimizedthe placement of the piezoelectric path of the flexible platesby applying the sequential quadratic programming methodGao [11] investigated integrated optimization of the actua-tor location and feedback gain in PZT smart trusses withstochastic structural parameters using a two-step optimiza-tion strategy Xian [12] combined a layered strategy and anapproximation concept and formed a two-level branchedand multipoint approximation strategy for adaptive trussactuator placement optimization Liu and Lin [13] took a two-level optimization method based on a simulated annealingalgorithm to determine the optimal channel distribution andthe optimal channel voltage for dynamic shape control ofstructures using piezoelectric materials Honda et al [14]employed the placement of piezoelectric actuators the lay-up configurations of laminated composite plates and the H2vibration control system as design variables and optimizedthem simultaneously by GA Dutta et al [15] consideredartificial bee colony and glowworm swarm optimizationalgorithms to find the optimal locations of actuatorssensorsand feedback gains of a cantilevered beam
A piezoelectric aluminum alloy smart frame structure istaken as an experimental model in this paper Since the struc-tural shape and constraints are complex the entire frameworkis taken as a combination of a plurality of piezoelectric intel-ligent beams and L-shaped structures Firstly piezoelectriccantilever is taken as a structural vibration control objectOptimization objective function is established according tocontrollability and observability criteria of system Configu-ration of sensors and actuators is optimized by particle swarmalgorithm Secondly according to the above optimizationprocess and the analysis results by ANSYS the final optimalconfiguration is obtained An experimental platform wasestablished and the experimental results indirectly verifiedthe feasibility and effectiveness of the proposed method
2 Optimization Principle of the PiezoelectricSensors and Actuators
According to Ahari [16] the Partial Differential Equation(PDE) of the cantilever beam which is made of aluminumalloy can be described as follows
119865 (119901 119905) = 119872(119901) 1205972119908 (119901 119905)1205971199052+ 2120577 [119872 (119901) 119871]12 [120597119908 (119901 119905)120597119905 ]+ 119871 [119908 (119901 119905)]
(1)
Here 119865(119901 119905) is the distribution of external force 119908(119901 119905)is deflection of beam which is a function of a space variable119901 isin 119863 and time 119905 119871 is the hardness distribution of the systemwhich is a partial differential function about a relative spacecoordinate 119901 and 119872(119901) is a mass density function whichis a positive definite function about the location of 119901 Here119872(119901) = 1 119871[119908(119901 119905)] = (119864119868120588119860)(12059741205971199094)
The principle for the distribution of the actuators shouldensure its influence on the structural perturbation to thegreatest degree In other words the actuator should transportthe energy as large as possible to the structural modeAccording to this principle the criteria for the optimizationof the actuators are [17]
1199001199011199111015840 = 2( 119899sum119894=1
119864119894) 119899radic 119899prod119894=1
119864119894 (2)
119864119894 is mathematical expectation of the ith modal totalenergy It can be considered as two parts the first part isabout the total energy of the system Generally speakingsome low modal energy is chosen on the basis that modalenergy reduces sharply along with the increasing of modalnumbers the other part is considered as the volume of anellipsoid The ellipsoid is n-dimensional and its radius isdirectly proportional to each modal energy
As the size of the diagonal elements of observabilityGramian is directly proportional to the stability of the systemthe criteria of the optimal sensor placement are
1199001199011199111015840 = ( 2119899sum119869=1
120582119869) 2119899radic 2119899prod119869=1
(120582119869) (3)
120582119869 is the eigenvalue of observability Gramian The eigen-value is fundamentally the same as that of controllabilityGramian for some small damping structural system so itis the best situation for the same numbers and positions ofsensor and actuator
3 SensorActuator Optimization AlgorithmBased on Particle Swarm
31 Establishment of Optimization Objective Function Basedon the position optimization guidelines in Section 2 it canbe seen that the controllability Gramian gives the relevanceof system state and the output and the observability Gramiangives the relevance of the system state and input But thesematrices and eigenvalues are taken depending on the statevector if the state vector changes the above will not beestablished The above guidelines also show that the vectorsof the controllability and observability Gramian are relatedto optimization configuration criteria and the controllabilityand observability Gramian are respectively related to matri-ces B and C so matrices B and C are respectively related tothe positions of the actuator and sensor
Therefore the optimization criterion is to seek the bestposition to make features of the controllability and observ-ability Gramian optimal To this end establish the followingbest guidelines when its mathematical value is small thesystem is not controllable or not considerable when themathematical value is large the system is controlled orconsiderable The value is maximum and it is the bestlocation
Before setting the optimal objective function the observ-ability matrix 119882obs and the controllability matrix 119882con are
Mathematical Problems in Engineering 3
Table 1 The relevant parameters of sensorsactuators
Type Length(mm)
Width(mm)
Thickness(mm)
Couplingcoefficient119870119901
Piezoelectricconstant11988931
Bulk densityP (103 kgm3)
P-51 20 6 04 062 186 76PZT-5H 40 8 1 068 275 75
respectively obtained by the expression between Gramianmatrix and the system modal energy [18]
119882obs = diag( 1198881198994120585119894119908119894 1198881198994120585119894119908119894) 119894 = 1 2 119899119882con = diag( 1205731198994120577119894119908119894 1205731198994120577119894119908119894) 119894 = 1 2 119899 (4)
Here 120585 is the extraneous signal 120577 is the control signal and119908 is the deflection of beamIf the natural frequency distribution of structural vibra-
tion system is well and the damping coefficient is small theoptimal objective function is given as follows
Obj = trace (119882) 2119899radicdet (119882)120590 (120582119894) (5)
where119882 is Gramianmatrix its value is119882obs or119882con 120590(120582119894) isstandard deviation for the eigenvalues 120582119894 of Gramian matrix119882 2119899radicdet(119882) is the geometric mean of the eigenvalues itsphysical significance is the volume of the ellipse 119899 is thecoefficient of freedom degree 120590(120582119894) is the location mainlyavoiding both great and small eigenvalues and trace(119882) isthe output energy of the actuator119882 can be expressed as each order modal energy ormodal value maximum and minimum values of trace(119882)2119899radicdet(119882) and 1120590(120582119894) have synchronization And trace(119882)may represent sum of each modal energy a small value canbe ignored during the total sum so that it can be expressed assum of lower modal energies 2119899radicdet(119882) can be expressed asproduct of the modal energies as we all know that each playsa role in the product operation it means that all modals arefunctioning also taking into account higher-order modalsTherefore this criterion well considers each order modal itwill be very effective to optimize the configuration for thesensoractuator
32 Process and Analysis of PSO According to the char-acteristics analysis of piezoelectric aluminum alloy beamstructure optimization objective function is obtained forthe piezoelectric sensor and actuator As in literature [2]on the basis of finite element modeling it is studied onthe actuator position optimization of dimensional flexibleplate using controlled Gramian matrix In the process ofposition optimization using controllability and observabilityGramian each iterationrsquos calculations need to solve Lyapunovequations its computation will see a sharp rise when the
system has a large degree of freedom or many actuators needto be position-optimized resulting in a very long computingtime Thus in order to avoid complex calculations particleswarm algorithm was proposed in this paper to optimizethe objective function to achieve advantages of high com-putational efficiency fast convergence and being simple andversatile
Optimization process of piezoelectric sensoractuator byparticle swarm algorithm broadly is divided into severalsteps
(1) First establish kinetic equations according to opti-mization object expressions of each orderrsquos naturalfrequencies and modal strain are obtained
(2) Carry out modal strain analysis and get each orderrsquosnatural frequencies modal shapes and modal stressdistribution
(3) The given modal values and the natural frequencyare converted to the needed form of the objectivefunction optimization and then are substituted intothe objective function the position based on particleswarm algorithm is optimized and ultimately anoptimal layout plan of piezoelectric sensoractuator isgiven
321 Modal Analysis of Smart Piezoelectric Beams Sinceit is more complex to analyze directly piezoelectric framestructure modal in order to more clearly describe theoptimization methods in the paper the constituent units ofthe piezoelectric frame structure (ie piezoelectric beam) aredirectly analyzedThematerial of the framework is aluminumalloy and its related parameters are as follows length 119897 =1500mm width 119887 = 20mm height ℎ = 5mm density120588 = 2700 kgm3 Youngrsquos modulus 119864119901 = 70 times 1010 Pa andPoissonrsquos ratio ] = 033 Material type of piezoelectric sensorsis P-51 material type of piezoelectric actuator is PZT-5H andits parameters are shown in Table 1 [19]
Suppose piezoelectric beam elements are the idealstate according to (1) combining with the actual situationdescribed above the dynamic equations and boundary con-ditions of aluminum beam are obtained as follows
119864119868120588119860 1205974119910 (119909 119905)1205971199094 + 2120577radic 119864119868120588119860 [120597
3119910 (119909 119905)1205971199092120597119905 ] + 1205972119910 (119909 119905)1205971199052
= 1120588119860119875sum119897=1
120575 (119909 minus 119909119897) 119891119897 (119905) (6)
4 Mathematical Problems in Engineering
(a) The first order (b) The second order
(c) The third order
Figure 1 The first 3 vibration modal diagrams
where119864 is a modal amount and 119868 is a cross-section secondarydistance it can be converted to the form of the generalsolution
119910 (119909) = 1198621sin (120573119909) + 1198622cos (120573119909)+ 1198623sinh (120573119909) + 1198624cosh (120573119909) (7)
119910 (119909 119905)1003816100381610038161003816119909=0 = 0120597119910 (119909 119905)12059711990910038161003816100381610038161003816100381610038161003816119909=0 = 0
(8)
1198641198681205972119910 (119909 119905)1205971199092100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
1198641198681205973119910 (119909 119905)1205971199093100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
(9)
Equations (8) and (9) are respectively geometric bound-ary conditions of fixed end and the force boundary conditionsof the free end it can be obtained by the two equations
1198621 = minus11986231198622 = minus11986241198621 [cos (120573119897) + ch (120573119897)] + 1198622 [sin (120573119897) + sh (120573119897)] = 0minus 1198621 [sin (120573119897) minus sh (120573119897)] + 1198622 [cos (120573119897) + ch (120573119897)] = 0
(10)
Conditions of the nontrivial solution for1198621 and1198622 in (10)are as follows1003816100381610038161003816100381610038161003816100381610038161003816
cos (120573119897) + ch (120573119897) sin (120573119897) + sh (120573119897)minussin (120573119897) + sh (120573119897) cos (120573119897) + ch (120573119897)1003816100381610038161003816100381610038161003816100381610038161003816 = 0 (11)
Expanding from (11) we can obtain
cos (120573119897) ch (120573119897) + 1 = 0 (12)
The solution for (12) is
1205731119897 = 18751205732119897 = 46941205733119897 = 7855
Table 2 The first 6 natural frequencies of piezoelectric aluminumbeams
Mode 1 2 3 4 5 6Naturalfrequency (Hz) 29518 34851 95873 178932 200689 253306
1205734119897 = 109961205735119897 = 14137
120573119899119897 asymp ((2119899 minus 1)2 ) 120587
(13)
Its natural frequency of each order is
120596119899 = (120573119899119897)2radic 1198641198681205881198974 119899 = 1 2 3 119899 (14)
From the above equation the modal functions of eachorder are as follows
120601119899 (119909) = cos (120573119899119909) minus ch (120573119899119909)+ 120585119899 [sin (120573119899119909) minus sh (120573119899119909)] (15)
According to the material parameters of aluminum alloyusing ANSYS software formodal analysis the first 3 vibrationmodal diagrams are shown in Figure 1 and the first 6 naturalfrequenciesrsquo table is shown in Table 2
322 Position Optimization Analysis of Piezoelectric Sen-sorActuator To clearly describe the optimization methodsestablish the coordinate position schematic diagram of thepiezoelectric aluminum beams as shown in Figure 2 where119883 coordinate system represents the length of the beam (theactual length of the beam is 119897 = 1500mm a small cellrepresents 50mm) and the 119884 coordinate system representsthe width of the beam (since the actual width 119887 = 20mma small cell represents 4mm) for example the coordinates of
Mathematical Problems in Engineering 5
Table 3 The numbers and position optimization table of sensorsactuators
Number Position coordinates1 (1 3)2 (1 3) (27 3)3 (1 3) (5 4) (27 2)4 (1 3) (5 3) (20 3) (27 3)5 (1 3) (8 3) (16 2) (22 3) (28 3)6 (1 2) (4 3) (10 3) (16 4) (24 2) (27 3)7 (1 3) (3 3) (8 2) (15 4) (19 4) (23 2) (28 3)8 (1 4) (3 2) (7 2) (13 4) (17 2) (21 4) (24 3) (28 3)
x
Y B(7 2)
A(0 0)
012345
25 3015 205 100
Figure 2 Coordinate establishment schematic of piezoelectricaluminum beams
point B are (7 2) in Figure 3 the actual relative position frompoint A is (350mm 8mm)
Aluminum beam positions of 1ndash8 pairs of sensoractuatorare optimized respectively by particle swarm algorithm thecoordinate position is shown in Figure 2 the whole PSOprocess is shown in Figure 3 the evolution curve of the PSOfitness is shown in Figure 4 and finally optimum positiontable of the sensoractuator is shown in Table 3
4 Modal Analysis of Aircraft Frame Structure
In order to verify the proposedmethod themodel structure issimplified to be an aluminum frame structure and the springconstraint is applied to the four corners as shown in Figure 5
The frame structure is mainly composed of aluminumalloy sheet and the spring for connecting The main perfor-mance parameters are the elastic modulus of 7 times 1010 Padensity of 2700 kgm3 Poissonrsquos ratio of 03 and elasticcoefficient of the spring of 140 nm A high-end 3D 10-nodesolid structure unit is chosen using finite element emulationsoftware ANSYS and the spring uses COMBIN14 unit withaxial or torsional performance The first 10 order modalfrequencies and mode shapes are got by modal analysison the simulated spacecraft frame only with the springconstraints of which the first 6 order mode shapes are rigiddisplacements and the 7th to 10th order are vibration modalsas shown in Figure 6Their correspondingmodal frequenciesare 1225Hz 2435Hz 3360Hz and 5980Hz
ANSYS analysis is only for the main frame model Modelwing is composed on the main frame structure in orderto achieve the purpose of the whole piezoelectric intelligentframework The density is 1730 kgm3 Youngrsquos modulus is20 times 1010 Pa and Poissonrsquos ratio is 016 The first 10 modalanalyses are carried out for experimental model structure
Table 4 The first 4 order natural modal frequencies
The order of vibrationmodal 1 2 3 4
Frequency (not attachingpiezoelectric sheets)Hz 1958 3320 4887 6175
Frequency (attachingpiezoelectric sheets)Hz 2070 3435 4970 6250
due to limited space we now give the first 2 modal straindistributions shown in Figures 7 and 8
The first 4 order natural modal frequencies are shown inTable 4
Based on optimization method in Section 32 takinginto account the stress distribution of each vibration modaland other regions with the relatively concentrated distri-bution the whole consideration to carry out piezoelectricsensoractuator arrangement is shown in Figure 9 with 10 times10 channel
5 FXLMS Algorithm [20]
The FXLMS control algorithm structure is shown inFigure 10 119875(119911) is the primary path from exciter to errorsensor 119867(119911) is the second path from the secondary sourceto the error sensor
The control system hasM controllers andN sensors119883(119896)is input vector which is the reference signal119884(119896) is the outputvector of the Mth controller in time 119896 (119896) is Lth controlresponse vector and119861(119896) isLth external response vector119864(119896)is Lth cancellation residual vector (119896) is 119883(119896) filtered by(119911) (119911) is the identifiedmodel of119867(119911) If every element in(119911) is described using a Pth order filter and each controlleris an Nth order filter119882 is the (119872 times 119873)th controller weightsmatrix The order of the reference signal is N
The adaptive filtered feedforward FXLMS algorithm isshown as follows
119884 (119896) = 119882 (119896)119883 (119896)119864 (119896) = 119861 (119896) + (119896)119882 (119896)
119882 (119896 + 1) = 119882 (119896) minus 120583119879 (119896) 119864 (119896) (16)
6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Table 1 The relevant parameters of sensorsactuators
Type Length(mm)
Width(mm)
Thickness(mm)
Couplingcoefficient119870119901
Piezoelectricconstant11988931
Bulk densityP (103 kgm3)
P-51 20 6 04 062 186 76PZT-5H 40 8 1 068 275 75
respectively obtained by the expression between Gramianmatrix and the system modal energy [18]
119882obs = diag( 1198881198994120585119894119908119894 1198881198994120585119894119908119894) 119894 = 1 2 119899119882con = diag( 1205731198994120577119894119908119894 1205731198994120577119894119908119894) 119894 = 1 2 119899 (4)
Here 120585 is the extraneous signal 120577 is the control signal and119908 is the deflection of beamIf the natural frequency distribution of structural vibra-
tion system is well and the damping coefficient is small theoptimal objective function is given as follows
Obj = trace (119882) 2119899radicdet (119882)120590 (120582119894) (5)
where119882 is Gramianmatrix its value is119882obs or119882con 120590(120582119894) isstandard deviation for the eigenvalues 120582119894 of Gramian matrix119882 2119899radicdet(119882) is the geometric mean of the eigenvalues itsphysical significance is the volume of the ellipse 119899 is thecoefficient of freedom degree 120590(120582119894) is the location mainlyavoiding both great and small eigenvalues and trace(119882) isthe output energy of the actuator119882 can be expressed as each order modal energy ormodal value maximum and minimum values of trace(119882)2119899radicdet(119882) and 1120590(120582119894) have synchronization And trace(119882)may represent sum of each modal energy a small value canbe ignored during the total sum so that it can be expressed assum of lower modal energies 2119899radicdet(119882) can be expressed asproduct of the modal energies as we all know that each playsa role in the product operation it means that all modals arefunctioning also taking into account higher-order modalsTherefore this criterion well considers each order modal itwill be very effective to optimize the configuration for thesensoractuator
32 Process and Analysis of PSO According to the char-acteristics analysis of piezoelectric aluminum alloy beamstructure optimization objective function is obtained forthe piezoelectric sensor and actuator As in literature [2]on the basis of finite element modeling it is studied onthe actuator position optimization of dimensional flexibleplate using controlled Gramian matrix In the process ofposition optimization using controllability and observabilityGramian each iterationrsquos calculations need to solve Lyapunovequations its computation will see a sharp rise when the
system has a large degree of freedom or many actuators needto be position-optimized resulting in a very long computingtime Thus in order to avoid complex calculations particleswarm algorithm was proposed in this paper to optimizethe objective function to achieve advantages of high com-putational efficiency fast convergence and being simple andversatile
Optimization process of piezoelectric sensoractuator byparticle swarm algorithm broadly is divided into severalsteps
(1) First establish kinetic equations according to opti-mization object expressions of each orderrsquos naturalfrequencies and modal strain are obtained
(2) Carry out modal strain analysis and get each orderrsquosnatural frequencies modal shapes and modal stressdistribution
(3) The given modal values and the natural frequencyare converted to the needed form of the objectivefunction optimization and then are substituted intothe objective function the position based on particleswarm algorithm is optimized and ultimately anoptimal layout plan of piezoelectric sensoractuator isgiven
321 Modal Analysis of Smart Piezoelectric Beams Sinceit is more complex to analyze directly piezoelectric framestructure modal in order to more clearly describe theoptimization methods in the paper the constituent units ofthe piezoelectric frame structure (ie piezoelectric beam) aredirectly analyzedThematerial of the framework is aluminumalloy and its related parameters are as follows length 119897 =1500mm width 119887 = 20mm height ℎ = 5mm density120588 = 2700 kgm3 Youngrsquos modulus 119864119901 = 70 times 1010 Pa andPoissonrsquos ratio ] = 033 Material type of piezoelectric sensorsis P-51 material type of piezoelectric actuator is PZT-5H andits parameters are shown in Table 1 [19]
Suppose piezoelectric beam elements are the idealstate according to (1) combining with the actual situationdescribed above the dynamic equations and boundary con-ditions of aluminum beam are obtained as follows
119864119868120588119860 1205974119910 (119909 119905)1205971199094 + 2120577radic 119864119868120588119860 [120597
3119910 (119909 119905)1205971199092120597119905 ] + 1205972119910 (119909 119905)1205971199052
= 1120588119860119875sum119897=1
120575 (119909 minus 119909119897) 119891119897 (119905) (6)
4 Mathematical Problems in Engineering
(a) The first order (b) The second order
(c) The third order
Figure 1 The first 3 vibration modal diagrams
where119864 is a modal amount and 119868 is a cross-section secondarydistance it can be converted to the form of the generalsolution
119910 (119909) = 1198621sin (120573119909) + 1198622cos (120573119909)+ 1198623sinh (120573119909) + 1198624cosh (120573119909) (7)
119910 (119909 119905)1003816100381610038161003816119909=0 = 0120597119910 (119909 119905)12059711990910038161003816100381610038161003816100381610038161003816119909=0 = 0
(8)
1198641198681205972119910 (119909 119905)1205971199092100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
1198641198681205973119910 (119909 119905)1205971199093100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
(9)
Equations (8) and (9) are respectively geometric bound-ary conditions of fixed end and the force boundary conditionsof the free end it can be obtained by the two equations
1198621 = minus11986231198622 = minus11986241198621 [cos (120573119897) + ch (120573119897)] + 1198622 [sin (120573119897) + sh (120573119897)] = 0minus 1198621 [sin (120573119897) minus sh (120573119897)] + 1198622 [cos (120573119897) + ch (120573119897)] = 0
(10)
Conditions of the nontrivial solution for1198621 and1198622 in (10)are as follows1003816100381610038161003816100381610038161003816100381610038161003816
cos (120573119897) + ch (120573119897) sin (120573119897) + sh (120573119897)minussin (120573119897) + sh (120573119897) cos (120573119897) + ch (120573119897)1003816100381610038161003816100381610038161003816100381610038161003816 = 0 (11)
Expanding from (11) we can obtain
cos (120573119897) ch (120573119897) + 1 = 0 (12)
The solution for (12) is
1205731119897 = 18751205732119897 = 46941205733119897 = 7855
Table 2 The first 6 natural frequencies of piezoelectric aluminumbeams
Mode 1 2 3 4 5 6Naturalfrequency (Hz) 29518 34851 95873 178932 200689 253306
1205734119897 = 109961205735119897 = 14137
120573119899119897 asymp ((2119899 minus 1)2 ) 120587
(13)
Its natural frequency of each order is
120596119899 = (120573119899119897)2radic 1198641198681205881198974 119899 = 1 2 3 119899 (14)
From the above equation the modal functions of eachorder are as follows
120601119899 (119909) = cos (120573119899119909) minus ch (120573119899119909)+ 120585119899 [sin (120573119899119909) minus sh (120573119899119909)] (15)
According to the material parameters of aluminum alloyusing ANSYS software formodal analysis the first 3 vibrationmodal diagrams are shown in Figure 1 and the first 6 naturalfrequenciesrsquo table is shown in Table 2
322 Position Optimization Analysis of Piezoelectric Sen-sorActuator To clearly describe the optimization methodsestablish the coordinate position schematic diagram of thepiezoelectric aluminum beams as shown in Figure 2 where119883 coordinate system represents the length of the beam (theactual length of the beam is 119897 = 1500mm a small cellrepresents 50mm) and the 119884 coordinate system representsthe width of the beam (since the actual width 119887 = 20mma small cell represents 4mm) for example the coordinates of
Mathematical Problems in Engineering 5
Table 3 The numbers and position optimization table of sensorsactuators
Number Position coordinates1 (1 3)2 (1 3) (27 3)3 (1 3) (5 4) (27 2)4 (1 3) (5 3) (20 3) (27 3)5 (1 3) (8 3) (16 2) (22 3) (28 3)6 (1 2) (4 3) (10 3) (16 4) (24 2) (27 3)7 (1 3) (3 3) (8 2) (15 4) (19 4) (23 2) (28 3)8 (1 4) (3 2) (7 2) (13 4) (17 2) (21 4) (24 3) (28 3)
x
Y B(7 2)
A(0 0)
012345
25 3015 205 100
Figure 2 Coordinate establishment schematic of piezoelectricaluminum beams
point B are (7 2) in Figure 3 the actual relative position frompoint A is (350mm 8mm)
Aluminum beam positions of 1ndash8 pairs of sensoractuatorare optimized respectively by particle swarm algorithm thecoordinate position is shown in Figure 2 the whole PSOprocess is shown in Figure 3 the evolution curve of the PSOfitness is shown in Figure 4 and finally optimum positiontable of the sensoractuator is shown in Table 3
4 Modal Analysis of Aircraft Frame Structure
In order to verify the proposedmethod themodel structure issimplified to be an aluminum frame structure and the springconstraint is applied to the four corners as shown in Figure 5
The frame structure is mainly composed of aluminumalloy sheet and the spring for connecting The main perfor-mance parameters are the elastic modulus of 7 times 1010 Padensity of 2700 kgm3 Poissonrsquos ratio of 03 and elasticcoefficient of the spring of 140 nm A high-end 3D 10-nodesolid structure unit is chosen using finite element emulationsoftware ANSYS and the spring uses COMBIN14 unit withaxial or torsional performance The first 10 order modalfrequencies and mode shapes are got by modal analysison the simulated spacecraft frame only with the springconstraints of which the first 6 order mode shapes are rigiddisplacements and the 7th to 10th order are vibration modalsas shown in Figure 6Their correspondingmodal frequenciesare 1225Hz 2435Hz 3360Hz and 5980Hz
ANSYS analysis is only for the main frame model Modelwing is composed on the main frame structure in orderto achieve the purpose of the whole piezoelectric intelligentframework The density is 1730 kgm3 Youngrsquos modulus is20 times 1010 Pa and Poissonrsquos ratio is 016 The first 10 modalanalyses are carried out for experimental model structure
Table 4 The first 4 order natural modal frequencies
The order of vibrationmodal 1 2 3 4
Frequency (not attachingpiezoelectric sheets)Hz 1958 3320 4887 6175
Frequency (attachingpiezoelectric sheets)Hz 2070 3435 4970 6250
due to limited space we now give the first 2 modal straindistributions shown in Figures 7 and 8
The first 4 order natural modal frequencies are shown inTable 4
Based on optimization method in Section 32 takinginto account the stress distribution of each vibration modaland other regions with the relatively concentrated distri-bution the whole consideration to carry out piezoelectricsensoractuator arrangement is shown in Figure 9 with 10 times10 channel
5 FXLMS Algorithm [20]
The FXLMS control algorithm structure is shown inFigure 10 119875(119911) is the primary path from exciter to errorsensor 119867(119911) is the second path from the secondary sourceto the error sensor
The control system hasM controllers andN sensors119883(119896)is input vector which is the reference signal119884(119896) is the outputvector of the Mth controller in time 119896 (119896) is Lth controlresponse vector and119861(119896) isLth external response vector119864(119896)is Lth cancellation residual vector (119896) is 119883(119896) filtered by(119911) (119911) is the identifiedmodel of119867(119911) If every element in(119911) is described using a Pth order filter and each controlleris an Nth order filter119882 is the (119872 times 119873)th controller weightsmatrix The order of the reference signal is N
The adaptive filtered feedforward FXLMS algorithm isshown as follows
119884 (119896) = 119882 (119896)119883 (119896)119864 (119896) = 119861 (119896) + (119896)119882 (119896)
119882 (119896 + 1) = 119882 (119896) minus 120583119879 (119896) 119864 (119896) (16)
6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
(a) The first order (b) The second order
(c) The third order
Figure 1 The first 3 vibration modal diagrams
where119864 is a modal amount and 119868 is a cross-section secondarydistance it can be converted to the form of the generalsolution
119910 (119909) = 1198621sin (120573119909) + 1198622cos (120573119909)+ 1198623sinh (120573119909) + 1198624cosh (120573119909) (7)
119910 (119909 119905)1003816100381610038161003816119909=0 = 0120597119910 (119909 119905)12059711990910038161003816100381610038161003816100381610038161003816119909=0 = 0
(8)
1198641198681205972119910 (119909 119905)1205971199092100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
1198641198681205973119910 (119909 119905)1205971199093100381610038161003816100381610038161003816100381610038161003816119909=119897 = 0
(9)
Equations (8) and (9) are respectively geometric bound-ary conditions of fixed end and the force boundary conditionsof the free end it can be obtained by the two equations
1198621 = minus11986231198622 = minus11986241198621 [cos (120573119897) + ch (120573119897)] + 1198622 [sin (120573119897) + sh (120573119897)] = 0minus 1198621 [sin (120573119897) minus sh (120573119897)] + 1198622 [cos (120573119897) + ch (120573119897)] = 0
(10)
Conditions of the nontrivial solution for1198621 and1198622 in (10)are as follows1003816100381610038161003816100381610038161003816100381610038161003816
cos (120573119897) + ch (120573119897) sin (120573119897) + sh (120573119897)minussin (120573119897) + sh (120573119897) cos (120573119897) + ch (120573119897)1003816100381610038161003816100381610038161003816100381610038161003816 = 0 (11)
Expanding from (11) we can obtain
cos (120573119897) ch (120573119897) + 1 = 0 (12)
The solution for (12) is
1205731119897 = 18751205732119897 = 46941205733119897 = 7855
Table 2 The first 6 natural frequencies of piezoelectric aluminumbeams
Mode 1 2 3 4 5 6Naturalfrequency (Hz) 29518 34851 95873 178932 200689 253306
1205734119897 = 109961205735119897 = 14137
120573119899119897 asymp ((2119899 minus 1)2 ) 120587
(13)
Its natural frequency of each order is
120596119899 = (120573119899119897)2radic 1198641198681205881198974 119899 = 1 2 3 119899 (14)
From the above equation the modal functions of eachorder are as follows
120601119899 (119909) = cos (120573119899119909) minus ch (120573119899119909)+ 120585119899 [sin (120573119899119909) minus sh (120573119899119909)] (15)
According to the material parameters of aluminum alloyusing ANSYS software formodal analysis the first 3 vibrationmodal diagrams are shown in Figure 1 and the first 6 naturalfrequenciesrsquo table is shown in Table 2
322 Position Optimization Analysis of Piezoelectric Sen-sorActuator To clearly describe the optimization methodsestablish the coordinate position schematic diagram of thepiezoelectric aluminum beams as shown in Figure 2 where119883 coordinate system represents the length of the beam (theactual length of the beam is 119897 = 1500mm a small cellrepresents 50mm) and the 119884 coordinate system representsthe width of the beam (since the actual width 119887 = 20mma small cell represents 4mm) for example the coordinates of
Mathematical Problems in Engineering 5
Table 3 The numbers and position optimization table of sensorsactuators
Number Position coordinates1 (1 3)2 (1 3) (27 3)3 (1 3) (5 4) (27 2)4 (1 3) (5 3) (20 3) (27 3)5 (1 3) (8 3) (16 2) (22 3) (28 3)6 (1 2) (4 3) (10 3) (16 4) (24 2) (27 3)7 (1 3) (3 3) (8 2) (15 4) (19 4) (23 2) (28 3)8 (1 4) (3 2) (7 2) (13 4) (17 2) (21 4) (24 3) (28 3)
x
Y B(7 2)
A(0 0)
012345
25 3015 205 100
Figure 2 Coordinate establishment schematic of piezoelectricaluminum beams
point B are (7 2) in Figure 3 the actual relative position frompoint A is (350mm 8mm)
Aluminum beam positions of 1ndash8 pairs of sensoractuatorare optimized respectively by particle swarm algorithm thecoordinate position is shown in Figure 2 the whole PSOprocess is shown in Figure 3 the evolution curve of the PSOfitness is shown in Figure 4 and finally optimum positiontable of the sensoractuator is shown in Table 3
4 Modal Analysis of Aircraft Frame Structure
In order to verify the proposedmethod themodel structure issimplified to be an aluminum frame structure and the springconstraint is applied to the four corners as shown in Figure 5
The frame structure is mainly composed of aluminumalloy sheet and the spring for connecting The main perfor-mance parameters are the elastic modulus of 7 times 1010 Padensity of 2700 kgm3 Poissonrsquos ratio of 03 and elasticcoefficient of the spring of 140 nm A high-end 3D 10-nodesolid structure unit is chosen using finite element emulationsoftware ANSYS and the spring uses COMBIN14 unit withaxial or torsional performance The first 10 order modalfrequencies and mode shapes are got by modal analysison the simulated spacecraft frame only with the springconstraints of which the first 6 order mode shapes are rigiddisplacements and the 7th to 10th order are vibration modalsas shown in Figure 6Their correspondingmodal frequenciesare 1225Hz 2435Hz 3360Hz and 5980Hz
ANSYS analysis is only for the main frame model Modelwing is composed on the main frame structure in orderto achieve the purpose of the whole piezoelectric intelligentframework The density is 1730 kgm3 Youngrsquos modulus is20 times 1010 Pa and Poissonrsquos ratio is 016 The first 10 modalanalyses are carried out for experimental model structure
Table 4 The first 4 order natural modal frequencies
The order of vibrationmodal 1 2 3 4
Frequency (not attachingpiezoelectric sheets)Hz 1958 3320 4887 6175
Frequency (attachingpiezoelectric sheets)Hz 2070 3435 4970 6250
due to limited space we now give the first 2 modal straindistributions shown in Figures 7 and 8
The first 4 order natural modal frequencies are shown inTable 4
Based on optimization method in Section 32 takinginto account the stress distribution of each vibration modaland other regions with the relatively concentrated distri-bution the whole consideration to carry out piezoelectricsensoractuator arrangement is shown in Figure 9 with 10 times10 channel
5 FXLMS Algorithm [20]
The FXLMS control algorithm structure is shown inFigure 10 119875(119911) is the primary path from exciter to errorsensor 119867(119911) is the second path from the secondary sourceto the error sensor
The control system hasM controllers andN sensors119883(119896)is input vector which is the reference signal119884(119896) is the outputvector of the Mth controller in time 119896 (119896) is Lth controlresponse vector and119861(119896) isLth external response vector119864(119896)is Lth cancellation residual vector (119896) is 119883(119896) filtered by(119911) (119911) is the identifiedmodel of119867(119911) If every element in(119911) is described using a Pth order filter and each controlleris an Nth order filter119882 is the (119872 times 119873)th controller weightsmatrix The order of the reference signal is N
The adaptive filtered feedforward FXLMS algorithm isshown as follows
119884 (119896) = 119882 (119896)119883 (119896)119864 (119896) = 119861 (119896) + (119896)119882 (119896)
119882 (119896 + 1) = 119882 (119896) minus 120583119879 (119896) 119864 (119896) (16)
6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Table 3 The numbers and position optimization table of sensorsactuators
Number Position coordinates1 (1 3)2 (1 3) (27 3)3 (1 3) (5 4) (27 2)4 (1 3) (5 3) (20 3) (27 3)5 (1 3) (8 3) (16 2) (22 3) (28 3)6 (1 2) (4 3) (10 3) (16 4) (24 2) (27 3)7 (1 3) (3 3) (8 2) (15 4) (19 4) (23 2) (28 3)8 (1 4) (3 2) (7 2) (13 4) (17 2) (21 4) (24 3) (28 3)
x
Y B(7 2)
A(0 0)
012345
25 3015 205 100
Figure 2 Coordinate establishment schematic of piezoelectricaluminum beams
point B are (7 2) in Figure 3 the actual relative position frompoint A is (350mm 8mm)
Aluminum beam positions of 1ndash8 pairs of sensoractuatorare optimized respectively by particle swarm algorithm thecoordinate position is shown in Figure 2 the whole PSOprocess is shown in Figure 3 the evolution curve of the PSOfitness is shown in Figure 4 and finally optimum positiontable of the sensoractuator is shown in Table 3
4 Modal Analysis of Aircraft Frame Structure
In order to verify the proposedmethod themodel structure issimplified to be an aluminum frame structure and the springconstraint is applied to the four corners as shown in Figure 5
The frame structure is mainly composed of aluminumalloy sheet and the spring for connecting The main perfor-mance parameters are the elastic modulus of 7 times 1010 Padensity of 2700 kgm3 Poissonrsquos ratio of 03 and elasticcoefficient of the spring of 140 nm A high-end 3D 10-nodesolid structure unit is chosen using finite element emulationsoftware ANSYS and the spring uses COMBIN14 unit withaxial or torsional performance The first 10 order modalfrequencies and mode shapes are got by modal analysison the simulated spacecraft frame only with the springconstraints of which the first 6 order mode shapes are rigiddisplacements and the 7th to 10th order are vibration modalsas shown in Figure 6Their correspondingmodal frequenciesare 1225Hz 2435Hz 3360Hz and 5980Hz
ANSYS analysis is only for the main frame model Modelwing is composed on the main frame structure in orderto achieve the purpose of the whole piezoelectric intelligentframework The density is 1730 kgm3 Youngrsquos modulus is20 times 1010 Pa and Poissonrsquos ratio is 016 The first 10 modalanalyses are carried out for experimental model structure
Table 4 The first 4 order natural modal frequencies
The order of vibrationmodal 1 2 3 4
Frequency (not attachingpiezoelectric sheets)Hz 1958 3320 4887 6175
Frequency (attachingpiezoelectric sheets)Hz 2070 3435 4970 6250
due to limited space we now give the first 2 modal straindistributions shown in Figures 7 and 8
The first 4 order natural modal frequencies are shown inTable 4
Based on optimization method in Section 32 takinginto account the stress distribution of each vibration modaland other regions with the relatively concentrated distri-bution the whole consideration to carry out piezoelectricsensoractuator arrangement is shown in Figure 9 with 10 times10 channel
5 FXLMS Algorithm [20]
The FXLMS control algorithm structure is shown inFigure 10 119875(119911) is the primary path from exciter to errorsensor 119867(119911) is the second path from the secondary sourceto the error sensor
The control system hasM controllers andN sensors119883(119896)is input vector which is the reference signal119884(119896) is the outputvector of the Mth controller in time 119896 (119896) is Lth controlresponse vector and119861(119896) isLth external response vector119864(119896)is Lth cancellation residual vector (119896) is 119883(119896) filtered by(119911) (119911) is the identifiedmodel of119867(119911) If every element in(119911) is described using a Pth order filter and each controlleris an Nth order filter119882 is the (119872 times 119873)th controller weightsmatrix The order of the reference signal is N
The adaptive filtered feedforward FXLMS algorithm isshown as follows
119884 (119896) = 119882 (119896)119883 (119896)119864 (119896) = 119861 (119896) + (119896)119882 (119896)
119882 (119896 + 1) = 119882 (119896) minus 120583119879 (119896) 119864 (119896) (16)
6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Start
Construct fitnessfunction Obj
Randomly produce the initialpopulation
Compute fitness value ofPSO
Update particle position
Update particle velocity
Whether it reaches thestandard requirements
Output optimization results
Calculate W120590(120582i) Whether xid
is better than pid
pid = xid
Whether xid
is better than pgd
pgd = xid
Initialize parameters of particle swarm
m a1 a2 r1 r2 Vmax and so on
Figure 3 Position optimization algorithm flowchart of PSO piezoelectric element
8
7
6
5
4
3
2
1
0
Func
tion
fitne
ss v
alue
times104
5 10 15 20 25 30 35 40 45 500
Evolutionary iterative times
Figure 4 The evolution curve of PSO fitness
X
Y
Z
Figure 5 Simplified model of aircraft framework
Here 120583 is the step factor 0 lt 120583 lt 1119882(119896) is the (119872times119873)thcontroller weights matrix (119896) is119883(119896) filtered by 2
119882(119896) = [[[[[[[
11990810 (119896) 11990811 (119896) sdot sdot sdot 1199081119873minus1 (119896)11990820 (119896) 11990821 (119896) sdot sdot sdot 1199082119873minus1 (119896)sdot sdot sdot sdot sdot sdot d sdot sdot sdot1199081198720 (119896) 1199081198721 (119896) sdot sdot sdot 119908119872119873minus1 (119896)
]]]]]]]
(119896) = [[[[[[[
11 (119896) 12 (119896) sdot sdot sdot 1119871 (119896)21 (119896) 22 (119896) sdot sdot sdot 2119871 (119896)sdot sdot sdot sdot sdot sdot 119898119897 (119896) sdot sdot sdot1198721 (119896) 1198722 (119896) sdot sdot sdot 119872119871 (119896)
]]]]]]]
(17)
where 119898119897(119896) = [119898119897(119896) 119898119897(119896minus1) 119898119897(119896minus119873+1)] 119898119897(119896minus119899 + 1) = sum119875minus1119894=0 ℎ119898119897119894119909(119896 minus 119894 minus 119899 + 2)6 The Vibration ControlExperiment and Verification
Experimental platform mainly consists of the aluminumouter frame for the stationary support signal generator
Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
MN
MXX
Y
Z
(a) The 7th-order modal strain plot
MN
MX
X
Y
Z
(b) The 8th-order modal strain plot
MN
MX
X
Y
Z
(c) The 9th-order modal strain plot
MNMX
X
Y
Z
(d) The 10th-order modal strain plot
Figure 6 Modal strain plot of the 7th to 10th order
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 7 The first-order vibration modal strain distribution
(Agilent 33521A a 30MHz functionarbitrary waveformgenerator) a signal amplifier (model 2210) a power ampli-fier (model 7602M wideband amplifier) a charge amplifier(YE5852A) a low pass filter (YE3760) high-speed data ADacquisition card (PIC 1712) and DA output card (PIC 1721)a high performance computer an oscilloscope and relatedmeasurements and control units The measurement and
control software is developed on VC 60 to guarantee therealization of the system function and the control processThe vibration control experimental platform is shown inFigure 11
Multichannel vibration control experiment of 10 inputsand 10 outputs is carried out The experimental processroughly includes the following steps
8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
(a) The main support frame (b) The auxiliary support frame
(c) The level wing
Figure 8 The second-order vibration modal strain distribution
Piezoelectric sensor Piezoelectric actuator
Figure 9 Planform of the sensoractuator location arrangement
(1) Output a sinusoidal stimulating signal whose fre-quency is119891 = 2070Hz using the signal generatorThesignal is amplified by the power amplifier and passedthe vibration exciter which generates the continualvibration to the frame
(2) Vibration control experiment is carried out byFXLMS Based on themeasure and control procedureset the control parameters such as sample frequencyof 119891119888 = 300Hz the step convergence of 120583 = 001and the length of the adaptive filter of 119873 = 24factors
(3) Run control algorithm and store the timed datawhich is needed to prepare for the experimentalanalysis
Figures 12(a) and 13(a) respectively show vibrationresponse time histories for channels 2 and 8 Figures 12(b) and13(b) respectively show control voltage outputs for channels2 and 8 It can effectively suppress the vibration responseof the model structure at about 35 S Figure 14 is structuralvibration response overall suppression effect diagram (iethe sum of each sensor signal minimum mean square error(MSE)) Structural overall response is significantly decreased
Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
LMSalgorithm
+
minus
External disturbance
Controller
WY(k)X(k)
B(k) E(k)
H(z)
P(z)
H(z)
X(k)
Y(k)
Figure 10 Structural diagram for classical FXLMS algorithm
Figure 11 The vibration control experimental platform
after running the control indicating that the overall vibrationis good
Although the experiment uses the external disturbancesignal simulated by the single-frequency signal on controlledstructure the actual vibration response of controlled struc-ture not only has the frequency of the excitation signalbut also contains a large number of harmonic componentsThere are two reasons for the resulting phenomenon Firstit is caused by the coupled response of the vibration modalstructure second it is caused by the way of bonding of piezo-electric patches and the impure excitation signal Figure 15shows power comparison for the overall structure vibrationbefore and after control It can be seen from the figurethat the amplitude of the excitation frequency has beensignificantly reduced Additionally from the standpoint ofnoise control while suppressing the structure vibration thenoise caused by structure vibration radiation also reducesIndividual component response of harmonic frequency hasbeen enhanced after control which is caused by the dig-ital controller quantized noise and the piezoelectric driveitself
In order to verify the superiority of the algorithm pro-posed in this paper the genetic algorithm (GA) and particleswarm optimization algorithm are used to optimize theobjective function And the sensor and actuator configu-ration scheme is established The vibration control exper-imental platform is established Using the same vibration
Table 5 Comparison of vibration suppression rate with that ofdifferent optimization algorithm
Channel 1 Channel 5 Channel 10 Totalchannels120578119881 (GA) 803 786 842 805120578119881 (PSA) 564 549 608 582
control algorithm the vibration control experiment data areanalyzed And the vibration suppression effect is shown inTable 5 in which 120578119881 = (1198851198811 minus 1198851198812)1198851198811 times 100 where120578119881 is for suppressing the vibration rate 1198851198811 is the vibrationamplitude before control and 1198851198812 is the vibration amplitudeafter control according to Table 5 it can be concludedthat the proposed algorithm has better vibration controleffect
7 Conclusion
The locations of sensors and actuators have large impacton the control system performance Therefore an optimalallocation method of piezoelectric sensor and actuator isproposed based on particle swarm algorithm in the paper Anexperimental platform was established and the experimentalresults indirectly verified the feasibility and effectiveness ofthe proposed method Comparison of vibration suppressionrate with that of different optimization algorithm shows thatgenetic algorithm is better than particle swarm algorithmfor optimal configuration problem of piezoelectric actua-tors and sensors The method proposed in this paper islimited to configuration of distributed sensors and actua-tors
Conflicts of Interest
All authors declare that there are no conflicts of interestregarding the publication of this paper
10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
minus5
0
5A
mpl
itude
(V)
12 146 8 102 40Time (S)
(a)
minus10
minus5
0
5
10
Am
plitu
de (V
)
10 12 1484 620Time (S)
(b)
Figure 12 (a) Time history of the vibration response of channel 2 (b) Time history of the control voltage output of channel 2
minus5
0
5
Am
plitu
de (V
)
2 4 6 8 10 12 140Time (S)
(a)
2 4 6 8 10 12 140Time (S)
minus10
0
10
Am
plitu
de (V
)
(b)
Figure 13 (a) Time history of the vibration response of channel 8 (b) Time history of the control voltage output of channel 8
0
2
4
6
8
MSE
(V)
2 40 8 10 12 146Time (S)
Figure 14 Effect diagram of the total structure vibration response
Without imposing controlImposing control
0
1
2
3
Pow
er sp
ectr
um (d
B)
20 40 60 80 1000Frequency (Hz)
Figure 15 Comparison diagram of structural vibration powerspectrum without control and imposing control
Acknowledgments
This research is supported by the National Nature Sci-ence Foundation of China (no 61403123 no 51575329 and
no 61525305) Technological Innovation Talents Projectsof Henan Universities (no 17HASTIT020) The Scienceand Technology Project Henan Province (no 162102210099no 162102310081 and no 172102210205) Youth BackboneTeacher Project Henan Province (no 2016GGJS153) andShanghai Rising-Star Program (no 17QA1401500)
References
[1] M I Frecker ldquoRecent advances in optimization of smartstructures and actuatorsrdquo Journal of Intelligent Material Systemsand Structures vol 14 no 4-5 pp 207ndash216 2003
[2] I Bruant L Gallimard and S Nikoukar ldquoOptimal piezoelectricactuator and sensor location for active vibration control usinggenetic algorithmrdquo Journal of Sound and Vibration vol 329 no10 pp 1615ndash1635 2010
[3] G Caruso S Galeani and L Menini ldquoOn actuatorssensorsplacement for collocated flexible platesrdquo in Proceedings of the11thMediterranean Conference on Control and Automation p 6Rhodes Greece 2003
[4] K R Kumar and S Narayanan ldquoThe optimal location ofpiezoelectric actuators and sensors for vibration control ofplatesrdquo Smart Materials and Structures vol 16 no 6 pp 2680ndash2691 2007
[5] K R Kumar and S Narayanan ldquoActive vibration control ofbeams with optimal placement of piezoelectric sensoractuatorpairsrdquo Smart Materials amp Structures vol 17 no 5 pp 1726ndash17312008
[6] A K Rao K Natesan M S Bhat and R Ganguli ldquoExperimen-tal demonstration of Hinfin control based active vibration sup-pression in composite fin-tip of aircraft using optimally placed
Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
piezoelectric patch actuatorsrdquo Journal of Intelligent MaterialSystems and Structures vol 19 no 6 pp 651ndash669 2008
[7] S R Viswamurthy and R Ganguli ldquoOptimal placement oftrailing-edge flaps for helicopter vibration reduction usingresponse surface methodsrdquo Engineering Optimization vol 39no 2 pp 185ndash202 2007
[8] S R Viswamurthy and R Ganguli ldquoOptimal placement ofpiezoelectric actuated trailing-edge flaps for helicopter vibra-tion controlrdquo Journal of Aircraft vol 46 no 1 pp 244ndash253 2009
[9] RAManning ldquoOptimumdesign of intelligent truss structuresrdquoin Proceedings of the 32nd Structures Structural Dynamics andMaterials Conference pp 528ndash533 BaltimoreMDUSA April1991
[10] T-W Kim and J-H Kim ldquoOptimal distribution of an activelayer for transient vibration control of a flexible platerdquo SmartMaterials and Structures vol 14 no 5 pp 904ndash916 2005
[11] W Gao ldquoStochastically optimal active control of a smart trussstructure under stationary random excitationrdquo Journal of Soundand Vibration vol 290 no 3-5 pp 1256ndash1268 2006
[12] K C Xian Optimal actuators locations for adaptive structuresand structure optimization including discrete variables [PhDthesis] Beihang University Beijing China 2007
[13] S Liu and Z Lin ldquoIntegrated design optimization of voltagechannel distribution and control voltages for tracking thedynamic shapes of smart platesrdquo SmartMaterials and Structuresvol 19 no 12 Article ID 125013 2010
[14] S Honda I Kajiwara and Y Narita ldquoMultidisciplinary designoptimization for vibration control of smart laminated com-posite structuresrdquo Journal of Intelligent Material Systems andStructures vol 22 no 13 pp 1419ndash1430 2011
[15] R Dutta R Ganguli and V Mani ldquoSwarm intelligence algo-rithms for integrated optimization of piezoelectric actuator andsensor placement and feedback gainsrdquo Smart Materials andStructures vol 20 no 10 Article ID 105018 2011
[16] M AhariDesign optimization of an adaptive laminated compos-ite beam with piezoelectric actuators [Dissertation MS thesis]Concordia University Montreal Quebec 2005
[17] W Y Wang Y J Wei C Wang and Z Z Zou ldquoModelingand optimal vibration control of conical shell with piezoelectricactuatorsrdquo High Technology Letters vol 14 no 4 pp 418ndash4222008
[18] W Gawronski and K B Lim ldquoBalanced actuator and sensorplacement for flexible structuresrdquo International Journal of Con-trol vol 65 no 1 pp 131ndash145 1996
[19] Q Huang J Luo H Li and X Wang ldquoAnalysis and implemen-tation of a structural vibration control algorithm based on anIIR adaptive filterrdquo Smart Materials and Structures vol 22 no8 Article ID 085008 2013
[20] Q Z Huang X J Zhu Z Y Gao S W Gao and E Y JiangldquoAnalysis and implementation of improved multi-input multi-output filtered-X least mean square algorithm for active struc-tural vibration controlrdquo Structural Control and Health Monitor-ing vol 20 no 11 pp 1351ndash1365 2013
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of