Embed Size (px)
Citation preview

ORIGINAL ARTICLE
Optimal location of workstations in tandem automated-guidedvehicle systems
Amir Salehipour & Mohammad Mehdi Sepehri
Received: 18 November 2011 /Accepted: 31 January 2014# Springer-Verlag London 2014
Abstract The way workstations are located in a tandemautomated-guided vehicle (AGV) systems affect the totallateness of the system. So far, almost all studies have focusedon either minimizing the total flow or minimizing the totalAGV transitions in each zone. This study presented a novelapproach to locate the workstations in a tandem AGV zonesby developing a new mixed-integer programming (MIP) for-mulation. The objective is to minimize total waiting time of allworkstations which is equivalent to minimizing the total late-ness of each zone. Lateness is defined as the total idle time of aworkstation waiting to be supplied by an AGV. The proposedMIP formulation is very competitive and has the capability tosolve instances of up to 25 workstations to optimality in areasonable amount of time.
Keywords Zoneworkstation layout . TandemAGV .Waitingtime . Total cumulative flow
1 Introduction
Designing efficient handling systems is one of the most im-portant issues in facility design. Tompkins et al. showed thatbetween 20 and 50 % of the overall operational costs was dueto material handling [1]. An improvement in the handlingsystem is automated-guided vehicles (AGVs), which are
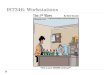
considered as advances to the traditional material handlingsystems. An AGV is a driverless vehicle which transportsmaterials within a manufacturing area partitioned into cells[1]. The AGV has the advantages of routing flexibility, spaceutilization, safety, and reduction in overall operating cost [2].These advantages have led to implementation of AGV inmanufacturing and warehousing environments, especiallywhere complex parts are involved with multiprocessing oper-ations. The tandem AGV concept was introduced by Bozerand Srinivasan [3–5]. They defined this system on a gridlayout where each workstation is presented as a single pointand may represent a machine, or a group of machines, such asa cell or a department. In the tandem AGV system, theworkstations are partitioned in such a way that each stationis assigned to only one zone where an AGVoperates (Fig. 1).In Fig. 1, the circles represent the workstations, and the solidlines represent the guided path of an AGV. The boxes next toeach workstation show the input/output to/from each work-station.We refer interested readers to [3–5] for more details onthe tandem AGV system.
We can break the problem of designing a tandem AGVsystem into following five problems:
& Decision on the number of required zones, and hence, thenumber of AGVs (problem 1).
& Dividing up workstations into zones, i.e., workstationpartitioning (problem 2).
& Determining workstation layout in each zone, i.e., theoptimal location of workstations (problem 3).
& Optimal location of transition points between each twozones (problem 4).
& Design of AGVs routes’ direction, i.e., clockwise or coun-terclockwise (problem 5).
This study focuses on problem 3. Its major contribution isto solve this problem to optimality and to minimize the total
A. SalehipourSchool of Mathematics and Physical Sciences, The University ofNewcastle, University Drive, Callaghan, NSW 2308, Australiae-mail: [email protected]
M. M. Sepehri (*)Department of Industrial Engineering, Tarbiat Modares University,Tehran, Irane-mail: [email protected]
Int J Adv Manuf TechnolDOI 10.1007/s00170-014-5678-x

lateness of each zone incurred by delay in supplying worksta-tions. Research on the other four problems is rich enough; acomplete study into these problems, with the details onrouting and flow path design, fleet sizing, job and AGVscheduling, and the solution approaches is covered in [2].Among these, problem 1 is the most studied one [6–9]. Forproblem 2, Bozer and Srinivasan studied partitioning of work-stations into different zones [5]. They developed the firstheuristic for the problem. Wooyeon and Egbelu developed apartitioning heuristic based on variable path layout [10]. In[7], authors considered balancing flow in each zone, minimiz-ing the inter-zone flow, and the traveled distance of flow asthree different objective functions. Fahmy et al. proposed atwo-phase algorithm for partitioning workstations with thethree objectives of minimizing the total cost of material flow,minimizing maximum workload, and minimizing the numberof transitions in zones [11]. Shalaby et al. developed the ideagiven in [11]. The first phase of their workstation partitioningalgorithm generates and evaluates zones. In the second phase,an integer programming (IP) formulation is developed, tochoose the best possible combination of zones [12].Elmekkawy and Liu proposed a memetic algorithm to parti-tion tandem AGV systems with the objective of minimizingthe maximum AGVs’workload (in order to balance the work-load among all zones) [13]. In [8] and [9], the authors pre-sented a mixed-integer programming (MIP) formulation tolocate the workstations in zones. The objective is to minimizetotal flow. They developed a metaheuristic solution procedureto solve the model. The most relevant and important studieson problem 5 are [14–17]. In [16] and [17], the authors studiedthe design of material flow handling systems with respect tothe pickup/drop off (P/D) points. Asef-Vaziri and Laportehave provided a complete survey on this problem [18]. Al-though, most of the studies on these problems carried outoptimization and heuristic routines to find solutions, re-searchers have also used simulation to study and to analyzeimplementation and operational issues of AGV. Kim providedsuch a modeling environment [19]. Choi [20] and Um [21]separately used discrete event simulation to analyze variousoperational issues including number of vehicles needed, AGVspeed, job assignment rules, and job arrival distribution.
The most important studies addressing problem 3 are dueto Hsieh and Sha who developed an algorithm for partitioning
and locating workstations in each zone by modifying anapproximation solution for the k-TSP [6], Gadmann and Veldewho studied the problem of finding the best location of work-stations in a zone using an AGV with P/D points [22], andKim and Jae who found the final tandem path using apartitioning algorithm [19]. It is worth mentioning that, inthese studies, different objective functions than minimizingtotal lateness of all workstations (in a zone) have been con-sidered. Minimizing total lateness criterion measures the idletime of each workstation and can be of importance when, forinstance, the efficiency and productivity measures of a zoneare a primary. Recently, Salehipour et al. considered heuristicsolutions for the problem. Although, their VNS-basedmetaheuristic provided very high-quality solution, no discus-sion regarding optimality was provided [23].
In this study, we focus on locating workstations in eachtandem AGV zone such that total lateness of all workstationsis minimized. For this purpose, a MIP formulation, capable ofderiving optimal solutions for real-size problems, is devel-oped. The remainder of this paper is organized as follows. InSection 2, we give an exact definition of the problem understudy together with the notations used in the study. InSection 3, we develop a MIP formulation for the problem.Section 4 is devoted to the computational experiments. As thecomputational experiments show, optimal solutions can bederived for instances of up to 20 workstations. Furthermore,we provided very promising solutions for instances with 25workstations in a reasonable amount of time. The computa-tional results demonstrate that the developed MIP formulationis very competitive. A real application of the problem in healthcare is illustrated in Section 5. The application is on minimiz-ing the traveling time when delivering linen from laundry tohospitals’ departments. The paper ends with Conclusion.
2 Problem formulation
In this section, we give an exact definition of problem 3 withrespect to the new objective function criterion, namely that ofminimizing total cumulative flow. We also discuss in brief theavailable mathematical models which can be applied to prob-lem 3 considering this objective function. As the state-of-the-art mathematical models are not capable of deriving optimalsolutions for instances with as few as 12 workstations, wedevelop a MIP model for problem in Section 3.
2.1 Notations
We assume that the flow between every two arbitrary work-stations, i and j, consists of the total material transshipped bythe AGV plus the total travel distance required for the AGV totravel fromworkstation i to workstation j. We also assume that0, the initial position of the AGV, is the transition point and
Zone 2
Zone 3
Zone 4
Zone 5Zone 1
Fig. 1 A tandem AGV system [3]
Int J Adv Manuf Technol

hence is a dummy workstation (transition points are whereflow is transferred between two adjacent zones). Notations areas follows.
I Set of all workstations, where I={0,1,…,n}, and 0∈I isAGV’s home; |I|=n+1.
li Lateness of workstation i∈I, where l0=0.Fπ Objective function value (for permutation π, where
π={π0,…,πu,…,πn}) which is the total cumulativeflow.
xij Binary decision variables taking 1 if AGV travels fromworkstation i to workstation j and 0 otherwise (i,j∈I, i≠j).
yij Integer decision variables taking n−u+1, if workstationj is located immediately after workstation i in order uwhere πu∈π, and 0, otherwise (i,j∈I, i≠j). By order, wemean, if, for instance, workstation i is immediatelylocated after transition point, thus it is in order 2 (as thetransition point is always in order 1) or π={π0,πi,…},and is the first workstation visited by the AGV.
puj Binary decision variables taking 1 if workstation j∈I isvisited in order u∈π and 0 otherwise.
F Flow matrix, where non-negative element fij,i,j∈I,i≠jstates the amount of flow from workstation i to work-station j.
2.2 Problem statement
As mentioned earlier, zone workstation layout in a tandemAGV system has almost focused either on minimizing thetotal flow among workstations in each zone ([6] and [22]) oron minimizing the total transitions among workstations ineach zone [7]. However, there is a lack of study regardingminimizing the total cumulative flow among workstations ineach zone. This criterion targets the lateness concept ratherthan the traditional cost concept appeared in previous studies.The lateness can be implemented to measure the effectivenessand efficiency of a zone layout.
Given a graph G(V,E,w), the problem of this study can beformulated as allocating the workstations to V such that the totalcumulative of w is minimized. V is the set of available locationsthat workstations can be allocated to, and E is the set of alledges connecting the workstations. Typically, there is an edgebetween two workstations if any flow of material from one toanother is evident. Here, w is the weights of the edges in G.Intuitively, w is the amount of flow among workstations. Othermeasures such as traveling cost or distance between worksta-tions can be considered as well. Furthermore, w can be anycombination of these measures. Given a set of workstations Iand a flow matrix F, a solution for the problem is a tour with apermutation of π={π0,…,πu,…,πn}, where each element isassociated with a location of a unique workstation i∈I.
For a better understanding of the problem, we explain asmall example from [23]. This small problem has five
workstations. The purpose of the example is to illustrate morethe problem and the way servicing workstations may changethe objective function value. Later in Sections 4 and 5, weprovide computational experiments for larger problems and areal application of the problem, respectively. Without loss ofgenerality, assume that we have converted the amount of flowtransitions, their associated costs, etc. to their equivalent traveldistance criterion and that this is our only component of theobjective function. Figure 2 shows these travel distances in atravel distance matrix (equivalently flow matrix). We hold 0for the initial position (home/transition point) of AGV. Wedefine the Lateness of a workstation as total distancetraveled by AGV to reach this workstation from thetransition point. For instance, according to Fig. 3a andthe travel distance matrix given in Fig. 2, the latenessof workstation 1 would be 7.
Similarly, the lateness of workstation 2 would be the late-ness of workstation 1 (as workstation 2 cannot be visited anysooner than workstation 1) plus the travel distance fromworkstation 1 to workstation 2. Thus,
l2 ¼ l1 þ f 12 ¼ 7þ 5 ¼ 12
According to this lateness criterion, problem 3 is to locateworkstations in a way that the total lateness (equivalentlywaiting times) of all workstations is minimized. This problemcan be modeled within the framework of the traveling repair-man problem (TRP). The TRP has been proved to be NP-hard[24] and even more difficult than the TSP [25]. Fischetti et al.[26] and Eijl [27] have developed two MIP formulations forthe TRP. Recently, Sarubbi and Luna presented another MIPformulation at the International Network Optimization Con-ference in 2007 [28]. It was derived by extending Fischettiet al.’s model [26] with extra side constraints. However, theirmodel still lacked certain sets of constraints and resulted ininfeasibility. Thus, we avoid reporting it, and the associatedcomputational experiments in Section 4, where we will showFischetti et al.’s [26] and Eijl’s [27] models cannot be solvedin a reasonable amount of time even for small instances withsize of 12 workstations. However, the MIP formulation pre-sented in Section 3 is capable of deriving optimal solutions for
0 1 2 3 4 5
0
1
2
3
4
5
0
-
-
-
-
-
7
0
-
-
-
-
6
5
0
-
-
-
9
14
7
0
-
-
12
9
6
9
0
-
3
2
10
8
4
0
Fig. 2 The travel time matrix of examples in Fig. 3
Int J Adv Manuf Technol

practical instances of up to 20 workstations in a reasonableamount of time.
In fact, what we are interested in is to decide how tolocate the workstations so as to minimize the totalcumulative flow among them. We illustrated an exampleof such a location decision in Fig. 3a, where AGV (theblack rectangle) first visits workstation 1, then worksta-tion 2, etc. Thus, a permutation would be π3a={0,1,2,3,4,5}. Figure 3b represents another permutation wherethe order of visiting workstations by AGV has changedand is π3b={0,5,1,2,4,3}. As the calculation belowshows, the permutation π3b has a lower objective func-tion value than the permutation π3a.
Fπ3a ¼X n
i¼0li ¼ 7ð Þ þ 7þ 5ð Þ þ 7þ 5þ 7ð Þ
þ 7þ 5þ 7þ 9ð Þ þ 7þ 5þ 7þ 9þ 4ð Þþ 7þ 5þ 7þ 9þ 4þ 3ð Þ ¼ 133
Fπ3b¼X n
i¼0li ¼ 3ð Þ þ 3þ 2ð Þ þ 3þ 2þ 5ð Þ
þ 3þ 2þ 5þ 6ð Þþ 3þ 2þ 5þ 6þ 9ð Þ
þ 3þ 2þ 5þ 6þ 9þ 9Þ ¼ 93ð
Thus, the permutation π3b outperforms permutation π3a.Note that, here, a solution is a closed tour of AGV
trip (starting from 0 and ending in 0) represented by apermutation of the workstations: π={π0,…,πu,…,πn}.Assume that the solution π={0,1,2,…,n} with 1 is thesecond workstation in the solution, 2 the third, and soon. The total lateness (equivalently waiting time) forthis solution can be calculated as
Fπ ¼X n
i¼1li ð1Þ
where,
li ¼X j≤ i
j¼1f j−1; j ð2Þ
This calculation is equivalent to the more intuitive one inwhich the lateness (waiting time) of the workstations in thesolution are summed:
Fπ ¼X n
i¼1nþ 1ð Þ−iþ 1ð Þ f i−1;i þ f n;0 ð3Þ
Equation 3 offers the advantage of making the calculationsmuch easier when, for example, workstations are added ordeleted.
3 The mixed-integer programming formulation
In this section, the major contribution of this paper isdescribed by introducing a MIP formulation for the prob-lem (Model 1). Based on this formulation, a property ofModel 1 is explored. Embedding this property into Model1 yields a strong formulation in terms of computationaltime and solution quality. In particular, the property re-duces the computational time of reaching the optimalityby at least 70 %.
Model 1
Minimize z ¼X n
i¼0
X n
j¼0f ij:yij ð4Þ
Subject to
X n
i¼0xij ¼ 1 ∀ j ∈ I ; j ≠ 0 ð5Þ
X n
j¼0xij ¼ 1 ∀i ∈ I ; i ≠ 0 ð6Þ
X n
i¼1xi0 ¼ 1 ð7Þ
X n
i¼1x0 j ¼ 1 ð8Þ
1
4
5
2
30 0
5
4
3
1
2
7 5 7
9
3
3 2 5
694
9
a bFig. 3 Two examples of tandemAGV systems in whichworkstations are arrangeddifferently. Note that theconfiguration presented in a has aworse objective function than theone in b (figure is from [23])
Int J Adv Manuf Technol

X n
j¼0y0 j ¼ nþ 1 ð9Þ
X n
j¼0y j0 ¼ 1 ð10Þ
X n
i¼0yi0−
X n
j¼0y0 j ¼ 1− nþ 1ð Þ ð11Þ
X n
i¼0yik−
X n
j¼0ykj ¼ 1 ∀k ∈ I ; k ≠ 0 ð12Þ
X n
i¼0
X n
j¼0yij ¼
X nþ 1
t¼1t ð13Þ
yij≤ nþ 1ð Þ:xij ∀i; j ∈ I ð14Þ
xij ∈ 0; 1f g ∀i; j ∈ I ð15Þ
yij≥0 ∀i; j ∈ I ð16Þ
X n
i¼0pij ¼ 1 ∀ j ∈ I ð17Þ
X n
j¼0pij ¼ 1 ∀i ∈ I ð18Þ
p00 ¼ 1 ð19Þ
X n
j¼0pnj ¼ 1 ð20Þ
X n
k¼0yjk− nþ 1− iþ 1ð Þð Þ: pij ≥ 0 ∀ j ∈ I ;∀ i ∈ π ð21Þ
pij∈ 0; 1f g ∀ j∈I ;∀i∈π ð22Þ
Constraints (5) and (6) are the assignment problem con-straints that ensure every workstation is visited exactly once.Redundant constraints (7) and (8) ensure that AGV starts fromhome and finishes at home. Redundant constraints (9) and(10) together with constraints (11), (12), and (13) define anetwork flow problem to remove subtours, i.e., ensuring fea-sibility of solutions. Constraint (14) links the variables xij tovariables yij. The fact that all xij and yij variables are binary andnon-negative, respectively, is assured by constraints (15) and(16). The constraints (17) to (22) are scheduling constraintsworking according to the visiting order of the workstations.Constraints (17) and (18) ensure that there is only one work-station visited in each position and vice versa. Constraints (19)
and (20) ensure that AGV starts from transition point and goesback to this point at the end of its service. Constraints (21) linkvariables yij to variables pij. The fact that all pij are binary isassured by constraints (22).
In Model 1, constraints (5)–(6), (10)–(12), and (14)are from [26]. The remaining constraints are developedbased on introducing the new binary variables puj,∀ j∈I,∀u∈π, in a way to strengthen the formulation. Weshould note that the model of Eijl [27] is fundamentallydifferent from both model of Fischetti et al. [26] andModel 1. Eijl’s underlying idea is to take the lateness ofa workstation as a nonnegative decision variable. Aswill be shown in computational experiments, Model 1can solve larger instances to optimality than modelsproposed by [26, 27]. Despite this, Corollary 1 exploresa set of valid inequalities of problem which improvedModel 1 in terms of solution quality. Without benefit-ting from these valid inequalities, Model 1 can stillderive optimal solutions for instance with up to 20workstations; however, the valid inequalities reduce thecomputational time by at least 70 %.
Corollary 1 Valid inequalities (21) can be replaced by validinequalities (23),
X n
k¼0xik−
X n
j¼0pji≥0;∀i∈I ð23Þ
Proof We prove this corollary in two parts. In the first part, weprove the correctness, and in the second part we prove itseffectiveness.
Valid inequalities (21) which link variables yij and pijare binding constraints. Thus, relaxing them would resultin a lower bound for the problem (the problem is mini-mization). Furthermore, relaxing valid inequalities (21)results in constraints (17) through (22) to be uselessbecause there is no relation between yij and pij, and thatpij are not included in the objective function. Valid in-
equalities ∑n
k¼0xik−∑
n
j¼0pji≥0;∀ i∈I are valid because
the first term is 1 by constraints (6) and the second term isalso 1 by constraints (17). Furthermore, they maintain therelation between all decision variables. Thus, the first partof the proof is complete.
Regarding the effectiveness of the valid inequalities
∑n
k¼0 xik−∑n
j¼0pji≥0;∀ i∈I , we refer to the computational
results. According to the result, replacing valid inequalities (21) inModel 1 by valid inequalities (23) yields to optimal solutions forlarger problems of up to 25 workstations. Furthermore, it reducesthe computational time by at least 70%. For the sake of simplicitywe introduceModel 2, by replacing valid inequalities (21) by (23).
Int J Adv Manuf Technol

Model 2
Minimize z ¼X n
i¼0
X n
j¼0f ij:yij ð4Þ
Subject to (5)–(20), (22), and (23)
4 Computational experiments
In this section, we provide detailed computational experi-ments of the two MIP formulations provided in Section 3(models 1 and 2). Furthermore, to evaluate the performanceof proposed MIP formulations against state-of-the-art models,we also report the computational experiments of those by [26,27]. Thus, totally we report the results over four mathematicalformulations. All the computational experiments were carriedout on a Pentium 4 PC with 1 GB of memory and 2.0 GHz ofCPU. We employed commercial solver ILOG Cplex 9.0.
A set of 50 random instances were generated with sizesranging from 10 to 25 workstations (for each size, 10 problemswere generated) [23].We should note that a single zone with 25workstations is rather unrealistic. However, we give computa-tional results for instances with 25 workstations to demonstratethe competiveness of our MIP formulation. For each problem,flow among workstations have been generated randomly usinguniform distribution in [1,50]. Table 1 shows the general detailsof the instances generated.
Table 2 reports the computational results of the four math-ematical formulations over the instances of Table 1. Thecolumn Obj shows the objective function value, i.e., the totalminimized cumulative flow. The column Time’is the CPUtime in seconds taken by the Cplex to solve each instance.The column GAP shows the reported gap in percent by thesolver. This gap is calculated from the lower bound derived bythe Cplex over the best objective function found, again by theCplex. The Cplex proves optimality of the solution by usingthis gap. Thus, this gap can be a measure regarding thestrength of the formulation as the convergence rate of thisgap towards 0 % in a reasonable amount of computationaltime would be of importance. It is worth mentioning thatModel 2 yielded a gap of 0 % for all instance sizes of up to
20 workstations and an average gap of 7.98 % (below 10 %)for instances with 25 workstations (see Table 2).
According to the table, themodels proposed by Fischetti et al.[26] and Eijl [27] exhibit nearly the same performance forinstances with 10 workstations. However, models 1 and 2appear to solve the instances in less time than those previousmodels. A look at larger instances reveals the strength of models1 and 2, and especially that of Model 2. This can simply beestablished by examining the results of instances with 10 to 20workstations solved by models 1 and 2. Although, models of[26, 27] are able to find optimal solutions for nine instances outof 10with 15workstations, theywere unable to prove optimalityof these solutions after 1,000 s, except for only two problems ofsize 15 where optimality of the solutions by Fischetti et al.’smodel were proved. This even goes worse when dealing withinstances with 18 and 20 workstations; models found optimalsolutions (again without any proof of optimality) only for oneinstance with 18 workstations, and none for instances with 20workstations (again after 1,000 s of running time). Furtherinvestigation revealed that these two models are incapable ofyielding optimality proof for any of the problems with 18workstations or larger and for almost none of the problems with15 workstations after 3 h of running time. Besides, the averagegap over the generated instances obtained by models of [26, 27]was very high. Note that according to the computational results,both models 1 and 2 are at least eight times faster compared tothose of Fischetti et al. [26] and Eijl [27]; especially, Model 2 isapproximately four times faster than Model 1 (see Fig. 4). Thisadvantage of Model 2 must be coupled with the fact that it isadditionally strong enough to find proven optimal solutions forall instances of up to 20 workstations.
In solving instances with 20 workstations, the perfor-mance of Model 1 deteriorated as its average gap overthis set of instances reached 17.92 %, while only twoproven optimal solutions were reported. On the otherhand, the performance of Model 2 on this set of instanceswas better as it was capable of deriving proven optimalsolutions for all instances in about 5 min on the average.Table 2 reveals the high performance of Model 2 insolving instances with 25 workstations. For this set ofinstances, Model 2 proved optimal solutions for two in-stances out of 10, and reached an average gap of 7.98 %in 895.39 s (see Fig. 5). Generally, the more difficult theproblems are to solve, the more computational time theyrequire. This is why the computational gap increases as ameasure of problem difficulty. Due to the high computa-tional time and the large gap associated with Model 1 andthose proposed in [26, 27], we avoided reporting theircomputational results for instances with 25 workstations.
When comparing these four models, another good eval-uation criterion would be the total number of provenoptimal solutions found by each of these four models.Clearly, the most efficient model of the four is Model 2.
Table 1 Details of generated instances [23]
Number of workstation Instance name Flow generation mechanism
10 TAGV-10-S Random in [1,50]
15 TAGV-15-S Random in [1,50]
18 TAGV-18-S Random in [1,50]
20 TAGV-20-S Random in [1,50]
25 TAGV-25-S Random in [1,50]
Int J Adv Manuf Technol

Table 2 The computational results of the four mathematical models on the generated instances
Size Instance name Model of Fischetti et al. [26] Model of Eijl [28] Model 1 Model 2
Obj. Time GAP Obj. Time GAP Obj. Time GAP Obj. Time GAP
10 TAGV-10-S1 384 18.84 0 384 10.16 0 384 11.22 0 384 9.92 0
TAGV-10-S2 445 18.36 0 445 17.56 0 445 4.92 0 445 3.98 0
TAGV-10-S3 663 319.97 0 663 159.34 0 663 12.27 0 663 8.70 0
TAGV-10-S4 400 21.45 0 400 17.55 0 400 2.39 0 400 6.92 0
TAGV-10-S5 365 22.41 0 365 48.11 0 365 3.80 0 365 12.98 0
TAGV-10-S6 533 84.25 0 533 44.80 0 533 14.23 0 533 13.66 0
TAGV-10-S7 657 250.77 0 657 244.92 0 657 2.30 0 657 9.88 0
TAGV-10-S8 319 20.38 0 319 28.05 0 319 7.92 0 319 5.78 0
TAGV-10-S9 497 26.44 0 497 28.39 0 497 3.11 0 497 11.44 0
TAGV-10-S10 460 56.20 0 460 25.27 0 460 21.83 0 460 10.16 0
Average 83.51 0 62.41 0 8.40 0 9.34 0
15 TAGV-15-S1 899 1,000a 30.41 899 1,000a 57.21 889 414.89 0 889 43.27 0
TAGV-15-S2 814 1,000a 8.11 814 1,000a 54.46 814 378.11 0 814 35.02 0
TAGV-15-S3 483 594.13 0 483 1,000a 40.82 483 84.16 0 483 46.89 0
TAGV-15-S4 1,022 1,000a 30.72 1,022 1,000a 62.44 1,022 345.77 0 1,022 57.14 0
TAGV-15-S5 586 1,000a 26.85 586 1,000a 54.49 586 260.58 0 586 175.58 0
TAGV-15-S6 578 511.61 0 578 1,000a 43.76 578 68.34 0 578 43.61 0
TAGV-15-S7 873 1,000a 15.78 873 1,000a 55.69 873 162.86 0 873 32.22 0
TAGV-15-S8 740 1,000a 9.54 740 1,000a 53.74 740 281.64 0 740 85.09 0
TAGV-15-S9 840 1,000a 27.32 840 1,000a 50.75 808 630.13 0 808 104.91 0
TAGV-15-S10 688 1,000a 3.21 688 1,000a 36.32 688 171.22 0 688 48.06 0
Average 910.57 15.19 1,000 50.97 279.77 0 67.18 0
18 TAGV-18-S1 1,105 1,000a 41.82 1,105 1,000a 65.57 1,105 1,000 10.52 1,098 255.63 0
TAGV-18-S2 1,177 1,000a 49.02 1,177 1,000a 64.18 1,225 1,000 32.42 1,036 95.78 0
TAGV-18-S3 1,045 1,000a 49.2 1,045 1,000a 70.25 895 513.36 0 895 43.89 0
TAGV-18-S4 1,008 1,000a 34.15 1,008 1,000a 63.34 998 795.52 0 998 61.00 0
TAGV-18-S5 847 1,000a 30.2 847 1,000a 63.15 833 1,000 6.23 833 163.77 0
TAGV-18-S6 677 1,000a 16.91 677 1,000a 58.44 666 412.44 0 666 52.41 0
TAGV-18-S7 915 1,000a 39.83 915 1,000a 65.6 897 648.98 0 897 111.56 0
TAGV-18-S8 996 1,000a 40.39 996 1,000a 73.43 963 625.58 0 963 57.97 0
TAGV-18-S9 834 1,000a 26.11 834 1,000a 57.8 834 522.61 0 834 35.52 0
TAGV-18-S10 823 1,000a 39.94 823 1,000a 56.14 841 1,000 21.96 763 141.33 0
Average 1,000 36.76 1,000 63.79 751.85 7.11 101.88 0
20 TAGV-20-S1 1,001 1,000a 46.77 1,001 1,000a 64.74 978 1,000a 9.84 970 161.81 0
TAGV-20-S2 856 1,000a 49.22 856 1,000a 70.23 807 1,000a 15.7 807 85.19 0
TAGV-20-S3 1,067 1,000a 55.08 1,067 1,000a 76.86 1,076 1,000a 25.5 981 356.41 0
TAGV-20-S4 1,301 1,000a 55.73 1,301 1,000a 76.19 1,215 1,000a 9.35 1,215 342.55 0
TAGV-20-S5 917 1,000a 59.05 917 1,000a 68.15 1,061 1,000a 37.15 805 134.50 0
TAGV-20-S6 786 1,000a 53.52 786 1,000a 68.51 736 1,000a 16.05 717 289.34 0
TAGV-20-S7 1,076 1,000a 47.37 1,076 1,000a 69.17 1,126 1,000a 28.39 1,006 829.78 0
TAGV-20-S8 1,261 1,000a 62.28 1,261 1,000a 62.93 1,015 1,000a 8.93 996 214.41 0
TAGV-20-S9 1,025 1,000a 53.3 1,025 1,000a 78.29 1,130 1,000a 20.91 1,022 457.25 0
TAGV-20-S10 927 1,000a 44.97 927 1,000a 72.22 911 1,000a 7.33 901 161.78 0
Average 1,000 52.73 1,000 70.73 1,000 17.92 319.02 0
25 TAGV-25-S1 – – – – – – – – – 1,243 1,000a 4.67
TAGV-25-S2 – – – – – – – – – 1,899 1,000a 17.55
TAGV-25-S3 – – – – – – – – – 1,019 719 0
Int J Adv Manuf Technol

83.51
910.57
1000.00
62.41
1000.00 1000.00
279.77
751.85
1000.00
319.02
895.39
0
200
400
600
800
1,000
1,200
0 10 20 30 40 50 60 70 80
Tim
e (s
econ
ds)
GAP (%)
Fischetti, 1993
Eijl, 1995
Model 1
Model 2
Fig. 5 Computational time vs.GAP (in percentage)
83.51
910.57
62.41
1000.00 1000.00 1000.00
8.40
279.77
751.85
9.3467.18
101.88
319.02
895.39
0
200
400
600
800
1000
1200
10 15 18 20 25
Tim
e (s
econ
ds)
Number of Workstations
Fischetti et al., 1993
Eijl, 1995
Model 1
Model 2
Fig. 4 Performance of differentmathematical models
Table 2 (continued)
Size Instance name Model of Fischetti et al. [26] Model of Eijl [28] Model 1 Model 2
Obj. Time GAP Obj. Time GAP Obj. Time GAP Obj. Time GAP
TAGV-25-S4 – – – – – – – – – 1,014 234.94 0
TAGV-25-S5 – – – – – – – – – 1,044 1,000a 10.70
TAGV-25-S6 – – – – – – – – – 1,184 1,000a 10.55
TAGV-25-S7 – – – – – – – – – 1,645 1,000a 14.14
TAGV-25-S8 – – – – – – – – – 1,618 1,000a 5.17
TAGV-25-S9 – – – – – – – – – 1,769 1,000a 2.27
TAGV-25-S10 – – – – – – – – – 1,230 1,000a 14.71
Average 895.39 7.98
a The Cplex solver stops as soon as the CPU time reaches the limit 1,000 s
Int J Adv Manuf Technol

Finally, examination of the average gaps resulting fromcomputational experiments of Fischetti et al. [26] and Eijl[27] models revealed that Fischetti et al.’s model results ina lower gap, particularly when the problem size increases.
5 A real example in hospital linen delivery
An interesting application of the problem of this study is thehospital linen delivery. Dirty and used linen including clothsare collected and transported to the laundry department of thehospital frequently, typically several times a week. As Fig. 6illustrates, several operations are required in this process:washing and disinfecting, drying, repairing, ironing and pack-ing, and finally delivering to departments are typical opera-tions in this process.
Given the amount of linen and cloths that should becollected and delivered to each department, togetherwith the geographical locations of departments and thefrequency of the operation, it is important to schedulethe linen delivery such that the total delivery time isminimized; each department can be looked as a work-station, while the amount of linen transported, combinedwith the distance between departments and frequency ofthe transportation can form the flow among worksta-tions. Thus, the problem can be formulated in the con-cept of the location workstations using Model 2. Giventhe number of the hospital’s departments, Model 2 canbe solved to optimality in a reasonable amount of time,avoiding implementing heuristic as solutions proceduresfor the problem.
6 Conclusion
In this study, a MIP formulation was developed for locatingworkstations (zone workstation layout) in a tandem automated-guided vehicle system with the objective of minimizing thetotal cumulative flow (equivalently waiting time) among work-stations. In fact, this objective function measures the lateness oridle time of each workstation in the tandem AGV system. Weintroduced a set of valid inequalities for the problem. Replacingthese valid inequalities with a set of constraints in Model 1resulted in optimal solutions for all instances of up to 20workstations, and for several instances of up to 25 workstations(with an average gap of 7.98 %), which are very competitive.Our mathematical formulation outperformed those reported inthe literature thanks to its strength and the tight lower bounds.Finally, as we did not validate the results against a real system,this can be another path for future work.
Acknowledgments The authors would like to thank the anonymousreviewers for their valuable comments on the first version of the paper.
References
1. Tompkins JA,White JA, Bozer YA, Tanchoco JMA (2003) Facilitiesplanning, 3rd edn. Wiley, New York
2. Ganesharajah T, Hall NG, Sriskandarajah C (1998) Design andoperational issues in AGV-served manufacturing systems. AnnOper Res 76:109–154
3. Bozer YA, Srinivasan MM (1989) Tandem configurations for auto-mated guided vehicle systems offer simplicity and flexibility. Ind Eng21(2):23–27
4. Bozer YA, Srinivasan MM (1991) Tandem configurations for auto-mated guided vehicle systems and the analysis of single-vehicleloops. IIE Trans 23(1):72–82
5. Bozer YA, Srinivasan MM (1992) Tandem AGV systems: apartitioning algorithm and performance comparison with conven-tional AGV systems. Eur J Oper Res 63(2):173–192
6. Hsieh LF, Sha DY (1996) A design process for AGV systems: theconcurrent design of machine layout and guided vehicle routes intandem automated guided vehicle systems. Integr Manuf Syst 7(6):30–38
7. Ho YC, Hsieh PF (2004) A machine-to-loop assignment layoutmethodology for tandem AGVS with multiple-load vehicle. Int JProd Res 2(4):801–832
8. Tavakkoli-Moghddam R, Aryanezahd MBG, Kazemipoor H,Salehipour A (2008) Partitioning machines in tandem AGV systemsbased on “balanced flow strategy” by simulated annealing. Int J AdvManuf Technol 38:355–366
9. Tavakkoli-Moghddam R, Aryanezahd MBG, Kazemipoor H,Salehipour A (2008) A threshold accepting algorithm for partitioningmachines in tandem automated guided vehicle. Int J Eng Sci 19(1–2):33–42
10. Yu W, Egbelu PJ (2001) Design of variable path tandem layout forAGV. J Manuf Syst 20(5):305–319
11. Fahmy SA, Shalaby MA, Elmekkawy TY (2005) A multi-objectivepartitioning algorithm for tandem AGV system. 35th Int ConfComput Industrial Eng 715–720
Collectingfrom
departments
Separationand pre-
processing
Washing
DryingRepair
Ironing andpacking
Delivery todepartments
Fig. 6 Collection and delivery of linen in hospitals
Int J Adv Manuf Technol

12. Shalaby MA, Elmekkawy TY, Fahmy SA (2005) A cost basedevaluation of a zones formation algorithm in tandem AGV systems.Int J Adv Manuf Technol 31(1–2):175–187
13. Elmekkawy TY, Liu S (2009) A new memetic algorithm for optimiz-ing the partitioning problem of tandem AGV systems. Int J ProdEcon 118:508–520
14. Kaspi M, Kesselman U, Tanchoco JMA (2002) Optimal solution forthe flow path design problem of a balanced unidirectional AGVsystem. Int J Prod Res 40:349–401
15. Ko KC, Egbelu PJ (2003) Unidirectional AGV guide path networkdesign: a heuristic algorithm. Int J Prod Res 41:2325–2343
16. Asef-Vaziri A, Laporte G, Sriskandarajah C (2000) The block layoutshortest loop design problem. IIE Trans 32:724–734
17. Asef-Vaziri A, Dessouky M, Sriskandarajah C (2001) A loop mate-rial flow system design for automated guided vehicles. Int J FlexManuf Syst 13:33–48
18. Asef-Vaziri A, Laporte L, Ortiz R (2007) Exact and heuristic proce-dures for thematerial handling circular flow path design problem. EurJ Oper Res 176(2):707–716
19. Kim KS, Chung BD, Jae M (2003) A design for a tandem AGVSwith multi-load AGVs. Int J Adv Manuf Technol 22:744–752
20. Choi HG, Kwon HJ, Lee J (1994) Traditional and tandemAGV system layouts: a simulation study. Simulation 63(2):85–93
21. Um I, Cheon H, Lee H (2009) The simulation design and analysis ofa flexible manufacturing system with automated guided vehiclesystem. J Manuf Syst 28(4):115–122
22. Gadmann AGRM, Velde SL (2000) Positioning AGV in a looplayout. Eur J Oper Res 127:565–573
23. Salehipour A, Kazemipoor H, Moslemi Naeini L (2011) Locatingworkstations in tandem automated guided vehicle system. Int J AdvManuf Technol 52(3–4):321–328
24. Sahni S, Gonzales T (1976) P-complete approximation problems. JACM 23(3):555–565
25. Bianco L, Mingozzi A, Ricciardelli S (1993) The travelling salesmanproblem with cumulative costs. Networks 23(2):81–91
26. Fischetti M, Laporte G, Martello S (1993) The delivery man problemand cumulative matroids. Oper Res 41(6):1055–1064
27. Eijl E (1995) A polyhedral approach to the delivery man problem.Memorandum COSOT 95, Eindhoven University of Technology
28. Sarubbi JFM, Luna HPL (2007) A flow formulation for the minimumlatency problem. Int Network Optim Conf (INOC)
Int J Adv Manuf Technol