Embed Size (px)
Citation preview

Optimal Deployment Model for Near Space Bistatic Radar Network
Wang ShenShen 1,2,a, Che WanFang 2,b, Feng JinFu 1,c,
Wang FangNian3,d and Xie QiFeng3,e 1Engineering College, Air Force Engineering University, Xi’an 710038, China
2Key Lab of Complex Aviation System Simulation, Beijing 100076, China
3Guilin Air Force Academy, Guilin 541010, China
Keywords: Bistatic radar network; Optimal deployment; Particle swarm
Abstract. The optimal deployment model and algorithm for near space bistatic radar network are
discussed in this paper. Firstly, the coverage rate is analyzed, and the optimal deployment model is
established. Then, the standard particle swarm algorithm is improved. Initial position and velocity of
every particle are created by the chaos algorithm, and the individual and global extremes are disturbed
with some probability in the optimization, which are advantageous in achieving a faster and
globalized search of particles. Finally, the improved particle swarm algorithm is used to solve the
optimal deployment issue. Simulation results demonstrate the validity of the proposed model and
algorithm.
Introduction
Near space has widely attracted attention because of its importance in development and application.
Currently, stealth plane mainly aims at detection of monostatic radar from some special area.
Construction of near space netted bistatic radar can sufficiently utilize the limitation of stealth plane.
The changing of radar cross section (RCS) of stealth plane from side and above area can reach 20~30
dB along with changing of angle of view [1]. If netted bistatic radars with different frequency in near
space are used to detect stealth plane and the information is combined by the data processing centre,
the detection probability can be effectively improved. Although some radar has been jammed or failed
to detect certain area, other radars can provide information and get more information than single
monostatic radar in common detection area.
Optimal deployment of near space radar network is important in the detection system, which is
directly related to the distribution of the detection ability in the space. The aim of optimal deployment
is to decide the position of every radar station to achieve the optimal performance. Presently, the
optimal deployment issue has been discussed in many references and some useful strategies have been
provided [2-6]. However, the research object in most references is monostatic radar network. Optimal
deployment of bistatic radar network is different from that of monostatic radar network. This paper
establishes the optimal deployment model of near space bistatic radar network, and an improved
particle swarm algorithm is proposed to solve the optimization issue. Some useful conclusions can be
drawn from the simulation results.
Optimal Deployment Model for Near Space Bistatic Radar Network
Suppose that near space bistatic radar network is composed of I transmitters 1 2
( , , , )I
T T T� and J
receivers 1 2
( , , , )J
R R R� , the responsible area includes surveillance area S and some highly concerned
area C, or called core area, azimuth angle of the target is min max
[ , ]θ θ θ∈ , elevation angle of the target is
min max[ , ]ϕ ϕ ϕ∈ . Optimal deployment for near space bistatic radar network can be described as when
performance parameters and numbers of transmitters and receivers are fixed, deploying the positions
of transmitters and receivers reasonably to achieve the higher coverage rate.
Applied Mechanics and Materials Vols. 157-158 (2012) pp 273-276Online available since 2012/Feb/27 at www.scientific.net© (2012) Trans Tech Publications, Switzerlanddoi:10.4028/www.scientific.net/AMM.157-158.273
All rights reserved. No part of contents of this paper may be reproduced or transmitted in any form or by any means without the written permission of TTP,www.ttp.net. (ID: 130.194.20.173, Monash University Library, Clayton, Australia-10/03/13,22:09:46)

Coverage rate of radar network includes surveillance area coverage rate and core area coverage
rate. Surveillance area coverage rate is ratio between the surveillance area covered by radar network
and the surveillance area, and core area coverage rate is ratio between the core area covered by radar
network and the core area. As the target RCS changes with direction, whether the target can be
detected depends not only on the relative position of bistatic radar and the target, but also on the target
attitude. In order to make detection in core area has nothing to do with the target’s attitude, the
intersection of detection area corresponding to every attitude should be taken in core area coverage
computing. Surveillance area S and core area C can be divided into some sub-areas
{ ( ), 0,1,2, , }S t t I J= � and { ( ), 0,1,2, , }C t t I J= � , where ( )S t and ( )C t indicate the subarea with
overlap coefficient of t. Thus, we have [4]:
0
( )I J
t
S S t×
== ∪ , ( ) ( )S i S j φ=∩ ,
0
( )I J
t
C C t×
== ∪ , ( ) ( )C i C j φ=∩ , , , [0, ]i j i j I J≠ ∈ × . (1)
If being covered by T radars is regarded as effective coverage, the surveillance area coverage rate
and core area coverage rate of radar network are defined as:
[ ]( )
( )S
Volume S t T S
Volume Sη
≥=
∩,
[ ]( )
( )C
Volume C t T C
Volume Cη
≥=
∩. (2)
where ( )Volume i indicates the corresponding volume of the area; ( )S t T≥ and ( )C t T≥ indicate the
area with overlap coefficient of T. I transmitters and J receivers can form a total of I J× bistatic radar.
Suppose the k-th bistatic radar is composed of the ki -th transmitter and the
kj -th receiver, ( )S t T≥
and ( )C t T≥ are given by:
1 1
( )
TI J
t
C T
kk t
S t T S×
= =≥ = ∪ ∩ ,
max max
min min
( , )k kk i j
S Sθ ϕ
θ θ ϕ ϕθ ϕ
= == ∪ ∪ ,
1 1
( )
TI J
t
C T
kk t
C t T C×
= =≥ = ∪ ∩ ,
max max
min min
( , )k kk i j
C Sθ ϕ
θ θ ϕ ϕθ ϕ
= == ∩ ∩ . (3)
where T
I JC × is combination number of selecting T out of I J× ; 1 2, , , Tk k k� are the selected radar
number of the k-th combination; ( , )k ki jS θ ϕ is the detection area of the k-th bistatic radar related to
target with attitude ( , )θ ϕ . It is decided by the detection performance of bistatic radar and the RCS of
target, which can be obtained by the radar equation.
Since coverage rates of bistatic radar network have been calculated, optimal deployment model
can be established by minimizing the weighted sum of penalty functions:
1
,min ( , , , ) [ (1 ) (1 )(1 ) ]i j
c c c
S CD E R
L D E c w w wη η∈
= − + − − . (4)
where w and c are the weighted coefficient and weighted index; iD is position of the i-th transmitter
and jE is position of the j-th receiver; R is the range of position.
Improved Particle Swarm Optimization Algorithm
Improved particle swarm optimization algorithm is used to solve the optimal deployment issue. In
standard particle swarm optimization algorithm (PSO) [7], the speed and position of particle are given
by:
1 1 2() ( ) () ( )t t best t best tw r rand r rand+ = + − + −v v p x g xi i i i , 1t t t+ = +x x v . (5)
where w is inertia weight; 1r and 2r are acceleration constants; ()rand is a random number uniformly
distributed between 0 and 1; bestp is the best position of particle at time t; bestg is the global best
position at time t; 1 2( , , , )t t t tnx x x= �x and 1 2( , , , )t t t tnv v v= �v are position and speed of particle at time t.
274 Mechatronics and Applied Mechanics

Standard PSO has the following deficiencies: Random particle initialization can ensure uniform
distribution of the initial solution, but cannot guarantee the quality of the individual; when the global
extreme bestg or individual extreme
bestp is in the local extreme, the particle cannot re-search in the
searching space, and other particles will quickly move closer to the local optimal solution, leading to
early convergence phenomenon.
The basic idea of improved PSO algorithm contains the following aspects:
(1) Use chaos algorithm to initialize particle positions and velocities:
Step 1: Use ()rand function to generate a n-dimensional vector 1 11 12 1( , , , )
ns s s= �s , where
1is is a
random number uniformly distributed between 0 and 1, n is the number of variables in the objective
function. According to the chaos iterative equation, N chaos vectors 1 2, , ,
N�s s s can be obtained.
Step 2:Map the n components of ( 1,2, , )ii N= �s to the corresponding variable interval to
generate the initial positions of particles:
max min
min min
max min
( ), 1,2, ,i i
x xx s s i N
s s
−= + − =
−x � . (6)
where ix is position of particle;
maxs and
mins are upper and lower bounds of chaotic sequence;
maxx
and minx are upper and lower bounds of the particles.
Step 3: Calculate the fitness value of particles ( 1,2, , )ii N= �x , and select m particles which have
the best performance as the initial particles. Generate the initial particle velocity randomly.
The chaos initialization method is advantageous for choosing the best initial particles, which is
helpful for searching.
(2) Disturb the individual and global extreme with probability Pe and the new individual extreme
bestfp and global extreme
bestfg after disturbing are taken as the new optimization direction. Suppose
1 2( , , , )
ny y y= �y is a point to be disturbed, defined ( )F y as the degree of constraint violation
function, 2
1( ) (max{0, ( )})
m
i iiF w g y
==∑y , and disturbance of y is as follows:
Step 1: If ( ) 0F =y , the disturbed point is 1 2
( , , , )n
fy fy fy= �fy , where ( , )i i i i
fy y y N y δ= + ,
( 1,2, , )i n= � ; ( , )i
N y δ is normal distribution with mean iy and variance δ . If the value of δ is small,
it can be ensured that the disturbed point is not far from the feasible solution.
Step 2: If ( ) 0F >y , it means a constraint violation, and the disturbance operation should minimize
( )F y . The finally disturbed result can be obtained by doing one-dimensional search along the
negative gradient direction of ( )F y .
The negative gradient direction is 1 2
( , , , )n
d d d= �d , where [ ( ) ( )]i id F y v F yε ε= + − , ( 1,2, , )i n= � ,
iv is a n-dimensional unit vector (the i-th component is 1 and the remaining components are 0), 0ε >
and is sufficiently small. This ensures that the point after the disturbance is not far from the feasible
region and the quality of disturbance is improved. Disturbance probability is defined as:
1exp tan
max 2e
tP
r
π − = − ×
. (7)
where max r is the total iteration number. The disturbance probability is high at the beginning, which
is advantageous for extending the search scope. As the search progresses, the disturbance probability
decreases. The disturbance probability is close to zero in the end, which ensures that the algorithm
converges to the global optimum. So evolution equations of improved PSO become:
1 1 2rand() ( ) rand() ( )
t t best t best tw r r+ = + − + −v v fp x fg xi i i i ,
1t t t+ = +x x v . (8)
Applied Mechanics and Materials Vols. 157-158 275

Simulation Results
Suppose the bistatic radar network is compose of one transmitter and four receivers; RCS of the target
is 2 m2; the maximum distance products of bistatic radar 1 (the transmitter and receiver 1), bistatic
radar 2 (the transmitter and receiver 2), bistatic radar 3 (the transmitter and receiver 3) and bistatic
radar 4 (the transmitter and receiver 4) are 80000 km2, 65000 km
2, 90000 km
2 and 70000 km
2,
respectively; the surveillance area is an area of 1000 km × 600 km (x-coordinate 0~1000 km, y-coordinate 0~600 km); the core area is an area of 200 km× 230 km (x-coordinate 470~670 km, y-coordinate 220~450 km).
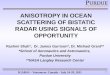
The changes of objective function obtained by the standard PSO and the improved PSO are shown
in Fig. 1. The optimal deployment of bistatic radar network and the coverage are shown in Fig. 2.
Fig. 1 Changes of objective function Fig. 2 Optimal deployment scheme
It can be seen from the simulation that the proposed algorithm provides better performances than
the standard PSO algorithm, because the proposed algorithm selects better initial particles and
disturbs the individual and global extreme. In addition, the proposed model can effectively solve the
optimal deployment problem for bistatic radar network. The weight may be adjusted to achieve
different forms of optimal deployment.
Summary
In this paper, optimal deployment model of bistatic radar network is established by the coverage rates.
The improved particle swarm algorithm is used to solve the optimal deployment issue. Simulation
results show that the proposed model and algorithm can effectively solve the optimization issue for
bistatic radar network, and the proposed algorithm provides better performance than the standard
PSO. The model can be further extended, e.g. considering the detection probability factor, location
accuracy factor, frequency factor, polarization factor, viability factor, et al. The proposed algorithm
can be applied if the index system is extended.
References
[1] Y.F. Zhang, D.L. Ma and Z. Wu: Journal of Beijing University of Aeronautics and Astronautics,
Vol. 29 (2003), p.147. (in Chinese)
[2] R.S. Chang and S.H. Wang: IEEE Transactions on Vehicular Technology, Vol. 57 (2008), p.1745.
[3] D.M. Wang, B. Xie and D.P. Agrawal: IEEE Transactions on Mobile Computing, Vol. 7 (2008),
p.1444.
[4] W.Y. Que and Y.N. Peng: Systems Engineering and Electronic, Vol. 12 (1996), p.26. (in Chinese)
[5] Y.C. Wang, C.C. Hu and Y.C. Tseng: IEEE Transactions on Mobile Computing, Vol. 7 (2008),
p.262.
[6] Y.C. Wang and Y.C. Tseng: IEEE Transactions on Parallel and Distributed Systems, Vol. 19
(2008), p.1280.
[7] M. Diao, X. Yuan and H.Y. Gao: Systems Engineering and Electronic, Vol. 31 (2009), p.2046. (in
Chinese)
276 Mechatronics and Applied Mechanics

Mechatronics and Applied Mechanics 10.4028/www.scientific.net/AMM.157-158 Optimal Deployment Model for near Space Bistatic Radar Network 10.4028/www.scientific.net/AMM.157-158.273












![PDR slides.ppt [Read-Only] - Aerospace Engineering · PDR Presentation August 16 th-17 th, 2007 Logan, ... construct and validate a GPS bistatic radar ... Bistatic Radar : Transmitter](https://img.pdfslide.us/doc/110x75/5ae5c1b67f8b9aee078bfaa0/pdr-read-only-aerospace-engineering-presentation-august-16-th-17-th-2007-logan.jpg)