Embed Size (px)
Citation preview

Optimal Control Problemswith Directional Sparsity
Gerd Wachsmuth Roland GriesseGeorg Stadler (ICES, Austin)
Numerical Mathematics
Skiseminar Optimierung
Gerlosberg, 7.–14. Marz 2009
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Outline
1 Introduction to Sparsity
2 Sparsity in Optimal Control
3 Directional Sparsity
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Introduction to Sparsity
Applications of Sparsity
Identification of relevant mechanisms (systems biology, chemicalengineering)
Image/signal reconstruction
Actuator placement
How to obtain Sparsity
Using µ(u 6= 0) =⇒ combinatorial complexity (in finite problems)
Using a L1 norm: [Donoho (2006)] ”For most Large UnderdeterminedSystems of Linear Equations the Minimal L1-Norm Solution is alsothe Sparsest Solution”
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Introduction to Sparsity
Applications of Sparsity
Identification of relevant mechanisms (systems biology, chemicalengineering)
Image/signal reconstruction
Actuator placement
How to obtain Sparsity
Using µ(u 6= 0) =⇒ combinatorial complexity (in finite problems)
Using a L1 norm: [Donoho (2006)] ”For most Large UnderdeterminedSystems of Linear Equations the Minimal L1-Norm Solution is alsothe Sparsest Solution”
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Application: Signal Reconstruction
Least-squares reconstruction of a noisy signal
minimize ‖x − xnoisy‖22 + δ ‖Dx‖2
2
Total-variation reconstruction of the same signal
minimize ‖x − xnoisy‖2 + γ ‖Dx‖1
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Application: Signal Reconstruction
Least-squares reconstruction of a noisy signal
minimize ‖x − xnoisy‖22 + δ ‖Dx‖2
2
Total-variation reconstruction of the same signal
minimize ‖x − xnoisy‖2 + γ ‖Dx‖1
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Application: Signal Reconstruction
Least-squares reconstruction of a noisy signal
minimize ‖x − xnoisy‖22 + δ ‖Dx‖2
2
Total-variation reconstruction of the same signal
minimize ‖x − xnoisy‖2 + γ ‖Dx‖1
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

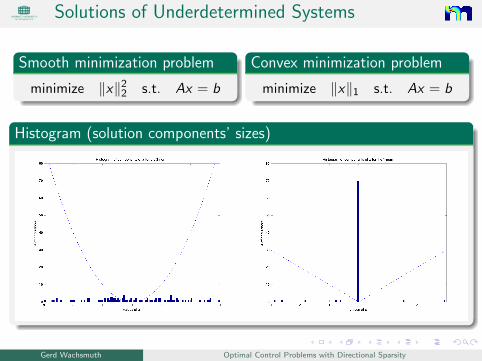
Solutions of Underdetermined Systems
Smooth minimization problem
minimize ‖x‖22 s.t. Ax = b
Convex minimization problem
minimize ‖x‖1 s.t. Ax = b
Histogram (solution components’ sizes)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity
Solutions of Underdetermined Systems
Smooth minimization problem
minimize ‖x‖22 s.t. Ax = b
Convex minimization problem
minimize ‖x‖1 s.t. Ax = b
Histogram (solution components’ sizes)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Sparsity by the L1 Norm?
Natural sparsity measure
‖x‖0 = # 1 ≤ i ≤ n : |xi | 6= 0
leads to combinatorial complexity
[Donoho(2006)]
”For most large underdetermined systems of linear equations the minimalL1-norm solution is also the sparsest solution”
Other sparsity promoting ”norms” in use
‖x‖pp for 0 < p < 1
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Sparsity in Optimal Control
standard opt. control problem
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2
s.t.
−4y = u in Ω
y = 0 on Γ
and ua ≤ u ≤ ub
‖u‖2L2 =
ZΩ
|u(x)|2 dx
, ‖u‖L1 =
ZΩ
|u(x)| dx
Features
optimal control u is 6= 0 everywhere
differentiable optimization problem
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Sparsity in Optimal Control
standard opt. control problem
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2
s.t.
−4y = u in Ω
y = 0 on Γ
and ua ≤ u ≤ ub
‖u‖2L2 =
ZΩ
|u(x)|2 dx
, ‖u‖L1 =
ZΩ
|u(x)| dx
Features
optimal control u is 6= 0 everywhere
differentiable optimization problem
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Sparsity in Optimal Control
problem with sparsity term
Minimize 12‖y − yd‖2
L2 + β ‖u‖L1
s.t.
−4y = u in Ω
y = 0 on Γ
and ua ≤ u ≤ ub
‖u‖2L2 =
ZΩ
|u(x)|2 dx , ‖u‖L1 =
ZΩ
|u(x)| dx
Features
optimal control u is sparse
non-differentiable (convex) optimization problem
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity
[Vossen, Maurer (2006), Stadler (2008)]

Optimality for Sparsity Problems
Regularized formulation
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2 + β ‖u‖L1
s.t. PDE and ua ≤ u ≤ ub
Lemma (Optimality conditions)
There exist λ ∈ ∂‖ · ‖L1(Ω)(u) and adjoint state p = S?(yd − Su) s.t.
〈u − u, −p + β λ+ α u〉 ≥ 0 for all u ∈ Uad
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Optimality for Sparsity Problems
Regularized formulation
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2 + β ‖u‖L1
s.t. PDE and ua ≤ u ≤ ub
Lemma (Optimality conditions)
There exist λ ∈ ∂‖ · ‖L1(Ω)(u) and adjoint state p = S?(yd − Su) s.t.
〈u − u, −p + β λ+ α u〉 ≥ 0 for all u ∈ Uad
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Structural Properties
Adjoint equation for example problem
−4p = y − yd in Ω
p = 0 on Γ
Problem with α2‖u‖2
L2
p
u
Problem with β ‖u‖L1
p
u
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Structural Properties
Adjoint equation for example problem
−4p = y − yd in Ω
p = 0 on Γ
Problem with α2‖u‖2
L2
p
u
Problem with β ‖u‖L1
p
u
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Numerical Solution of Problems with Sparsity
Regularized formulation
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2 + β ‖u‖L1
s.t. PDE and ua ≤ u ≤ ub
Optimality conditions
µ = p − α u
u = max0, u + c (µ− β)
+ min0, u + c (µ+ β)
−max0, u − ub + c (µ− β)
−min0, u − ua + c (µ+ β)
Newton differentiable for α > 0
Sparsity is maintained
p
u
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Numerical Solution of Problems with Sparsity
Regularized formulation
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2 + β ‖u‖L1
s.t. PDE and ua ≤ u ≤ ub
Optimality conditions
µ = p − α u
u = max0, u + c (µ− β)
+ min0, u + c (µ+ β)
−max0, u − ub + c (µ− β)
−min0, u − ua + c (µ+ β)
Newton differentiable for α > 0
Sparsity is maintained
p
u
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Numerical Solution of Problems with Sparsity
Regularized formulation
Minimize 12‖y − yd‖2
L2 + α2 ‖u‖
2L2 + β ‖u‖L1
s.t. PDE and ua ≤ u ≤ ub
Optimality conditions
µ = p − α u
u = max0, u + c (µ− β)
+ min0, u + c (µ+ β)
−max0, u − ub + c (µ− β)
−min0, u − ua + c (µ+ β)
Newton differentiable for α > 0
Sparsity is maintained
p
u
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Convergence of Regularised Solutions
Convergence rate
Suppose ua, ub ∈ L∞(Ω) and∣∣x ∈ Ω :
∣∣|p0| − β∣∣ ≤ ε∣∣ ≤ C ε. Then for
all d < 1/3,‖uα − u0‖L2(Ω) ≤ Cd α
d .
A-priori FEM error
Assume ua, ub ∈ L∞(Ω). Then,
‖uα,h − uα‖2 ≤ C (hα−1 + h2 α−3/2).
A-posteriori FEM error, α > 0
Local error estimates are obtained =⇒ adaptive algorithms can be used
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Convergence of Regularised Solutions
Convergence rate
Suppose ua, ub ∈ L∞(Ω) and∣∣x ∈ Ω :
∣∣|p0| − β∣∣ ≤ ε∣∣ ≤ C ε. Then for
all d < 1/3,‖uα − u0‖L2(Ω) ≤ Cd α
d .
A-priori FEM error
Assume ua, ub ∈ L∞(Ω). Then,
‖uα,h − uα‖2 ≤ C (hα−1 + h2 α−3/2).
A-posteriori FEM error, α > 0
Local error estimates are obtained =⇒ adaptive algorithms can be used
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity
[Wachsmuth, Wachsmuth (to appear)]

Outline
1 Introduction to Sparsity
2 Sparsity in Optimal Control
3 Directional Sparsity
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Can we do Better Than Just Sparse?
Sparsity
vs. directional sparsity
Objective function
12‖y − yd‖2
L2 + β ‖u‖L1
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Can we do Better Than Just Sparse?
Sparsity vs. directional sparsity
Objective function
12‖y − yd‖2
L2 + β ‖u‖L1
Objective function
12‖y − yd‖2
L2 + β ‖u‖L1(L2)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Can we do Better Than Just Sparse?
Sparsity vs. directional sparsity
Properties
no structural assumptionsmade
Properties
exploits known or desiredgroup sparsity structure
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Directional Sparsity: Basic Results
Problem formulation
min1
2‖Su − yd‖2
H +α
2‖u‖2
L2(Ω)
+ β ‖u‖L1(L2)
s.t. ua ≤ u ≤ ub a.e. in Ω x1
x2
Ω2(x
1)
x1Ω1
Problem data
ua, ub ∈ L2(Ω), S ∈ L(L2(Ω),H), Ω ⊂ RN = Rn × RN−n
Lemma
For α > 0 (or α = 0 and S injective) and β ≥ 0, there exists a uniquesolution u.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Directional Sparsity: Basic Results
Problem formulation
min1
2‖Su − yd‖2
H +α
2‖u‖2
L2(Ω)
+ β
∫Ω1
(∫Ω2(x1)
u(x1, x2)2 dx2
)1/2dx1
s.t. ua ≤ u ≤ ub a.e. in Ω x1
x2
Ω2(x
1)
x1Ω1
Problem data
ua, ub ∈ L2(Ω), S ∈ L(L2(Ω),H), Ω ⊂ RN = Rn × RN−n
Lemma
For α > 0 (or α = 0 and S injective) and β ≥ 0, there exists a uniquesolution u.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Directional Sparsity: Basic Results
Problem formulation
min1
2‖Su − yd‖2
H +α
2‖u‖2
L2(Ω)
+ β
∫Ω1
(∫Ω2(x1)
u(x1, x2)2 dx2
)1/2dx1
s.t. ua ≤ u ≤ ub a.e. in Ω x1
x2
Ω2(x
1)
x1Ω1
Problem data
ua, ub ∈ L2(Ω), S ∈ L(L2(Ω),H), Ω ⊂ RN = Rn × RN−n
Lemma
For α > 0 (or α = 0 and S injective) and β ≥ 0, there exists a uniquesolution u.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Directional Sparsity: Basic Results
Problem formulation
min1
2‖Su − yd‖2
H +α
2‖u‖2
L2(Ω)
+ β
∫Ω1
(∫Ω2(x1)
u(x1, x2)2 dx2
)1/2dx1
s.t. ua ≤ u ≤ ub a.e. in Ω x1
x2
Ω2(x
1)
x1Ω1
Problem data
ua, ub ∈ L2(Ω), S ∈ L(L2(Ω),H), Ω ⊂ RN = Rn × RN−n
Lemma
For α > 0 (or α = 0 and S injective) and β ≥ 0, there exists a uniquesolution u.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Optimality for Directional Sparsity Problems
Fixed point property
u is optimal ⇔ u solves
Minimize1
2‖Su − yd‖2
H +1
2
ZΩ+
„α +
β
‖u(x1, ·)‖L2
«u(x)2 dx
s.t. PDE and ua ≤ u ≤ ub
and u = 0 in Ω \ Ω+
and it satisfies the complementarity property
‖p(x1, ·)‖L2 ≤ β where u(x1, ·) = 0
First solution approach
fixed-point iteration for x1 7→ ‖u(x1, ·)‖L2
semi-smooth Newton method inside
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Optimality for Directional Sparsity Problems
Fixed point property
u is optimal ⇔ u solves
Minimize1
2‖Su − yd‖2
H +1
2
ZΩ+
„α +
β
‖u(x1, ·)‖L2
«u(x)2 dx
s.t. PDE and ua ≤ u ≤ ub
and u = 0 in Ω \ Ω+
and it satisfies the complementarity property
‖p(x1, ·)‖L2 ≤ β where u(x1, ·) = 0
First solution approach
fixed-point iteration for x1 7→ ‖u(x1, ·)‖L2
semi-smooth Newton method inside
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Numerical Results
α = 10−6
β = 10−3
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Convergence History
Fixed point iteration
0 100 200 300 400 500 600 700 800 900 100010
−5
10−4
10−3
10−2
Number of solved systems of equations
Resid
ual ||
νk −
Φ(ν
k)|
| 1
m=4
m=5
m=6
m=7
Newton?
Newton step for fixed point iteration coupled with inner optimalitysystem
Newton differentiability: partial results (to be cont’d)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Convergence History
Switching to Newton’s method
1 2 3 4 5 6 7
10−4
10−2
100
102
CPU time, seconds
Resid
uum
, ||
ν−
Φ(ν
)|| 1
Fixed point iteration
Newton method
Newton?
Newton step for fixed point iteration coupled with inner optimalitysystem
Newton differentiability: partial results (to be cont’d)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Convergence History
Switching to Newton’s method
1 2 3 4 5 6 7
10−4
10−2
100
102
CPU time, seconds
Resid
uum
, ||
ν−
Φ(ν
)|| 1
Fixed point iteration
Newton method
Newton?
Newton step for fixed point iteration coupled with inner optimalitysystem
Newton differentiability: partial results (to be cont’d)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Sparsity in Parabolic Problems
Parabolic example
minimize 12‖y − yd‖2
L2(Ω) + β ‖u‖L1(L2)
s.t.
yt − 1
10 ∆y = u in Ω = Ω1 × (0,T )
y = 0 on Γ× (0,T )
y(·, 0) = 0 in Ω1
and ua ≤ u ≤ ub a.e. in Ω
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
00.10.20.30.40.50.60.70.80.91
sparsity pattern of u
n = 2 sparse directions (space)
N − n = 1 non-sparse direction (time)
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity

Summary and Bibliography
Summary
optimal control problems with directional sparsity terms
comprises problems with elliptic and parabolic PDEs
applications in actuator placement problems
related to joint sparsity data reconstruction
D. Donoho.
For most large underdetermined systems of linear equations the minimal l1-norm solutionis also the sparsest solution.Communications in Pure and Applied Mathematics, 59:797–829, 2006.
R. Griesse, G. Stadler, and G. Wachsmuth.Optimal control problems with directional sparsity terms.in preparation.
G. Stadler.
Elliptic optimal control problems with L1-control cost and applications for the placementof control devices.Computational Optimization and Applications, 2007.doi: http://dx.doi.org/10.1007/s10589-007-9150-9.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity
Summary and Bibliography
Summary
optimal control problems with directional sparsity terms
comprises problems with elliptic and parabolic PDEs
applications in actuator placement problems
related to joint sparsity data reconstruction
D. Donoho.
For most large underdetermined systems of linear equations the minimal l1-norm solutionis also the sparsest solution.Communications in Pure and Applied Mathematics, 59:797–829, 2006.
R. Griesse, G. Stadler, and G. Wachsmuth.Optimal control problems with directional sparsity terms.in preparation.
G. Stadler.
Elliptic optimal control problems with L1-control cost and applications for the placementof control devices.Computational Optimization and Applications, 2007.doi: http://dx.doi.org/10.1007/s10589-007-9150-9.
Gerd Wachsmuth Optimal Control Problems with Directional Sparsity


























![Mass lumping for the optimal control of elliptic partial ......and Wachsmuth,2011, (4.13)] and to obtain a discrete projection formula, see [Casas et al.,2012, Lemma 3.4]. However,](https://img.pdfslide.us/doc/110x75/604515c181f2970cff25417d/mass-lumping-for-the-optimal-control-of-elliptic-partial-and-wachsmuth2011.jpg)