Embed Size (px)
Citation preview
OpenMesh – a generic and efficient pol ygon mesh data structure
M. Botsch S.Steinberg S.Bischoff L. KobbeltLehrstuhlfur InformatikVIII
ComputergraphikundMultimediaRWTH Aachen
Abstract
Wedescribetheimplementationof ahalf-edgedatastructurefor thestatic representationand dynamichandlingof arbitrary polygonalmeshes.Theparticulardesignof thedatastructuresandclassesaimsat maximumflexibility andhigh performance.We achieve this byusinggenerativeprogrammingconceptswhichallow thecompilertoresolve mostof thespecialcasehandlingdecisionsat compiletime.Weevaluateourdatastructurebasedonprototypicimplementationsof meshprocessingapplicationssuchasdecimationandsmoothing.
1 Intr oduction
Polygonalmeshesarethemostappropriategeometryrepresentationfor interactive 3D graphicsapplications.They areflexible enoughto approximatearbitraryshapesto any approximationtoleranceandthey canbe processedefficiently by the currentgraphicshardwarewhich is availableevenon today’s low costPCs.
Oneof thelong-termgoalsof theOpenSGplusinitiative is to de-signandimplementa setof softwaretools to enhancetheOpenSGAPI with high level functionality for handlingcomplex geometricobjects. In this context a properlydesignedgeometrykernelplaysanimportantrole sincemosthigh level algorithmswill bebasedonit. The natureof the plannedtarget applicationssuchas level-of-detailmanagementandsubdivisionsurfacesimpliesthatthisunifiedgeometryrepresentationshouldbebasedonpolygonalmeshes.
In this short paperwe describethe designand implementationof our polygonalmeshdatastructure. We startby identifying thespecificrequirementsfor thedatastructurein thecontext of thepar-ticular algorithmsthatareplannedwithin the OpenSGplusproject.Theserequirementsallow us to identify threemajor designgoalswhich areflexibility (with respectto theunderlyingimplementationandto thehigherlevel algorithms),efficiency(in time andmemoryusage),andease-of-use(the API hasto hide the complexity of theunderlyingdatastructures).
2 Requirements
Themaindesigngoal for our library is flexibility. Sincewe do notwant to overly restrict the setof applications,it shouldbe able toprovide randomlyaccessto vertices,edgesandfaces,wherefacescanbearbitrarypolygonsandnot just triangles.Theusershouldbeableto choosebetweenarraysor lists asunderlyingcontainertypesandarbitraryscalartypes.
The secondgoal is time and spaceefficiency. Especiallyalgo-rithms like decimationor smoothingof meshesneedto navigatethroughthe one-ring-neighborhoodof a vertex. So we mustallowfastaccessto suchinformation.Forspaceefficiency, memoryshouldbeallocatedonly for elementsactuallyused,e.g.,polygonswith noattributesdonot allocatepointersto their elements.
The third goal is ease-of-use. TheAPI shouldbeeasyto under-standandto usefor non-expertsso that it canbe integratedeasilyinto any otherlibrary like,e.g.,OpenSG.Ourgoalis auserinterfacethatwrapsandhidesthecomplex underlyingstructurewith asimpleAPI.
3 Previous Work
A polygonalmeshconsistsof a set of vertices,edges,facesandtopologicalrelationsbetweenthem.Basedon theserelations,adatastructuredefineshow eachelementis storedandwhatreferencestoits neighborhoodit needs.In the following we give a shortsurveyover suchdatastructures.
We mainly distinguishbetweenface-basedandedge-baseddatastructures.Face-baseddatastructuresstorefor eachfacepointerstoits verticesandits neighboringfaces.This makesit possibleto nav-igatearoundeachvertex by visiting all surroundingfaces,which isfrequentlydonein many algorithms.However, specialcasehandlingis needed,whennavigation runsover itemswith variablevalence.Supposea meshthat consistsof trianglesas well as quadrangles,thennavigationwouldnotwork withoutmany time consumingcasedistinctions.
Edge-baseddatastructuresstorefor eachedgepointersto bothverticesandto theneighboringedges.Sinceanedgehasalwaysthesametopologicalstructure,it is possibleto handlepolygonswithvariablevalencein onemesh.
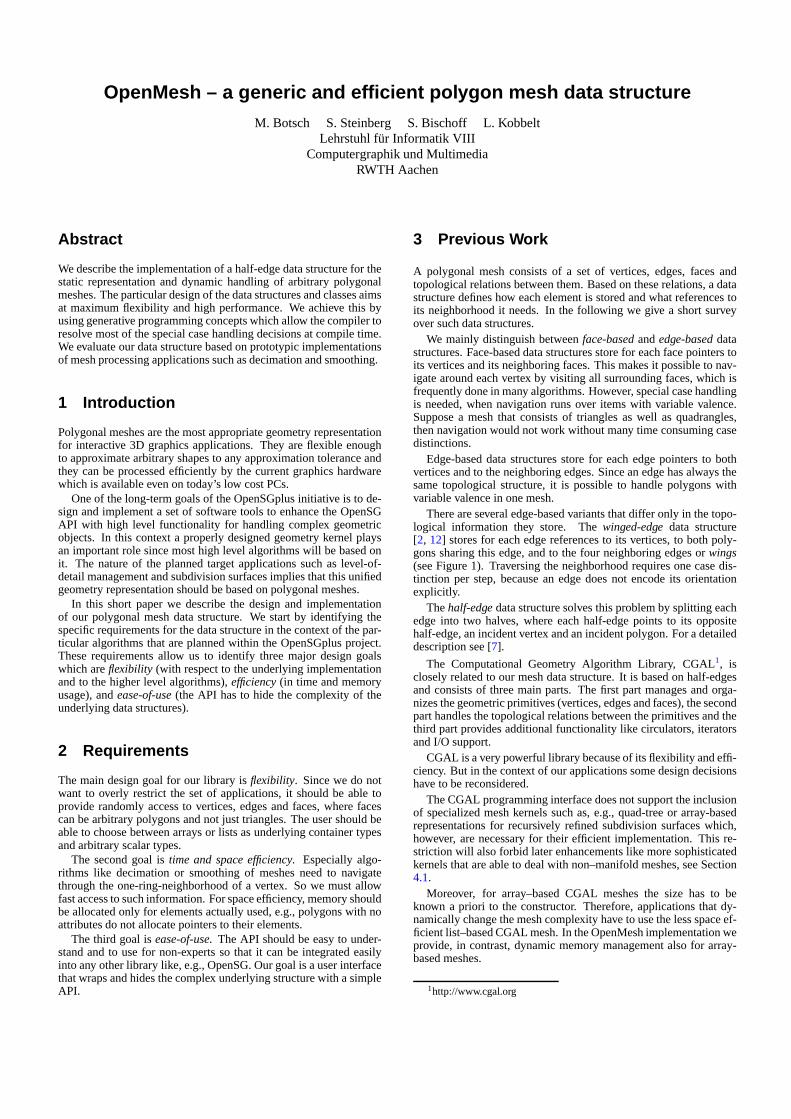
Thereareseveraledge-basedvariantsthatdiffer only in thetopo-logical information they store. The winged-edge data structure[2, 12] storesfor eachedgereferencesto its vertices,to bothpoly-gonssharingthis edge,andto the four neighboringedgesor wings(seeFigure1). Traversingtheneighborhoodrequiresonecasedis-tinction per step,becausean edgedoesnot encodeits orientationexplicitly.
Thehalf-edge datastructuresolvesthisproblemby splittingeachedgeinto two halves, whereeachhalf-edgepoints to its oppositehalf-edge,anincidentvertex andanincidentpolygon.For adetaileddescriptionsee[7].
The ComputationalGeometryAlgorithm Library, CGAL1, iscloselyrelatedto our meshdatastructure.It is basedon half-edgesandconsistsof threemain parts. The first part managesandorga-nizesthegeometricprimitives(vertices,edgesandfaces),thesecondparthandlesthetopologicalrelationsbetweentheprimitivesandthethird partprovidesadditionalfunctionality like circulators,iteratorsandI/O support.
CGAL is averypowerful library becauseof its flexibility andeffi-ciency. But in thecontext of ourapplicationssomedesigndecisionshave to bereconsidered.
TheCGAL programminginterfacedoesnotsupporttheinclusionof specializedmeshkernelssuchas,e.g.,quad-treeor array-basedrepresentationsfor recursively refinedsubdivision surfaceswhich,however, arenecessaryfor their efficient implementation.This re-strictionwill alsoforbid laterenhancementslike moresophisticatedkernelsthatareableto dealwith non–manifoldmeshes,seeSection4.1.
Moreover, for array–basedCGAL meshesthe size has to beknown a priori to the constructor. Therefore,applicationsthat dy-namicallychangethemeshcomplexity have to usethelessspaceef-ficientlist–basedCGAL mesh.In theOpenMeshimplementationweprovide, in contrast,dynamicmemorymanagementalsofor array-basedmeshes.
1http://www.cgal.org

4 OpenMesh
This sectionwill describethebasicdesigndecisionsleadingto thecurrentOpenMeshimplementation.Theprogramminginterfaceandsomeof the implementationdetailsareexplainedbasedon simpleexamples. A moredetaileddescriptioncanbe found in the docu-mentation[10].
���� 2
57
1
73
5
4 4
6
3
1
1. Vertex �� oneoutgoinghalfedge,
2. Face�� onehalfedge,
3. Halfedge�� targetvertex,
4. Halfedge�� its face,
5. Halfedge�� next halfedge,
6. Halfedge�� oppositehalfedge(implicit),
7. Halfedge�� previoushalfedge(optional).
Figure1: Halfegedatastructure.
4.1 Data Structure
Thefirst designdecisionfor a meshlibrary is to chooseoneof thedatastructuresintroducedin thelastsection.
To beasflexible aspossibleweshouldrepresenteachof themeshitems (vertices,edgesand faces)explicitly, in order to be able toattachadditionalattributesandfunctionalityto them.Sincee.g.pri-mal subdivision algorithmsneedto storenew point positionsperedge(see[13]), it is moreefficient to provide an edgeor halfedgetype in additionto verticesandfacesandto storethis new point intheedgeitself.
Although every generalpolygonalmeshcan be tesselatedto ameshconsistingof triangularfacesonly, wedonot restrictthemeshlibrary to puretrianglemeshes.Insteadwe provide ageneralpolyg-onalmeshontheonehand,andamoreefficient trianglemeshontheotherhand,so that theusercantradeoff betweenspeedandgener-ality.
Whendealingwith arbitrarypolygonalmeshes,halfedge–basedrepresentationsalsoprovide a muchsimpleralgorithmicstructure:Sincehalfedgesstorethemainconnectivity informationandalwayshavethesametopology, vertices,(half–)edgesandfacesaretypesofconstantsize.In contrast,a face–basedrepresentationhasto storeavariableamountof vertex handlesin eachface.
In many real world applicationsone has to deal with non–manifold input data. Thesemeshesmaycontaintwo typesof non–manifolddegeneracies:
� Complex vertices: The neighorhoodof theseverticesis not atopologicaldisc(nora halfdiscat theboundary).
� Complex edges are characterizedby belongingto more thantwo faces.
Our currentOpenMeshimplementationcanhandlecomplex ver-tices, but doesat the momentnot supportcomplex edges. Thisfunctionality could be addedby providing a meshkernel for non–manifoldmeshes(seethenext section).
In orderto enableefficient implementationof standardalgorithmslike e.g. smoothing,subdivision or decimation,the most frequentatomicmeshoperationsperformedby thesealgorithmshave to betakeninto accountwhendesigningthedatastructure.In additiontotheususalconnectivity information,all of thesealgorithmsrequireaccessto the one–ringneighborhoodof a vertex, possiblyin termsof verticesor incidentedgesor faces.
Consideringthesespecial requirementsimplies the use of ahalfedge–baseddatastructure,wherewe have a naturalrepresen-tationof all typesof meshitemsandarbitrarypolygonalfaces.Thehalfedgestructurealso provides fast, constant–timeaccessto theone–ringneighborhoodof vertices.Startingatanoutgoinghalfedgeof a certain vertex, the next halfedgein clockwise order can bereachedby two indirections: go to the next halfedgeof the face,thento its oppositehalfedge.Facebasedstructureshave to performanexpensive searchwithin thecurrentfacein orderto find this nexthalfedge.
Theconnectivity informationstoredin our implementationis il-lustratedin Figure1.
4.2 Interface
Dependingon the applicationone often needsto storeadditionaldatafor certainmeshitems. Thecodein Listings1 and2, e.g.,hasto storeoneadditionalpoint for eachvertex (thecenterof gravity ofits neighbors).While anadditionalarraycouldbeusedto hold thesepoints, this approachwill becomecumbersomeanderror–proneifmore and more externalelementsare to be storedandhave to besynchronizedwith the mesh. The naturalsolution is to pack thisdatadirectly into thecorrespondingmeshitems,like e.g. attachingthe additionalpoint coordinateto the vertex type. This approachwill alsoresultin morecoherencein thememoryfootprint, therebyimproving cacheefficiency aswell.
To provide this flexibility , meshescanbecustom–tailoredfor theneedsof specificalgorithmsby parameterizingthemby a so–calledtraits class. The restof this sectionwill describethe customizingpossibilities,their implementationdetailswill be discussedin sec-tion 4.3. To fully specifyamesh,severalparameterscanbegiven:
FaceType: Specifieswhetherto usea generalpolygonalmeshorthe(moreefficient) trianglemesh.
Kernel: Themeshkernelis responsiblefor storingthemeshitemsinternally. For dynamicmeshes(e.g. for meshdecimation)akernelbasedon doubly linked lists canbe used,sinceinsert-ing/deletingelementsto/from lists is more efficient than forarrays.An array–basedkernelin turn providesfastertraversalandconsumeslessmemoryandshouldthereforeby usedforapplicationsdealingwith staticmeshesonly.
Traits: In additionto theprevioustwo points,themeshis param-eterizedby a traitsclass,thatallows to enhancemeshitemsbyarbitraryfunctionality. Theseuser–definedclassesareaddedtothe correspondingmeshitemsin termsof inheritance.In ad-dition theusercanchoosefrom a setof pre–definedcommonattributeslike e.g. normalvectoror color andattachthemtocertainmeshitems,too. Thetraitsclassalsoselectsthecoordi-natetypeandthescalartypeof themesh,sothat— dependingon theapplication— 2D–,3D–or � –D vectorsandfloat,dou-ble,or evenexactarithmeticcanbeused.
All combinationsof facetypeandmeshkernelsareconvenientlyaccessiblethroughpre–definedclasses,that are further parameter-izedby theusertraits(seeListing 1).
Themeshitemsarereferredtobyhandletypes,thataredefinedbythemeshkernel:anarray–basedkernelusesindicesto addressitems,a list–basedkernelusespointers.ThereforemostAPI functionsarebasedon theseabstracthandletypes.
In order to navigate throughthe mesh,the OpenMeshprovidesiteratorsandcirculators,thatareusedin thesamewayasSTL itera-tors. Iteratorsjust enumerateall meshitemsof onetype: in Listing2 aVertexIter is usedto iteratethroughall thevertices,rangingfrommesh.vertices begin() tomesh.vertices end().
Convenient accessto the one–ringneighborhoodof verticesisprovided by vertex circulators. Given a centervertex, all one–ring information(incoming/outgoinghalfedges,incident facesandneighboringvertices)canbeaccessedusingasimilarsyntaxasfor it-erators.In Listing 2 thecenterof gravity of eachvertex is computed

#include � ACG/Mesh/TriMesh ArrayKernelT.hh�struct MyTraits : public DefaultTraits�
template � classBase� classVertexT : public Base�public :
const Vec3f& cog() const�
return cog ; void setcog(const Vec3f& cog)
�cog = cog;
pri vate:Vec3f cog ;
; ;typedef TriMesh ArrayKernelT� MyTraits� MyMesh;
Listing 1: Definingacustom–tailoredmeshthatstoresanadditionalpointpervertex.
#include � ACG/MeshIO/MeshReader.hh�#include � ACG/MeshIO/MeshWriter.hh�int main(int argc , char � argv)�
unsignedint i (0), N(atoi(argv [1]));MyMesh mesh;MyMesh::VertexIter v it ;MyMesh::VertexIter v end(mesh.verticesend ());MyMesh::ConstVertexVertexIter c i ;
// read meshfrom argv[2]MeshIO::readmesh(mesh,argv[2]);
// smoothN iterationsfor (; i � N; ++i)
�for ( v it =mesh.verticesbegin ();
v it !=v end; ++ v it )�
Vec3f c (0,0,0);float valence(0.0);
for ( c i =MyMesh::ConstVertexVertexIter(mesh, v it .handle());c i ; ++ c i )
�c += mesh.point( c it ); ++valence;
v it � � setcog(c/valence);
for ( v it =mesh.verticesbegin (); v it !=v end; ++ v it )
if (! mesh.isboundary( v i .handle()))mesh.setpoint( v i , v i � � cog());
// write result to argv[3]MeshIO::write mesh(mesh, argv [3]);
Listing 2: This exampleshows how to navigate throughthe meshusingiteratorsandcirculators. It smoothesthe meshby iterativelymoving eachvertex into thebarycenterof its neighbors.
usinga ConstVertexVertexIter, i.e. an iteratorcirculatingarounda centervertex andenumeratingall one–ringvertices.Sincethe one–ringverticeswill not be changed,we usetheConst ver-sionof thecirculator. In thesameway all verticesor (half–) edgesof a givenfacecaneasilybetraversedusingfacecirculators.
4.3 Implementation
The low–level implementationof the halfedgedatastructureof ameshis encapsulatedinto themeshkernel. It is responsiblefor thestorageof meshitems,for accessingthemthroughtheir correspond-ing handlesandfor keepingtheconnectivity informationconsistent.Thechosenmeshkernelactsastemplateparameterfor thepolygonalmesh,that inheritsfrom thekernelandaddshigher–level function-ality, like e.g.topologicaloperatorsusedin meshdecimation.
Themeshcanbefurtherparameterizedbya traitsclass,thatholds
memberclassescorrespondingto thedifferentmeshitems.Thefinalitem typeswill be derived from theseclasses,so that any desiredfunctionality canbe pluggedin by putting it into theseclasses.InListing 1 theclassVertexT is definedto storethepointcoordinatecog .
Theseadditionalattributesare addedto the systempart of thevertex usingsomegenerativeor aspectorientedprogrammingtech-niques(see[1, 5]). This avoidsproblemswith mulitple inheritance(ambiguity, no controlledoverloading)by building a linear inheri-tancechaininstead:
template � classBase�class AddNormal: public Base�public :
const Point& normal() const�
return normal ; void setnormal(const Point& n)
�normal = n;
pri vate:Point normal ;
;typedef AddNormal� SomeVertex � SomeVertexWithNormal;
Listing 3: Adding theattributenormalvectorto vertices.
Sincethehandletypesdependonthecontainersusedby themeshkernel(e.g.aVertexHandlemaybeaVertex* or anint), thekernel itself dependson the meshitems (in order to constructthehandletypes),andtheitemsrequirethehandles(avertex muststorea halfedgehandle),we have to usetemplateforward declarationsto get “safe” handletypes(see[7]). Using this technique,the itemtypesknow eachother and their respective handletypes, therebyavoiding to useandcastvoid pointers.This alsoenablesusto usethe handlestypesin the traits classes,e.g. if the facetype shouldcontaina vertex handle,seeListing 4.
HeretheclassListKernelT getsthefinal meshitemsastem-plate parameterand the classFinalMeshItemsT expects thekernel as templateargument in turn. Thereforethe classFi-nalMeshItemsT doesa forward declarationof the meshkernel,resultingin the classKernel. This classnow provides all typesof items and their correspondinghandles,and hencecan be usedastemplateargumentfor the internalvertex aswell asfor theusertraits. The fully specifiedFinalMeshItems canthenbeusedastheactualtemplateargumentof theListKernelT.
As we have seen,we usea custom–tailoredmeshfor eachappli-cation. All thesemesheswill be differentC++ types. If we wantto designalgorithmsoperatingon all of thesemeshtypes,we eitherhave to derive all meshesfrom a commonvirtual baseclass,or doit the STL way andusegenericprogrammingmethods.Sincevir-tual functions/ classesleadto a certainoverheadin spaceandtime,we have chosenthegenericapproach:every algorithmgetsthetypeMesh in form of a templateparameter.
This leadsto the problemthat certainalgorithmshave to knowaboutsomedetailsof themesh,e.g.whetherthemeshprovidesfacenormalsfor surfacelighting. Usinggenerative programmingmeth-ods(see[1, 5]), thisinformationcanbecheckedfor atcompile–time:if themeshprovidesfacenormals,they will beusedautomatically.
Another example is the optional previous halfedgehandle(cf.Fig. 1): if themeshstorestheprevious halfedgein additionto thenext–halfedgehandle,askingfor prev halfedgejustreturnsthishan-dle. Otherwise,thefacehasto betraversedby iteratively jumpingtothenext halfedgeuntil theoriginaloneis reachedagain.SeeListing5 for theimplementation:theusercallsprev halfedge,this functionin turn calls oneof its helperfunctions,dependingon the resultof(Halfedge::Attributes& HasPrevHalfedge). If we addtheprevioushalfedgeto our vertex class,it will automaticallyregister itself tothe vertex, so that (Halfedge::Attributes& HasPrevHalfedge)willbe true. This decisionis madeat compiletime, so that we addnorun–timeoverhead.
As wehaveseen,theOpenMeshis highly customizable:from theuserspoint of view by pluggingin differenttraitsclasses,andfrom

struct ListItems�// internal vertextemplate � classKernel� class VertexT�public :
// use references provided by Kerneltypedef typenameKernel::HalfedgeHandleHalfedgeHandle;...
; ;
struct ListKernel�template � classFinalMeshItems� classKernelT�public :
// use provided items& define handlestypedef typenameFinalMeshItems::Vertex Vertex ;typedef Vertex VertexHandle;
... // define HalfedgeHandle, EdgeHandle,FaceHandle ;
;
template � classMeshKernel, class SysItems, class Traits �struct FinalMeshItemsT�
// forward declaration of meshkerneltypedef FinalMeshItemsT� MeshKernel, SysItems,Traits� This;typedef typenameMEshKernel::template KernelT� This� Kernel;
// final Vertex typetypedef typenameSysItems:: template VertexT � Kernel� SysVertex;typedef typenameTraits :: template VertexT � SysVertex � Vertex ;
... // define Halfedge, Edge andFace ;
struct MyTraits : public DefaultTraits�template � classBase� struct FaceT : public Base�
typenameBase::Kernel:: VertexHandlemy vertex handle; ;
;
typedef FinalMeshItemsT� ListKernel, ListItems, MyTraits� FinalMeshItems;typedef ListKernel:: KernelT� FinalMeshItems� MyMeshKernel;typedef TriMeshT� MeshKernel� MyMesh;
Listing 4: Templateforwarddeclarationprovidestype–safehandlesfor theinternalmeshitemsaswell asfor theusertraits.
enum�
HasPrevHalfedge= (1 ��� something) ;template � bool b � classBool2Type
�enum
�my bool = b ; ;
HalfedgeHandleprev halfedgehandle(HalfedgeHandleheh)�
returnprev helper( heh,
Bool2Type� (Halfedge::Attributes& HasPrevHalfedge) � ());HalfedgeHandleprev helper(HalfedgeHandleheh, Bool2Type� true � )
�// halfedge handle is storedreturn halfedge( heh). prev halfedgehandle();
HalfedgeHandleprev helper(HalfedgeHandleheh, Bool2Type� false� )�
// cycle through the face to find the previous halfedge
Listing 5: Checkingfor certainfeaturesat compiletime
the developerspoint of view by implementingnew meshkernels.Sincemostof theseoptionscanbecheckedfor atcompile–time,wedo not loseefficiency by providing this generality.
5 Examples and Applications
In thefollowing sectionwe presentsomeexampleapplicationsthatwe have implementedusing the OpenMeshlibrary. Theseappli-cationstake strongadvantageof the OpenMeshlibrary’s genericconception,e.g. thepossibility to associatearbitraryattributeswiththemeshprimitivesat compile-time.This enablesflexible, custom-tailoredmeshtypeswithouttherun-timeoverheadknown from otherprogrammingtechniqueslike virtual inheritance.Although the in-ternalstructureof theOpenMeshlibrary is quiteinvolved,theactualusageof thelibrary is not: Well known designpatternslikeadaptors,iteratorsandtraitsfacilitatetheaccessto themesh,henceapplicationprogrammingeffort is keptata minimum.
As attributesareonly allocatedwhenactuallyneeded,nomemoryis wastedfor unusedattributes.For themereconnectivity informa-tion theOpenMeshlibrary needsto allocate4 bytes(= onepointer)per vertex, 12 bytes(= threepointers)per halfedgeand4 bytes(=onepointer)perface.Any user-specifiedattributeswill increasethememoryrequirementsaccordingly.
Becauseall attributesof a meshare statically definedat com-pile time, it is not possibleto addfurther attributesto the meshatrun-time. This functionality, however, is desireablefor someappli-cations,in particularwhenthe attribute in questionis neededonlytemporarilyin theapplication’s life-time. Hencewe assignauniqueidentifier to eachprimitive which canthenbeusedasanindex intoan array of attributesthat is kept outsideof the actualmeshdatastructure.
5.1 Mesh Smoothing
Becauseof the limitations that areinherentto a physicalsamplingprocess,meshesthatareacquiredby a3D scannerusuallyarenoisy.To remove this noise,so-calledsmoothingalgorithmshave beende-veloped(seee.g.[11]). A notedlysimpleoneis derived from min-imizing the membraneenergy of the meshand is implementedbyrepeatedlymoving verticesto the centerof gravity of their neigh-bors. Listing 2 shows how this algorithmcanbe implementedin afew linesof codeusingonly thestandardfunctionsthatareprovidedby the OpenMeshlibrary. Note that only the necessaryattributesare attachedto eachvertex (in this casethe vertex’ position) andthat no further memoryis allocatedfor unusedattributes(like thevertex’ normal). BecausetheOpenMeshlibrary supportsconstant-time (w.r.t. the total numberof vertices)iterationarounda vertex,the smoothingalgorithmis very fast. Figure2 shows the resultofapplyingthesmoothingalgorithmto a noisymesh.
Figure2: Left: Curvatureplot of a noisy meshacquiredby a 3Dscanner(400000triangles).Right: Curvatureplot of themeshafterapplying 50 iterationsof the smoothingalgorithm. The completesmoothingtookabout10secondson a standardPC.

5.2 Mesh Decimation
Meshesthat are generatedby scanningphysicalmodelstypicallyconsistof millions of triangles(see[9]). Becausemany downstreamalgorithmscannothandlethis muchdataefficiently, meshdecima-tion techniqueshave beendevelopedto reducethenumberof facesof a polygonalmesh(see[8]). This is doneby repeatedlyremov-ing verticesfrom a mesh,e.g. by collapsingedgesor by removingthe trianglesadjacentto a vertex and retriangulatingthe resultinghole.BecausetheOpenMeshlibrary alwayskeepstrackof thelocalconnectivity information,these(Euler-)operationscanefficiently beperformedandare, in fact, alreadyprovided by the library. UsingtheOpenMesh’s traitsconceptit is furthermoreeasyto consistentlyassociateandupdatean a global approximationerror, like e.g. thedistanceto theoriginalmeshor theso-callederror-quadric(see[6]),to eachvertex. Light-weight vertex handlescan thenbe storedina priority-queueto schedulethe decimationorder. Our implemen-tation basedon the OpenMeshlibrary useserror-quadricsaserrormeasureandachievesa decimationrateof 20000trianglespersec-ond(Figure3).
Figure3: Left: Bunny consistingof 70000triangles(modelcour-tesyof StanfordUniversityComputerGraphicsLaboratory).Right:Bunny aftermeshdecimationusingtheerror-quadrictechnique(700triangles). The completedecimationprocesstook lessthan4 sec-onds.
5.3 Geometr y Transmission
We have developeda schemefor robustly transmitting3D geome-try over a network (see[3]). This schemeis robust in thesensethata certainpercentageof vertex lossdueto network jamming is tol-eratedby the client-sidereconstructionalgorithm(Figure4). Theimplementationusesa numberof techniquesto speedup andfacil-itate the reconstructionprocess.For example,a spacepartitioningschemeis usedto efficiently locatetrianglesandedgesin the spa-tial vicinity of a transmittedvertex. Using the handleconceptofthe OpenMeshlibrary, the spacepartitioningcreatesonly minimalmemoryoverhead.Furthermoreattributeslike featureinformationareeasilyattachedto eachvertex or edgeusingtheOpenMeshtraitsconcept.
6 Conc lusions and Future Work
The OpenMeshlibrary is an efficient andversatileimplementationof a halfedgedatastructure.Becauseof its genericapproachit al-lows for advancedoptimizationsat compile-timeandhenceusuallyresultsin very fastexecutables.This flexibility is achieved by us-ing involved templateconceptsof the C++ programminglanguageasdefinedin theISOC++standard.Unfortunately, at thetimebeingsomeC++ compilersarenot ISOC++ compliantandfail to compiletheOpenMeshlibrary. As anext developmentstepwethereforeplanto provideworkaroundsfor thesecompilers.
Besidesthat, the OpenMeshlibrary currentlyprovides only thehalfedgedatastructurepeseanda few supportingcomponents.In
Figure4: Local reconstructionof a horsemodel.Notetheirregularmeshstructurethatrequiresa flexible halfedgedatastructure.
analogyto the STL (StandardTemplateLibrary) we plan to alsoprovide commonalgorithmsworking on thatstructure,like e.g. formeshsmoothingor meshdecimation.Thesealgorithmswill alsobegenericandhencewill provideanoptimalinteractionwith themeshstructure.
References
[1] A. Alexandrescu,ModernC++ Design: GenericProgrammingandDesignPatternsApplied, Addison–Wesley, 2001.
[2] B. G. Baumgart,A Polyhedron Representationfor ComputerVision,NationalComputerConference,Anaheim,CA, 1975,pp589-596.
[3] S. Bischoff, L. Kobbelt,TowardsRobustBroadcastingof 3D Geom-etryData, to appear.
[4] S. Campagna,L. Kobbelt,H.-P. Seidel,DirectedEdges- A ScalableRepresentationFor TriangleMeshes, ACM Journalof GraphicsTools3 (4), 1998.
[5] K. Czarnecki,U. Eisenecker, Generative Programming: Methods,Tools,andApplications, Addison–Wesley, 2000.
[6] M. Garland,P. Heckbert,SurfaceSimplificationUsingQuadricErrorMetrics, SIGGRAPH97Proceedings,1997,pp209–216.
[7] Lutz Kettner, Using Generic Programmingfor Designinga DataStructure for Polyhedral Surfaces, in Proc.14thAnnualACM Symp.onComputationalGeometry, 1998.
[8] L. Kobbelt,S.Campagna,H.-P. Seidel,Ageneral frameworkfor meshdecimation, GraphicsInterface’98 Proceedings,1998,pp43–50.
[9] M. Levoy et al., TheDigital Michelangelo Project: 3D ScanningofLargeStatues, SIGGRAPH00 Proceedings,2000,pp131–144.
[10] M. Botsch, S. Bischoff, Online documentationof the OpenMeshpackage, http://www-i8.informatik.rwth-aachen.de,researchsection.
[11] G. Taubin, A Signal ProcessingApproach to Fair SurfaceDesign,SIGGRAPH95Proceedings,1995,pp351–358.
[12] K. Weiler, Edge-BasedData Structures for Solid Modeling inCurved-SurfaceEnvironments, IEEE ComputerGraphicsandAppli-cation,1985,5(1):21-40
[13] D. Zorin etal.,Subdivisionfor ModelingandAnimation, SIGGRAPH01CourseNotes,2000.