Embed Size (px)
Citation preview

5070 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
Online Camera-Gyroscope Autocalibrationfor Cell Phones
Chao Jia, Student Member, IEEE, and Brian L. Evans, Fellow, IEEE
Abstract— The gyroscope is playing a key role in helpingestimate 3D camera rotation for various vision applications oncell phones, including video stabilization and feature tracking.Successful fusion of gyroscope and camera data requires thatthe camera, gyroscope, and their relative pose to be calibrated.In addition, the timestamps of gyroscope readings and videoframes are usually not well synchronized. Previous paper per-formed camera-gyroscope calibration and synchronization offlineafter the entire video sequence has been captured with restric-tions on the camera motion, which is unnecessarily restrictivefor everyday users to run apps that directly use the gyroscope.In this paper, we propose an online method that estimates all thenecessary parameters, whereas a user is capturing video. Ourcontributions are: 1) simultaneous online camera self-calibrationand camera-gyroscope calibration based on an implicit extendedKalman filter and 2) generalization of the multiple-view copla-narity constraint on camera rotation in a rolling shutter cameramodel for cell phones. The proposed method is able to estimatethe needed calibration and synchronization parameters onlinewith all kinds of camera motion and can be embedded in gyro-aided applications, such as video stabilization and feature track-ing. Both Monte Carlo simulation and cell phone experimentsshow that the proposed online calibration and synchronizationmethod converge fast to the ground truth values.
Index Terms— Camera calibration, visual-inertial sensorfusion, multiple view geometry, gyroscope, rolling shutter camera.
I. INTRODUCTION
CELLPHONE cameras have been increasingly popularfor video capture due to the portability and processing
power of cellphones. An increasing number of users aregetting used to record their memorable events by cellphonecameras. Beyond the video recording itself, video acquisitionalso provides opportunities for applications such as augmentedreality and visual odometry. No matter what application mobilevideo capture is used for, camera motion estimation is anessential step to improve the video quality and better analyzethe video content.
Hand-held mobile devices such as cellphones usuallysuffer from egomotion that is changing very fast, which
Manuscript received November 5, 2013; revised April 20, 2014 andAugust 19, 2014; accepted September 13, 2014. Date of publication Sep-tember 24, 2014; date of current version October 21, 2014. This work wassupported by Texas Instruments Inc., Dallas, TX, USA. The associate editorcoordinating the review of this manuscript and approving it for publicationwas Prof. Chang-Su Kim.
C. Jia is with Qualcomm Research, San Diego, CA 92121 USA (e-mail:[email protected]).
B. L. Evans is with the Department of Electrical and Computer Engineer-ing, The University of Texas at Austin, Austin, TX 78712 USA (e-mail:[email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIP.2014.2360120
makes it difficult to track the camera accurately using onlythe captured videos. For this reason, inertial sensors oncellphones such as gyroscopes and accelerometers havebeen used to help estimate camera motion because of theirincreasing accuracy, high sampling rate and robustness tolighting conditions. It has been shown that through the fusionof visual and inertial information, camera motion can beestimated more accurately and reliably [2], [3]. The fusionof camera and inertial sensors, however, requires precisecalibration: the coordinate system of inertial sensors does notcoincide that of camera, and the timestamps of inertial sensorreadings and video frames are not well synchronized. Apartfrom the relative pose and timestamp delay, camera and inertialsensors themselves also have to be calibrated so that essentialparameters such as focal length and sensor biases are known.
Many existing approaches in visual-inertial sensor fusionassume that calibration and synchronization have been doneoffline beforehand. Moreover, camera self-calibration (esti-mation of camera intrinsic parameters) are usually executedseparately from relative pose and delay calibration betweencamera and inertial sensors [4], [5]. Some calibration meth-ods can be only performed in laboratory environments withspecial devices (e.g. spin table and checkerboard) [6], [7],which further prevents everyday users from using cellphonecameras conveniently with the help of inertial sensors. In thispaper, we focus on online calibration and synchronization ofcellphone cameras and inertial sensors while users capturevideos, without any prior knowledge about the devices or anyspecial calibration hardware.
Unlike traditional cameras, most cellphone cameras donot capture the rows in a single frame simultaneously, butsequentially from top to bottom. When there is fast relativemotion between the scene and the camera, a frame canbe distorted because each row was captured under different3D-to-2D projections. This is known as rolling shuttereffect [8]–[10] and has to be considered in calibration andfusion of visual and inertial sensors.
Although some applications such as visual odometry requireestimation of both camera rotation and translation, estimatingrotation using only the gyroscope has been used successfullyin video stabilization [11] and feature tracking [12]. Whenthe displacement of pixels between consecutive video framesis primarily caused by camera rotation, a gyroscope-onlyapproach successfully stabilized video and removed rollingshutter effects [11], [13]. Similarly, gyroscope measurementswere used to pre-warp the frames so that the search spaceof the Kanade-Lucas-Tomasi (KLT) [14] feature tracker can
1057-7149 © 2014 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5071
be narrowed down to its convergence region [12]. In theseproposed methods there is no need to use the accelerometer.Therefore, only the camera and the gyroscope need to becalibrated. In this paper we focus on such camera-gyroscopecalibration, and our proposed approach does not assume thatthe camera undergoes pure rotation.
The proposed online calibration and synchronization isbased on an extended Kalman filter (EKF). Each video frameprovides a view of the 3D scene and triggers the update of theEKF through multiple view geometry. Although we care aboutcamera rotation only, we do not assume any degeneration inthe motion of the camera. By extending the recent proposedmultiple-view coplanarity constraint of camera rotation [15] torolling shutter cameras, we propose a novel implicit measure-ment that involves only camera rotation. This measurement isvalid when there is non-zero or zero camera translation. Theimplicit measurements can be effectively used in the EKF toupdate the estimate of state vectors.
This paper is organized as follows. Section II reviewsprevious algorithms on camera self-calibration, camera-inertialcalibration, and camera-gyroscope calibration. Section IIIintroduces the rolling shutter camera model and summa-rizes the parameters that we need to estimate in this paper.Section IV presents the coplanarity constraint on camera rota-tion in the rolling shutter camera model. This constraint is thenused in implicit measurements by the proposed EKF-basedonline calibration and synchronization approach in Section V.Section VI shows and analyzes the results of Monte Carlosimulation and cellphone experiments using the proposedapproach. Section VII concludes the paper.
II. RELATED WORK
Camera self-calibration has been extensively studied [16]for both global shutter camera [6] and rolling shuttercamera [17], but previous work on online self-calibrationis somewhat rare. In [18] full-parameter online cam-era self-calibration is first proposed in the framework ofsequential Bayesian structure from motion using a sum ofGaussian (SOG) filter. Their work assumes a global shuttercamera model and the motion of the camera has to containlarge enough translation to make the structure from motionproblem well-conditioned.
The inertial sensors (gyroscope and accelerometer) arewidely used in camera motion estimation and simultaneouslocalization and mapping (SLAM) together with visual mea-surements [4], [5], [19]. Especially for hand-held devices suchas cellphone cameras, inertial-aided approaches appear morerobust in camera tracking and SLAM when compared to purelyvision-based approaches [20], [21].
Relative pose between inertial sensors and camera has beensuccessfully estimated offline with special hardware [7] orsimply with a known calibration pattern [22]. Online camera-inertial calibration has also been implemented recently in theframework of SLAM or navigation [23] together with theestimation of inertial sensor biases. However, to the best ofour knowledge all of the previous work assumes that thecamera itself has been calibrated; i.e., the camera projection
parameters are known. Moreover, rolling shutter effect wasnot taken into account in the fusion of inertial and visualsensors until very recently [24]–[26]. The timestamp delaybetween camera and inertial sensors was always assumed asknown except for the recent work in [27] which estimates thetimestamp delay online.
The SLAM framework for online calibration of cameraand inertial sensors involves estimation of camera transla-tion and 3D scene structure. In addition, camera transla-tion estimation and accelerometer calibration require largeenough camera translation to initialize absolute scale andspeed estimate [28], [29]. Therefore, such methods are toocomplicated if we only care about camera rotation andjust want to use gyroscope to estimate and track cameramotion.
To calibrate the camera and gyroscope system, the methodin [11] proposed to quickly shake the camera while point-ing at a far-away object (e.g., a building). Feature pointsbetween consecutive frames are matched and all parametersare estimated simultaneously by minimizing the homographicre-projection errors under a pure rotation model. The calibra-tion in [12] is also based on homography transformation ofmatched feature points assuming pure rotation, except thatdifferent parameters are estimated separately first and thenrefined through non-linear optimization. However, as shownin [12], when the camera translation is not negligible relativeto the distance of the feature points to the camera, suchpure rotation model becomes less accurate and the calibrationresults will deviate from the ground truth. Our calibrationmethod differs with [11] and [12] not only in that it is onlineestimation, but also in that it does not assume zero translationat all. Therefore, the proposed calibration can be performedimplicitly anytime and anywhere while the camera is recordingvideo. This is especially convenient for amateur photogra-phers who want to take stabilized videos with smartphonecameras.
III. ROLLING SHUTTER CAMERA MODEL
AND GYROSCOPE
Points in the camera reference space are projected accordingto the pinhole camera model. Assuming the 3D point coordi-nates in the camera reference space are [Xc, Yc, Zc]T, theirprojection onto the image plane can be represented as
[ux
uy
]=
[cx + f Xc
Zc
cy + f YcZc
], (1)
where f is the focal length and cx , cy are the principal pointcoordinates. Here we assume that the camera projection skewis zero and the pixel aspect ratio is 1 as in [18], whichis a reasonable assumption for today’s cellphone cameras.Similarly, given the pixel coordinate [ux , uy]T, we caninvert (1) to obtain the 3D coordinates of the correspondingfeature point in the camera reference space up to an unknownscale as ⎡
⎣Xc
Yc
Zc
⎤⎦ = λ
⎡⎣ux − cx
uy − cy
f
⎤⎦. (2)

5072 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
Fig. 1. Rows are captured sequentially in rolling shutter cameras. Each blockrepresents the exposure time of a certain row.
Based on (2), we further model the radial lens distortion ofcamera using two distortion coefficients as⎡
⎣Xc
Yc
Zc
⎤⎦ = λ
⎡⎣(1 + κ1r2 + κ2r4)(ux − cx )
(1 + κ1r2 + κ2r4)(uy − cy)f
⎤⎦ , (3)
where
r =√(
ux − cx
f
)2
+(
uy − cy
f
)2
. (4)
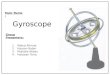
In rolling shutter cameras, rows in each frame are exposedsequentially from top to bottom [8], [30], as shown in Fig. 1.In Fig. 1 each block represents the exposure of a certain row.The exposure duration of each row (represented by the lengthof each block) depends on the lighting conditions. In thispaper we ignore possible image blur and assume instantaneousexposure. Thus, the exposure moment of each row can beapproximated as the left end of each block in Fig. 1. For animage pixel u = [ux , uy]T in frame i , the exposure time canbe represented as t (u, i) = ti + tr
uyh , where ti is the timestamp
for frame i and h is the total number of rows in each frame.Here tr is the readout time for each frame, which is usuallyabout 60% − 90% of the time interval between frames.
There exists a constant delay td between the recordedtimestamps of gyroscope and videos. Thus using thetimestamps of gyroscopes as reference, the exposure time ofpixel u in frame i should be modified as
t (u, i) = ti + td + truy
h. (5)
To use the gyroscope readings we also need to know qc,the relative orientation of the camera in the gyroscope frameof reference (represented in unit quaternion). Finally, the biasof the gyroscope bg needs to be considered. Therefore, in theonline calibration we need to estimate the parameters f , cx ,cy , κ1, κ2, tr , td , bg and qc.
IV. COPLANARITY CONSTRAINT FOR CAMERA ROTATION
Our calibration and synchronization rely on the constraintsapplied to camera rotations.
A. Coplanarity Constraint in Global Shutter Cameras
First let us consider a global shutter camera in which all ofthe pixels in the same frame are captured at the same time.Assume the normalized 3D coordinate vectors of a certainfeature in two viewpoints (frames) are fi and f ′
i (note thatby (3) we cannot recover the absolute scale but only the
Fig. 2. The epipolar constraint on a pair of features in two viewpoints.
direction of the 3D feature vector). The well-known epipolarconstraint [16] is
(fi × Rf ′i ) · t = 0, (6)
where R and t are the relative rotation and translation betweenthe two viewpoints. The epipolar constraint means that thevectors fi , Rf ′
i and t are coplanar, as shown in Fig. 2. Nowassume that three or more features are observed in these twoviewpoints. By the epipolar constraint all vectors fi × Rf ′
iare perpendicular to the relative translation vector t, andthus are coplanar (t is the normal vector of such plane).Such coplanarity can be expressed by the determinant of the3 × 3 matrix composed by any three fi × Rf ′
i vectors beingzero
det[(f1 × Rf ′1)|(f2 × Rf ′
2)|(f3 × Rf ′3)] = 0. (7)
This coplanarity was introduced in [15] and does not dependon the camera translation at all. Another desirable propertyof (7) is that it is still valid in the extreme case of zerotranslation since all vectors fi × Rf ′
i will become zero.
B. Coplanarity Constraint in Rolling Shutter Cameras
In rolling shutter cameras, however, the viewpoint is notunique for the features captured in the same frame. Here wepropose a generalized coplanarity constraint for rolling shuttercameras.
First note that both the traditional epipolar constraint (6)and the coplanarity constraint (7) are expressed in terms ofone of the two viewpoints. In fact, this frame of referencecan be chosen arbitrarily. Once the reference is fixed, we canrepresent the camera orientation corresponding to any feature(determined by its exposure moment for rolling shutter cam-eras) in this reference. For the matched features between anytwo consecutive frames in rolling shutter cameras, we proposethe following constraint
det[(R1f1 × R′1f ′
1)|(R2f2 × R′2f ′
2)|(R3f3 × R′3f ′
3)] = 0. (8)
Note that in (8) R′1 means the camera orientation correspond-
ing to feature 1 in the second frame, and not the transposeof R1. Constraint (8) does not exactly hold in general cases butonly under the assumption that the relative camera translationsbetween the exposure moments for all pair of matched featuresare in the same direction. The readout time of two consecutiveframes is at most 66ms (for 30 fps videos) and in such shortperiod of time the camera translation can be well approximatedby a constant direction. Note that such approximation is moregeneral than the approximation used in [25] which assumes thelinear velocity (both direction and magnitude) of the camera

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5073
Fig. 3. Coplanarity constraint in rolling shutter cameras. The cross productsof all pairs of matched features are perpendicular to the camera translationvector.
is constant. The constraint is illustrated by Fig. 3. In Fig. 3,the first three (from left to right) frames of axes correspondto the three features detected in the current frame. The lastthree frames of axes correspond to the three matched featuresin the next frame. The different orientations of the frames ofaxes show the changes in camera rotation while the features areexposed. The camera translation is approximated as the dashedray. The three pairs of matched features are represented bygreen, blue, and orange arrows, respectively. By the proposedcoplanarity constraint in rolling shutter cameras, the crossproducts of all pairs of matched features are perpendicularto the camera translation vector.
To make the constraint (8) more accurate we further applysuch constraint only to groups of features that are not veryfar from each other in their y-axis coordinates. Based on (5)the exposure moments of features are close to each otherif their y-axis coordinates are close. Assuming features f1,f ′1, f2, f ′
2, f3, f ′3 are selected in this way. Then the exposure
moment difference among features in the same frame is muchsmaller compared to the exposure moment difference betweenfeatures in adjacent frames (≈ 33ms). In this way, the cameratranslation vectors for the three pairs of features naturally havealmost the same direction. Constraint (8) is less dependenton the constant-direction assumption in camera translationbetween two consecutive frames.
We use the coplanarity constraint (8) as implicit measure-ment to estimate all the parameters in an EKF. The way torepresent the camera orientation corresponding to each featureusing the parameters and gyroscope readings is shown in thenext section.
V. EKF-BASED ONLINE CALIBRATION AND
SYNCHRONIZATION
The online calibration and synchronization is based on anextended Kalman filter. Our EKF evolves when every videoframe is captured, as in [24]. The state vector is defined as
x = [ f cx cy κ1 κ2 tr td bTg qT
c ]T. (9)
The gyroscope in cellphones usually has a higher sampling ratethan the video frame rate. Moreover, timestamps of gyroscopereadings and the video frames are not aligned. We show howto compute the relative rotation corresponding to each detectedfeature using gyroscope readings as following.
A. Computation of Relative Rotation
Fig. 4 illustrates the timing relationship between the gyro-scope readings and the video frames. Assume a pair of
Fig. 4. Timing relationship between the gyroscope readings and the videoframes.
matched features fi and f ′i are detected as at moments denoted
by green diamonds and the reference time is fixed as thetimestamp of the next frame (shown as the purple diamond).The relative camera orientation between the reference timeand the exposure moment of a certain feature can then beexpressed by the angular velocities
Ri =M∏
n=1
�(ωn�t in), (10)
where M is the total number of angular velocities involvedin computing the relative orientation (M = 7 for the exampleshown in Fig. 4) and �t i
n is the time duration that the angularvelocity ωn is used in the integration (assuming constantangular velocity between readings). Note that not all of theM angular velocities have non-zero �t i
n values. For example,assume the timestamp of each angular velocity ωn is τn . Thenfor the feature in the next frame (right green diamond) inFig. 4, only �t i
4, �t i5 and �t i
6 are non-zero and they can becomputed as⎧⎪⎨
⎪⎩�t i
4 = τ5 − (Tnext + td)
�t i5 = τ6 − τ5
�t i6 = (Tnext + td + tr
uyih ) − τ6
, (11)
where Tnext is the framestamp of the next frame ((Tnext + td )corresponds to the moment for the purple diamond) anduyi is the y-axis coordinate of the feature ((Tnext + td + tr
uyih )
corresponds to the moment for the green diamond).Each sub-relative rotation matrix can be computed by expo-
nentiating the skew symmetric matrix formed by the productof angular velocity and its duration:
�(ωn�t in) = exp(skew(ωn)�t i
n), (12)
where
skew(ωn) =⎡⎣ 0 −ωzn ωyn
ωzn 0 −ωxn
−ωyn ωxn 0
⎤⎦. (13)
�t in is determined by the exposure moments of fi and f ′
icomputed using (5), and thus depends on the estimationvariables tr and td . The true angular velocities are representedas
ωn = ω̂n + bg + ngn , (14)
where ω̂n is the gyroscope reading, bg is the gyroscopebias (to be estimated), and ngn ∼ N (0; σg) is the Gaussiandistributed gyroscope measurement noise.

5074 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
In this way, the relative camera orientation correspondingto any feature detected in the current and next frame can beexpressed by the angular velocities.
B. State Dynamics
All the parameters appeared in Section III except bg areconstant so they are just copied in state dynamics⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
f (k + 1) = f (k)
cx(k + 1) = cx(k)
cy(k + 1) = cy(k)
κ1(k + 1) = κ1(k)
κ2(k + 1) = κ2(k)
tr (k + 1) = tr (k)
td(k + 1) = td(k)
qc(k + 1) = qc(k).
(15)
We model the dynamics of bg by a random-walk process
bg(k + 1) = bg(k) + mg(k), (16)
where the random walk step mg(k) is Gaussian distributedwith zero mean and variance σb.
C. State Measurements
After features are matched between the current frame andthe next frame, we picked N groups of features with threefeatures in each group (without overlap). As mentioned inSection IV-B, to make the coplanarity constraint more accu-rate, the selection of groups of features are not completelyrandom. The three features in the same group should haveclose y-axis coordinates but relatively far away x-axis coordi-nates.
In this way we can obtain N measurements from thecoplanarity constraint shown in Section IV. For instance, themeasurement formed by features 1, 2 and 3 is
0 = det[(R1f1 × R′1f ′
1)|(R2f2 × R′2f ′
2)|(R3f3 × R′3f ′
3)]. (17)
The 3D feature locations fi are computed by inverting thecamera projection (3) as
fi = qc(k) ⊗ 1
ϕi
⎡⎣(1 + κ1r2 + κ2r4)(uxi + vxi − cx (k))
(1 + κ1r2 + κ2r4)(uyi + vyi − cy(k))f (k)
⎤⎦ ,
(18)
where qc(k) ⊗ (·) means rotating a vector using 3D rotationdefined by qc(k), and ϕi is a normalization factor to makethe result have unit norm. Besides normalization, there aretwo differences between (3) and (18): (a) we take the featuredetection error vxi , vyi ∼ N (0; σ f ) into account, and (b) the3D feature is represented in the gyroscope coordinate systemby multiplying the relative rotation estimate qc(k) at stage k.
The relative rotation matrix Ri is computed accordingto (10). In this way, the right hand side of (17) can beexpressed as a function of the state variables.
All of the N coplanarity constraints generates N implicitmeasurements at a stage k according to (17)⎧⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎩
0 = z1(k) = h1(x(k), {ω̂n}, {ui }, {ngn}, {vi }),0 = z2(k) = h2(x(k), {ω̂n}, {ui }, {ngn}, {vi }),
...
0 = zN (k) = hN (x(k), {ω̂n}, {ui }, {ngn}, {vi}),
(19)
where {ω̂n} are the gyroscope readings during the exposuretime of two consecutive frames, {ui } are the 2D coordinatesof all of the observed features. {ngn} and {vi} are the gyroscopemeasurement noise and feature observation noise, respectively,as shown in (14) and (18). Please note in the measure-ment equations the measurement noise appears implicitly asnon-additive noise.
While the typical formulation of the EKF involves theassumption of additive measurement noise, this assumption isnot necessary for EKF implementation. For the general formof observation
zk = h(xk, vk) (20)
with Gaussian noise vk ∼ N (0, Rk), the innovation covarianceis computed as
Sk = HkPk|k−1HTk + VkRkVT
k , (21)
where Hk = ∂h∂x
∣∣x̂k|k−1
, Vk = ∂h∂v
∣∣x̂k|k−1
. The rest steps are thesame as EKF with additive measurement noise. For detailsplease see [31].
In our case, the measurement noise vk consists of thegyroscope measurement noise and the feature observationnoise. Its covariance Rk is a constant matrix.
The state update is performed right after state prediction.Only one round of state prediction and update is needed oncea new frame is read and all features are tracked.
D. Extended Kalman Filter Computation
In EKF state vector estimate is predicted using dynamicequations and then updated using measurement equations.Prediction and Update rely on the Jacobian matrices ofthe dynamic and measurement equations with respect tothe state vector and the system noise. The linear dynamicequations (15) and (16) lead to very simple Jacobian matrices(identity matrix). The Jacobian matrices of the measurementequations can also be computed analytically in closed-form.We show the derivations in Appendix A.
The camera-to-gyroscope orientation is represented by unitquaternion qc. Traditional extended Kalman filter cannotguarantee unit norm of the quaternion after estimate update.Therefore we use a minimal 3-element representation δθ forthe estimate error of qc as in [32]. The true value of qc canbe represented as
qc = δq ⊗ q̂c, (22)
where q̂c is the estimate and
δq =[
δθ/2√1 − ‖δθ/2‖2
2
]. (23)

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5075
With such error representation we can update the estimate in amultiplicative way and guarantee the unit norm of the estimate.For more details please see [32].
In practice EKF update is executed every other frame(or less often to reduce complexity). The reason is that themeasurement equation (17) involve features detected fromtwo consecutive frames. If EKF is updated every frame thenthe features in each frame are used twice, which causes corre-lation between feature detection errors and the state estimate.One can augment the state vector to track the feature detec-tion errors. However, such augmentation will further increasethe computational burden, while updating state estimateevery other frame can easily avoid such correlation withoutaugmenting the state vector.
E. State Initialization
The state vector needs to be initialized carefully to makethe EKF work properly. We initialize the principal pointcoordinates cx , cy to be the center of the frame. The focallength is initialized using the horizontal view angle providedby the smart phone operating system. If the operation systemof the smartphone does not provide the value of horizontalview angle, SOG filters can be used with several initial guessesas in [18]. The readout time tr is initialized as 0.0275 mswhich is about 82.5% of the entire interval between frames.The coordinate system of the gyroscope is defined relative tothe screen of the phone in its default orientation in all Androidphones. Thus we can obtain the initial guess of qc dependingon whether we are using the front or rear camera. Thisinitial guess is usually accurate enough, but our calibration isnecessary since the camera is sometimes not perfectly alignedwith the screen of the phone. The initial values of all otherparameters (td and bg) are just set as 0.
To make sure that the true value lies in the 3σ intervalsof the initial Gaussian distributions, we initialize the stan-dard deviation of cx , cy, f, tr as 6.67 pixels, 6.67 pixels,20 pixels, and 0.00167 s, respectively. td is initializedas a sum of Gaussian distribution because of the highlynon-linearity of the measurements with respect to td . Theset of Gaussian distributions are initialized uniformly in therange of ±30ms. The standard deviation of each elementin bg is initialized as 0.006. The standard deviation of theestimate error of qc is initialized as 0.5 degrees along eachaxis. The standard deviation of the radial distortion parametersκ1 and κ2 is initialized as 0.1. We set the standard deviationof gyroscope measurement noise and feature detection error as0.003 rads/s and 1 pixels, respectively. The standard deviationof gyroscope measurement noise is determined from comput-ing the reading variance while the cellphone is put still. Due tothe sum-of-Gaussian initialization of td , we start from a SOGfilter but it quickly converge to a single EKF using pruning ofdistributions with low weights [18].
VI. EXPERIMENTAL RESULTS
In this section we test the proposed algorithm with bothMonte Carlo simulation and cellphone experiments.
TABLE I
RMS ERROR OF 50 MONTE CARLO SIMULATION TRIALS
A. Monte Carlo Simulation
In the Monte Carlo simulation we randomly locate 1000 3Dfeature points distributed in range X ∈ [−30, 30] meters,Y ∈ [−20, 20] meters, Z ∈ [30, 60] meters, respectively. Theground truth value of the parameters are set as f = 690 pixels,cx = 355 pixels, cy = 220 pixels, κ1 = 0.111, κ2 = −0.303,tr = 0.02 s, td = 0.02 s, qc = [ 1√
2,− 1√
2, 0, 0]T respectively.
bg is initialized as [−0.008, 0.002, 0.017]T rads/s and thensimulated by random walk. All of these values come fromthe parameters of a real cellphone camera. The ground truthmotion of camera is fixed with a randomly generated sequenceof angular velocities and linear velocities. The angular velocityand linear velocity sampling rate is set as 100 Hz. With theground truth motion and camera/gyroscope parameters, weartificially generate a video with 250 frames at frame rate30fps. Note that each video frame is not a real image but asparse 2D point cloud.
In each trial of Monte Carlo simulation we generateGaussian random gyroscope measurement noise and fea-ture detection errors according to the variances shown inSection V-E. In this way, we can artificially add the noiseand simulate the gyroscope readings and feature detections.Then we run EKF calibration in each trial, with state estimateinitialized randomly within 3σ range around the ground truthvalues (note that this initialization method is different fromthat in Section V-E, which is used for cellphone experiments).In state update we use only 150 virtual features (50 measure-ments) picked from the feature pool.
We run 50 Monte Carlo trials to compare the proposedonline estimation with the online estimation proposed in ourearlier work [1]. The proposed estimation differs from [1]primarily in lens distortion modeling, Jacobian matricescomputation ([1] computed them numerically) and selectionof features ([1] selected the features completely randomlywithout considering the y-axis coordinate distance). We alsocompare the online calibration with a batch optimizationusing all of the frames. The batch optimization is solved viaLevenberg-Marquardt algorithm [33].
Table I shows the root mean square (RMS) error of the para-meter estimation before calibration and after calibration (with250 frames). The estimation error of the gyroscope bias bg
is not shown since it is time-varying. The estimation errorof qc is converted to a single angle (computed as the L2 norm

5076 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
Fig. 5. Estimation error over time in one Monte Carlo simulation trial.
of the minimal 3-element error representation). We findthat batch optimization performs the best. The proposedEKF-based calibration method is also able to successfullyconverge to the ground truth value. With the modifications pro-posed in this paper, we can achieve a better calibration com-pared with [1]. Please note that although batch optimizationgives the closest estimate, the EKF-based online calibrationcan be implemented in real time and enable immediate useof gyroscope in vision applications. More importantly, onlinecalibration is able to deal with time-varying parameters, suchas varying f due to zoom and varying td due to clock drift.
In Fig. 5 we show the estimation error along EKF-based cal-ibration in one trial, with blue lines representing the estimationerror and red lines representing the 99.7% (3σ) uncertaintybounds. For the relative orientation qc we only show theestimation error after converting to a single angle as in table I.From Fig. 5 we can observe that the proposed method is ableto accurately estimate the parameters.
B. Cellphone Experiments
In our cellphone experiments, we use a Google Nexus SAndroid smartphone that is equipped with a three-axis gyro-scope. We capture the videos and the gyroscope readings fromthe cellphone and run the proposed online calibration andsynchronization in MATLAB. The feature points are trackedusing KLT tracker. We divide the frame into 4 equally sizedbins and perform outlier rejection locally within each bin bycomputing a homography transformation using RANSAC [34],
Fig. 6. Examples of frames extracted from the test sequences.
TABLE II
ABSOLUTE ESTIMATION ERROR FOR THE RUNNING SEQUENCE
as in [35]. We estimate the ground truth of camera projectionparameters (with lens distortion) using the offline cameracalibration method in [6]. The ground truth of timestamp delaytd is obtained by offline calibration in [12]. The ground truthof rolling shutter readout time tr is obtained by batch opti-mization under pure rotational camera motion as in [11]. Theestimated values are not guaranteed to be equal to the groundtruth values so we only use them as a reference to roughlyexamine the accuracy of the proposed algorithm. We testthe performance of the proposed method on various videosequences and show the results on two typical sequences: oneshot while running forward and the other shot while panningthe camera in front of a building. Fig. 6 shows two framesextracted from the two test sequences.1
The running sequence (with 250 frames) is used to testthe performance of the algorithm under arbitrary cameramotion, including very high frequency shake and non-zerotranslation. The absolute estimation errors before and afteronline calibration and synchronization are shown in Table II.We can observe that the proposed method is able to estimatethe parameters that are close to offline separate calibration.
In the second test video sequence (with 241 frames) wesimply pan the camera in front of a building. This video is usedto test the algorithm under (almost) zero camera translation(pure rotation). The estimation errors are shown in Table. III.The proposed algorithm works equally well compared to therunning sequence.
To better display the difference before and after synchro-nization of the timestamps between video frames and gyro-scope readings, we show the rates of 2D translation of pixelscompared to the gyroscope data as in [11]. If we ignore therolling shutter effect and the camera rotation around z-axis,
1The videos can be found at http://users.ece.utexas.edu/∼bevans/papers/2015/autocalibration/.

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5077
Fig. 7. Horizontal pixel translation rate u̇x (t) (red) and f · ωy(t + td ) (blue) for the running sequence.
Fig. 8. Vertical pixel translation rate u̇ y(t) (red) and − f · ωx (t + td ) (blue) for the running sequence.
the average rate of pixel translation can be approximated as{u̇x(t) ≈ f · ωy(t + td )
u̇ y(t) − ≈ f · ωx(t + td),(24)
where ωx (t) and ωy(t) are angular velocities around x-axis andy-axis. These two angular velocity sequences can be obtaineddiscretely from the gyroscope readings (after adding thegyroscope bias and transformed by qc). The pixel translationrate on the left hand side of (24) is approximated by finitedifferences between consecutive frames. In Fig. 7 and Fig. 8we show the pixel translation rates and the angular velocities
(right hand side of (24)) for the running sequence. We only plota 3-second duration sequence in order to make the differencelook more obvious. We can observe that after calibration andsynchronization, the curve from video data and gyro data alignmuch better, which indicates the effectiveness of the proposedalgorithm.
In Fig. 9 and Fig. 10 we show the same compari-son for the panning sequence. Again, the pixel transla-tions computed from the video and gyroscope readingsalign very well after the proposed online calibration andsynchronization.

5078 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
Fig. 9. Horizontal pixel translation rate u̇x (t) (red) and f · ωy(t + td ) (blue) for the panning sequence.
Fig. 10. Vertical pixel translation rate u̇ y(t) (red) and − f · ωx (t + td ) (blue) for the panning sequence.
C. Rolling Shutter Artifact Rectification After Calibration
We apply the proposed online calibration and synchroniza-tion algorithm in rectifying the rolling shutter artifact in videosequences. After calibration and synchronization the camerarotation can be directly obtained from gyroscope readings. Therolling shutter artifact is rectified by warping each row in theframe so that all of the rows are captured at the same moment(we fix this moment as the starting time of each frame). Fig. 11and Fig. 12 show that the gyroscope readings can effectivelycorrect the rolling shutter artifact after sensor calibration.
D. Run Time
The current running speed of the proposed algorithm imple-mented in MATLAB (where feature detection and trackingare implemented using mex functions of an OpenCV imple-mentation [36]) is 20.95 fps on a laptop with 2.3GHzIntel i5 processor. In our simulation, we had run the algorithmon every other pair of adjacent frames. However, we can runthe calibration less often than using every other pair of adjacentframes, which allows a scaling back of the calculations to meetreal-time constraints.

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5079
Fig. 11. Rolling shutter artifact rectification for the running sequence using the gyroscope readings after sensor calibration and synchronization.Top: five consecutive frames with rolling shutter artifact. Bottom: the rectified frames.
Fig. 12. Rolling shutter artifact rectification for the panning sequence using the gyroscope readings after sensor calibration and synchronization. Top: fiveconsecutive frames with rolling shutter artifact. Bottom: the rectified frames.
TABLE III
ABSOLUTE ESTIMATION ERROR FOR THE PANNING SEQUENCE
VII. CONCLUSIONS
In this paper we propose an online calibration andsynchronization algorithm for cellphones that is ableto estimate not only the camera projection parameters, butalso the gyroscope bias, the relative orientation between thecamera and gyroscope, and the delay between the timestampsof the two sensors. The proposed algorithm is based onthe generalization of the coplanarity constraint of the crossproducts of matched features in a rolling shutter camera model.The proposed algorithm can also be naturally extended toa global shutter camera model by forcing the readout timefor each frame tr to be zero. Monte Carlo simulation andexperiments run on real data collected from cellphones showthat the proposed algorithm can successfully estimate all ofthe needed parameters with different kinds of motion of thecellphones. This online calibration and synchronization ofrolling shutter camera and gyroscope make it more convenientfor high quality video recording, gyro-aided feature tracking,and visual-inertial navigation.
APPENDIX A
DERIVATION OF JACOBIAN MATRICES
In this appendix we derive how Jacobian matrices ofthe measurement equation can be computed analytically.As shown in (19), the measurement equation h() can bedecomposed into several independent components {h j ()} foreach single coplanarity constraint. Therefore, we only needto show
∂h j∂x and
∂h j∂v , where v contains both gyroscope
measurement noise and feature detection noise.Each single measurement equation h j () can be represented
in form of (17). Let ai denote Ri fi and let bi denote R′i f
′i .
Then we have
h j (x, v) = det[(a1 × b1)|(a2 × b2)|(a3 × b3)]. (25)
∂h j∂x can be computed as
∑3i=1
∂h j∂ai
∂ai∂x + ∂h j
∂bi
∂bi∂x .
∂h j∂v can be
computed in the same way. Without loss of generality, we onlyshow how to compute
∂h j∂b1
, ∂b1∂x and ∂b1
∂v .Based on the definition of matrix determinant we have
∂h j
∂b1= [(a2 × b2) × (a3 × b3)]Tskew(a1), (26)
where skew() is defined as in (13).To simplify the representation, we define
d1 =⎡⎣(1 + κ1r2 + κ2r4)(u′
x1+ v ′
x1− cx )
(1 + κ1r2 + κ2r4)(u′y1
+ v ′y1
− cy)
f
⎤⎦ (27)
and e1 = 1||d1||2 d1. Note that here
r =√(
u′x1
+ v ′x1
− cx
f
)2
+(
u′y1
+ v ′y1
− cy
f
)2
. (28)

5080 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 12, DECEMBER 2014
In this way, we have
b1 = R′1(qc ⊗ e1) (29)
according to (17) and (18). The rotation matrix R′1 is not
affected by the camera intrinsic parameters. So we have
∂b1
∂cx= R′
1[qc ⊗ (∂e1
∂d1
∂b1
∂cx)], (30)
where
∂b1
∂cx=
⎡⎢⎢⎣
−(2κ1+4κ2r2)(cx −u′
x1−v ′
x1)2
f 2 − (1+κ1r2+κ2r4)
(2κ1+4κ2r2)(cx−u′
x1−v ′
x1)(u′
y1−v ′
y1−cy )
f 2
0
⎤⎥⎥⎦ .
(31)
Similarly we can obtain ∂b1∂cy
, ∂b1∂ f , ∂b1
∂κ1and ∂b1
∂κ2.
As mentioned in Section V-D, we use a minimal 3-elementerror representation δθ for qc and have
∂b1
∂δθ= −R′
1skew(qc ⊗ e1). (32)
For more details about the minimal 3-element error represen-tation please see [32].
Recall that the rotation matrix R′1 can be computed as
in (10)
R′1 =
M∏n=1
�(ωn�tn). (33)
Different from (10), (33) only contains angular velocities withnon-zero �tn . Similar to (11) which shows how to compute�tn for the example shown in Fig. 4, we have⎧⎪⎨
⎪⎩�t1 = τ2 − (T + td )
�tn = τn+1 − τn, n = 2, . . . , M − 1
�tM = (T + td + tru′
y1h ) − τM
(34)
where T is the framestamp for the frame in which the feature[u′
x1, u′
y1]T appears. Please note that td and tr only affect the
value of �t1 and �tM .By defining �n = ∏n−1
m=1 �(ωm�tm) and γn =[∏M
m=n+1 �(ωm�tm)](qc ⊗ e1), we have
b1 = �n�(ωn�tn)γn, ∀n = 1, . . . , M. (35)
It is not difficult to show that∂b1
∂�tn= −�nskew(γn)ωn . (36)
Therefore, we can compute ∂b1∂td
and ∂b1∂tr
as⎧⎪⎪⎨⎪⎪⎩
∂b1
∂ td= −�M skew(γM )ωM + �1skew(γ1)ω1
∂b1
∂ tr= −u′
y1
h�M skew(γM )ωM .
(37)
Given (14) we can compute ∂b1∂bg
as
∂b1
∂bg=
M∑n=1
∂b1
∂ωn, (38)
where
∂b1
∂ωn= −�tn�nskew(γn). (39)
So far we have derived the derivative ∂b1∂x analytically as
in (30), (31), (32), (37) and (38). Next we compute thederivative of b1 with respect to the measurement noise.
The gyroscope measurement noise {ngn} appears in (33)through (14). As a result we have
∂b1
∂ngn= ∂b1
∂ωn= −�tn�nskew(γn). (40)
The feature detection noise {vi} appears in (27). Also notethat b1 is only affected by v ′
x1and v ′
y1. As a result we have
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
∂b1
∂v ′x1
= R′1[qc ⊗ (
∂e1
∂d1
⎡⎢⎣
1
0
0
⎤⎥⎦)]
∂b1
∂v ′y1
= R′1[qc ⊗ (
∂e1
∂d1
⎡⎢⎣
0
1
0
⎤⎥⎦)].
(41)
In this way, the derivative ∂b1∂v can be computed analytically.
ACKNOWLEDGMENT
The authors would like to thank Dr. Hamid Sheikh at TexasInstruments for introducing us to open research problems invideo acquisition in cellphone cameras.
REFERENCES
[1] C. Jia and B. L. Evans, “Online calibration and synchronization ofcellphone camera and gyroscope,” in Proc. IEEE Global Conf. SignalInform. Process., Dec. 2013, pp. 731–734.
[2] D. Strelow and S. Singh, “Motion estimation from image and inertialmeasurements,” Int. J. Robot. Res., vol. 23, no. 12, pp. 1157–1195,Dec. 2004.
[3] A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint Kalmanfilter for vision-aided inertial navigation,” in Proc. IEEE Int. Conf.Robot. Autom., Apr. 2007, pp. 3565–3572.
[4] D. Strelow and S. Singh, “Online motion estimation from image andinerital measurements,” in Proc. Workshop Integr. Vis. Inertial Sensors,University of Coimbra, Portugal, Jun. 2003.
[5] P. Corke, J. Lobo, and J. Dias, “An introduction to inertial and visualsensing,” Int. J. Robot. Res., vol. 26, no. 6, pp. 519–535, Jun. 2007.
[6] Z. Zhang, “A flexible new technique for camera calibration,” IEEE Trans.Pattern Anal. Mach. Intell., vol. 22, no. 11, pp. 1330–1334, Nov. 2000.
[7] J. Lobo and J. Dias, “Relative pose calibration between visual andinertial sensors,” Int. J. Robot. Res., vol. 26, no. 6, pp. 561–575,Jun. 2007.
[8] C. Geyer, M. Meingast, and S. Sastry, “Geometric models of rolling-shutter cameras,” in Proc. Workshop Omnidirectional Vis., Beijing,China, 2005.
[9] S. Baker, E. Bennett, S. B. Kang, and R. Szeliski, “Removing rollingshutte wobble,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit.,Jun. 2010, pp. 2392–2399.
[10] P.-E. Forssen and E. Ringaby, “Rectifying rolling shutter video fromhand-held devices,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit.,Jun. 2010, pp. 507–514.
[11] A. Karpenko, D. Jacobs, J. Baek, and M. Levoy, “Digital video stabi-lization and rolling shutter correction using gyroscopes,” Stanford Univ.,Stanford, CA, USA, Tech. Rep. CSTR 2011-03, Mar. 2011.
[12] M. Hwangbo, J.-S. Kim, and T. Kanade, “Gyro-aided feature trackingfor a moving camera: Fusion, auto-calibration and GPU implementa-tion,” Int. J. Robot. Res., vol. 30, no. 14, pp. 1755–1774, Dec. 2011.

JIA AND EVANS: ONLINE CAMERA-GYROSCOPE AUTOCALIBRATION 5081
[13] G. Hanning, N. Forslow, P.-E. Forssen, E. Ringaby, D. Tornqvist, andJ. Callmer, “Stabilizing cell phone video using inertial measurementsensors,” in Proc. IEEE Int. Conf. Comput. Vis. Workshops, Nov. 2011,pp. 1–8.
[14] B. Lucas and T. Kanade, “An iterative image registration techniquewith application to stereo vision,” in Proc. Int. Joint Conf. Artif. Intell.,vol. 81. 1981, pp. 674–679.
[15] L. Kneip, R. Y. Siegwart, and M. Pollefeys, “Finding the exact rotationbetween two images independently of the translation,” in Proc. 12th Eur.Conf. Comput. Vis., Oct. 2012, pp. 696–709.
[16] R. Hartley and A. Zisserman, Multiple View Geometry in ComputerVision. Cambridge, U.K., Cambridge Univ. Press, 2004.
[17] L. Oth, P. Furgale, L. Kneip, and R. Siegwart, “Rolling shutter cam-era calibration,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit.,Jun. 2013, pp. 1360–1367.
[18] J. Civera, D. R. Bueno, A. J. Davison, and J. M. M. Montiel, “Cameraself-calibration for sequential Bayesian structure from motion,” in Proc.IEEE Int. Conf. Robot. Autom., May 2009, pp. 403–408.
[19] S.-H. Jung and C. J. Taylor, “Camera trajectory estimation using inertialsensor measurements and structure from motion results,” in Proc. IEEEComput. Soc. Conf. Comput. Vis. Pattern Recognit., vol. 2. Dec. 2001,pp. II-732–II-737.
[20] A. Davison, “Real-time simultaneous localisation and mappingwith a single camera,” in Proc. 9th IEEE Int. Conf. Comput. Vis., vol. 2.Oct. 2003, pp. 1403–1410.
[21] D. Nistér, O. Naroditsky, and J. Bergen, “Visual odometry,” in Proc.IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., vol. 1.Jun./Jul. 2004, pp. I-652–I-659.
[22] F. M. Mirzaei and S. I. Roumeliotis, “A Kalman filter-based algo-rithm for IMU-camera calibration: Observability analysis and perfor-mance evaluation,” IEEE Trans. Robot., vol. 24, no. 5, pp. 1143–1156,Oct. 2008.
[23] J. Kelly and G. S. Sukhatme, “Visual-inertial sensor fusion: Localization,mapping and sensor-to-sensor self-calibration,” Int. J. Robot. Res.,vol. 30, no. 1, pp. 56–79, Jan. 2011.
[24] C. Jia and B. L. Evans, “Probabilistic 3-D motion estimation for rollingshutter video rectification from visual and inertial measurements,” inProc. IEEE Int. Workshop Multimedia Signal Process., Sep. 2012,pp. 203–208.
[25] M. Li, B. H. Kim, and A. I. Mourikis, “Real-time motion trackingon a cellphone using inertial sensing and a rolling shutter camera,” inProc. IEEE Int. Conf. Robot. Autom., May 2013, pp. 4712–4719.
[26] S. Lovegrove, A. Patron-Perez, and G. Sibley, “Spline fusion:A continuous-time representation for visual-inertial fusion with appli-cation to rolling shutter cameras,” in Proc. Brit. Mach. Vis. Conf.,Sep. 2013, pp. 93.1–93.12.
[27] M. Li and A. I. Mourikis, “3-D motion estimation and online temporalcalibration for camera-IMU systems,” in Proc. IEEE Int. Conf. Robot.Autom., May 2013, pp. 5709–5716.
[28] L. Kneip, A. Martinelli, S. Weiss, D. Scaramuzza, and R. Siegwart,“Closed-form solution for absolute scale velocity determination com-bining inertial measurements and a single feature correspondence,” inProc. IEEE Int. Conf. Robot. Autom., May 2011, pp. 4546–4553.
[29] A. Martinelli, “Vision and IMU data fusion: Closed-form solutions forattitude, speed, absolute scale, and bias determination,” IEEE Trans.Robot., vol. 28, no. 1, pp. 44–60, Feb. 2012.
[30] C.-K. Liang, L.-W. Chang, and H. H. Chen, “Analysis and compensationof rolling shutter effect,” IEEE Trans. Image Processing, vol. 17, no. 8,pp. 1323–1330, Aug. 2008.
[31] D. Simon, Optimal State Estimation. New York, NY, USA: Wiley, 2006.
[32] N. Trawny and S. Roumeliotis, “Indirect Kalman filter for 3D attitudeestimation,” Dept. Comput. Sci. Eng., Univ. Minnesota, Minneapolis,MN, USA, Tech. Rep. 2005-002, Mar. 2005.
[33] J. J. More, “The Levenberg–Marquardt algorithm, implementation andtheory,” Numer. Anal., vol. 630, pp. 105–116, 1978.
[34] M. A. Fischler and R. C. Bolles, “Random sample consensus:A paradigm for model fitting with applications to image analysis andautomated cartography,” Commun. ACM, vol. 24, no. 6, pp. 381–395,Jun. 1981.
[35] M. Grundmann, V. Kwatra, D. Castro, and I. Essa, “Calibration-freerolling shutter removal,” in Proc. IEEE Int. Conf. Comput. Photogr.,Apr. 2012, pp. 1–8.
[36] K. Yamaguchi. Mexopencv. [Online]. Available: http://www.cs.stonybrook.edu/∼kyamagu/mexopencv/, accessed Sep. 2013.
Chao Jia received the B.S. degree in electrical engi-neering from Tsinghua University, Beijing, China,in 2009, and the M.S. and Ph.D. degrees in electri-cal and computer engineering from the Universityof Texas at Austin, Austin, TX, USA, in 2011and 2014, respectively. Since 2014, he has been aSenior System Engineer with Qualcomm Research,San Diego, CA, USA. His research has been focusedon computational photography for smart phonecameras.
Brian L. Evans received the B.S. degree in electricalengineering and computer sciences from the Rose-Hulman Institute of Technology, Terre Haute, IN,USA, in 1987, and the M.S. and Ph.D. degrees inelectrical engineering from the Georgia Institute ofTechnology, Atlanta, GA, USA, in 1988 and 1993,respectively. From 1993 to 1996, he was a Post-Doctoral Researcher in Electronic Design Automa-tion with the University of California at Berkeley,Berkeley, CA, USA. In 1996, he joined the facultywith the University of Texas at Austin (UT Austin),
Austin, TX, USA, where he currently holds the Engineering FoundationProfessorship.
He bridges signal processing theory and embedded real-time implementationfor digital communications and digital image/video processing. His researchincludes interference mitigation for communication systems, testbeds for smartgrid communications, multiple antennas for next-generation cellular systems,and video stabilization and rectification for smart phone cameras.
Prof. Evans has authored over 220 refereed publications, and graduated24 Ph.D. and nine M.S. students. He received two best papers awards at theIEEE International Conferences and three teaching awards at UT Austin, anda recipient of the 1997 U.S. National Science Foundation CAREER Award.