Embed Size (px)
Citation preview
IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001 1039
On Velocity Estimation and Correlation Properties ofNarrow-Band Mobile Communication Channels
Cihan Tepedelenlioglu and Georgios B. Giannakis, Fellow, IEEE
Abstract—Estimation of the maximum Doppler spread or,equivalently, the vehicle velocity, is useful in improving handoffalgorithms and necessary for the optimal tuning of parameters forsystems that adapt to changing channel conditions. We providea novel velocity estimator based on the spectral moments of thein-phase and the quadrature phase components or the envelopeof the received signal. We characterize the joint effects of theRicean factor, the directivity and the angle of nonisotropicscattering, and the effects of additive white noise on our estimatorand other covariance-based velocity estimators analytically. Wealso prove the mean-square consistency of the covariance-basedvelocity estimators under some assumptions on the angle of arrivaldistribution. Simulations illustrate our approach and comparewith existing techniques.
Index Terms—Fading channel models, velocity estimation.
I. INTRODUCTION
I N mobile communication systems, the received signalstrength varies significantly in space due to constructive and
destructive interference arising due to multipath components, aphenomenon also known as small scale fading [18]. The mobilevelocity dictates how fast in time the fading is experiencedby the receiver, and its knowledge at the base station can beutilized for handoff purposes. This is because the average signalstrength is often the parameter that dictates handoff and itsaccurate but quick estimation introduces a tradeoff that neces-sitates the appropriate choice of a temporal averaging windowlength, which, in turn, is dependent on the mobile velocity [5].The base stations’ knowledge of the vehicle velocity is alsouseful in overlaid cell architectures where slow mobiles areassigned to microcells and fast ones to “umbrella” macrocells.
The mobile velocity is proportional to the maximumDoppler spread through , where is thecarrier frequency and is the speed of propagation. Hence,given the system parameters, estimatingand estimatingare equivalent. In many communication applications such asadaptive coding/modulation/antenna diversity/power control,knowledge of is of paramount importance in adaptingthe system parameters to new channel conditions [12], [6]. In
Manuscript received March 3, 2000; revised January 5, 2001. This work wassupported by ARO Grant DAAG55-98-1-0336, ARL Grant 7850-98, and theNSF Wireless Initiative Grant 9979443. Part of the results in this paper appearedin Proceedings of the 34th Conference on Information Sciences and Systems(CISS), March 2000, andProceedings of the Wireless Communication and Net-working Conference (WCNC), September 2000.
The authors are with the Department of Electrical and Computer Engi-neering, University of Minnesota, Minneapolis, MN 55455 USA (e-mail:[email protected]; [email protected]).
Publisher Item Identifier S 0018-9545(01)04888-5.
fact, when the angle-of-arrival (AOA) distribution is uniformand a line-of-sight (LOS) component is absent, is the soleparameter that determines the Doppler spectrum [13]. But asthe need for higher spectral efficiency increases, directionalantennas are used to avoid interference, making it necessary tocharacterize the effects of the LOS component and directionalscattering on velocity estimators.
In this paper, in addition to proposing novel velocity(Doppler) estimators, we characterize analytically, the ro-bustness of existing velocity estimators [level crossing rate(LCR)-based as well as covariance-based] to nonuniform AOAdistributions and the presence of a LOS component. Utilizingan intuitively appealing model, we prove the mean-squareconsistency of the in-phase and quadrature-phase (I/Q) com-ponents’ sample covariances under certain assumptions on theAOA distribution, which establishes the consistency of thecovariance-based estimators that rely on the I/Q components.As a byproduct of this derivation, we generalize Aulin’s result[4] for the covariance of the squared envelope to when the I/Qcomponents are correlated with each other. Using this result,we also show that the moment-based method to estimate theRicean -factor in [7] is useful even when the LOS componentis not perpendicular to the direction of the mobile, hence(sinusoidally) time varying. We illustrate by simulation thatwhen the sampling rate is high and the estimation windowis small, the covariance-based estimators have significantlysmaller sample variances than their LCR-based counterparts,and show that among the covariance-based estimators, theproposed method has the least sample variance in this regime.
In Section II, we provide a parametric model for the AOAdistribution, by using the von Mises probability density func-tion (pdf), also used in [1], [2], and provide the resulting corre-lation function, Doppler spectrum, LCR, and the covariance ofthe squared envelope as a function of the parameters of this pdfand the Ricean -factor. In Section III we introduce the pro-posed velocity estimator and in Section IV we delineate its re-lationship with other covariance-based estimators. In Section V,we derive the joint effect of the LOS factor, scattering directivityand their angles of arrival, on the covariance-based velocity es-timators. Section VI briefly outlines estimation of the Ricean
factor and Section VII analyzes the effect of additive whitenoise on covariance-based velocity estimators. In Section VIII,simulations illustrate the results.
A few words on notation. We will use for conjugate, forphase, for real part, and for imaginary part of a com-plex number; will denote mathematical expectation with re-spect to all the random variables within the brackets; and
denote the Krönecker’s delta function and Dirac’s delta
0018–9545/01$10.00 © 2001 IEEE

1040 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
function, respectively; Superscript will denote th deriva-tive, but if or , we will also use or , respectively;denotes base 10 logarithm; for a generic complex, stationarystochastic process , we use todenote its correlation function, and reserve
for the covariance function at lag.
II. CHANNEL MODEL
We will assume that the complex envelope of the narrow band(NB) randomly time-varying channel impulse response processin base-band is given as the sum of a diffuse component
and a specular component
(1)
whereindependent and identically distributed(i.i.d.) angles that the incoming wavesmake with the mobile direction, with den-sity functions given by ;i.i.d. phases, uniformly distributed on
;and deterministicconstants;
the Ricean factor, which is the ratio of thespecular component s power to the dif-fuse component ’s power;the angle that the LOS component makeswith the mobile direction;the power of the received signal;deterministic complex constants normal-ized to satisfy
, so that holds.Note that making arbitrarily large ensures to be aGaussian process due to the central limit theorem, resultingin being Ricean distributed. In the absence of a LOScomponent ( ), has a Rayleigh density. Because thephases are uniformly distributed on ,and, hence, . Notice that depends on timeif the LOS component is not perpendicular to the direction ofmotion ( ); hence, similar to [4] and [16], we allow fora sinusoidally time varying specular component.
It follows from (1) that the correlation function of isgiven by
(2)
by direct substitution and using the assumptions on, and.
We see from (2) that depends on the probability distri-bution of the angle of arrival . In order to capture the effectsof directional scattering on in a parametric fashion willuse the von Mises/Tikhonov distribution [15], [19]
(3)
wherethe th order modified Bessel function of the firstkind;the beamwidth;the angle that the average scattering direction makeswith the mobile direction.
Fig. 1 illustrates the von Mises distribution for different valuesof and [notice that reduces (3) to a uniformdistribution and that an will merely rotate the plot by
radians]. The von Mises distribution is widely used in direc-tional statistics [15] and has been justified empirically to be anaccurate model for the AOA distribution for NB channels [2]. Inaddition, the von Mises pdf enables us to relate, in closed form,the effect of to the Doppler spectrum, thecorrelation function and [2]. Since many velocity esti-mators that rely on the covariance as well as those that rely onLCR’s can be expressed as a function of ,we will use the closed-form expressions relatingto inevaluating how velocity estimators designed assuming1
are affected in environments for which . In what follows,we will, in part, extend the results in [2] to when a LOS is present( ).
Substituting (3) into (2) we see that the correlation functionis given by
(4)
where is the zeroth-order Bessel function of the first kind.Notice that (4) is complex valued in general, but it is real when
, yielding , the correlationfunction corresponding to Jakes’s model [13].
The Doppler spectrum is the Fourier transformof (2). Using the following relationship between the spec-trum and the density function of ,
,we obtain a closed-form expression for as a function ofthe directivity and the angle
(5)
1Note that = 0 implies uniform AOA with no LOS component.

TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1041
Fig. 1. The von Mises pdf.
Notice that (5) also reduces to Jakes’s “U-shaped” spectrum[13] when . In this case we have
.The derivatives of the correlation function of the diffuse com-
ponent at zero play an important part in estimating .They can be derived using (2) and (3) as
(6)
(7)
(8)
Equations (6)–(8) will enable us to characterize the effect ofon covariance-based velocity estimators in Section V.
Using the results in [16], it is also possible to see the effects ofdirectional scattering and the LOS component on the envelopelevel crossing rate (LCR). The LCR is defined as the expectednumber of envelope crossings per second of a given levelwithpositive slope, and can be shown to be (see, e.g., [18]),
LCR (9)
where is the joint probability density function ofthe envelope with its time derivative. In [16], the authors showedthat even in the presence of a specular component and corre-lated I/Q components of (which is caused by in our
model), the LCR of the envelope is proportional to and isentirely determined by
LCR
(10)
wherethe level;
in (1) (amplitude of the specular compo-nent);the error function;
;.
Hence, by virtue of the fact that we have a closed-form rela-tionship between and through equa-tions (6)–(8), we can numerically evaluate the effect ofand on LCR( , ) using (10). We will pursue this approachin the simulations and examine LCR /LCR whereLCR
, to see how directional scattering anda LOS component affect the LCR estimator that utilizes .A parametric model for asymmetrical Doppler spectra was alsoadopted in [16] and the effects of the parameters on the LCR was

1042 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
characterized using (10). Here, we use (10) to relate the LCR tothe AOA distribution in order to compare the LCR-based ve-locity estimators to their covariance-based counterparts.
The model in (1) also enables us to derive the autocovarianceof in closed form, which is given by
(11)
which can be derived by using (29) in the Appendix toobtain , and (2) to get . Aspecial case of this result was derived in [4] wherewas assumed to be real yielding
.Here, we extend this result to complex s (correlated I/Qcomponents) which occur when the scattering is directional.Note that (11) is a straightforward consequence of (29) in theAppendix and relative to the derivation in [4], it is simplerbecause it doesnot make use of such complicated expressionsas the joint pdf of , . One canuse the closed-form expression for in (4) and substituteit into (11) to explicitly see the effect of on . Noticethat when , (11) reduces to .
III. N OVEL VELOCITY ESTIMATOR
In this section, we propose novel velocity estimators that usewhen the I/Q components are measured or
estimated, or, utilize , when only the channel envelope isavailable. It is well-known that is directly proportional tothe second spectral moment, which is a measure of the Dopplerbandwidth, and a decreasing function of , the curvature of
at zero. This notion can be made more precise with thefollowing:
(12)
which is valid when , i.e., when. Since it is often unfeasible to estimateaccu-
rately, we will adopt the common strategy [3], [5] of assumingin designing our velocity estimator and subsequently
deriving the effect of on the estimator. Our velocity esti-mator aims at estimating and separately and uses(12) to get an estimate for . To this end, we will fit a parabolato the points of the sample correlations , where
is the sampling period. We will assume that the samplingrate is sufficiently high to insure , which issatisfied, for example, if channel samples used to estimate
and are provided by channel estimators of narrowband TDMA systems. The steps for estimating from theI/Q components of are as follows.
Step 1) Find the correlation estimates bysample averaging.
Step 2) Find.
Step 3) Obtain , .Step 4) Substitute , in (12).Note that the mapping from the correlation estimates
to the Taylor’s series coefficient estimatesthat solves the least squares problem in Step
2) is a linear transformation [a matrix multiplica-tion] which can be precomputed onceis known. Unlike [14],to estimate we will only use a second-order polynomial,which, in view of the fact that can be estimated from
for , obviates unnecessary approximations andthe need for finding the roots of a higher than second-orderpolynomial. Notice that, in practice, Steps 1)–4) will be appliedto or , which are obtained from the in-phaseand quadrature-phase components of the NB channel. In fact, itcan be shown using (1) that the correlation function ofis given by , which, in turn implies thatthe velocity estimator can be expressed in terms of as
.If we only have the envelope available, we can
use to estimate , by exploiting the fact that[cf. (11)], which can be used to
show
(13)
when . Hence, to estimate from , we wouldstill use steps 1)–4) except would be estimated
from and , would be substituted into(13) after it is computed.
IV. RELATIONSHIP WITH OTHER COVARIANCE-BASED
ESTIMATORS
In [11], Holtzman and Sampath proposed a covariance-basedDoppler estimator using the formula
(14)
where
and is a constant depending on whether ,, or . Anim–Appiah has analyzed this class of
covariance-based estimators in great detail in a recent paper[3], where he considered the cases and
.In order to relate the estimator in (14) to the proposed esti-
mator, it is important to realize that

TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1043
, where is the covariance function of , and re-call the following result from [5]:
(15)
which is a constant multiple of (12), when . Thelimit in (15) can be shown by substituting for
, moving the inside the square root and applyingL’Hôspital’s rule twice. Equation (15) illustrates that the covari-ance-based estimator in [11] is affected by a the sameway as the one proposed in Section III, whenis large andis small. In the next section we derive the effect ofon all ve-locity estimators that approximate (12) or (13), which includesthe proposed estimator, the estimator in [11] when ,or , and the zero crossing rate estimator that uti-lizes (henceforth just “ZCR”).
V. JOINT EFFECT OF AND ON
Using the expressions for in (6)–(8) wewill show that all velocity estimators under consideration thatare designed for , get scaled as a function of and
, and derive the corresponding scale function . Considerfirst the covariance-based estimators that approximate (12).Using (2), (6), and (8) we obtain
(16)
Notice that as expected. Examining (16) moreclosely, we realize that for large values of, the scale factoris not influenced by and and depends solely on the LOSdirection . An extreme case would be for large
, which would yield a Doppler estimate of . This isbecause in (1) would not be time-dependent, a situationwhere the received signal contains no information about.
Remark: It is well known that for the ZCR estimator(of either the in-phase or quadrature component) convergesto , a fact which requires the tobe Gaussian [18]. Hence, for , will be Gaussianand also the ZCR estimators will be scaled byin (16). On the other hand, when , if is assumedto be deterministic (Aulin’s model in [4]), then will notbe Gaussian and the expected ZCR [in the sense of (9) withthe joint pdf of the in-phase component with its derivative]
can be shown to be time-varying, which is not useful froma practical point of view. In order to be able to make astatement about how the ZCR estimator scales as a functionof when , we can argue as follows. If we assume
where is a Gaussian randomvariable independent of withso thatas before, then will be Gaussian. This has the nice conse-quence that ZCR = even when .Under this interpretation of the model in (1), we can concludethat (16) also applies to the ZCR estimator for any value of.
To derive the effect of on covariance-based estimators thatuse , we recall (13). Using (11) to calculate the right-handside of (13), we see that the estimator gets scaled by a factorof , where it is shown in (17) at the bottom of the page.Observe that the scale factor . Note also that for
, (17) reduces to, which is the result derived in [11] for uniform AOA.
Hence, (17) generalizes [11, eq. (6)] to when the angle of arrivaldistribution is not uniform.
We reiterate here that if the LCR of is to beused for velocity estimation, the effect of given byLCR /LCR can be computed numerically using(10). We will elaborate more on this in the simulation section.
VI. ESTIMATION OF THE RICEAN FACTOR
As we mentioned before, is a Ricean process with pa-rameter . It is well known that the value of is a measureof the severity of fading with being the most severeRayleigh fading, and representing no fading. Hence,the knowledge of the factor is important in link budget cal-culations [8]. Also, as we have seen in the previous sections, thepresence of the LOS factor introduces a modeling error in ve-locity estimation, which may be compensated for by estimating
. Greenwood and Hanzo in [8] have proposed techniques thatfit the distribution of the envelope to estimate , but thesetechniques are not well suited for online estimation. More re-cently, Greensteinet al. introduced a moment based method forestimating under the assumption that the LOS angle of ar-rival (i.e., is a constant) [7]. In this sec-tion, we will show that as a simple consequence of our frame-work, the estimator in [7] works also when [i.e., when
depends on time]. Consider (11) with to obtain:. By solving the resulting
quadratic equation for in terms of and we find
(18)
(17)
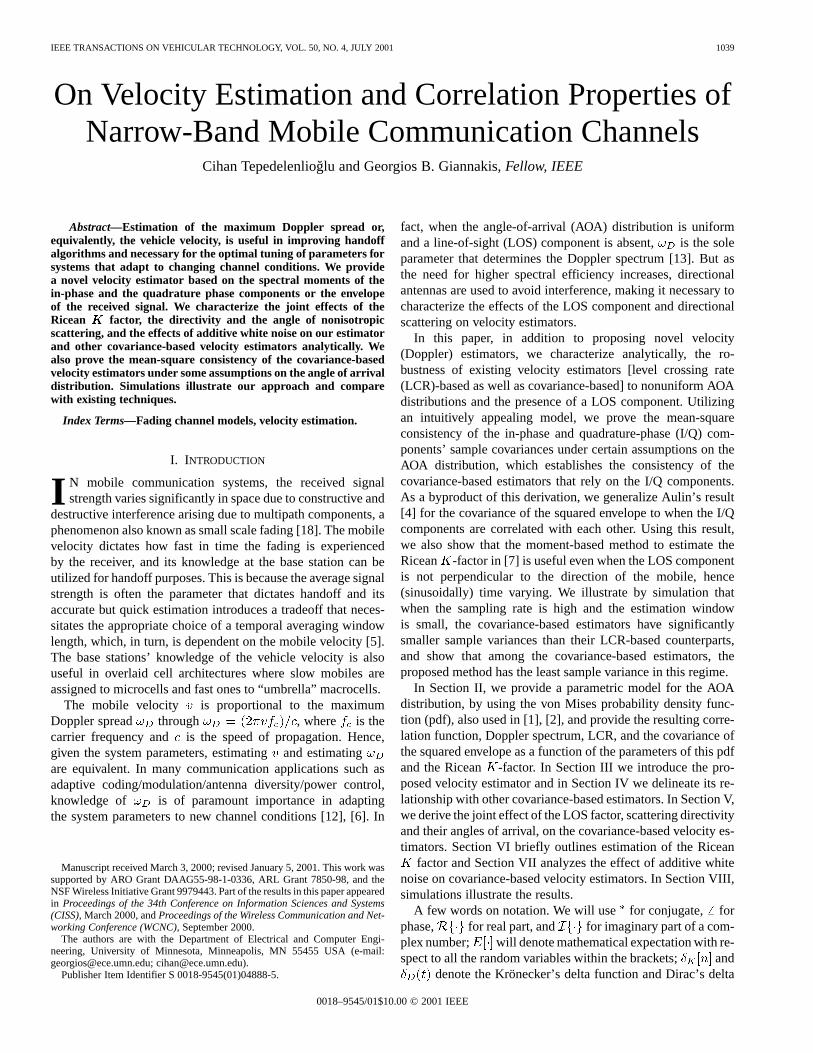
1044 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
(a)
(b)
Fig. 2. (a)C ( ) in (16) versus� andK, � = � = 0. (b)C ( ) in (16)versus� andK, � = � = �=2.
which is the result in [7]. Since and can be estimatedfrom , (18) provides us with an estimate of. It is im-portant to notice that need not be constant for (18) to hold,as was assumed in [7].
VII. EFFECT OFADDITIVE WHITE NOISE
In this section, we will discuss the effect of additive whitenoise that is assumed to be independent of , on the pro-posed estimator and the estimator in (14) originally proposed in[11]. The effect of additive noise on velocity estimators was ad-dressed in [5] and [11], where the noise was spectrally flat overa finite bandwidth, which results in colored noise in continuoustime. We evaluate the covariance-based velocity estimators in aframework where is estimated using noisy channel samplesobtained with pilot sequences. In such a setup, if the cascade
of the transmit and receive filters are designed to have Nyquistproperties to avoid intersymbol interference, the channel esti-mates will be corrupted by uncorrelated noise in discrete time.
First, we will discuss the effect of white noise on the covari-ance-based estimator given in (14) when
. As mentioned in Section IV, for large , (14) is givenby
(19)
which, assuming for simplicity that is zero-mean and usingthe independence of and , can be written as
(20)
where we used the fact that for . But weknow that since is small, we can use (15) to obtain
(21)
We see that if the SNR is moderate/low, withbeing very small, the second term in (21) will cause to
deviate from in a pronounced manner due to the presence ofnoise ( ). We also corroborate this in the simulations.
One way to overcome this limitation is to avoid byadopting the following variation on in (14):
(22)
for large . When is small, (22) yields, which, like (21), is also influenced by , but
not nearly as much because for moderate signal-to-noise ratios(SNRs), the denominator , so willnot deviate from significantly. This “denoising” approachis similar to the one suggested in [5] for robustness againstcochannel interference.
To circumvent the effect of white noise on our proposedscheme we will modify our algorithm as follows. Givennoisy channel estimates , wefirst obtain the estimates of
via sample averaging. We can then fit apolynomial to for ,discarding the lag to obtain estimates ,
. In contrast to (22), where the noise varianceaffects the estimator even for large, the proposed estimatoris asymptotically unaffected by the SNR. We also illustrate thiseffect in the simulations.
Notice that for the aforementioned method, we do not evenneed to know the noise variance since we can ignore the

TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1045
(a)
(b)
Fig. 3. (a)C ( ) in (17) versus� andK, � = � = 0. (b)C ( ) in (17)versus� andK, � = � = �=2.
white noise altogether by not using the lag . When thenoise is colored with known color, (as might be induced withtransmitter/receive filters without Nyquist properties) we canstill reduce the noise effects by subtracting the noise correla-tion from the estimate of , and proceed toestimate . This is a feature that cannot be equippedwith straightforwardly since the correlations are only implicitlycalculated in (14).
VIII. SIMULATIONS
In this section, we will compare the different velocity esti-mators designed for on the basis of how sensitivethey are to for large and on the basis of how fast theirsample estimates converge to their ensemble values.
For part , in Figs. 2–4, we plotted in (16), in(17), and LCR(1, )/LCR(1, ) as a function of and , with
, for and . In doing so, weillustrate the joint effects of the directivity and the LOS factoron velocity estimators, unlike existing analyzes in the literaturethat treat these effects individually. We chose in allplots because it is reasonable to assume that the LOS componentimpinges on the antenna with approximately the same angle asthe directional scattering. The range ,was dictated by commonly encountered values measured fromexperimental data [2], [7].
We observe that in the plots involving the envelope and the en-velope squared of the received signal (Figs. 3 and 4), increasing
decreases the scale functions, whereas for Fig. 1 which is de-rived for the I/Q components of , increasing increases thescale factor. We also notice that in Fig. 4, forand small , has little influence on the LCR. This fact wasobserved in [5], where only (constant specular com-ponent) was considered, and was used to design a velocity esti-mator based on the LCR of the envelope that is robust to varia-tions in . We see that when and is small, the LCR iseven less affected along values of, which illustrates that theLCR estimator is indeed robust to variations in. It should benoticed though, that the normalized LCR deviates from one forincreasing especially when , even though this deviationis less pronounced than that of and over practicalparameter ranges of interest, as we will soon show.
To gain further insight into how the velocity estimators be-have for arbitrary (not necessarily zero or ), we cal-culated the maximum and minimum values of , ,and LCR(1, )/LCR(1, ) over all possible where
, ,. In Table I, we list the maxima and minima
corresponding to the scale function for each velocity estimatoras well as the values of that attain these optima. We also com-puted the RMSE whereis , , or LCR(1, )/LCR(1, ). The RMSE valuequantifies the average deviation of the scale functions from theirideal value of one over for each estimator. We conclude thatthe LCR estimator is most robust to, , and over prac-tical ranges of these parameters.
In the remaining figures, we generate 100 different realiza-tions of and plot the histogram for the 100 velocity esti-mates normalized by the true velocity, corresponding to eachrealization, for the given method. The performance of each es-timator can be judged by how closely its histogram is clus-tered around one. In all experiments km/h, and
, which is the symbol period for the IS-54 TDMAstandard adopted in North America. The carrier frequency is
MHz implying Hz. For the proposedmethod we chose correlation lags.

1046 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
(a)
(b)
Fig. 4. (a) Deviation of LCR withK and�, � = � = 0. (b) Deviation ofLCR withK and�, � = � = �=2.
TABLE IEFFECT OF ON VELOCITY ESTIMATORS
In Figs. 5–9 we simulated the finite sample behavior of theproposed estimator, in (14), its “denoised” version in (22),and the velocity estimator that uses the LCR of , whichwe will denote by . In Figs. 5–9, all estimators not relyingon the level crossings utilize . We generated the NBsignal using the simulator in [10], which approximates Jakes’s
spectrum. We assumed all through, because we are inter-ested in analyzing the finite sample behavior of the aforemen-tioned estimators independent of any modeling error caused by
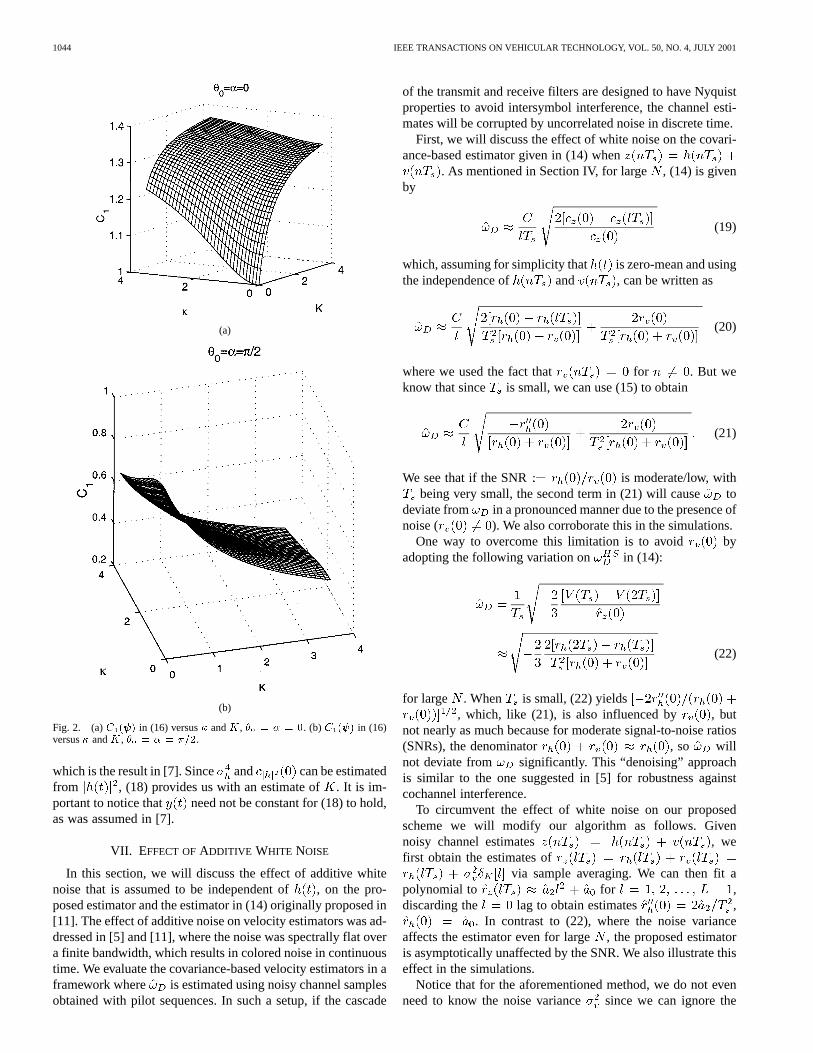
.In Fig. 5, we observe that for a time duration of 0.02 s (
samples) the sample variances of the covariance-based es-timators ( and the proposed) are an order of magnitudesmaller than their LCR-based counterpart, and that the proposedestimator has a slightly smaller sample variance than. Thisillustrates that as far as convergence of estimators to their en-semble values is concerned, at high sampling rates and smallestimation windows, covariance-based estimators are more re-liable than their LCR-based counterparts. This is because, forsuch small data lengths, the signal does not experience manylevel crossings as can also be seen from the top-left plot in Fig. 5.This large gap in the maximum Doppler spread estimator vari-ance for small window lengths between the LCR-based schemesand those that rely on the covariances, to the best of the authors’knowledge, have not been reported in the literature, and is im-portant to know in contexts where quick estimates of areneeded, such as adaptive modulation/coding.
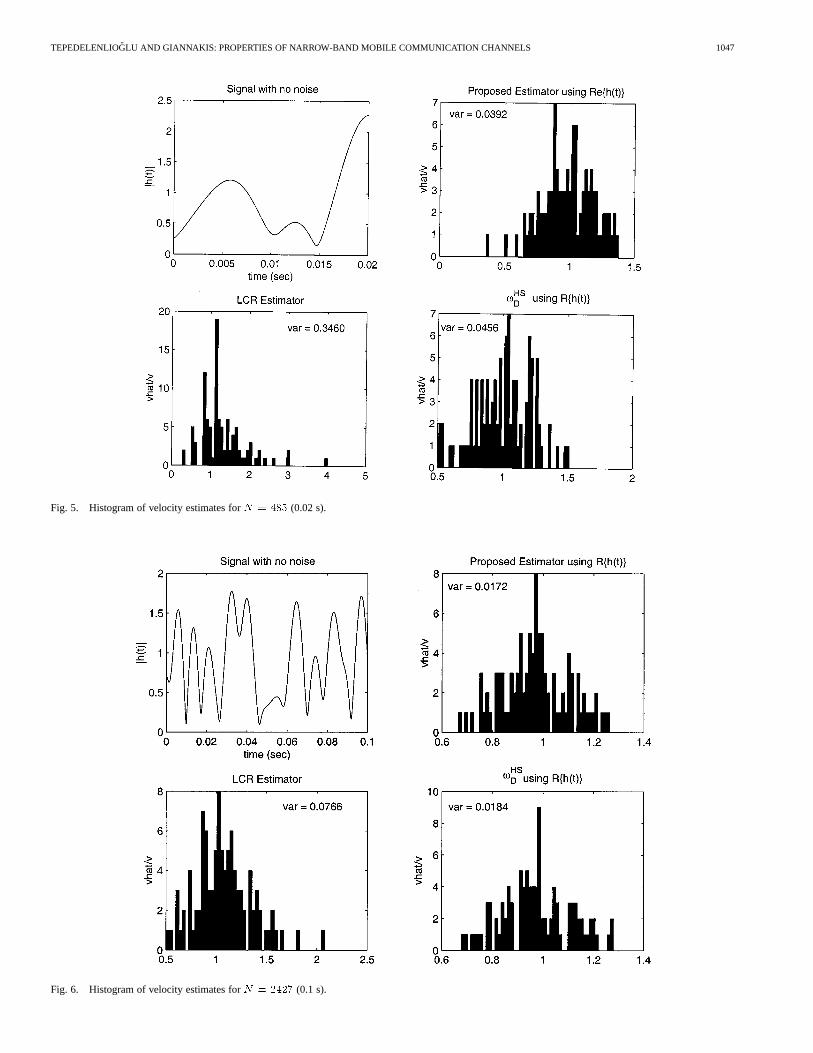
In Figs. 6 and 7 where we increase the time duration to 0.1 s( ) and 1 s ( ) respectively, we observe thatthe covariance-based estimators still perform better than ,but the gap in the sample variances decreases asincreases,which is what we should expect if all of the estimators are con-sistent.
In Figs. 8 and 9 we look at the effect of white noise at SNRdB. We observe that performs very poorly as ex-
plained by (21) and among the “denoised” covariance-based es-timators the proposed estimator has an order of magnitude lessvariance than the one in (22) in the presence of noise. In Fig. 10,we compared the proposed estimator employing , theproposed estimator using and the modified (“denoised”)estimator in (22) using . We see that at SNR dBand a data length of the estimator that employs thesquared envelope has significantly better variance than the othertwo estimators.
In conclusion, we see that as far as the convergence of sampleestimates and sensitivity to white noise is concerned, the pro-posed estimator (whether it uses the envelope or the I/Q com-ponents) is always the best alternative, when . The intu-itive explanation for this is that the proposed estimator involvesmore correlation lags and hence it is more reliable as comparedto . Naturally, utilizing more correlation lags to improveperformance comes at the expense of more computational com-plexity.
IX. CONCLUSION
In this paper, we proposed novel velocity estimators whichare shown by the simulations to outperform the existing covari-ance-based, and LCR-based estimators in the sense of speed ofconvergence and robustness to white noise. We also showed thatall the velocity estimators that are discussed get scaled as a func-tion of , and derived this scale function for each estimator. Weestablished the mean-square consistency of the sample covari-ances of under some assumptions on and argued that
TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1047
Fig. 5. Histogram of velocity estimates forN = 485 (0.02 s).
Fig. 6. Histogram of velocity estimates forN = 2427 (0.1 s).

1048 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
Fig. 7. Histogram of velocity estimates forN = 24 271 (1 s).
Fig. 8. Histogram of velocity estimates forN = 485, SNR= 20 dB.

TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1049
Fig. 9. Histogram of velocity estimates forN = 2427, SNR= 20 dB.
Fig. 10. Histogram of velocity estimates forN = 2427, SNR= 20 dB.

1050 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
this implies the consistency of and of the proposed esti-mator utilizing . We saw in the process of deriving theconsistency of the sample covariances of that we can gen-eralize Aulin’s result [4] for the covariance of to when
is complex, using a simpler derivation. This expressionled to the verification of an estimator originally proposed [7]for the Ricean factor that is based on moments of andthe recognition of the fact that this estimator is a valid one evenwhen is time variant.
APPENDIX
In this Appendix, we will show that the sample covariance ofin (1) converges to its ensemble value in (2), whenever the
angular distribution is bounded.2
Variance of the sample covariancecan be expressed as
(23)
We will first evaluate the expectation in the double sum using(1) after substituting . It is easy to verifythe following from (1): 1) ; 2)
(i.e., unconjugated correlations of are zero); and3) , where are eitheror , which means that any expectation containing exactlythree terms of is zero regardless of whether any of the termsis conjugated or not. It is not surprising that 1)–3) can be shownusing (1) since is a Gaussian process. Using 1)–3) above,we can write
(24)
It is straightforward to derive the last three terms as
(25)
The computation of the first term is more involved. Sinceare uniformly distributed
2We will adopt the convention that iff(t) is a function of a continuous vari-able,f [n] := f(nT ) denotes a sequence consisting of itsT -spaced samples.
[17, p. 168], where for compact notation. Thenis given by
(26)
which can be reduced to
(27)
But since the amplitudes satisfy, it follows that
. Hence, (26) is given by
(28)
Combining (25) and (28), (24) can be written as
(29)
In order to compute (23), we use (2) and (29) to obtain
(30)

TEPEDELENLIOGLU AND GIANNAKIS: PROPERTIES OF NARROW-BAND MOBILE COMMUNICATION CHANNELS 1051
Reducing the double sum in (30) into a single sum, the varianceof the covariance estimator can finally be expressed as
(31)
Clearly, depends on the covariance of , which, inturn, depends on the angle of arrival distribution through(2). Since the last term in (31) goes to zero as , we willconcentrate on the sum in (31). Interchanging the expectationintegral with the sum we obtain
(32)
But it is well known [17] that the sum in the first term in (32)converges to zero as except on a set of measure zero:
: . Hence, if is bounded, the firstterm in (32) goes to zero as , and a similar argumentholds for the second term. This proves the mean-square consis-tency of .
Remarks:
1) Notice that when the AOA distribution is uniform (Jakes’smodel), is consistent.
2) Since converges to a nonzero random variable in themean-square sense, we conclude that and the pro-posed estimator are continuous functions of the samplecorrelations and, hence, they are mean-square consistentas well.
3) If , yielding a finite numberof distinctfrequencies in (1), is not bounded. In thiscase, the first term in (31) does not go to zero as
, implying that the sample autocorrelation isnotmean-square consistent, agreeing with [9, p. 210], which assertsthat the sample autocovariance for a Gaussian process isinconsistent whenever the discrete spectrum is present.This also illustrates that the consistency result obtained inthis Appendix is not entirely academic and that the samplecorrelations are not consistent in all situations of practicalinterest.
REFERENCES
[1] A. Abdi and M. Kaveh, “A new velocity estimator for cellular systemsbased on higher order crossings,” inProc. 32nd Asilomar Conf. Sig-nals, Systems, and Computers, Pacific Grove, CA, Nov. 1–4, 1998, pp.1423–1427.
[2] A. Abdi, H. A. Barger, and M. Kaveh, “A parametric model for the dis-tribution of the angle of arrival and the associated correlation functionand power spectrum at the mobile station,” IEEE Trans. Veh. Technol.,submitted for publication.
[3] K. D. Anim-Appiah, “On generalized covariance-based velocity estima-tion,” IEEE Trans. Veh. Technol., vol. 48, pp. 1546–1557, Sept. 1999.
[4] T. Aulin, “A modified model for the fading signal at a mobile radiochannel,” IEEE Trans. Veh. Technol., vol. 28, pp. 182–203, Aug.VT-1979.
[5] M. D. Austin and G. L. Stüber, “Velocity adaptive handoff algorithms formicrocellular systems,”IEEE Trans. Veh. Technol., vol. 43, pp. 549–561,Aug. 1994.
[6] M. J. Chu and W. E. Stark, “Effect of mobile velocity on communi-cations in fading channels,”IEEE Trans. Veh. Technol., vol. 49, pp.202–210, Jan. 2000.
[7] L. J. Greenstein, D. G. Michelson, and V. Erceg, “Moment-methodestimation of the RiceanK-factor,” IEEE Commun. Lett., vol. 3, pp.175–176, June 1999.
[8] D. Greenwood and L. Hanzo, “Characterization of mobile radio chan-nels,” inMobile Radio Communications, R. Steele, Ed. London, U.K.:Pentech, 1992, pp. 163–185.
[9] E. J. Hannan,Multiple Time Series. New York: Wiley, 1970.[10] P. Höher, “A statistical discrete-time model for the WSSUS multipath
channel,”IEEE Trans. Veh. Technol., vol. 41, pp. 461–468, Nov. 1992.[11] J. M. Holtzman and A. Sampath, “Adaptive averaging methodology for
handoffs in cellular systems,”IEEE Trans. Veh. Technol., vol. 44, pp.59–66, Feb. 1995.
[12] S. Hu, T. Eyceöz, A. Duel-Hallen, and H. Hallen, “Transmitter antennadiversity and adaptive signaling using long range prediction for fastfading DS/CDMA mobile radio channels,” inProc. WCNC ’99, vol. 2,New Orleans, LA, 1999, pp. 824–828.
[13] W. C. Jakes,Microwave Mobile Communications. New York: IEEEPress, 1974.
[14] J. Lin and J. G. Proakis, “A parametric method for Doppler spectrumestimation in mobile radio channels,” inProc. 27th CISS. Baltimore,MD, Mar. 1993, pp. 875–880.
[15] K. V. Mardia, Statistics of Directional Data. New York: Academic,1972.
[16] M. Pätzold, U. Killat, and F. Laue, “An extended Suzuki model for landmobile satellite channels and its statistical properties,”IEEE Trans. Veh.Technol., vol. 47, pp. 617–630, May 1998.
[17] P. Stoica and R. Moses,Introduction to Spectral Analysis. EnglewoodCliffs, NJ: Prentice-Hall, 1997.
[18] G. L. Stüber,Principles of Mobile Communication. Norwell, MA:Kluwer, 1996.
[19] V. I. Tikhonov, “The effects of noise on phase-lock oscillation opera-tion,” Automat. i Telemekhanika, vol. 22, no. 9, 1959.
Cihan Tepedelenlioglu was born in Ankara, Turkey,in 1973. He received the B.S. degree (highest honors)from Florida Institute of Technology, Melbourne, in1995 and the M.S. degree from the University of Vir-ginia, Charlottesville, in 1998, both in electrical engi-neering. He is currently working toward the Ph.D. de-gree from the University of Minnesota, Minneapolis,in the Department of Electrical and Computer Engi-neering.
Since January 1999, he has been working as aResearch Assistant at the University of Minnesota,
His research interests include statistical signal processing, system identifica-tion, time-varying systems, and modeling, tracking, and equalization of fadingchannels in mobile communications.

1052 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 50, NO. 4, JULY 2001
Georgios B. Giannakis (S’84–M’86–SM’91–F’97) received the Diplomain electrical engineering from the National Technical University of Athens,Greece, 1981, the M.Sc. degrees in electrical engineering and mathematics, in1983 and 1986, respectively, and the Ph.D. degree in electrical engineering, in1986, all from the University of Southern California (USC), Los Angeles.
After lecturing for one year at USC, he joined the University of Virginia,Charlottelville, in 1987, where he became a Professor of electrical engi-neering in 1997. Since 1999, he has been with the University of Minnesota,Minneapolis, as a Professor of electrical and computer engineering. He is afrequent consultant for the telecommunications industry. His general interestsspan the areas of communications and signal processing, estimation anddetection theory, time-series analysis, and system identification—subjectson which he has published more than 120 journal papers, 250 conferencepapers and two edited books. Current research topics focus on transmitter andreceiver diversity techniques for single- and multi-user fading communicationchannels, redundant precoding and space-time coding for block transmissions,multicarrier, and wide-band wireless communication systems.
Dr. Giannakis has received three Best Paper Awards form the IEEE SignalProcessing (SP) Society (1992, 1998, 2000) and the Society’s TechnicalAchievement Award in 2000. He coorganized three IEEE-SP Workshops(OHS–1993, SAP–1996, and SPAWN–1997) and guest (co)edited four specialissues. He has served as an Associate Editor for the IEEE TRANSACTIONS ON
SIGNAL PROCESSINGand the IEEE SIGNAL PROCESSINGLETTERS. He was asecretary of the SP Conference Board, a member of the SP Publications Boardand a member and vice-chair of the Statistical Signal and Array ProcessingCommittee. He is a member of the Editorial Board for the PROCEEDINGS OF
THE IEEE, he chairs the SP for Communications Technical Committee andserves as the Editor-in-Chief for the IEEE SIGNAL PROCESSINGLETTERS. He isa member of the IEEE Fellows Election Committee and the IEEE-SP Society’sBoard of Governors.





























