Embed Size (px)
Citation preview

EMERGING AREA www.rsc.org/softmatter | Soft Matter
Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online / Journal Homepage / Table of Contents for this issue
On the suitability of carbon nanotube forests as non-stick surfacesfor nanomanipulation
Kjetil Gjerde,a R. T. Rajendra Kumar,a Karin Nordstrøm Andersen,a Jakob Kjelstrup-Hansen,b
Ken B. K. Teo,b William I. Milne,c Christer Persson,d Kristian Mølhave,a Horst-Gunther Rubahnb
and Peter Bøggild*a
Received 2nd July 2007, Accepted 23rd November 2007
First published as an Advance Article on the web 16th January 2008
DOI: 10.1039/b709870g
A carbon nanotube forest provides a unique non-stick surface for nanomanipulation, as the
nanostructuring of the surface allows micro- and nanoscale objects to be easily removed after first
being deposited via a liquid dispersion. A common problem for smooth surfaces is the strong initial
stiction caused by adhesion forces after deposition onto the surface. In this work, carbon nanotube
forests fabricated by plasma-enhanced chemical vapour deposition are compared to structures with
a similar morphology, silicon nanograss, defined by anisotropic reactive ion-etching. While
manipulation experiments with latex microbeads on structured as well as smooth surfaces (gold,
silicon, silicon dioxide, Teflon, diamond-like carbon) showed a very low initial stiction for both carbon
nanotube forests and silicon nanograss, a homogeneous distribution of particles was significantly easier
to achieve on the carbon nanotube forests. Contact-angle measurements during gradual evaporation
revealed that the silicon nanograss was superhydrophic with no contact-line pinning, while carbon
nanotube forests in contrast showed strong contact-line pinning, as confirmed by environmental
scanning electron microscopy of microdroplets. As a consequence, latex microbeads dispersed on the
surface from an aqueous solution distributed evenly on carbon nanotube forests, but formed large
agglomerates after evaporation on silicon nanograss. Lateral manipulation of latex microbeads with
a microcantilever was found to be easier on carbon nanotube forests and silicon nanograss compared
to smooth diamond-like carbon, due to a substantially lower initial stiction force on surfaces with
nanoscale roughness. Nanomanipulation of bismuth nanowires, carbon nanotubes and organic
nanofibres was demonstrated on carbon nanotube forests using a sharp tungsten tip. We find that the
reason for the remarkable suitability of carbon nanotube forests as a non-stick surface for
nanomanipulation is indeed the strong contact-line pinning in combination with the nanostructured
surface, which allows homogeneous dispersion and easy manipulation of individual particles.
1. Introduction
Nanostructures, such as carbon nanotubes (CNTs), III–IV and
silicon semiconductor nanowires, metallic nanowires and
organic nanofibres are candidates for future nanoelectronic
and nanoelectromechanical devices. These are often stored in
liquid solution for convenience, or because they are initially
synthesized in liquid. This solution can then be dispersed on
a surface, leaving the nanostructures randomly scattered after
evaporation of the solvent. This may then be followed by identi-
fication of a suitable specimen and lithographic definition of elec-
trical contacts to the object.1,2 For prototyping, characterisation
aMIC - Dept. of Micro- and Nanotechnology, NanoDTU, TechnicalUniversity of Denmark, Bldg 345 East, DK-2800 Kongens Lyngby,Denmark. E-mail: [email protected]; Fax: +45 4588 7762; Tel: +454525 5787bNanoSYD, Mads Clausen Institute, University of Southern Denmark,Alsion 2, DK-6400 Sønderborg, DenmarkcDept. of Engineering, University of Cambridge, Trumpington Street,Cambridge, UK, CB2 1PZdDivision of Materials Engineering, Lund Institute of Technology, LundUniversity, SE-22100 Lund, Sweden
392 | Soft Matter, 2008, 4, 392–399
and metrology, it is often desirable to move the nanostructures
onto a test device such as a substrate for transmission electron
microscopy analysis3 or an electrode pair.4 Picking and placing
of a small structure is, however, highly challenging.5–7 Firstly,
accessing a small structure lying flat on a surface is difficult per
se, and secondly, the ubiquitous adhesion forces8 on the micro-
and nanoscale may even prevent detachment and manipulation
in any reproducible manner.9 Carbon nanotubes and nanowires
tend to stick well to any surface,10 and manipulation is often only
possible if the objects are partly suspended from an edge, or if
they are free-standing on a surface.11 Whereas manipulation of
crystalline, inorganic structures like carbon nanotubes and semi-
conductor nanowires is in some cases feasible due to the stiffness
and high mechanical strength, there is a large class of organic
fibres and macromolecular structures that are interesting from
the point of view of applications as well as basic research, but are
also impossible to manipulate without damaging the structures.
As an example, the self-assembling para-hexaphenylene (p-6P)
nanofibres are very soft and fragile, breaking at a shear stress of
just 20 MPa.9 It has been shown that once the p-6P nanofibres
were dispersed on a Teflon surface, only very short pieces of
these roughly 50 nm tall and 300 nm wide nanofibres could be
This journal is ª The Royal Society of Chemistry 2008

Kjetil Gjerde obtained his MSc in Physics from the Norwegian University of Science and Technology in 1999. From 2000 to 2003 he
worked with 3D tectonic modeling for the International Research Institute of Stavanger. In 2006 he obtained his PhD from the Technical
University of Denmark, department of Micro and Nanotechnology, under the supervision of Peter Bøggild working on integration of
carbon nanotubes into microsystems. He is currently employed by StatoilHydro ASA conducting research on gas-to-liquids technology.
R. T. Rajendra Kumar worked on fabrication of micro-infrared sensors and received his PhD in Physics from Bharathiar University in
2003. From 2003 to 2005 he worked at Stockholm University as a Post-doctoral Fellow on fabrication of SiO2 nano-capillary arrays
for manipulating highly charged ions. From 2005 to 2006 he worked in Dublin City University as a Post-doctoral Fellow on integration
of ZnO nanorods with silicon for nanodevice applications. Since 2007, he has been working at MIC, Technical University of Denmark
as a Post-doctoral Fellow on fabrication of nanotools and nanosurfaces for advanced nanomanipulation and micro/nanofluidics.
Karin Nordstrøm Andersen received her MSc in Physics and Mathematics in 1999 from the University of Arhus, Denmark. In 2005 she
received her PhD from The Technical University of Denmark working with optical components for telecommunication based on high index
materials. From 2005 she has been working as a Postdoc. at the Department of Nano- and Microtechnology at the Technical University of
Denmark on tools for manipulation of nanostructures. The project is part of a European project, Nano-robotic for Assembly and Charac-
terization, which will allow an untrained operator to interact with nano-scale objects for characterization, sorting and assembly tasks.
Peter Bøggild received his PhD at Copenhagen University in 1998 in the field of experimental low temperature physics, and was employed
as an Associate Professor at MIC from 1998 to 2001 where he investigated applications for micro-scale four-point probes. In 2001 he was
appointed Associate Professor and concentrated on development of nanoscale robotic tools for manipulation, assembly and characteriza-
tion of nanostructures and system-level integration of nanostructures. He is currently heading the Nanointegration research group at MIC
– Department for Micro- and Nanotechnology, at the Technical University of Denmark.
Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
pushed laterally along the surface using the tip of an atomic force
microscope.9 It was not possible to lift the organic nanofibres
away from the surface at all.
Introduction of roughness and structure on surfaces is a well-
known method of reducing the adhesion and stiction effects.8,12
Recently, we demonstrated that p-6P nanofibres dispersed onto
dense forests of vertically aligned carbon nanotubes,13 could
easily be lifted off the surface using a sharp tip. It was also shown
that the stiction (static friction) of latex microbeads was substan-
tially smaller on CNT forests than on Teflon.
A surface for nanomanipulation of dispersed structures should
fulfil two criteria. Firstly, any dispersed structure should be
possible to remove afterwards, implying a small interaction
between the surface and the object. Secondly, the surface should
be easy to wet, so that the liquid dispersion spreads out and evap-
orate evenly, leaving a homogeneous distribution of structures
on the surface. These two criteria at first seem mutually exclu-
sive; the first criterion is fulfilled by a hydrophobic surface, while
the second points to a hydrophilic surface. For instance, the lotus
leaf is micro- and nanostructured to create a hydrophobic
surface on which water forms nearly spherical droplets. As the
droplets roll off they remove surface dust particles in the process.
The surface tension of the water gives rise to collection and
removal of the particles rather than deposition and distribution.
Roughness on the micro- or nanoscale can also cause pinning of
the contact line,14,15 which may introduce contact-angle hyster-
esis, i.e. a difference of the advancing and receding contact angle.
Wier and McCarthy16 pointed out that apparently superhydro-
phobic surfaces can be wetted after condensation of water
vapour, which drastically increases the hysteresis and thus
reduces the water-repellent properties.
The reason for this complex behaviour is that a highly struc-
tured surface can sustain two different wetting states, which
may both lead to superhydrophobicity. In the Wenzel regime17
the surface is fully wetted, and here the apparent contact angle
q0 is determined through a roughness factor r (ratio of actual
This journal is ª The Royal Society of Chemistry 2008
area of rough surface to the apparent area of the corresponding
smooth surface), and the thermodynamic contact angle q,
cosq0 ¼ r(cosq) (1)
Since r is always greater than 1, for q < 90�, the apparent
contact angle q0 will be smaller, whereas q0 will be higher if q >
90�, effectively enhancing the hydrophobicity. In the Cassie
regime18 the droplet is resting on top of the protrusions, and is
therefore in ‘‘contact’’ with both solid and air pockets trapped
between the protrusions. The apparent contact angle is then
cosq0 ¼ f1(cosq) � f2, (2)
where f1 is the fraction of contact area with the solid, and f2 is the
fraction of contact area with the air. As f1 is reduced, the apparent
contact angle will converge to the air–water contact angle of 180�,
corresponding to the superhydrophobic state. While the Wenzel
regime can both enhance hydrophobic and hydrophilic behav-
iour, the Cassie regime always leads to larger contact angles.
While the Cassie equation, eqn (2), should hold for very rough
and/or very hydrophobic surfaces, the air-pockets may not be
stable for slightly or moderately hydrophobic materials despite
a large surface roughness. This suggests an intermediate phase
where both wetting conditions co-exist. Such complex wetting
behaviour was observed by slow condensation and evaporation
on lotus leaves, where Cheng et al.19 noted that lotus leaves in
certain conditions could be wetted despite having high apparent
contact angles corresponding to a superhydrophobic state.
Consider the artificially nanostructured surfaces, carbon nano-
tube forests (CNTF) and the morphologically similar silicon
nanograss (SiNG); wetting of carbon nanotube forests has been
a topic of interest for some time and Li et al.20 and Lau et al.21
reported pronounced hydrophobicity and even superhydropho-
bicity (contact angle larger than 150�) on such surfaces. Vertically
aligned carbon nanotubes exhibit highly hydrophobic behaviour,
Soft Matter, 2008, 4, 392–399 | 393

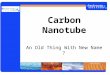
Fig. 1 SEM images of SiNG (A,C) and of CNTF (C,D). Note that the
overall dimensions of the SiNG structures are roughly 5 times larger,
both in terms of separation, diameter and length. (E) After dispersion
on SiNG, the drop of water containing microbeads forms a nearly-round
droplet that slowly shrinks by evaporation, pulling nearly all microbeads
into a closed-packed sphere. The inset is a magnified view of the surface
of the microbead agglomerate. (F) Image showing scattered latex
microbeads dispersed on a CNTF surface, near the edge of the round
droplet area.
Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
which is pronounced further when covered with a hydrophobic
coating such as Teflon.21 The structures appear to amplify either
the hydrophobicity or the hydrophilicity: Fan et al.22 found that
as-grown Si nanorods have a strongly enhanced hydrophilicity
compared to a flat Si surface, while H-passivation (hydrofluoric
acid treatment) likewise enhanced the hydrophobicity, reaching
an equilibrium contact angle of 142.7�.
In the present work, an anisotropically etched Silicon nano-
grass (SiNG) surface showed superhydrophobic behaviour
(154–170�) during slow evaporation and no contact-line pinning.
In contrast, the CNTF substrate showed strong contact-line
pinning, with the contact angle decreasing from 125� to zero
during evaporation. This indicates a transition from the Cassie
to the Wenzel state as observed in ref. 16. Whereas manipulation
and removal of latex microbeads is straightforward for both
surfaces, dispersion of particles is far more effective on CNTF
than on the investigated SiNG surfaces, as a consequence of
the mixed wetting behaviour of the CNTF.
2 Wetting of nanostructured and smooth surfaces
2.1 Sample preparation
The wetting properties of four different substrates were investi-
gated: silicon dioxide (SiO2), Teflon, silicon nanograss (SiNG)
and vertically aligned carbon nanotube forests (CNTF). The
SiO2 surface was prepared by thermal oxidation. The ‘‘Teflon’’
substrate was made by deposition of an 80 nm Teflon-like
coating from a C4F8 plasma onto a silicon wafer.23 The SiNG
was fabricated by anisotropic etching of a silicon wafer in a
SF6–O2 99 : 90 sccm mixture for 5 minutes, followed by isotropic
etching (SF6–O2 260 : 26 sccm) and passivation (C4F8 120 sccm)
cycles for 3 minutes with the wafers kept at �10 �C. The CNTF
were prepared in a plasma-enhanced chemical vapour deposition
system (PECVD).24–26 Transmission electron microscopy images
of individual CNTs grown with the same PECVD process
parameters,33 revealed that the structures are well-graphitized
multi-walled carbon nanotubes, often capped with a thin layer
of amorphous carbon. The presence of such an amorphous
carbon layer depends on the detailed growth process.33
Fig. 3A and 3B show that the aspect ratio and overall
morphology of the SiNG compares to the CNTF except for a
scaling of roughly 5. The SiNG are up to 10 mm in length with
a width ranging from 0.3 to 1 mm at the base, decreasing towards
their apex to 0.1–0.2 mmat the top. The typical separation of indi-
vidual SiNG protrusions is around 1–1.5 mm. The CNTs are 2 mm
tall with a more cylindrical shape, and a diameter around 50–120
nm. The average separation of CNTs is 0.2–0.4 mm. Thus, the
roughness parameter r and the fraction of area to the solid, f1, as
encountered in eqn (1) and eqn (2), are in the same range. Due to
the aspect ratio not exceeding 20 and rather large separations,
neither theCNTFor theSiNGstructureswereobserved to collapse
due to surface tension, as reported for multi-walled carbon nano-
tubes in ref. 27. A surface view of the typical morphology of the
SiNGand theCNTF is shown inFig. 3CandFig. 3D, respectively.
2.2 Development of contact angle during slow evaporation
The evolution of the contact angle and baseline with time for
mL-sized water droplets deposited on SiO2, SiNG, Teflon and
394 | Soft Matter, 2008, 4, 392–399
a CNTF samples was studied using an optical microscope and
a Kruss drop shape analysis system DSA10 Mh2. The baseline
is the diameter of the droplet–surface interface. A computer-
controlled syringe was used to deposit small water droplets on
the surface. In the following we compare the wetting properties
of carbon nanotube forests and silicon nanograss, to a hydro-
phobic surface, Teflon, and a hydrophilic surface, SiO2 during
slow evaporation, which is the scenario most relevant for a liquid
dispersion of nanostructures. The optical microscope pictures in
Fig. 1 shows the shape of the water droplets after 0, 5, 10 and 15
minutes after initial deposition on the SiNG, CNTF, Teflon and
SiO2 surfaces.
On the SiNG surface the initial contact angle is 154�, and as
the droplet evaporates, it increases gradually to 170�, which is
a signature of superhydrophobic behaviour. Two droplets,
slightly different in volume, were deposited on the CNTF, as
shown in a series of photographs in Fig. 1. For the left-most
droplet, the contact angle is initially 125�, corresponding to
strong hydrophobicity. In this case, however, the baseline
remains nearly constant while the contact angle is reduced
strongly. This behavior is characteristic of a superhydrophobic
surface with strong contact-line pinning.15,28
This journal is ª The Royal Society of Chemistry 2008

Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
For smooth surfaces where the contact lines move almost
freely, the advancing angle is only slightly larger than the receding
contact angle. On the Teflon surface, it is seen that the receding
contact angle remains close to the initial 105� during the evapora-
tion process. The loss of liquid is accommodated by a reduction
of the baseline, rather than decreasing of the contact angle. On
the SiO2 surface, the initial contact angle is less than 20�,
dropping towards the measurement limit over the 15 minutes.
In Fig. 1B and Fig. 1C the contact angle and baseline as a func-
tion of time are plotted for the four surfaces. The SiNG and
Teflon both exhibit nearly constant contact angles, where the
contact angle of SiNG even increases slightly with evaporation.
Three droplets are plotted for the CNTF: two large size droplets
with an initial baseline around 1 mm, and one small size droplet
with initial baseline around 0.25 mm. All three droplets show
a decreasing contact angle, similar to the SiO2 film. While the
small droplet experience a decline in the baseline after 10 minutes
due to final evaporation of the thin water film, the baseline of the
larger droplets hardly changes during the 15 minutes. Although
water on CNTF initially shows a higher contact angle than on
Teflon, it behaves almost exactly like on SiO2 during evapora-
tion, in that the baseline stays constant and the contact angle
decreases. These results show that the wetting of the CNTF is
much easier than of the SiNG samples investigated here.
Fig. 2 A) Optical microscope image showing the shape of water droplet
upon gradual evaporation after 0, 5 and 10 min of deposition on SiNG,
CNTF, Teflon and SiO2, B) contact angle in degrees, and C) baseline
(diameter of surface–droplet interface) plotted against variation with
evaporation for SiNG, CNTF, Teflon and SiO2.
2.2 Development of individual microdroplets during
condensation
The detailed behaviour of water droplets during condensation
and evaporation can be monitored with environmental scanning
electron microscopy (ESEM), offering a higher resolution than
optical microscopy. The condensation of water on the substrate
inside a FEI XL-30 environmental SEM was controlled by care-
fully regulating the temperature of the substrate with a Peltier
element, as well as the total vapour pressure inside the ESEM
chamber. Condensation of water inside the ESEM was initiated
by lowering the temperature carefully and increasing the water
vapour pressure to around 5 mbar.
In Fig. 2 a series of ESEM pictures shows condensation on the
CNTF. The condensation is initiated at 5.3 mbar and 2.9 �C with
the sudden appearance of spherical microdroplets randomly
distributed over the substrate surface, see Fig. 2A. During
condensation, existing droplets accumulate water vapor and
grow in size, while new droplets are continuously nucleated.
The equilibrium between condensation and evaporation is very
sensitive to small changes in substrate temperature and water
vapor pressure. Roughly 30 seconds later, more water has
condensed, Fig. 2B, causing smaller water droplets to merge as
their surfaces touch. The three smaller droplets in Fig. 2A have
merged into one large droplet in Fig. 2B, which has a more irreg-
ular shape. In Fig. 2B the droplets appear to be pinned at the
previous droplet centers. After further condensation a large
droplet has formed, still pinned at arrow 1, Fig. 2C. Arrow 2
points to an area between two droplets in Fig. 2A and 2B, where
the surface still appears to be hydrophobic. Fig. 2D–E illustrates
merging of two such droplets, where the new droplet is pinned at
the two previous droplet centers. In Fig. 2F the surface shows
mixed hydrophobic-like and hydrophilic-like regions for all
larger droplets. The distinct change of the droplet morphology
This journal is ª The Royal Society of Chemistry 2008
indicates that the droplets experience a transition from the
Cassie state to the Wenzel state from Fig. 2A–F. The condensa-
tion behavior was similar after subsequent drying and re-conden-
sation, indicating that the surface does not change permanently
due to the wetting, which for instance can occur if capillary
forces induce bundling of the CNT. Also, no sign of such
bundling or collapsing was observed in SEM after condensation.
3. Dispersion and manipulation of latex microbeads
Latex microbeads were dispersed on a number of different
substrates: Au, Si, SiO2, Teflon, diamond-like carbon (DLC),
SiNG and CNTF. The SiO2 and Teflon surfaces were prepared
as described in the previous section. The Au and Si substrates
were prepared as described in ref. 13. The diamond-like carbon
substrate was made by depositing a 70 nm DLC film onto a clean
silicon wafer using an S-bend filtered cathodic vacuum arc
system.29
Soft Matter, 2008, 4, 392–399 | 395

Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
An aqueous solution of 5 mm or 20 mm diameter latex microbe-
ads (Polysciences Inc.) was deposited on SiNG and CNTF
samples in 5–20 mL droplets using a micropipette. The solvent
was evaporated by a low-power heating for 20 minutes. For
the smooth surfaces (Au, Si, SiO2, Teflon, DLC), the trend was
that the microbeads were more evenly dispersed on the high-
energy surfaces (Au, Si, SiO2), while they clustered in agglomer-
ates of up to hundreds of latex beads on the low-energy surfaces
(Teflon, DLC).
On both CNTF and SiNG surfaces, individual latex beads were
found scattered after evaporation. On SiNG, however, the vast
majority of latex beads remaining in the droplet, which either
rolled off the surface and thereby removed the latex beads, or left
a spherical agglomerate of latex beads after evaporation.Remark-
ably, a dense solution led to mm-sized spherical agglomerates
consisting of millions of latex microbeads, as shown in Fig. 3E.
The inset shows closed-packed domains of the microbeads at
the surface of the spherical agglomerate. Even in this case, very
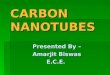
Fig. 3 Environmental scanning electron microscope images of water
droplets on CNTF. A) Condensation of water starts with the appearance
of small spherical micro-droplets. B) Smaller droplets merge into larger
ones, exhibiting pinning at the previous droplet centres. C) After further
condensation a large droplet has been formed, yet still pinned at location
1 (see arrow). (D–E) Sketch illustrating two droplets merging. After
merging (E) the new droplet is pinned at the two previous droplet centres.
(F) In the mixed wetting state many droplets start to have both hydro-
phobic and hydrophilic-like regions. (G) After further condensation the
surface becomes dominated by hydrophilic-like regions (Wenzel regime).
396 | Soft Matter, 2008, 4, 392–399
few latex beads were deposited elsewhere on the surface. For the
CNTF, individual and small clusters ofmicrobeadswere scattered
more evenly across the surface with a tendency of clustering only
near the edges of the droplet area, see Fig. 3F.
The manipulation setup consists of a Klocke Nanotechnik
xyz-stage mounted inside the LEO 1550 SEM chamber, which is
operated by an external computer, and has a resolution of about
10 nm. Using cantilevers with spring constants in the 0.1–10 N
m�1 regime and following the strategy outlined in ref. 13, it was
attempted to release and manipulate latex beads from their initial
position after dispersion and evaporation onto different surfaces:
Au, Si, SiO2, Teflon, DLC, CNTF and SiNG.
On the smooth Au, Si and SiO2 surfaces it was not possible to
release latex beads from their initial position at all, as observed in
ref. 13. On Teflon, it was possible to tear off latex beads,
however, only with a significant bending of the microcantile-
vers.13 On the DLC, SiNG and CNTF surfaces the latex beads
could be pushed on the surface with ease after initial release.
On CNTF, after the initial release of 5–20 mm latex beads, very
little bending of even the softest cantilevers (spring constant 0.1
N m�1) was observed. Fig. 4 shows a group of four 20 mm latex
beads being pushed on the nanotube forest. Here the beads are
sliding and rotating smoothly on the surface Fig. 4A–B, after
which the cluster jumps to a new position, see Fig. 4C. Subse-
quent re-approach allowed further rotation, Fig. 4D. On SiNG
it was likewise possible to push, pull and remove microbeads,
however typically with a more irregular motion pattern, most
likely due to the larger spacing between the protrusions. In
Fig. 5, three latex beads are dragged across a surface by the adhe-
sion force between the cantilever and one bead. During this
process, one of the beads is pinned by an irregularity on the
Fig. 4 SEM images of a micro-cantilever with spring constant 0.1 N m�1
pushing latex beads along a CNTF surface. (A) A cluster of four 20 mm
beads is approached. (B) By pushing it is possible to rotate the cluster.
(C) The cluster jumps away. (D) Re-approach allowed further rotation
of the cluster. The scale bar represents 40 mm.
This journal is ª The Royal Society of Chemistry 2008

Fig. 5 The series of SEM images shows three 5 mm latex beads being
pulled across a SiNG surface. The small circle (see arrow) marks
a mechanical pinning point on the SiNG surface, which causes the three
beads to rotate during the translation.
Fig. 6 SEM images of STM tipmanipulating (A–B) Bi nanowires, (C–D)
multi-walled CNT, and (E–F) para-hexaphenylene (p-6P) nanowires.
Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
surface, causing the cluster to rotate, as shown by the small mark
in Fig. 5A–F. On DLC, the initial stiction was substantially
higher than the dynamical stiction; release of the latex beads
right after dispersion was much more difficult. Once released,
the motion was nearly as smooth as on CNTF.
We have used the CNTF for manipulation of various nano-
structures of different size and material. In Fig. 6, three examples
are shown. The manipulation setup is similar to that described
above, only in this case the microcantilever is replaced by a sharp
tungsten tip.13 In Fig. 6A–B a bismuth nanowire with a diameter
of 400 nm is being lifted up from the surface, for subsequent
transfer to an electronic characterisation device. In Fig. 6C–D
we show that even multi-walled carbon nanotubes of submicron
length can be lifted up and deposited in a new position. In
Fig. 6E–F the STM tip is being pushed under a 200 nm wide,
50 nm high para-hexaphenylene nanowire, which is then gently
let down again onto the surface.
4. Discussion
The contact angle observed during evaporation of water on the
SiNG reached 170�, significantly higher than HF-treated silicon
This journal is ª The Royal Society of Chemistry 2008
posts,22 147�, and close to the values obtained with structured
plasma-polymerised heptafluorobutyl acrylate,28 173�, and with
PTFE-coated CNTF.30 In the work by Chen et al.14 absence of
contact-line pinning was observed only for smooth surfaces,
whereas the SiNG investigated here exhibits microscale rough-
ness, in terms of average distance between SiNG protrusions.
All clean silicon surfaces exposed to ambient conditions
develop a natural oxide with a thickness of 1–2 nm, which should
render the surface hydrophilic. The superhydrophobic behaviour
of the SiNG can be explained by the formation of thin fluoro-
carbon films originating from the side-wall passivation process
in the deep reactive ion etch.31,32 In this picture, the low surface
energy associated with such a fluorocarbon layer effectively
prevents the water from entering between Si protrusions, thus
allowing the liquid to only interact with the apex of the SiNG.
In such a scenario, roughness-induced contact-angle hysteresis
should be small, as is observed experimentally.
The wetting properties of CNTF are quite in contrast to the
results obtained on SiNG. The apparent contact angle for the
CNTF was significantly lower than for the SiNG, most likely
because the CNTFs were not treated chemically. The contact
angle of a flat graphite sheet is around 85�.34 A water contact
angle of 125� on CNTF indicates that the water is initially in
the Cassie regime, since a lower contact angle should be expected
for a rough surface compared to a flat graphite surface as per
Wenzel theory. As for the Cassie model, the fraction of the
area interacting with water from the CNTF morphology is f1z 0.11. With q ¼ 85� for graphite, the apparent contact angle
should be 152� from eqn (2), which is significantly higher than
the observed contact angle, 125�. In essence, the experimentally
observed contact angle is too high to be explained by the Wenzel
model (complete wetting) and too low to be explained by the
Cassie model. An explanation could be that the thin layer of
amorphous carbon on the CNT leads to a significantly different
Soft Matter, 2008, 4, 392–399 | 397

Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
contact angle and contact-line pinning, as compared to pyrolithic
graphite.
ESEM was used to monitor slowly condensing microdroplets
on CNT, initially having a spherical shape. After development of
multiple pinning points, the contact lines became highly irreg-
ular; eventually what appeared to be a transition to the Wenzel
regime was observed. Co-existence of different wetting states
on various surfaces has been reported by several groups,35–37
while contact-line pinning by micro- and nanoscale protrusions
have been seen for microposts16 and lotus leaves.19 In the work
by Wier and McCarthy16 the wetting of 40 mm-tall silanised
silicon microposts was studied in dry and wet (condensation)
conditions. During condensation, microdroplets formed between
the posts and pinned the contact line, creating irregular drop
shapes qualitatively similar to the ones we showed in Fig. 2.
Compared to Wier and McCarthy16 and Cheng et al.,19 the
average distance between the protrusions for our CNTF is
much smaller than the typical length scale of the droplets, and
the observed contact-line distortions. Also, in ref. 16 the
contact-line hysteresis and reduction of droplet mobility was
observed during condensation, i.e. near the dew point. For the
CNTF investigated here, a strong contact-line pinning was also
observed at room temperature in ambient conditions.
The feasibility of distributing particles homogeneously on
a surface from a liquid dispersion was here related to the wetting
properties of the surface. While water droplets on CNTF wets
the surface effectively, leading to evaporation over a relatively
large area, the superhydrophobic behaviour of SiNG leads to
a ‘‘self-cleaning’’ effect as observed on lotus plant leaves.19
Although a few microbeads were observed on the SiNG surface
after dispersion, the large majority were effectively lost by the
formation of large agglomerates.
Dense vertically aligned carbon nanotube forests facilitates
homogeneous dispersion of micro- and nanoparticles, and
exhibits negligible initial and dynamic stiction with all types of
structures so far dispersed on this type of surface, including latex
microbeads, and organic nanofibres,13 carbon nanotubes and Bi
nanowires, as shown in Fig. 6. In comparison, SiNG also showed
good performance as a substrate for nanomanipulation of
supported particles; latex microbeads were easily manipulated
and removed directly after evaporation of the solvent, with negli-
gible static and dynamic friction. However, the possibility of
dispersion of particles on SiNG is in general hindered due to
the superhydrophobicity and lack of contact-line pinning, which
effectively prevents wetting; the liquid dispersion rolls off the
surface, and thereby removes nearly all the objects to be
dispersed. This is particularly problematic if the objects in
dispersion are not available in a high concentration, in which
case the density of objects remaining on the surface after evapo-
ration can become critically low. In comparison, the flat DLC
surface behaved almost as well as the CNT film after initial
release. The initial release is however a critically important
step. The ability to remove nanoparticles with minimal force is
essential for successful manipulation of fragile and small nano-
structures, and absence of initial stiction is greatly preferred.
Still, DLC may be a convenient alternative to carbon nanotube
forests for some applications. In relation to manipulation of
nanostructures, only elongated nanostructures like wires, rods
and tubes can be supported by the SiNG samples presented in
398 | Soft Matter, 2008, 4, 392–399
this work, since the large separation between the protrusions is
likely to cause trapping of nanoparticles, which are small in all
three dimensions. Present efforts concentrate on development
of SiNG-based surfaces with similar structural and wetting prop-
erties as the CNTF, since such SiNG structures are likely to be
easier to fabricate than CNTF. This will make a more direct
comparison of the two types of nanosurfaces possible, in relation
to wetting and nanomanipulation.
Future perspectives include particle systems that are locked to
the 2D plane of the surface but effectively detached from any
lateral forces imposed by the underlying solid substrate. This
could enable self-assembly of objects that have not previously
been possible to work with in dry conditions. The nanorough-
ness of the surfaces also adds a new dimension to controlling
object–surface interactions. It was recently shown that bone-cell
growth is strongly affected by an underlying carbon nanotube
surface.38 Vertically aligned carbon nanotube forests present
some intriguing opportunities for the study of interactions,
motility and growth of living organisms, besides offering a perfect
tool for nanomanipulation of fragile nanostructures.
Acknowledgements
We acknowledge important help and assistance from, and valu-
able discussions with, Andy Horsewell, Kristian Mølhave and
Klaus Bo Mogensen. The Bi nanowires were kindly provided
by Thomas Cornelius. The work was partly supported by EU
grants NANOHAND (IP 034274) and NANORAC (STREP
013680).
References
1 B. Bourlon, D. C. Glattli, B. Placais, J. M. Berroir, C. Miko, L. Forroand A. Bachtold, Phys. Rev. Lett., 2004, 92, 026804/026801–026804.
2 B. Bourlon, C. Miko, L. Forro, D. C. Glattli and A. Bachtold, Phys.Rev. Lett., 2004, 93, 176806–176801–176806–176804.
3 K. Molhave, S. B. Gudnason, A. T. Pedersen, C. H. Clausen,A. Horsewell and P. Boggild, Nano Lett., 2006, 6, 1663–1668.
4 P. Avouris, R. Martel and H. R. Shea, Appl. Surf. Sci., 1999, 141,201–209.
5 K. Molhave, T. M. Hansen, D. N. Madsen and P. Boggild,J. Nanosci. Nanotechnol., 2004, 4, 279–282.
6 K. Molhave, T. Wich, A. Kortschack and P. Boggild,Nanotechnology, 2006, 17, 2434–2441.
7 P. Kim and C. M. Lieber, Science, 1999, 286, 2148–2150.8 Y. X. Zhuang and A. Menon, Tribol. Lett., 2005, 19, 111–117.9 J. Kjelstrup-Hansen, O. Hansen, H.-G. Rubahn and P. Bøggild,
Small, 2006, 2, 660.10 Y. Nakayama and S. Akita, New J. Phys., 2003, 5, –.11 K. Molhave, T. M. Hansen, D. N. Madsen and P. Bøggild,
J. Nanosci. Nanotechnol., 2004, 4, 279–282.12 K. Komvopoulos, Wear, 1996, 200, 305–327.13 K. Gjerde, J. Kjelstrup-Hansen, C. H. Claussen, K. K. B. Teo,
W. I. Milne, H.-G. Rubahn and P. Bøggild, Nanotechnology, 2006,17, 4917–4922.
14 W. Chen, A. Y. Fadeev, M. C. Hsieh, D. Oner, J. Youngblood andT. J. McCarthy, Langmuir, 1999, 15, 3395–3399.
15 V. De Jonghe and D. Chatain, in First European Symposium. Fluids inSpace (ESA SP-353), ESA, Editon edn, 1992, pp. 525–532.
16 K. A. Wier and T. J. McCarthy, Langmuir, 2006, 22, 2433–2436.17 R. N. Wenzel, Ind. Eng. Chem., 1936, 28, 988.18 A. Cassie and S. Baxter, Trans. Faraday Soc., 1944, 40, 546.19 Y. T. Cheng, D. E. Rodak, A. Angelopoulos and T. Gacek, Appl.
Phys. Lett., 2005, 87.20 H. Li, X. Wang, Y. Song, Y. Liu, Q. Li, L. Jiang and D. Shu, Angew.
Chem., Int. Ed., 2001, 40, 1743–1745.
This journal is ª The Royal Society of Chemistry 2008

Publ
ishe
d on
16
Janu
ary
2008
. Dow
nloa
ded
by U
nive
rsity
of
Cal
ifor
nia
- Ir
vine
on
31/1
0/20
14 0
8:12
:10.
View Article Online
21 K. K. S. Lau, J. Bico, K. B. K. Teo, M. Chhowalla,G. A. J. Amaratunga, W. I. Milne, G. H. McKinley andK. K. Gleason, Nano Lett., 2003, 3, 1701–1705.
22 J. G. Fan, X. J. Tang and Y. P. Zhao, Nanotechnology, 2004, 15,501–504.
23 D. Nilson, ‘‘Polymer Based Minituarized Dye Lasers for lab-on-a-chip-systems, PhD Thesis, Technical University of Denmark, 2005.
24 Z. F. Ren, Z. P. Huang, J. W. Xu, J. H. Wang, P. Bush, M. P. Siegaland P. N. Provencio, Science, 1998, 282, 1105–1107.
25 A. Melechko, V. Merkulov, T. McKnight, M. Guillorn, K. Klein,D. Lowndes and M. Simpson, J. Appl. Phys., 2005, 97, 041301–041339.
26 K. B. K. Teo, C. Singh, M. Chhowalla and W. I. Milne, Encycl.Nanosci. Nanotechnol., 2004, 1, 665–686.
27 N. Chakrapani, B. Q. Wei, A. Carrillo, P. M. Ajayan and R. S. Kane,Proc. Natl. Acad. Sci. U. S. A., 2004, 101, 4009–4012.
28 W. Chen, A. Y. Fadeev, M. C. Hsieh, J. Youngblood andT. J. McCarthy, Langmuir, 1999, 15, 3395–3399.
29 K. J. Clay, S. P. Speakman, N. A. Morrison, N. Tomozeiu,W. I. Milne and A. Kapoor, Diamond Relat. Mater., 1998, 7, 1100.
This journal is ª The Royal Society of Chemistry 2008
30 K. K. S. Lau, J. Bico, K. B. K. Teo, M. Chhowalla,G. A. J. Amaratunga, W. I. Milne, G. H. McKinley andK. K. Gleason, Nano Lett., 2003, 3, 1701–1705.
31 K. S. Chen, A. A. Ayon, X. Zhang and S. M. Spearing,J. Microelectromech. Syst., 2002, 11, 264–275.
32 H. Jansen, M. Deboer, R. Legtenberg and M. Elwenspoek,J. Micromech. Microeng., 1995, 5, 115–120.
33 K. B. K. Teo, M. Chhowalla, G. A. J. Amaratunga, W. I. Milne,D. G. Hasko, G. Pirio, P. Legagneux, F. Wyczisk and D. Pribat,Appl. Phys. Lett., 2001, 79, 1534–1536.
34 I. Morcos, J. Chem. Phys., 1972, 57, 1801–&.35 I. Woodward, W. C. E. Schofield, V. Roucoules and J. P. S. Badyal,
Langmuir, 2003, 19, 3432–3438.36 D. O. H. Teare, C. G. Spanos, P. Ridley, E. J. Kinmond,
V. Roucoules, J. P. S. Badyal, S. A. Brewer, S. Coulson andC. Willis, Chem. Mater., 2002, 14, 4566–4571.
37 M. Morra, E. Occhiello and F. Garbassi, J. Colloid Interface Sci.,1989, 132, 504–508.
38 L. P. Zanello, B. Zhao, H. Hu and R. C. Haddon, Nano Lett., 2006, 6,562–567.
Soft Matter, 2008, 4, 392–399 | 399









![[49] Single-Molecule DNA Nanomanipulation: Detection of](https://img.pdfslide.us/doc/110x75/617358589073e71ea24d792e/49-single-molecule-dna-nanomanipulation-detection-of-.jpg)