-
Computer methods in applied
mechanics sand engineering
EI+~;EVIER Comput. Methods Appl+ Mcch. Engrg. 134 (199(~)
197-222
On the stability of symplectic and energy-momentum algorithms
for non-linear Hamiltonian systems with symmetry ~
* 1 O . G o n z a l e z ' , J . C . S i m o
Division of Applied Mechanics. Department of Mechanical
Engineering. StanJord University. Stanford, CA 94305. USA
Received 28 March It)94: revised 5 May 1995
Abstract
This paper presents a detailed comparison of two implicit time
integration schemes for a simple non-linear Hamiltonian system with
symmetry: the motion of a particle in a central force field. The
goal is to cstablisb analytical and numerical results pertaining to
the stability properties of the implicit mid-point rule (the
proto-typical implicit symplectic method) and a particular
energy-momentum conserving scheme, and to compare the two schemes
with respect to accuracy. While all results presented herein are
withm the context of a simple model problem, the problem was
constructed so as to exhibit key features typical of more complex
systems with symmetry such as those arising in non-linear solid
mechanic.;: namely, the presence of large (and relatively slow)
overall motions together with high-frequency internal motions.
Dedicated to the memo O' of Juan Carlos Simo
1. Introduction and motivation
In this pape r we presen t a deta i led compar i son of two
implicit t ime- in tegra t ion s c h e m e s for a s imple non- l
inea r Hami l ton ian sys tem with symmet ry : the mot ion of a
particle in a central force field. T h e m ode l p rob l em is cons
t ruc ted so as to exhibit key fea tures typical o f m o r e
complex sy s t ems with s y m m e t r y such as those arising in
non- l inear solid mechanics ; namely , the p resence o f large
(and relat ively slow) overall mo t ions toge the r with h igh- f
requency internal mot ions . The two s c h e m e s cons ide red are
represen ta t ive o f two basic classes o f implicit a lgor i thms
which are seeming ly ideal for Hami l t on i an sys tems: the
so-called symplect ic in tegrators and the conserv ing (or e n e r
g y - m o m e n t u m ) a lgor i thms .
First in t roduced in the work o f DeVogelare [1] symplect ic in
tegra tors are in tegra t ion a lgor i thms which p rese rve exact
ly the symplect ic charac te r o f a Hami l ton ian flow. Within
the class o f implicit s c h e m e s the classical examp le is the
mid-point rule whose symplect ic charac te r was first no ted in
[2]; in par t icular , t he ent i re G a u s s family of implicit R
u n g e - K u t t a m e t h o d s are symplect ic as no ted i
ndependen t l y by Lasagni [3] and Sanz-Serna [4]. Whi le symplect
ic in tegra tors are geometr ical ly appea l ing and have been s h
o w n to p roduce sha rp phase port ra i ts in long- te rm s imula
t ions , see e .g . [5-7] , the re is numer ica l ev idence which
shows that in genera l these a lgor i thms can exper ience stabili
ty p rob l ems for stiff sy s t ems with s y m m e t r y (for ex
amp le s see [8-11[) .
* Corresponding author. :" Research supported by AFOSR under
contract No. 2-DJA-826 with Stanford University. ' Graduate fellow
supported lay the National Science Foundation.
0045-7825/96[$15.00 ~) 1996 Elsevier Science S.A. All rights
reserved PII S0045-7825(96)01009-2
-
O. Gonzalez. J.C. Simo / Comput. Methods AppL Mech. Engrg. 134
(1996) 197-222
As an alternative to (implicit) symplectic integrators we have
the exact energy-momentum conserving algorithms which by design
preserve the constants of motion (for specific examples see [8-16,
23]). This class of algorithms can be put within a general
framework of discrete Hamiltonian systems with symmetry and can be
shown to possess various notions of stability analogous to those of
the underlying problem (see [171).
The goal of this paper is to provide, within the simplest
possible context, analytical results pertaining to the stability
properties of the implicit mid-point rule (the prototypical
implicit symplectic method) and a particular energy-momentum
conserving scheme. For both algorithms we will examine notions of
stability which are independent of integrability and dimension; in
particular, general dynamic stability and relative Lyapunov
stability of relative equilibria.
For the conserving scheme we will consider we can use general
results on discrete Hamiltonian systems with symmetry to show that
the scheme inherits the above notions of stability from the
underlying model problem. However, since these results apply only
to conserving schemes, we cannot use them directly to say anything
about the mid-point rule. Hence, we introduce weaker notions of
stability which can be 'easily' applied to both algorithms
directly. For example, rather than analyze the relative Lyapunov
stability of relative equilibria we introduce the notion of
relative linear stability. This weaker notion can be applied in the
same fashion to both the symplectic mid-point rule and the
conserving scheme and hence will allow us to analytically compare
stability properties of both schemes. (Note that from general
results on discrete Hamiltonian systems with symmetry we know a
priori that the conserving scheme inherits relative equilibria from
the underlying system. At the moment we do not know if this is so
for the symplectic mid-point rule.) We then verify the stability
analysis numerically and end with a numerical comparison of
accuracy.
2. The model problem
Consider a single particle of mass m > 0 in R 3 moving about
a fixed center of force which will be taken as tbe origin of an
inertial coordinate system and denote the position of the particle
by q ~ •3. We restrict ourselves to conservative central forces
with potential U : R 3--* R where the potential is by necessity a
function of the radial distance Iql only, i.e. U ( q ) = V(]ql)
where V: R+-- ,R. (Here, ]. ] denotes the standard Euclidean norm
on R3.) For any motion of the system t ~ - * q ( t ) ~ R 3 Newton's
second law requires
• , v ' ( lql) mij = -vUI , q) = - ~ q . (2.1)
R E M A R K S 2.1.
(1) For celestial mechanics applications an identical equation
governs the dynamics of the classical two-body problem after
reduction to the center of mass [18]. In this case m is interpreted
as the reduced mass and q as the relative position vector defined
for the two-body system as
m = m~rn~l(m~ + m , ) , (2.2)
q = q2 - qt -
The system in (2. i) ceduees to the well-known Kepler problem
when the potential is of the form V(iql) = - k / l q ! for some
real number k > 0 .
(2) To model situations arising in solid mechanics we consider
the potential V to be that of a stiff (non-linear) spring with free
length A 0. That is, V'(,~o)= 0 and V" large and positive in a
neighborhood of A 0. For example, V(A)= ½k(a z - A~) 2 for some
constant k > 0.
3 . H a m i l t o n i a n f o r m u l a t i o n a n d c o n s e
r v a t i o n l a w s
Define the momenta of the particle by the expression p = m q and
consider rewriting (2.1) in first-order form on a phase space P --
R a x R 3 --'- R 6 as
-
O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 199
= m - l p , (3.1)
v'tlql) P ~ q.
Let z=(qT , p l ) T E P . Then, (3.1) defines a Hamiltonian
system on P as follows (see [19] for an explanation of the
terminology and notation used below). Define the Hamiltonian
function H : P-->R by
H(z) = ~ IPl" + V(Iql), (3.2)
and consider the standard two-form .O : TP x TP-~ ~ given by the
expression
for all z E P and fiz, E T=P~I~" (a = 1,2). In view of (3.2) and
(3.3) we conclude that Eqs. (3.1) for the motion t~--~z(t)~ P can
be written in Hamiltonian form as
:~ = JVH(z). (3.4)
Consider now the (symplectic) action of the rotation group G =
SO(3) on P defined by
q~(A, ( q, p)) = (Aq, A - rp) (3.5)
= (Aq, Ap) ,
where A E G . Since H is invariant under '/~ we have a
Hamiltonian system with symmetry. Furthermore, the action ~
possesses a momentum map J: P---> T*~G ~ ~3 given by J(q, p ) =
q x p which is called the angular momentum for the system. Given
this structure the dynamics described by Hamilton's equations (3.1)
or (3.4) give rise to a flow on the phase space P with the
following properties.
(1) Conservation of energy. The Hamiltonian (i.e. the total
energy of the system) is conserved along solutions t ~ z ( t )E P
of Hamilton's equations, i.e.
d - ~ n(z(t)) = 0. (3.6)
(2) Conservation o f total angular momentum. The angular
momentum map J : P---~ R 3 defined by J(z) = q × p is conserved
along solutions t~--~z(t) E P, i.e.
d -dr J(z(t)) = O. (3.7)
(3) Symplectic character o f Hamiltonian flow. For any z. E P
the local flow F generated by (3.4) is a symplectic map on (P,/2)
for each t for which it is defined. In particular, for each z, E P
there is a neighborhood U of zo and an interval 1 in E containing
the origin and a map F : U x I---~P which is locally a flow for the
Hamiitonian system of ordinary differential equations. That is, for
any z ~ U the curve defined by ~p(t)= F(z, t )= F,(Z) is a solution
with initial condition ~,(0)= z. For each t E 1 the mapping F,:
U--* P is symplectic in the sense that
D.FT, j D ~ F , = J , VzEU, (3.8)
where D=F, is the derivative of F, at z E U (for more details
see [19]).
R E M A R K 3.1. Integrators for which the symplectic condition
(3.8) is satisfied by the algorithmic flow D:a, are called
symplectic integrators. Within the class of implicit Runge-Kutta
methods, the so-called Gauss family satisfy this condition (see
e.g. [3, 4]). The best known example is the implicit mid-point rule
121.
-
200 O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engr8.
134 (1996) 197-222
4. Notions of stability
For Hamiltonian systems with symmetry we consider two basic
notions of stability which are independent of integrability and
dimension: general dynamic stability and relative Lyapunov
stability of relative equilibria. The first deals with boundedness
of solutions uniformly in time and the second with the behavior of
solutions beginning in a neighborhood of a relative equilibrium
solution (i.e. an invariant set).
4.1. General dynamic stability
Recall that a solution (q(t), p(t)) of (3.4) with initial
condition (qo, P,J) is said to be dynamically stable if there is a
constant K > 0 such that [l(q(t), p(t))ll 0. (Here, [[. II
denotes the standard Euclidean norm on P.) We now investigate the
~yna_m.jc stability of solutions to (3.4) for two classes of
potentials:
(1) Non-linear spring potential. The potential V : R + --~ R is
of the form I/(A) = ½ k(A ~" - ~ 0) 2 for some constants k > 0
and A 0 > 0. Note that V(A) >~ 0 for all A E R+ and V(A)---~
00 as A--~ oc. To assess dynamic stability note that a solution
(q(t), p(t)), while it exists, remains in a level set H-~(c) C P w
h e r e c t> 0 is determined by the initial condition, i.¢. H(q
o, Po) = c. Now, while a solution exists we have
1 H( q(t), p(t)) = ~ m-'lp(t)l 2 + v(Iq(t)l) = c . (4.1)
So
v([q(t)D 0 such that ]l(q(t),/gt))ll ~0.
Clearly, any energy-momentum conserving approximation scheme
(which conserves the reduced
-
O. Gonzalez, J.C. Simo ,' Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 2 0 1
Hamiltonian) inherits this notion of stability from the
underlying system. It is not clear, however, that similar
infinite-time results (independent of the time step) can be deduced
for the mid-point rule on a six-dimensional phase space.
4.2. Relative equilibria, reduction and relative stability
Given the Hamiltonian .ystem with symmetry (P, fL G, H) with
momentum map J: P--* T*G recall that a relative equilibrium with
momentum p is a point (q~,p~)~J- t (/.t) c P wtth" the property
that the solution through it satisfies
(q(t), p(t)) = ¢,(exp[t~ l, (q~, Pe)) (4.7)
= (exp[t~]q e, exp[t~]p~),
for some ~ E T.G = so(3) where exp[.] is the matrix exponential
and so(3) denotes the set of real 3 x 3 skew-symmetric matrices. In
particular, a relative equilibrium point (q~, p , ) E J - I ( I Q C
P may be characterized as a critical point of the Hamiltonian H
restricted to the level set j - l ( / ~ ) (s¢¢ e.g, [20-22]).
Regarding Lyapunov stability for the relative equilibrium point,
the most that we can say is with respect to the set
[(q., Pe)] = {(q, P) E P] (q, p) = ~(A, (q,, p.)), A E G.} C J -
~ ( D ) , (4.8)
where G~, is the subgroup of G under which the level set J - l (
/ t ) is invariant (i.e. ~g: P---~ P leaves this set invariant for
all g E G~). In particular, Lyapunov stability for the set [(q¢,
pC)] within the momentum level set, which is defined as relative
Lyapunov stability for the point (q., p.), may be defined using the
notions of reduction and reduced systems. Briefly, given a regular
value /~ for J we can restrict the original Hamiltonian system to
the level set J-~(/~) and then 'factor out' those group motions
that leave
~ ~ ~
this level set invariant. The result is a Hamiltonian system (P,
~Q, H) which is called the reduced system. By design, the set [(q.,
p.)] in j - I ( # ) C P corresponds to a critical point ~'. E/~
=J-~(p ) /G~ of the reduced system and we say that the set [(q.,
p.)] is stable within J - l ( /~ ) if the critical point of the
reduced system is stable. That is, a relative equilibrium point
(qe, P.) E P is relatively Lyapunov stable if the associated fixed
point for the reduced system is Lyapunov stable.
By general results for discrete Hamiltonian systems with
symmetry the constructions outlined above carry over to a large
class of conserving approximation schemes such as those considered
herein. Hence, for the conserving scheme we consider, if the
underlying system possesses a relatively stable relative
equilibrium point so does the algorithm. We cannot, however, use
the above constructions to conclude the same for the mid-point
rule. In order to 'compare' stability properties of both
approximation schemes we thus carry out the reduction process in
detail for the underlying problem and introduce a weak¢: notion of
relative stability applicable to both algorithms. Our goal is to
introduce a framework in which to analytically compare the
stability properties of the symplectic mid-point and conserving
algorithms, at least within the context of relative equilibria.
4.2.1. Reduction In this section we review the notion of
reduction for the model problem. The ideas presented are
well-known (see e.g. [18, Chapter 3]) and are outlined below
merely to motivate the procedure for the algorithmic setting.
Let {el,e2,e3} be a fixed orthonormai basis in R 3 and let J ( z
0 ) = t ~ 0 . (The case /s = 0 is degenerate and corresponds to
motion along a straight line through the origin.) Since J is
constant during any motion and by construction q - J = 0 and p . J
= 0, we conclude that q and p remain in a plane F C R 3 where F =
{x E R 3 : x . / z = 0}.
Assume for simplicity that/z is parallel to e 3 and introduce
plane polar coordinates (A, O) E R+ x S I in F. In addition, let
{e, • ~ , e3} be a moving orthonormal frame defined by the
expressions
-
202 O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
e = q~ [ql ,
e3 = ~[V,, (4.9)
e X = e 3 × e ,
and let 0 be defined such that the orientation of e with respect
to the fixed frame is
• =cos(O )e~ + sin(O)e,. (4.10)
From (4.10) and (4.9) we see that {e, e ± } span F and have time
derivatives given by
i = O e ~ , i a = - O e . (4.11)
To obtain the reduced equations of motion we express q, p • r in
the moving frame as
q = Ae, (4.12) p = rre + Tle ± ,
and note immediately that the condition ~ = q x p implies
r/--/z[A. Substituting (4.12) into Hamilton's equations (3.1) gives
the following evolution equations for the reduced variables:
.b = tz /m2t ' , 0 E S ~ ,
= ¢ r / m , A ~ R + , (4.13)
4 r = - V ' ( , ~ ) + t f f / m A ~, ~ r E R .
In the present case the reduced equations have a particularly
simple form. Note that the evolutions for A and ¢r are independent
of O. Once A has been determined as a function of time, Eq. (4.13)t
may be integrated to determine O. (In this case O is said to be a
cyclic or ignorable coordinate.) Hence, the reduced dynamics are
completely characterized by the evolution of a and ,r. We now show
that the reduced equations (4.13)2 3 are Hamiltonian with phase
space/~ = {(A, *r)TE Rz: A E R+ }.
Let ~= (A, It) T E ,6. Then, (4.13)2.3 define a Hamiltonian
system o n / ; as follows. Define the reduced Hamiltonian function
H : P-- , R by
H(z) = ~ m ¢rz + V,(A), (4.14)
where V,(A)= V(A)+p,Z/2mA2 and consider the standard two-form
g]: T/~ x T/~---, R given by the expression
g~a,(~, ,~£z)=M':J~£2 where 3 = [ _ 0 1 ] . (4.15)
In view of (4.14) and (4.15) we conclude that Eqs. (4.13)2.3 for
the motion t ~ - - ~ ( t ) E f i can be written in Hamiltonian form
as
£ = 3 V/~(Z). (4.16)
R E M A R K S 4.1.
(1) Note that the reduction followed from the conservation of
total angular momentum; in particular, the conservation of energy
played no role in the reduction process. This observation is
crucial in the algorithmic setting.
(2) The potential V, in the reduced Hamiltonian is the sum of
the original potential V and the potential of the centrifugal
force. In the mechanics literature, V, is known as the amended
potential and arises in the study of relative equilibria for
Hamiitonian systems with symmetry.
(3) In this case the reduced equations are Hamiitonian relative
to the standard two-form fl on /~ C R z. In the general case,
reduction yields equations which are Hamiltonian relative to a
non-s tandard two-form.
(4) As required by the symplectic reduction theorem [22], the
reduced flow in/5 is a symplectic map
-
O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 203
for each t > 0 relative to the two-form .0 : T/5 x T/5---, R.
In particular, for each t > 0 the reduced flow is an
area-preserving map of/5 into itself.
4.2.2. Relative equilibria and relative linear stability
Consider a fixed point [ * E t5 of the reduced equations (4.16)
which in components are
/t = zr/m , (4.17) ~- = -v~(A).
Clearly, the fixed point must be of the form ~* = (A*, 0) r
where A* is a stationary point of the amended potential V~,.
Inspection of Eqs. (4.11)-(4.13) shows that a fixed point of the
reduced Hamiltonian flow on P corresponds to a steady motion on the
canonical phase space P. This steady solution is a relative
equilibria for the system on P. In terms of the motion of the
particle in ~3, the relative equilibria corresponds to a steady
circular orbit of the particle in the plane F with radius Iql =
A*.
We now introduce the notion of relative linear stability for a
relative equilibria. In particular, we will say that a relative
equilibria is relatively linearly stable if the fixed point of the
reduced equations in/5 is linearly stable, which we define
next.
Let ]~t:/5---~/5 be the t-advance mapping for the solution of
the reduced equations, i.e. ~', = Ft(zo), and note that by
definition the fixed point ~* satisfies ~'* = b~,(~ *) for all
t/> 0. We say that £* is linearly stable if infinitesimal
disturbances 8~'E Te.P on ~'* do not grow in time. To examine the
linear stability of £'* we must consider the derivative D~.F, :
T~./5---~ T~./5. First, note that as in the canonical case the
mapping F, is sympleetic on /5 for each t > 0. Hence, the
condition (3.8) implies
d e t [ D - ~ , ] = l , ' ¢ t > 0 , V [ E / 5 , (4.18)
so that/~, is an area-preserving map of/5 c R 2 into itself. Now
consider an infinitesimal disturbance ~" on the solution [*. The
infinitesimal disturbance satisfies the equation of variations
84, = JV2~(~ *) ~Z',, (4.19)
which may be solved as
~ , = exp[dV2H(~*)t] 8[,, = A, ~z'0. (4.20)
Hence, the evolution of the infinitesimal disturbance ~" is
determined by the one-parameter group of transformations A, =
D~.F,: T~./5---> T~./5. From (4.20) we see that infinitesimal
perturbations of the fixed point :T* remain infinitesimal if the
mapping A, is stable. In view of (4.18) stability of this mapping
requires that the eigenvalues ~'L2(A,) be simple on the unit circle
in the complex plane. Since A, ~ R 2xz we have
' V¼ ~l.2(At) = "~ tr[A,] +- tr2[A,] - 1, (4.21) so that the
eigenvalues are simple on the unit circle if
[1 tr[A,] I < 1 . (4.22)
From the preceding results we conclude that the linear stability
of the fixed point E* = (a*, 0) T ~ /~ (and hence relative linear
stabilitypf the relative equilibria on P) is determined by the
trace of the linearized t-advance mapping A, = Dz.F,.
R E M A R K 4.2. In the present case, linear stability of the
fixed point [* implies that A* is a local minimum of the amended
potential, i.e. V~(A*) > 0. This follows from (4.20) where a
simple calculation gives the eigenvalues of A, as
~m(A,) = exp[ ±i~/V~( A*) / m t] . (4.23)
-
204 O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
It then follows that the condition for linear stability is
equivalent to V~,I(A*) > 0 which implies non-linear stability of
the fixed point (and hence the relative equilibria). This, however,
does not hold for the general case. That is, linear stability does
not generally imply non-linear (Lyapunov) stability. Throughout the
remainder of our analysis we assume that the model problem has a
stable relative equilibria in the sense that V~(A*)>0.
5. Symplectic approximation: Implicit mid-point rule
In the following sections we consider the mid-point algorithm
and address the question of relative linear stability for a
relative equilibria of the discrete dynamics. Beginning with the
mid-point rule formulated on the canonical.phase space P = R 3 × R
3 we will show that the discrete dynamics may be reduced to the
phase space P C R2. We then show that a fixed point exists for the
reduced algorithmic equations and analyze the linear stability of
this fixed point by way of the linearized algorithmic At-advance
mapping. For purposes of comparison, we then formulate the
mid-point rule directly on the reduced space P and perform a
similar analysis.
5.1. Algorithmic approximation on original phase space
Let [0, T] be the time interval of interest and consider the
equations of motion on P given in (3.1) or (3.4) with initial data
z(O)=zo. Given a partition {t,}~= 0 of [0, T] such that t 0=0 , tN=
T, and t,+ i - t n = At >0 , the algorithmic problem is to
compute z.+l from given data z~ E P and generate a solution
sequence (zn)~=0 where zn stands for an algorithmic approximation
to z(t,). The mid-point approximation to (3.4) is
Z.+~ - z . = At JVH(Z.+,,:) , (5.1a)
where (')n+l,2 = ½[('). + (').+1]. In view of (3.1) the explicit
form of (5.1a) is
q.+~ - q . = Atm-~p.+l:2 , V'(lq .... 2[) (5.1b)
P"+'-Pn=-At Iqn+,,2l q . . . . .
R E M A R K 5.1. For the discrete dynamics defined by the
mid-point algorithm (5.1) the 'motion' of the phase point in the
phase space is given by a sequence (zn)~=o in P. In this case we
view the algorithmic solution as being generated by a At-advance
mapping F~,: P---, P such that zn+~ = U:,,(z,). For the mid-point
algorithm this mapping is defined implicitly by an expression of
the form G,,(z, , z ,+~)= O.
5.2. Properties o f the algorithmic flow
The discrete dynamics described by the mid-point algorithm
(5.1a) or (5.1b) give rise to an algorithmic flow on P with the
following properties.
(1) Conservation of total ang,dar momentum. As before, define
the angular momentum map J : P--* R 3 by the expression J ( z )=q x
p. Then, J is preserved along any motion (z~)~o in the sense
that
J(zn+,)=J(z~), ( n = O , l . . . . . N ) . (5.2)
This result follows directly from the algorithmic equations. (2)
Symplectic character o f the algorithmic flow. Consider the
At-advance mapping for the mid-point
algorithm defined by the implicit relation (5.1a). Associated
with this mapping we have the discrete equation of variations
~ . +, = :~,(z~, z~ . , ) ~z . . (5.3)
where ~,(z~, z,,+ ~): T ~ P - ~ Tz~ ÷, P is the linearized
At-advance mapping. A straightforward calculation
-
O. Gonzalez. J.C. Simo I Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 205
shows that l ~ ( z n , z , + t ) satisfies the condition in
(3.8) so that the algorithmic At-advance mapping defined by the
implicit relation (5.1a) is a symplectic map on P with the standard
two-form.
5.3. Reduct ion
Due to the presence of the co~iserved quantity J the discrete
dynamics on P defined by the m'~d-point algorithm (5. la) or (5.
lb) may be reduced to a phase space/3 C R 2. As before, let {e~,
e2, e3) be a fixed or thonormal basis in [~3 and consider a motion
(zn)~=o in P for which J(z0) = /~ ~ 0. Since J is constant along
any motion and by construction q, . J = 0 and pn . J = 0, we
conclude that qn and Pn remain in the plane F = ( x ~ 3 : x - / t
=0} for n = 0 , 1 . . . . . N.
Assume for simplicity that p. is parallel to e 3 and introduce
plane polar coordinates (A, O ) E R . x S I in F. Let (en,e~, e3}
be a moving orth~normal frame defined at each point of the motion
by the expressions
e 3 =/t/~t, (5.4)
e ~ = e 3 × e n .
At each point of the motion let O n be defined such that the
orientation of e~ with respect to the fixed frame is
e, = cos(On)e I + sin(O~)e 2 . (5.5)
From (5.4) we see that {e~, e~ } span F for each n and hence we
can express q~, q, + t E F as
q,, = A~e., (5.6)
qn+t =)in+ten+! "
To simplify the developments that follow it proves convenient to
define a second moving frame {i, ~ ~, e3} which in each time
interval [t~, t~+l] is given by
e n + I "1" e n
-- ]e,,+~ +e,,I '
en+ I - e n
e '± -~ l e n + , - e ~ l " (5 .7 )
e 3 = ~ X ~ ± ----- i t t / ~ .
Let 0 = 0~+~ - On be the angle between the vectors q~+~ and q~,
i.e. the swept angle in the interval [t~, tn+!]. Then using the
basis in (5.7) we have
e~ = cos(0 /2) i - sin(0/2)~ ~ ,
e~+ I = cos(0 /2) i + sin(0/2)~ l (5.8)
which in view of (5.6) gives
q~ = A~ c o s ( O / 2 ) i - A~ s in (O/2 ) i ~ ,
q~ + l = A~ + i cos (0 /2 ) i + A~ + ~ sin(0/2)~ ~ . (5.9)
We now proceed to express p~, p , ~ E F i,I the mov:ng frame
(5.7). As before, at each point in the motion let ¢r~ = p~. e~. By
conservation of angular momentum we have q~ x p~ = / ze 3 and q, +
~ x ,on + ~ = /ze 3. Taking the cross product of these expressions
with q~ and q~+m, respectively, leads to
-
206 o. Gonzalez, J.C. Simo I Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
pn = [¢r n Cos(O/2)+ "~ s i n ( O / 2 ) ] ~ - [ ~'n
sin(O/2)-~-~cos(O/2)i~ L , (5.1o)
p . + , = [¢r.+, cos (0 /2 ) - ~ s i n ( 0 / 2 ) ] i + [¢r.+,
sin(0/2) + A-~-~÷ cos (0 /2 ) ] i ; .
Substituting (5.9) and (5.10) into the mid-point algorithm
(5.1b) yields the following component equations for the reduced
variables ~, ¢r and 0:
_A =Atm_~Fcr~+~,,[ A.+~-A. . -I A.+l + t~ ~ t a n ( 0 / 2 ) ] ,
(5.11)
2An+l/2 ¢r.+~ - or. = -A t OrAn+l/2 + p, ~ tan(0/2),
2A.+,/2 sin(0/2) = A r m - [ ~ (or.+, - lrn) sin(0/2) +/~
--.--n+~. n+ cos(O/2)J, (5.12)
1 A,,+ l - An : 2¢r. + ~,2 sin(O/2) = - ~ At ¢r(A.+ ~ - A.)
sin(O~2) + I~ ~ cos(O, 2) ,
where o.=g'({qn+l/2D/]qa+l,2[. Note that there are four
equations for three unknown reduced variables A.+,, ¢r.+~ and O
(i.e. 0.+1). A simple calculation shows that the dependent
equations are those in (5.12). With the proper substitutions these
two equations become identical. Solving for the quantity (A.+~ - A
. ) in (5.11)1 and substituting the result into (5.12)2 yields
2A,,A,,+~ / 1 2 i "x tan2(0/2) - ~ ~1 +-~-At m- ~r) tan(0/2) + 1
= 0 . (5.13)
Hence. Eqs. (5.12) may be replaced by the single equation
(5.13). The reduced algorithmic equations are then
A.+1-A. =~tm_l[cr .+ ,~2+ A . + , - A . tan(0/2)] ~ ~
2A.+llz
¢rn+ , - ¢r n = -A t crA.+,, z +/z ~ tan(0/2) , (5.14)
: . 2A A m 1AtZm_%r) t a n ( O / 2 ) + l = O . tan ( 0 / 2 ) - ~
(1 +~-
R E M A R K 5.2. The third equation in (5.14) may be taken to
define 0 as an implicit function of A. and A.+I. In principle, we
could eliminate this equation and end up with a system of the form
Ga,(z., z~ + i ) = 0 where ~'~ = (A~, ¢r.)'r E/~. That is, we may
view (5.14) as defining an implicit map of P C R 2 into itself.
According to the symplectic reduction theorem, the At-advance
mapping for the reduced algorithm on P is symplectic given that the
algorithm on the cmzonical phase space P is symplectic.
5. 4. Stability o f algorithmic relative equilibria
As in ti',e exact case, a fixed point of the reduced algorithmic
equations on/3 corresponds to a steady (discrete) solution of the
algorithmic equations on P. This steady solution is then a discrete
analog of a relative equilibria. Following the model problem we
seek a fixed point i * ~ / 3 of the reduced algorithmic equations
(5.14). In the algorithmic case, i* is a fixed point if there
exists a motion (z.)~=0 such that ~'. = i* (n = 0, 1 . . . . . N).
To this end we have the following
L E M M A 5.1. ~'* = (A*, O) x E/3 is a fired point o f the
reduced algorithmic equation,~ (5.14) i f A* is a stationary point
o f an algorithmic amended potential V,, : R+ ~ R deJined as
-
O. Gonzalez, J.C. Simo I Comput. Methods Appl. Mech. Engrg. 134
(1906~ 107-222 207
I:,(A) = rjiA a(s)V'(s/a(s)) ds + g" /ZmA 2 , (5.15)
where
a ( A ) = V l + 1 2 ~ ~g / r (A , and ,O~(A) = At g/mA"
~ N PROOF. Consider a motion (z.).=0 such that ~ ' .=(A*,0) T
for all n. Setting A.=A,,+ l =A* and zr. = ~r.+ i = 0 in (5.14)1
shows that this equation is satisfied identically. From (5.14) 2 we
get
2/x ~r = ~ tan(O/2), (5.16)
which upon substitution into (5.14)3 yields
a t /~ (5.17) tan(0/2) = 2re(a.) 2 .
In view of (5.17) and (5.16) we see that the reduced algorithmic
equations are satisfied by a motion of the form ~. = (A*, 0) r (n =
0, 1 . . . . . N) if A* satisfies the equation
(5.18) ~r = m(lt*) ' '
where cr=v'(Iq.+n/zl)/{q.+n/2l. For the motion we are
considering we have qn=X*e, and q.÷t = A*e.+ I, and by definition
of 0 we have e . . e . + n =cos(0), Using the definition of qn+n/2
and some trigonometric identities we arrive at
Iq . . . . . I = A* cos(0/2) , (5.19)
which in view of (5.17) and some more trigonometric identities
yields
it* Iq.+,,zl = [ - 1 + 1 / At/z ~2] , :2 . (5.20)
L ~,~-T~-;9/J Substituting (5.20) into (5.18) then shows that ~*
must satisfy
~( ,x*)v ' ( ,x , / , , (a*) ) - m - - ( ' ~ = o . (5.21)
In view of (5.15) A* must be a stationary point of ~', as
claimed. []
Regarding the existence of a zero for the function t2~: ~ +--, R
(and hence the existence of a fixed point for the reduced
algorithm) we have the following
L E M M A 5.2. (i~ = 0 defines A* as an implicit function o f At
in a neighborhood o f At = O.
PROOF. Consider I;'~ as a function of both A and At. Then the
zero level set of 17"~ contains the point (a*, At) = (a*, 0) where
a~ is the stationary point of the exact amended potential V~.
Since
^ l , a^ V~(A,, 0) = V~(A ~*) > 0, the claim follows from the
implicit function theorem. I"1
The above result shows that there is a unique A*, and hence
fixed point (A*, 0) of the reduced algorithm, for each At > 0
sufficiently small. The question arises, however, as to what
happens for a large range of At and how strongly A* depends on At.
To answer these questions we present some numerical results for a
specific potential. In particular, we consider the non-linear
spring potential to be used in our numerical stability experiments
which is of the form
-
208 O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
1.0
0.5
( ~ 0
~.5
-1.0 , , , I , , , , I , , , , I , , , , I , , , , 0 0.5 1.0 1~
2.0 2.5
k
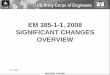
Fig. 1. Plot of ~ venus A (with vertical axis ~aled by I/k) ~r
time ste~ in the inte~al 0 ~ At ~ 2. Note that ~r each time step
there exists a unique zero which de~nds strongly on the time
step.
1 V(A) = ~ k(A 2 - Ao2) 2 . (5.22)
Taking for the 'stiff' case k = 106, a 0 = 1,/~ = 10, and m = 1,
in Fig. 1 we plot V,~ versus A for a wide range of time steps At.
Since zeros of 17'~ correspond to stationary points of I? , the
plot shows that there exits a unique stationary point A* over a
wide range of time steps and that A* depends strongly on the time
step.
In analogy with the model problem, the algorithmic relative
equilibria on P is said to be relatively linearly stable if the
fixed point of the reduced algorithmic equations in P is linearly
stable. To examine the linear stability of the fixed point we
proceed as follows. Invoking the implicit function theorem, the
reduced algorithmic equations (5.14) may be written in the form
GA,(z., z'. +, ) = 0 , (5.23)
where ~'. = (A., *rn)VE/~ C H 2. By definition the fixed point
~*= (A*,0) v satisfies Ga,(~'*,~*)=0. Consider an infinitesimal
disturbance 8~ on the motion ( )n=o. The infinitesimal disturbance
satisfies the discrete equation of variations
8~', +, = Aa,fz' , z") 8~., (5.24)
where ~ , ( z , , z', +t ): T~/;--~ T~÷/~ is the linearized
At-advance mapping. The fixed ~aoint is said to be linearly stable
if the linear mapping &a,(z*, z*) is stable, i.e. if the
eigenvalues ;~l.2(AAt) are simple on the unit circle in the complex
plane. If the At-advance mapping defined implicitly by relation
(5.23) is symplecl,c on f with the standard two-form, then
det[A~,(~'~,~'~+l) ] = 1 along any motion (z~),~0" s and the linear
stability condition for the fixed point becomes
[ 1 tr[~A,(~*, :~*)] [ < 1 . (5.25)
Through a tedious, yet straightforw:~rd application of the chain
rule we linearize (5.14) (considering 0 as an implicit function of
A. and An+t) to obtain the discrete equation of variations.
Particularizing this result for the solution ([*)N= o yields (5.24)
with a linearized At-advance mapping given by
1
where
-
O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 209
1 .O F 1 1 -~.Ov/3( .O~- 3.O~- 8) . = A t m a = l - ~ -~.o~ b -
' ,
( l a ~ ) [ - . o ~ - a ~ l c = A t - l m \ l - - ~ - , ,
-~aF~(a~ 3.O~- 8)] 1 ~ 1 , 1
d = 1 - ~ .OF -- ~" .O, -- -g .OF/3(.O 7 -- 3.O~- -- 8) ,
(5.26b)
1 1 2 0 = 1 +-~.o~ +-g.Od3(.O, -3.O~ - 8 ) .
]3=[.OF( 1 t , 1 , ] / [ ' 1 4 1 ' ' 1 ] , + ~ .O~ + ~ .OT)J /
[~ a , - ~g a ~ ; -
with the sampling frequencies "OF and .or defined as
O r = At ~/m(a*)-",
.O~ = At" m - ' V " ( a * / a ) , = V l 1 +-~a~
For this particular solution one may verify that det[A~,(~*,
~*)] = 1 so that the At-advance mapping defined implicitly by
(5.23) is a symplectic map on P with the standard two-form along
the given motion. (Here, we have used the fact that a mapping of
the plane into itself is sympleetic with respect to the standard
two-form if and only if it is area-preserving.) Regarding the
linear stability of the fixed point (and hence the relative linear
stability of the relative equilibria) we have the following.
L E M M A 5.3. The relative linear siability l imit f o r the
relative equilibria o f the mid-poin t algori thm on P is .OF-~
2.
P R O O F . The result follows by direct verification of
condition (5.25). From (5.26) we get
~, 4 2 + 4 1 ~ 2.OF + 20~-O, 64.O F + 160.O~ + 32.O 2,
(5.27)
"2tr[~a'(Z*'e*)l = 1 3.O~+ 240 r4+ 4.O~-0,2 2 + 64.O~+ 16.O~ +64
"
Considering the 'stiff' case .Or >> .OF > 0 and
retaining the highest-order terms in (5.27) gives
1 ~ , 3 2 + 2.O 4 ~- tr[/~a,(~ , ~*)1 ~ 1- 16 + 4.O~" .Oi large.
(5.28)
In view of (5.28) the stability condition (5.25) is satisfied
for 0 < OF < 2 and violated for O r ~> 2. Hence, for the
'stiff" case we have that "OF ~ 2 is the relative linear stability
limit for the mid-point algorithmic relative equilibria. []
5.5. A lgor i thmic approximat ion on reduced phase space
To contrast the results in the preceding sections which were
obtained by reducing the mid-point approximation on P, we formulate
the mid-point algorithm directly on the reduced space P and address
the question of linear stability for fixed points of this
formulation. The mid-point approximation to the reduced equations
(4.16) is
£,, +, - ~, = At dVH(~, +,,z), (5.29a)
where (').+,/2 =½[( ') . + ( ') .+,]. In view of (4.13)2. 3 the
explicit form of (5.29a) becomes
-i A.+l-A.=Atm ~'.+~/2, (5.29b) "rrn+ , -- lr, = --At
V~(An+,,2).
-
210 O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
By inspection, a motion of the form [ , = (A*, 0) T (n -- 0, 1 .
. . . . N) satisfies (5.29b) where A* = A~* is a stationary point
of the exact amended potential V,,. Hence, :~* = (A*, 0) "r is a
fixed point for the mid-point algorithm on/~ and we see that the
fixed point of the reduced dynamics is exactly preserved.
To examine the linear stability of the algorithmic fixed point
we consider an infinitesimal disturbance 8~" on the motion (z*)~=o-
The infinitesimal disturbance satisfies the discrete equation of
variations
~o+, = ~,~,(~*, ~'*) ~'~, (5.30)
where ~ , ( ~ , , ~ ÷~): T i P - o T~, ~, P is the linearized
At-advance mapping. Linearizing (5.29b) about the solution [*
yields
,~a,(:'."*, i* ) --- -~- ~ ] , (5.31a)
where
| 2 1 , , = 1 - -4 -At m - V,~(A*),
b = A r m -I ,
c = - A t V~(A*), (5.31b)
d = 1 - 1 At 2 m - tI'.~(A*),
1 2 D = 1 +~-At m- 'V~(a*) .
As before, the fixed point is said to be linearly stable if the
mapping A4t(£*, ~'*) is stable. From (5.31) one can verify that
det[An,] = 1 and 1½ tr[/~a,][ < 1 so that the mapping A.,, and
hence the fixed point is unconditionally linearly stable.
6. Conserving approximation
Here, we consider an energy-momentum conserving algorithm and
address the question of the relative linear stability for a
relative equilibria of this algorithmic approximation. We first
outline the construction of a conserving algorithm on P and then
reduce the discrete dynamics to/~ C R 2. We then show that the
reduced algorithm has a fixed point which is exact and analyze its
linear stability. (Note that from general results on discrete
Hamiltonian systems with symmetry [17] we know a priori that the
reduced scheme will inherit exactly the fixed points in the reduced
phase space.) For purposes of comparison we formulate a conserving
algorithm directly on the reduced space P and perform a similar
analysis.
6. I. Algori thm approximation on original phase space
As a point of departure consider the following mid-point
approximation to the equations of motion off P:
q.+t - q. -= At m-~P.+ ~/2 , P.+l - P . = - A t cr(q.,
q.+t)q.+t/2 , (6.1)
_ t , where ~ : R 3 x R---* R is to be determined and as usual
(').+1/2 - ~ [ ( ) . + ( ' ) .+l] . From the results for the
mid-point rule it follows that the above algorithm preserves the
momentum map ] : P - * i~ 3 for any ~ (q~ q~+~)E R. We now proceed
to determine cr such that the Hamiltonian (i.e. "ae total energy)
is conserved along any motion ((q~, P.))~=o generated by (6.1).
Recall, for the system at hand the Hamil~onian H : P---* R is
separable, of the form H ( z ) = K ( p ) + V(]q]) where K ( p ) =
]p]2/2m is the kinetic energy of the particle. In the interval [t.,
t~÷t] the change in kinetic energy is
-
O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 211
1 K(p.÷, ) - K(pD = ~ m - ' ( I p . + , l "~ - Ip . [ - ' )
,
= m-Op. +,,2" (P , . l - P . ) . (6.2)
Substituting the algorithmic equations (6.1) into the above
identity yields
1 K(p.+, ) - K(p.) = - ~ (Iq. +, I - Iq.l~')~r(q., q. +t ).
(6.3)
N The Hamiltonian is said to be conserved along a motion (Z.).=0
if H(z .+I )=H(z . ) for all n. This requires K(p ,+~) - K ( p . )
= -[V([q., ~, [ ) - V(Iq,!) ] which in view of (6.3) is satisfied
by setting
1 V(lq.+, l ) -V(Iqol) o.(q., q.+l) = 1( (6.4)
Iq.+l[ + Iq, I) I q ,+ l l - Iq, I
Hence, the discrete dynamics described by (6.1) together with
(6.4) give rise to an algorithmic flow on P which preserves exactly
the momentum map J and the Hamiltonian H.
R E M A R K S 6.1. (1) Note that cr as given in (6.4) is
well-defined in the limit as Iq, . l l - Iqnl ----}0. In practice,
when
Iq,+,l---I'I.I we compute o- via an expansion of the form
I 1 ( lq.I)) +" ". + - I q . I ) v "Q- ( Iq .+ I I + " ~( lq .+
, l+ lq . i ) c r=V, (_~( lq .+l [ iq. i)) + 2 4 (iq.+ll ~ 1
(6.5)
(2) The approach outlined above for the construction of an exact
energy-momentum preserving algorithm generalizes to more
complicated systems such as non-linear elasticity, shells and rods
(see [8-10]). For the construction of conserving algorithms for
general Hamiltonian systems with more general momentum maps see
[17].
6.2. Reduction
Due to the presence of the conserved quantity J the discrete
dynamics on P defined by the conserving algorithm (6.1) together
with (6.4) may be reduced to a phase space /~ C R 2. Following the
same procedure as before yields the reduced equations
-- An= At m-I['~"+I/2L ~An+l -An "] A.+l + ~ tan(0/2)~, . . 2A
~j:
*r. + 1 - *r~ = -A t era. + i/2 + V - ~ tan(0/2) , (6.6)
2A.A.+~ [ 1 2 i ' - + ~ A t m - t r ] tan(0/2) + 1 = 0 tan2(0/2)
~ ~,1
where tr = A~+~,/2[V(A.+,) - V()t.)l/lA.+ , - )t.].
6.3. Stability o f algorithmic relative equilibria
As before, a fixed point ~*~/5 of the reduced algorithmic
equations corresponds to a relative equilibria for the algorithm on
the original phase space P. Regarding fixed points of the reduced
algorithmic equations we have the following:
L E M M A 6.1. £'* = (A*,0)v• / ; is a fv.ed point o f the
reduced algorithmic equations (6.6) i f A* /s a stationary point o
f the exact amended potential Vu : • + --* R defined as
-
2 1 2 O. Gonzalez, J.C. Sirno / Comput. Methods Appl. Mech.
Engrg. 134 (1996) 197-222
V~,(A) = V(A) +/~2/2mA2. (6.7)
P R O O F . Consider a motion (zn)~o0 such that £n=(A*,0) T for
all n. Setting a,,=~.n÷u =A* and zr n = ~rn+ , = 0 in (6.6), shows
that this equation is satisfied identically. From (6.6) 2 we
get
2/.L a = ~ tan(O/2), (6.8)
which upon substitution into (6.6)3 yields
At/z (6.9) t a n ( 0 / 2 ) - 2re(A.) 2 .
In view of (6.9) and (6.8) we see that the reduced algorithmic
equations are satisfied by a motion of the form zn = (A*, 0)T(n =
0, 1 . . . . . N) if A* satisfies the equation
Or = m(A,)4 , (6.10)
where we use the expression for Or given in (6.5). For the
motion we are considering we have A n = An+ I = A* so that (6.10)
becomes
2 v ' (a*) -~=0. (6.11)
Comparing (6.11) to (6.7) shows that A* must be a stationary
point of V~, as claimed. []
To examine the linear stability of the fixed point we linearize
(6.6) to obtain the discrete equation of variations (5.24).
Particularizing this result for the solution (z*)~oo yields a
linearized At-advance mapping
1 3 . , , i f ' . ~'*)= ~-[ca bd], (6.12a)
where
1 2 1 . ( I 1 ~)
i ) = A r m - l ,
c = A t - ' m ( l - , n ~ - ) [ - / 2 ~ - ,Q~+4/3(1 1 , 1 2•-I
(6.12b)
1 2 1 " + , B ( I + ' ~ . . Q ~ + - ~ _ 1 1 a= 1 - ~ a , ~ - - i
a ; a~,,
D= I + -~O~-~
,02 / r 1 . -1
with the sampling frequencies O F and 0 t defined as
OF = At .~/m(~*) 2 ,
O~ = a t : m - ' V " ( x * ) .
For this solution one l~ay verify that det[~a,(~*,~'*) 1 = 1 so
that the stability condition is given by (5.25). Regarding the
linear stability of the fixed point we have the following
-
O. Gonzalez. J,('. Simo I ('omput. Methods Appl. Mech. Engrg.
134 (1996) 197-222 213
L E M M A 6.2. The relative equilibria for the conserving
algorithm on P is unconditionally relatively linearly stable.
P R O O F . The result again follows by direct verification of
(5.25). From (6.12) we have
= ! I I = 1 - 3 0 ~ _ + . O ~ . ( 6 . 1 3 ) z tr'~a'(£'*' £'*)'
~ 0 4 + t.o~ + ~.O~ + 2
Making the assumption .01 >> .of: > 0 yields a result
independent of ,f]~.. To see the effects of ~ - on (6.13) we
proceed as follows, Holding 121 fixed, we seek the value of I/F, if
any, for which (6.13) has a local extrema. Taking the first
variation yields .0¢ = 2 as the only stationary point. For this
value of .or: we get ½ t r l ~ , l = - 1 independent of .0,. In
particular, for any value of "Oi, we have l½ tr[,~a,ll 2.
Furthermore, one may show using (6.12) that at "Oe = 2 we have Aa~
= - l d e n . Hence, the energy-momentum consetwing algorithmic
relative equilibria is relatively linearly stable for all .O r, .Or
> 0. []
R E M A R K S 6.2. (1) In accordance with general results for
discrete Hamiltonian systems with symmetry we see that
the energy-momentum conserving algorithm on the canonical phase
space P exactly preserves the fixed point of the reduced dynamics,
and hence preserves the relati~,e equilibria of the original system
up to group motions.
(2) Since the conserving algorithm inherits the relative
Lyapunov stability of the relative equilibria from the underlying
~ystem we necessarily have unconditional relative linear
stability.
6.4. Algorithmic approximation on reduced phase space
To compare with the results in the preceding sections which were
obtained by reducin~ the algorithmic approximation on P. we
formulate the algorithm directly on the reduced space P and address
the question of linear stability for fixed points of this
formulation. Our conserving approxi- mation to the reduced
equations (4.16) is
A'*I - An = A t m - ~ l r ' + l " " (6.14)
7 r . . , - o r . = --At ff(A.. A.÷,),
where (').÷l~. =½[(') . + ( ' ) .*l] and or is of the form
flV..(~°+,)-v..(x°)]/[,~ .... - ,~ , l . ,~ .... ~,~,,; a ( a ,
, . a , + , ) = l . V , ( a ~ - - ) . ,~ .... =,~,,.
(6.15)
By inspection, a motion of the form ~. = (A*, 0) 1" (n = 0.1 . .
. . . N) satisfies (6.14) where A* = A* is a stationary point of
the exact amended potential V~,. Hence, E*= (A*,0) v is a fixed
point for the conserving algorithm on/5 and we see that the fixed
point of the reduced dynamics is exactly preserved.
To examine the linear stability of tile algorithmic fixed point
we consider an infinitesimal disturbance ttZ on the motion
(z*).u=,,. The infinitesimal disturbance satisfies the discrete
equation of variations
~E.+, = ~at(z'*, z'*) 6~., (6.16)
where "~at(z., z.+ i): Te./~---" Tr:.. ,/5 is the linearizcd
At-advance mapping. Lincarizing (6.14) about the solution ~*
yields
1 aa,(E*, ~ ' ) = ~ - [ c ~ ] , (6.17a)
where
-
214 o. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
1 1 a = 1 - ~ At'- m - V~(;t * ) ,
b = At m -t , (6.17b)
c = -- At V~( ;t * ) ,
d 1 1 . = 1 - - ~ A t 2 m - V~(,~ ) ,
D = 1 + 1 A t : m-'V~(X*).
As before, the fixed point is said to be linearly stable if the
mapping Aa~(z*, z*) is stable. From (6.17) one may verify that
det[Aa,)] = 1 and [½ t r [~ , l l < 1 so that the mapping Aa,
and hence the fixed point is unconditionally linearly stable.
R E M A R K 6.3. An important difference between the symplectic
mid-point algorithm and the energy- momentum conserving algorithm
is that the latter preserves the fixed point of the reduced
dynamics regardless of whether it is formulated on the canonical
phase space P or the reduced space P. This is a reflection of the
symmetry properties of the conserving algorithm (see [17]).
7. Numerical example: Verification of stability a n a l y s i
s
In this section we present a numerical example to verify the
stability results obtained in the preceding sections. Specifically,
we consider the conservative central force problem for a particle
of unit mass with a nonlinear spring potential V: •+---, R of the
form
1 V(A) = ] k(A 2 - 1) 2 . (7.1)
For the "stifF' case we take k = 106 and take as the amplitude
of the angular momentum p, = 10.
7.1. Mid-po in t approximat ion
To verify the "_esult of the stability analysis of the mid-point
algorithm on P we have plotted in Fig. 2 (half) the trace of the
amplification matrix (5.27) versus ~F- As the plot shows, the
stability condition (5.25) for the algorithmic relative equilibria
is violated for ~ > 2. At the point t'] F ~ 2 the
eigenvalues
. . . . ' . . . . i . . . . k
o
0 1 g 3
Fig. 2. Trace (up to a factor of one-half) of the linearized
At-advance mapping for the reduced mid-poin~ algorithm.
-
O. Gonzalez. J.C. Simo I Comput. Methods Appl, Mech. Engrg. 134
(1996) 197-222 215
of the amplification matrix experience a bifurcation from two
complex-conjugate roots with unit modulus into two real roots one
of which has modulus greater than unity.
For three values of At we integrated the equations of motion on
P using (5.1b) and plotted the reduced trajectories in ft. Figs.
3(a-c) show the fixed point i n / ; and neighboring solutions which
were obtained by specifying initial conditions slightly away from
the fixed point. Also shown are plots of the total energy versus
time for each trajecto~. For the plots of the trajectories in /5 we
have scaled the reduced momenta lr by a factor of 1 /Vmk to balance
the scaling between the ~r- and A-axes.
Note the dependence of the location of the fixed point z:* on
At. In Fig. 3(a) for At = 0,01 we have ~'*-(1.0013, 0) T. in Fig.
3(c) for At = 0.02 the fixcd point has moved to ~*--" (1.0050, 0)
T. Also note the
..." , ; \ " -,,
. °[4 i C'~ ~, i
o .~ 1.oo I i ~
ii.
:., • • • I . . . . ) . . . . * . . . . ) . ) I 05 1,0 1.5 2
,0
t
: 1 ! , . . " .... ' .............. ;'1 " o[ ," k : ; ~ i - -
~~l: \ , . . - .................... " . . /
0.98 t .00 1 .O2 0 O~ t .0 t .5 2.0
), ! (b)
~'-... ~ ...] .o.,t ~ ~ " ~ f .....
. . ,-:": . . . . . . . . . 1.004 1.005 1 .0 (0 0 1 2 3 4
1. t
(e) Fig. 3. Reduced phase trajectories and energy plots for the
mid-point algorithm on F for (a) At = 0.01 (.O~. ~ 0. I); (b) At =
0.015 (.O r ~ 0.15); (c) At = 0.02 (.O~. ~ 0.2). (0) denotes the
initial condition.
-
216 O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
2 101
tO '
,e 101
=: 10 '
• 10 a
tO*
10
1 0 2 4 I 0 2 4 I $ 10
J~ t
Fig. 4. Spurious solution obtained by continuing computations
along curve 5 of the previous figure. (0) denotes the initial
condition
size of the stability region in Fig. 3(c). In this figure,
curves 1-3 show the fixed point and neighboring solutions which
appear qualitatively correct. Slightly further away from the fixed
point we have curve 4 in which we begin to see corners in the
trajectory. Finally, curve 5 shows a solution which quickly leaves
the neighborhood of the fixed point and becomes a spurious
solution. Fig. 4 shows the spurious solution which results if we
proceed with the computations along curve 5.
Further increases in At yield similar behavior, i.e., the fixed
point continues to move to the right and the stability region
continues to shrink. By At = 0.13 (~r ~ 1) the stability region for
the fixed point cannot be resolved due to the precision of the
computations. The fixed point itself can be maintained only for a
few time steps before roundoff and tolerance errors drive the
solution out of the stability region. For some value of ,(2F
between 1 and 2 the fixed point vanishes, i.e. it is lost after the
first time step.
Fig. 5 shows the result of integrating the reduced equations of
motion on ,6 using (5.29b). in this case the solution curves are
independent of the time step so that we show only one plot. Here,
we note that the fixed point Z*- ' - (1.(~I , 0) T of the reduced
dynamics is exactly preserved and that the fixed point does not
have a limited stability region.
7.2. C o m e r v i n g approximat ion
The results of the stability analysis of the energy-momentum
conserving algorithm on P are verified in Fig. 6 where we have
plotted (half) the trace of the amplification matrix (6.13) versus
f/r. As the plot shows, the stability condition (5.25) for the
algorithmic relative equilibria is satisfied for all ~ / > 0.
The only exception is ~ r = 2 where we have [½ tr[/~,]] = 1. This
point, however, is still stable as discussed earlier.
m • - , | . . . . | . . . . i , - -
o~ . . ' " . . . . . . . ~ " ' .
c o u 1 .oo t .o2 o o6 1.o I ~ 2.o
) . t
Fig. 5. Phase trajectories and energy plots for the mid-point
algorithm on/~. Note that the trajectories are independent of At.
(O) denotes the initial condition.
-
O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 217
. ' ' ' ' 1 . . . . I . . . . I . . . . ! . . . . ,
1.0 .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
0.5
~ o
-O.5
-1.0 ........................................ " . . . . I . . .
. I . . . i | i i . . I . . , I '
0 10 20 30 40 50
Q ,
Fig. 6. Trace (up to a factor of one-half) of the linearized
At-advance mapping for the reduced energy-momentum conserving
algorithm.
i . . . | . . . . ! . . . . i . ' '
O02 • - - - , ~
r , " . o . . . . I "
o t ~ 4 * ',. , e t • : . ... ,
• . . . . • I I
0.t;8 1 .oo 1 no
l,
0 0-~ t.O 1.8 :1.0
t
Fig. 7. Reduced phase trajectories and energy plots for the
energy-momentum conserving algorithm on P. Note that the
trajectories are independent of Af. ( e ) denotes the initial
condition.
For At = 0.02 we integrated the equations of motion on P using
(6.1) together with (6.4) and plotted reduced trajectories in P.
Fig. 7 shows the fixed point and neighboring solutions as well as
the energy plots for each trajectory. For the conserving algorithm
the location of the fixed point [* "--(1.0001, 0) T is exact and is
independent of At, hence we show only one plot. Also, note that
this algorithm is not seen to have a limited stability region which
decreases with At as does the mid-l~int rule on P.
Fig. 8 shows the result of integrating the reduced equations of
motion on P using (6.14). Again, the trajectories are independent
of the time step so that we show only one plot. As with the
formulation on
............ i
." "" "" . . . . . . "" "~.. 4 0.02 .'" " , . . .
0]16 ! .00 I nO 0 O.S 1.0 1 .S 2.0
). t
Fig. 8. Phase trajectories and energy plots for the
energy-momentum ~:onserving algorithm on ,~. Note that the
trajectories are independent of ~ . tO) denotes the initial
condition.
-
218 O. Gonzalez. J.C. Simo / Comput, Methods Appl. Mech, Engrg,
134 (1996) 197.-222
P, the fixed point [*--~(1,0001,0) T of the reduced dynamics is
exactly preserved and does not have a limited stability region.
Note that the trajectories in this case are identical to those in
Fig. 7 which were obtained using the formulation on P.
8. Numerical accuracy comparisons
In this section we perform some numerical experiments to compare
the relative accuracy of the symplectic mid-point rule and the
energy-momentum conserving scheme. As we saw in the previous
section the symplectic mid-point rule can have stability problems
for stiff Hamiltonian systems with symmetry. However, for
moderately small time steps where the mid-point rule actually
performs well, the question arises as to how the relative accuracy
of the conserving scheme compares with that of the mid-point rule.
Also, it is of interest to know how conserving schemes compare with
the mid-point rule for non-stiff problems. In view of these
questions we perform our numerical experiments with the central
force problem using three different potentials: the classical
Kepler potential (non-stiff), a non-linear spring potential with
low stiffness, and a non-linear spring potential with high
stiffness (as considered in the previous section).
8. I. Classical Kepler potential
In this section we present a numerical accuracy comparison
between the symplectic mid-point rule and the conserving scheme
(both formulated on the original phase space) for the conservative
central force problem with the classical Kepler potential.
Specifically, we consider a particle of unit mass under the
influence of a central force field with potential V : R+ --* R of
the form
V(A) = - k / a . (8.1)
We take k = 100 and use the initial conditions qo = (0.9/V'2, 0,
0 .9/V~) and Po = (0, - 1 0 0 / 9 , 0). For the accuracy comparison
we will consider the time interval [0, T] with T = 4.40 and will
consider the relative displacement and momentum errors at time t =
7". For reference, Fig. 9 shows the trajectory from ~he above
initial condition for the time interval [0, T] computed using the
mid-point rule with a relatively small time step {similar results
obtained with the conserving scheme)•
For the accuracy comparison we computed the solution in the time
interval [0, T] for various time steps and plotted the relative
displacement error Eq(T)=Iq , , , (T ) -qc (T)J / lqc (T)J versus
At where qc(T) are the converged displacements at time t = T
computed with At = 10 -6. Results for the relative momentum error
Ep(T)= [pa , (T)-p~(T) I/]p,.(T)J were computed and plotted in a
similar manner. Fig. 10 shows the results for the Kepler
potential.
For this example we see that the conserving scheme has
substantially smaller displacement and momentum errors as compared
to the symplectic mid-point rule.
0.51 ~ ! 4).0 o.s -O.S
-I
- % ~ - o ° Fig. 9. Numerical trajectory for central force
problem with the classical Kei~er potential.
-
O. Gonzalez, J.C. Simo / Comput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 219
0.1
0.01
0.001
0.0001
1 ~ 7
tll-~ le-I~
/ /
/ / /
. . . . . . . . . . . . . . . . . . . . . . . . . . . , . . . .
. 11-06 0.0001 0.001 0.01
T~me Step
0.1
0.01
t~ 0.001 g i 0.0001
~,.~ 1 ~ 7
Ie-O8 . . . . . . . . ' . . . . . . . . . . . . . . . . ~ . . .
. . . . Ie-06 Ie-06 0.0001 0.001 0.01
Time Step
Fig. 10. Relative displacement error Eq(T) and relative momentum
error Ep(T) versus time step At for the central force problem with
the Kepler potential.
8.2. Non-s t i f f non-linear spring potential
To determine the effect of the force potential on the relative
performance of the conserving and mid-point schemes we next
consider an example in which the potential is positive-definite
(i.e. V"(A) > 0) along the motion. This is in contrast to the
Kepler potential which is negative-definite along motions. In
particular, we consider the central force problem with potential V:
R+--* R of the form
v ( ~ ) = ½k(A ~ - I y . (8.2)
We ta!:e k = 1000 and use the initial conditions q0 = (0.8/ 'v~,
0, 0.8/V~) and P0 = (0, - 100 /8 , 0). For the accuracy comparison
we will consider the time interval [0, T] with T = 0.63 and will
again consider the relative displacement and momentum errors at
time t = T. For reference, Fig. 11 shows the trajectory from the
above initial condition for the time interval [0, T] computed using
the mid-point rule with a relatively small time step (similar
results obtained with the conserving scheme).
Fig. 12 shows show the results of the accuracy comparison. For
this example we see that both schemes exhibit nearly identical
displacement errors. With regard to momentum errors, the mid-point
rule has a slightly smaller error for a wide range of time steps.
However, for small time steps it appears that the opposite may be
true. In general, the results show that both schemes have
comparable accuracy characteristics for the problem considered.
Comparing these results with those for the Kepler potential it is
clear that the relative performance of these schemes is problem
dependent.
x 0 0 j ~ ' ~ - ~ . . ~ -O~S "
*0.8 -o.Q .o.4 -o2 0 0 2 0.4 o. I 0.8
Fig. I I. Numerical trajectory for central force problem with
the non-stiff non-linear spring potential.
-
220 O. Gonzalez. J.C. Simo / Comput. Methods Appl. Mech. Engrg.
134 (1996) 197-222
0.0001
u~ le-05
j le-OG
1s~07
le-09 '
0.0001
le-05
1e-O?
1e-10 . . . . . . . . . . . . . . . . . . . ' ' - - le-09 le-06
le-05 0.0001 0.001 le-06
"r'm'w Slep
. . . . . . . . , . . . . . . . . , . . . . . . .
. j ' # / "
le-O5 o.oool o.ool
Trne Slop
Fig. 12. Relative displacement error Eq(T) and relative momentum
error Ep(T) versus time step At for the central force problem with
the non-stiff nonlinear spring potential.
8.3. St i f f non-linear spring potential
We next consider an example of a stiff system such as that
considered in our earlier stability analyses. In particular, we
consider a system with a non-linear spring potential V of the same
form as before with stiffness constant k = l0 s ~,nd use the same
initial conditions q0 = (0.8/~,~, 0, 0 . 8 / V ~ ) and P0 -- (0, -
100/8, 0). For the accuracy comparison we again consider the time
Jnie.rval [0, T] with T = 0.63 and consider the relative
displacement and momentum errors at time t = 7". For reference,
Fig. !'~ shows the trajectory from the above initial condition for
the time interval [0, T] computed using the mid-point rule with a
relatively small time step (similar results obtained with the
conserving scheme). Fig. 14 shows the results of the accuracy
comparison.
As we saw earlier [lie symplectic mid-point rule has stability
problems for stiff systems with symmetry. However, the numerical
results show that for small time steps the mid-point rule and
conserving scheme are nearly indistinguishable from the viewpoint
of accuracy. These results suggest that , at the expense of added
complexity, the conserving scheme possesses bet ter stability
properties than the mid-point rule without a compromise in
accuracy, at least for the problems considered herein.
1.5
0 . 5 ~ 1
n o.s -0.5
~. o
.~.s
• -1
.I.5 • 0.8 -.O.S -0.4 -0.2 0 0.2 0.4 O.S 0.8
Fig. 13. Numerical trajectory for central force problem with the
stiff non-linear spring potential.
-
O. Gonzalez. J.C. Simo / Cornput. Methods Appl. Mech. Engrg. 134
(1996) 197-222 221
1 . . . . . . . . , . . . . . . . . , . . . . . . . .
0.1
i 0.01
. 0.001
0.0001
le4~ It4~
~Cnen~g S c m m e --- .................... . , .
le-OS 0.0001 0.001
Tram S W
10
0.1
o.oi
J 0.001
. . . . . . . . , . . . . . . . . , . . . . . . .
Mk:l-Polnl Rule - -
0.0001 . . . . . . . . . . . . . . . . . . . . . . 0,, ln-06
11-06 0.0001 0.001
Tm',e Step
Fig. 14. Relative displacement error Eq(T) and relative momentum
error E,(T) versus time step At for the central force problem with
the stiff non-linear spring potential.
9. Concluding remarks
Within the context of a simple model problem, we have analyzed
the stability of the symplectic mid-point rule and an
energy-momentum algorithm. We saw that the mid-point rule
formulated on the canonical phase P possessed an algorithmic
relative equilibria which depended on the time step and which was
only conditionally stable. Also, we have shown by example that the
stability region for a 'stable' relative equilibria can decrease
dramatically as the time step is increased so that it is
practically unstable for time steps substantially below critical.
In contrast, the mid-point rule formulated on the reduced space/3
exactly preserved the relative equilibria of the original system up
to group motions. In this setting (i.e. in the absence of group
motions) the mid-point rule was shown to possess a fixed point
which was unconditionally linearly stable.
As an alternative to the symplcctic mid-point rule we introduced
an energy-momentum conserving algorithm. We saw that the
energy-momentum algorithm formulated on the canonical phase space P
had an algorithmic relative equilibria which was independent of the
time step, exact up to group motions, and unconditionally linearly
stable. Similar results were shown for a conserving algorithm
formulated directly on the reduced space.
Our stability analysis confirms a well-observed fact: the
symplectic mid-point rule can experience stability problems for
stiff systems with symmetry if the time step is not small.
Regarding accuracy, our numerical results show that for small time
steps the mid-point rule and conserving scheme are nearly
indistinguishable. These results suggest that, at the expense of
added complexity, the conserving scheme possesses better stability
properties than the mid-point rule without a compromise in
accuracy, at least for the simple model problems considered in this
paper.
References
[l] R. de Vogelaere, Methods of integration which preserve the
contact transformation property of Hamiltonian equations,
Department of Mathematics, University of Notre Dame, Report 4,
1956.
[2] Feng Kang, Difference schemes for Hamiltonian formalism and
symplectic geometry, J. Comput. Math. 4 (1986) 279-289. [3]
Lasagni, Canonical Runge-Kutta methods, ZAMP, 39 (1988) 952-953.
[4] J.M. Sanz-Serna, Runge-Kuua schemes for Hamiltonian systems,
BIT 28 (1988) 877-883.
-
222 O. Gonzalez, J.C. Simo I Comput. Me~hods Appl. Mech. Engrg.
134 (19961 197-222
[5] P.J. Chanell and C. Scovel, Symplectic integration of
Hamiltonian systems, Nonlinearity 3 (1990) 231-259. [6] C. Scovel,
Symplectic numerical integration of Hamiltonian systems, in: Tudor
Ratiu, eds., The Geometry of Hamihonian
Systems, Proc. Workshop held June 5th to 15th, 1989, pp.
463.496, (Springer-Veriag, 1991). [7] J.M. Sanz-Serna, The
numerical integration of Hamiltonian systems, Proc. Conf. on
Computational Differential Equations,
Imperial College, London, 3-7 July 1989 (1992,) in press. 18]
J.C. Simo and N. Tarnow, The discrete energy-momentum method.
Conserving algorithms for nonlinear elastodynamics,
ZAMP 43 (1992) 757-793. [9] J.C. Simo and N. Tarnow, A new
energy-momentum method for the dynamics of nonlinear shells, Int.
J. Numer. Methods
Eogrg. (1992), in press. [10] J.C. Simo, N. Tarnow and M.
Doblar~, Exact energy-momentum algorithms for the dynamics of
nonlinear rods, Int. J.
Numer. Methods Engrg. (1993), in press. [11] J.C. Simo and O.
Gonzalez, Assessment of energy-momentum and symplectic schemes for
stiff dynamical systems,
American Society of Mechanical Engineers, ASME Winter Annual
Meeting, New Orleans, Louisiana, 1993. [12] A. Bayliss and E.
Isaacson, How to make your algorithm conservative, Am. Math. Soc.
(1975) A594-A595. [13] R.A. Labudde and D. Greenspan, Energy and
momentum conserving methods of arbitrary order for the
numerical
integration of equations of motion. Part I, Numer. Math. 7.5
(1976) 323-346. !14] R.A. Labodde and D. Greenspan, Energy and
momentum conserving methods of arbitrary order for the
numerical
integration of equations of motion. Part I!, Numer. Math. 26
(1976) 1-16. [15] J.C. Simo and K.K. Woog, Unconditionally stable
algorithms for rigid body dynamics that exactly preserve energy
and
angular momentum, Int. J. Numer. Methods Eogrg. 31 (1991) 19-52.
[16] M. Austin, P.S. Krishnaprasad and L.C. Chert, Almost Poisson
integration of rigid body systems, J. Comput. Phys. 107(!)
(1993) 105-117. [17] O. Gonzalez, Design and analysis of
conserving integrators for nonlinear Hamiltonian systems with
symmetry, Ph.D.
Dissertation, Department of Mechanical Engineering, Division of
Applied Mechanics, Stanford University, 1995, to appear. [18] H.
Goldstein, Classical Mechanics, 2nd edition (Addison-Wesley, 1980).
[19] R. Abraham and J.E. Marsden, Foundations of Mechanics, 2nd
edition (Addison-Wesley, 1978). [20] S. Smale, Topology in
Mechanics I, lnventiones Math. 10 (1970) 305-331. [21] S. Smale,
Topology in Mechanics II, lnventiones Math. 11 (1970) 45-64. [22]
J.E. Marsden and A. Weiastein, Reduction of symplectic manifolds
with symmetry, Rep. Math. Phys. 5 (1974) 121-130. [23] J.C. Simo,
N. Tarnow and K.K. Woog, Exact energy-momentum conserving
algorithms and symplectic schemes for
nonlinear dynamics, Comput. Methods Appl. Mech. Engrg. 1 (1992)
63-116.