Embed Size (px)
Citation preview

IMA Journal of Mathematical Control and InformationPage 1 of21doi:10.1093/imamci/dns003
On the Lyapunov-based second-order SMC design for some classes ofdistributed parameter systems
YURY ORLOV
CICESEResearch Center, Ensenada, Mexico
ALESSANDROPISANO∗, STEFANO SCODINA AND ELIO USAI
Departmentof Electrical and Electronic Engineering, University of Cagliari, Cagliari, Italy∗Correspondingauthor: [email protected]
[Received on 14 January 2011; revised on 12 October 2011; accepted on 30 December 2011]
This paper addresses the Lyapunov-based design of second-order sliding mode controllers in the domainof distributed parameter systems (DPSs). To the best of our knowledge, the recent authors’ publica-tions (Orlov et al., 2010, Continuous state-feedback tracking of an uncertain heat diffusion process.Syst.Control Lett.,59, 754–759;Orlov et al., 2011, Exponential stabilization of the uncertain wave equationvia distributed dynamic input extension.IEEE Trans. Autom. Control, 56, 212–217;Pisanoet al.,2011,Tracking control of the uncertain heat and wave equation via power-fractional and sliding-mode tech-niques.SIAM J. Control Optim., 49, 363–382) represent the seminal applications of second-order slidingmode control techniques to DPSs. A Lyapunov-based framework of analysis was found to be appropriatein the above publications. While reviewing the main existing results in this new field of investigation, thepaper provides the novelty as well and gives several hints and perspectives for the generalization, listingsome open problems.
Keywords: distributed parameter systems; heat equation; wave equation; second-order sliding modecontrol; Lyapunov analysis.
1. Introduction
Sliding mode control has long been recognized as a powerful control method to counteract non-vanishingexternal disturbances and unmodelled dynamics when controlling dynamical systems of finite and infi-nite dimension (seeUtkin, 1992).
Presently, the discontinuous control synthesis in the infinite-dimensional setting is well documented(seeLevaggi, 2002;Orlov, 2000,2009;Orlov & Utkin, 1987;Orlov et al., 2004) and it is generallyshown to retain the main robustness features as those possessed by its finite-dimensional counterpart.Other robust control paradigms have been fruitfully applied in the infinite-dimensional setting suchas adaptive and model-reference control (seeKrstic & Smyshlyaev, 2008b;Demetriouet al., 2009),geometric and Lyapunov-based design (seeChristofides,2001) andH∞ and LMI-based design (seeFridman & Orlov,2009). It should be noted that the latter paradigms are capable of ‘attenuating’ van-ishing disturbances only, whereas the former discontinuous control is additionally capable of ‘rejecting’persistent disturbances with ana priori known bound on theirL2-norm.
In the present paper, we consider generalized uncertain forms of two popular parabolic and hy-perbolic infinite-dimensional dynamics, the heat and wave equations, under the effect of an externalsmooth disturbance. In some recent authors’ publications (seeOrlov et al., 2010,2011;Pisanoet al.,2011), two finite-dimensional robust control algorithms, namely, the ‘super-twisting’ and ‘twisting’
c© Theauthor 2012. Published by Oxford University Press on behalf of the Institute of Mathematics and its Applications. All rights reserved.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2 of 21 Y. ORLOV ET AL.
second-ordersliding mode controllers (2-SMCs) (seeFridman & Levant, 1996;Levant, 1993, for detailson these controllers), have been generalized to the infinite-dimensional setting and applied for control-ling heat and wave processes, respectively. The mentioned 2-SMCs are of special interest because in thefinite-dimensional setting they significantly improve the performance of sliding mode control systems,in terms of accuracy and chattering avoidance, as compared to the standard ‘first-order’ sliding modecontrol techniques (seeBartolini et al.,2002).
In this paper, we enlarge the class of controlled dynamics as compared to existing publications (cf.Orlov et al., 2010,2011;Pisanoet al., 2011) by considering generalized forms of the heat and waveequations. More precisely, we consider the presence of some additional terms in the plant equation(dispersion and damping terms) and, furthermore, we let all the system parameters (diffusivity anddispersion coefficients, for the heat equation, and the wave velocity, the damping coefficient and thedispersion coefficient, for the wave equation) to be spatially varying and uncertain. We additionally putthe constraint that the distributed control input must be a continuous (although possibly non-smooth)function of the space and time variables.
The rest of the paper is structured as follows. Some notations are introduced in the remainder ofSection1. Section2 presents the problem formulation for the tracking control of the generalized heatequation and describes the associated solution, based on a proper combination of distributed versionsof proportional-integral (PI) and super-twisting control. Section3 presents the problem formulationfor the tracking control of the generalized wave equation and describes the associated solution, basedon a proper combination of distributed versions of proportional-derivative (PD) and twisting controlwith dynamic input extension. Section4 illustrates some relevant numerical simulation results. Finally,Section5 gives some concluding remarks and draws possible directions of improvement of the proposedresults.Notation. In general, the notation used throughout is fairly standard (seeCurtain & Zwart, 1995, fordetails).L2(a, b), with a 6 b, stands for the Hilbert space of square integrable functionsz(ζ ), ζ ∈[a, b], equipped with theL2-norm
‖z(∙)‖2 = 2
√∫ b
az2(ζ )dζ . (1.1)
Wl ,2(a, b) denotesthe Sobolev space of absolutely continuous scalar functionsz(ζ ), ζ ∈ [a, b], withsquare integrable derivativesz(i )(ζ ) up to the orderl > 1.A non-standard notation stands for
Ω4,2(0,1)= {ω(ξ) ∈ W4,2(0,1):√
|ω(ξ)|sign(ω(ξ))∈ W2,2(0,1)}. (1.2)
2. Supertwisting synthesis of reaction–diffusion processes
Consider the space- and time-varying scalar fieldQ(ξ, t) evolving in a Hilbert spaceL2(0,1), whereξ ∈ [0, 1] is the monodimensional (1D) space variable andt > 0 is the time. Let it be governed by thefollowing perturbed reaction–diffusion equation with spatially varying parameters
Qt (ξ, t) = [θ1(ξ)Qξ (ξ, t)]ξ + θ2(ξ)Q(ξ, t)+ u(ξ, t)+ ψ(ξ), (2.1)
whereθ1(∙) ∈ C1(0,1) is a positive-definite spatially varying parameter called ‘thermal conductivity’(or, more generally, ‘diffusivity’),θ2(∙) ∈ C1(0,1) is another spatially varying parameter called ‘dis-persion’ (or ‘reaction constant’),u(ξ, t) is the modifiable source term (the distributed control input) and
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 3 of 21
ψ(ξ) represents an ‘uncertain’ time-independent spatially distributed disturbance source term, which isassumed to be of classW2,2(0,1), i.e.
ψ(ξ) ∈ W2,2(0,1). (2.2)
The time-independent spatially varying diffusivity and dispersion coefficientsθ1(ξ) and θ2(ξ) aresupposed to be uncertain, too. We consider non-homogeneous mixed boundary conditions (BCs)
Q(0, t)− α0Qξ (0, t)= Q0(t) ∈ W1,2(0,∞), (2.3)
Q(1, t)+ α1Qξ (1, t)= Q1(t) ∈ W1,2(0,∞), (2.4)
with some positive uncertain constantsα0, α1. The initial conditions (ICs)
Q(ξ, 0)= ω0(ξ) ∈ Ω4,2(0,1) (2.5)
areassumed to be of class (1.2) and to meet the same BCs.Since non-homogeneous BCs are in force, a solution of the above boundary-value problem is defined
in the mild sense (seeCurtain & Zwart, 1995) as that of the corresponding integral equation, written interms of the strongly continuous semigroup, generated by the infinitesimal plant operator.
The control task is to make the scalar fieldQ(ξ, t) to asymptotically decay, in theL2-norm,to anapriori given referenceQr (ξ) ∈ Ω4,2(0,1), satisfying the BCs (2.3).
2.1 Robust control of the reaction–diffusion process
Consider the deviation variable
x(ξ, t) = Q(ξ, t)− Qr (ξ), (2.6)
whoseL2-norm will be driven to zero by the designed feedback control. The dynamics of the errorvariable (2.6) is easily derived as
xt (ξ, t) = [θ1(ξ)xξ (ξ, t)]ξ + θ2(ξ)x(ξ, t)+ u(ξ, t)+ η(ξ), (2.7)
with the ‘augmented’ disturbance
η(ξ) = [θ1(ξ)Qrξ (ξ)]ξ + θ2(ξ)Q
r (ξ)+ ψ(ξ) (2.8)
and the next ICs and homogeneous mixed BCs
x(ξ, 0)= ω0(ξ)− Qr (ξ, 0) ∈ Ω4,2(0,1), (2.9)
x(0, t)− α0xξ (0, t) = x(1, t)+ α1xξ (1, t) = 0. (2.10)
Assumewhat follows.
ASSUMPTION 2.1 There exist possibly uncertain constantsΘ1m,Θ1M suchthat
0< Θ1m 6 θ1(ξ) 6 Θ1M , for all ξ ∈ [0, 1], (2.11)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

4 of 21 Y. ORLOV ET AL.
andthere is ana priori known constantΘ2M suchthat
|θ2(ξ)| 6 Θ2M , for all ξ ∈ [0, 1]. (2.12)
It should be noted that the assumptions on the ICs and BCs, made above, allow us to deal withstrong, sufficiently smooth solutions of the uncertain error dynamics (2.7–2.10) in the open loop whenno control input is applied.
In order to stabilize the error dynamics, it is proposed a dynamical distributed controller defined asfollows:
u(ξ, t)= −λ1√
|x(ξ, t)|sign(x(ξ, t))− λ2x(ξ, t)+ v(ξ, t), (2.13)
vt (ξ, t)= −W1x(ξ, t)
‖x(∙, t)‖2− W2x(ξ, t), v(ξ, 0)= 0, (2.14)
which can be seen as a distributed version of the finite-dimensional super-twisting 2-SMC (seeFridman & Levant,1996;Levant, 1993) complemented by the two additional proportional and inte-gral linear terms with gainsλ2 andW2, respectively. For ease of reference, the combined distributedsuper-twisting/PI controller (2.13–2.14) will be abbreviated as DSTPI.
The non-smooth nature of the DSTPI controller (2.13–2.14), that undergoes discontinuities on themanifoldx = 0 due to the discontinous termx(ξ,t)
‖x(∙,t)‖2, requires appropriate analysis about the meaning
of the corresponding solutions for the resulting discontinuous feedback system. The precise meaningof the solutions of (2.7), (2.9) and (2.10) with the piecewise continuously differentiable control input(2.13–2.14) can be defined in a generalized sense (seeOrlov, 2009) as a limiting result obtained througha certain regularization procedure, similar to that proposed for finite-dimensional systems (seeFilippov,1988;Utkin, 1992). According to this procedure, the strong solutions of the boundary-value problem areonly considered whenever they are beyond the discontinuity manifoldx = 0, whereas in a vicinity of thismanifold the original system is replaced by a related system, which takes into account all possible im-perfections (e.g. delay, hysteresis, saturation, etc.) in the new input functionuδ(x, ξ, t), for which thereexists a strong solutionxδ(ξ, t) of the corresponding boundary-value problem with the smoothed inputuδ(x, ξ, t). In particular, a relevant approximation occurs when the discontinuous termU (x) = x(ξ,t)
‖x(∙,t)‖2
is substituted by the smooth approximationU δ(x) = x(ξ,t)δ+‖x(∙,t)‖2
, where δ is a positive coefficient.A generalized solution of the system in question is then obtained through the limiting procedure bydiminishingδ to zero, thereby making the characteristics of the new system approach those of the orig-inal one. As in the finite-dimensional case, a motion along the discontinuity manifold is referred to as a‘sliding mode’.
REMARK 2.1 The existence of generalized solutions, thus defined, has been established within the ab-stract framework of Hilbert space-valued dynamic systems (cf., e.g.Orlov, 2009, Theorem 2.4), whereasthe uniqueness and well-posedness appear to follow from the fact that in the system in question, no slid-ing mode occurs but in the originx = 0. While being well recognized for second-order sliding modecontrol algorithms if confined to the finite-dimensional setting, this fact, however, remains beyond thescope of the present investigation.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 5 of 21
The performance of the closed-loop system is analysed in the next theorem.
THEOREM 2.1 Consider the perturbed diffusion/dispersion equations (2.1–2.3) satisfying Assumption2.1. Then, the distributed control strategy (2.6), (2.13–2.14), with the parametersλ1, λ2, W1 andW2selectedaccording to
λ2 > Θ2M , W1 > 0, λ1 > 0, W2 > 0, (2.15)
guaranteesthe global asymptotic stability in theL2-spaceof the solutionx(ξ, t) of the closed-loopsystem (2.7–2.10).
Proof of Theorem2.1.Define the auxiliary variable
δ(ξ, t) = v(ξ, t)+ η(ξ). (2.16)
System (2.7) with the control law (2.13–2.14) yields the following closed-loop dynamics in the newx − δ coordinates
xt (ξ, t)= [θ1(ξ)xξ (ξ, t)]ξ − λ1√
|x(ξ, t)|sign(x(ξ, t))− (λ2 − θ2(ξ))x(ξ, t)+ δ(ξ, t), (2.17)
δt (ξ, t)= −W1x(ξ, t)
‖x(∙, t)‖2− W2x(ξ, t). (2.18)
In order to simplify the notation, the dependence of the system coordinates from the space and timevariables(ξ, t) will be mostly omitted from this point on. Setting
s = xt = [θ1(ξ)xξ ]ξ − λ1√
|x|sign(x)− [λ2 − θ2(ξ)]x + δ, (2.19)
consider the following Lyapunov functional
V1(t) = 2W1‖x‖2 + W2‖x‖22 +
1
2‖δ‖2
2 +1
2‖s‖2
2, (2.20)
inspiredfrom the finite-dimensional treatment ofMoreno & Osorio(2008). The time derivative ofV1(t)is given by
V1(t)=2W1
‖x‖2
∫ 1
0xsdξ + 2W2
∫ 1
0xsdξ +
∫ 1
0δδt dξ +
∫ 1
0sst dξ, (2.21)
where
st = [θ1(ξ)sξ ]ξ −1
2λ1
s√
|x|− [λ2 − θ2(ξ)]s − W1
x
‖x‖2− W2x (2.22)
is formally obtained by differentiating (2.19) along the solutions of (2.17), (2.18).
REMARK 2.2 To verify that the differentiation of (2.19) is legible, it suffices to note that the non-linearterm of the state variable, that appear in (2.17), is clearly differentiable beyond the parameterized region
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

6 of 21 Y. ORLOV ET AL.
Dξ0,ξ1 = {x ∈ L2(0,1): x(ξ, t) = 0 ∀ ξ ∈ (ξ0, ξ1) ⊂ [0, 1], t ∈ (t0, t1) ⊂ [0,∞)},
wherethe system, while being confined toξ ∈ (ξ0, ξ1) ⊂ [0, 1], possesses a local equilibrium onthe time intervalt ∈ (t0, t1) ⊂ [0,∞), whereas withinDξ0,ξ1, the non-differentiable term of the sec-ond term and possibly (iffξ0 = 0,ξ1 = 1) the fourth term in (2.19), become identically zero for allξ ∈ (ξ0, ξ1), t ∈ (t0, t1). Thus, standard arguments, used in smooth partial differential equation (PDE)(similar to that ofCurtain & Zwart,1995, Theorem 3.1.3;Krasnoselskiiet al., 1976, Theorem 23.2),apply here beyond the origin to make sure that under the regularity assumption1 (2.9), imposed on theICs, (2.17) can be differentiated in time, thereby validating (2.22) everywhere except the origin wherethe well-posedness of (2.21–2.22) is trivially validated.
Substituting (2.18) and (2.22) into (2.21) and rearranging yield
V1(t)=2W1
‖x‖2
∫ 1
0xsdξ + 2W2
∫ 1
0xsdξ −
W1
‖x‖2
∫ 1
0δx dξ − W2
∫ 1
0δx dξ +
∫ 1
0s[θ1(ξ)sξ ]ξ dξ
−1
2λ1
∫ 1
0
s2 dξ√
|x|−∫ 1
0[λ2 − θ2(ξ)]s
2 dξ −W1
‖x‖2
∫ 1
0xsdξ − W2
∫ 1
0xsdξ, (2.23)
which can be manipulated as follows by virtue of Assumption2.1:
V1(t)6−W1
‖x‖2
∫ 1
0x(δ − s)dξ − W2
∫ 1
0x(δ − s)dξ +
∫ 1
0s[θ1(ξ)sξ ]ξ dξ
−1
2λ1
∫ 1
0
s2 dξ√
|x|− [λ2 −Θ2M ]
∫ 1
0s2 dξ. (2.24)
By (2.19), one has
δ − s= λ1√
|x|sign(x)+ [λ2 − θ2(ξ)]x − [θ1(ξ)xξ ]ξ , (2.25)
δ + s= 2s+ λ1√
|x|sign(x)+ [λ2 − θ2(ξ)]x − [θ1(ξ)xξ ]ξ . (2.26)
Dueto this, and considering once more Assumption2.1, (2.24) can further be manipulated as
V1(t)6−W1λ1
‖x‖2
∫ 1
0x√
|x|sign(x)dξ −W1[λ2 −Θ2M ]
‖x‖2
∫ 1
0x2 dξ +
W1
‖x‖2
∫ 1
0x[θ1(ξ)xξ ]ξ dξ
−W2λ1
∫ 1
0x√
|x|sign(x)dξ − W2[λ2 −Θ2M ]∫ 1
0x2 dξ + W2
∫ 1
0x[θ1(ξ)xξ ]ξ dξ
+∫ 1
0s[θ1(ξ)sξ ]ξ dξ −
1
2λ1
∫ 1
0
s2 dξ√
|x|− [λ2 −Θ2M ]
∫ 1
0s2 dξ. (2.27)
1Thisassumption ensures thats(ξ, 0), specified according to (2.19), is of classW2,2(0,1), so that Remark2.1remains in forceto argue the existence of generalized solutionss(ξ, t) of (2.22).
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 7 of 21
By taking into account the BCs (2.10) and their time derivatives, standard integration by parts yields
∫ 1
0x[θ1(ξ)xξ ]ξ dξ = −
∫ 1
0θ1(ξ)x
2ξ dξ + θ1(1)x(1, t)xξ (1, t)− θ1(0)x(0, t)xξ (0, t)
6−Θ1m‖xξ‖22 − θ1(1)
x2(1, t)
α1− θ1(0)
x2(0, t)
α0, (2.28)
∫ 1
0s[θ1(ξ)sξ ]ξ dξ = −
∫ 1
0θ1(ξ)s
2ξ dξ + θ1(1)s(1, t)sξ (1, t)− θ1(0)s(0, t)sξ (0, t)
6−Θ1m‖sξ‖22 − θ1(1)
s2(1, t)
α1− θ1(0)
s2(0, t)
α0. (2.29)
Additional straightforward manipulations of (2.27) taking into account (2.28) and (2.29) yield
V1(t)6−W1[λ2 −Θ2M ]‖x‖2 − W2[λ2 −Θ2M ]‖x‖22 − W1Θ1m
‖xξ‖22
‖x‖2−
W1
‖x‖2θ1(1)
x2(1, t)
α1
−W1
‖x‖2θ1(0)
x2(0, t)
α0− W2Θ1m‖xξ‖
22 − W2θ1(1)
x2(1, t)
α1− W2θ1(0)
x2(0, t)
α0
− [λ2 −Θ2M ]‖s‖22 −Θ1m‖sξ‖
22 − θ1(1)
s2(1, t)
α1− θ1(0)
s2(0, t)
α0
− W2λ1
∫ 1
0|x|3/2 dξ −
1
2λ1
∫ 1
0
s2 dξ√
|x|−
W1λ1
‖x‖2
∫ 1
0
√|x||x|dξ. (2.30)
It is worth noting that by virtue of the tuning inequalityλ2 > Θ2M in (2.15), all terms appearing in theright-hand side of (2.30) are negative definite. To complete the proof, it remains to demonstrate that
‖x(∙, t)‖2 → 0 ast → ∞. (2.31)
For this purpose, let us integrate the relation
˙V(t) 6 −W1(λ2 −Θ2M )‖x‖2, (2.32)
straightforwardly resulting from the negative definiteness of all terms in the right-hand side of (2.30),to conclude that
∫ ∞
0‖x(∙, t)‖2 dt < ∞. (2.33)
TheinequalityV1(t) 6 0 guarantees thatV1(t) 6 V1(0) for any t > 0. From this, and considering(2.20), one can conclude that theL2-normof s = xt fulfills the estimation
‖xt‖22 6 2V1(0), ∀ t > 0. (2.34)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

8 of 21 Y. ORLOV ET AL.
Thus,the integrandω(t) = ‖x(∙, t)‖2 of (2.33) possesses a uniformly bounded time derivative
ω(t) =
∫ 10 xxt dξ
‖x‖26 ‖xt‖2 6
√2R (2.35)
on the semi-infinite time intervalt ∈ [0,∞), whereR is any positive constant such thatR > V1(0).Convergence (2.31) is then verified by applying the Barbalat lemma (seeKhalil, 2002). Since theLyapunov functional (2.20) is radially unbounded, the global asymptotic stability of the closed-loopsystem (2.7–2.10) is thus established in theL2-space.Theorem2.1 is proved. �
REMARK 2.3 If the spatially varying profilesθ1(ξ), θ2(ξ) of the system parameters are known, then atrivial modification of the suggested controller can be made in order to ensure the same convergenceproperty (2.31) with a time-dependent referenceQr (ξ, t) ∈ W2,2, too. The corresponding modifiedcontroller is
u(ξ, t)= u f f (ξ, t)− λ1√
|x(ξ, t)|sign(x(ξ, t))− λ2x(ξ, t)+ v(ξ, t), (2.36)
vt (ξ, t)= −W1x(ξ, t)
‖x(∙, t)‖2− W2x(ξ, t), v(ξ, 0)= 0, (2.37)
with the control parameters subject to the same tuning conditions (2.15) and the additional feedforwardterm
u f f (ξ, t)= Qrt (ξ, t)− [θ1(ξ)Q
rξ (ξ)]ξ − θ2(ξ)Q
r (ξ). (2.38)
The proof can be easily developed by observing that the resulting external disturbance, affecting thecorresponding error system, remains time independent so that the line of reasoning used in the proof ofTheorem2.1 is applicable here as well. The detailed proof is thus omitted for brevity.
3. Twisting synthesis of perturbed wave processes
We consider a class of uncertain infinite-dimensional systems whose(y, yt ) solutionis defined in theHilbert spaceL2(0,1)× L2(0,1) andis governed by the next hyperbolic PDE
ytt (ξ, t) = [ν2(ξ)yξ ]ξ + θ1(ξ)y(ξ, t)+ θ2(ξ)yt (ξ, t)+ u(ξ, t)+ ψ(ξ, t) (3.1)
with spatially varying parameters, wherey ∈ L2(0,1) and yt ∈ L2(0,1) are the state variables,ξ ∈ [0, 1] is the monodimensional (1D) spatial variable andt > 0 is the time. The spatially vary-ing coefficientν2(∙) ∈ C1(0,1) representsthe squared value of the wave velocity, andθ1(∙) ∈ C1(0,1),θ2(∙) ∈ C1(0,1) are referred to, respectively, as the dispersion and damping coefficients.u(ξ, t) ∈L2(0,1) is the modifiable source term (the distributed control input), andψ(ξ, t) ∈ L2(0,1) representsanuncertain spatially distributed disturbance source term, which, in contrast to the heat process, is ad-mitted to be time varying. The spatially varying (but time-independent) parameters are supposed to beuncertain, too, and satisfying the next assumption.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 9 of 21
ASSUMPTION 3.1 There exista priori known constantsΥm, ΥM ,Θ1 andΘ2 suchthat
0< Υm 6 ν2(ξ) 6 ΥM , |θ1(ξ)| 6 Θ1, |θ2(ξ)| 6 Θ2, ∀ ξ ∈ [0, 1]. (3.2)
We consider non-homogeneous mixed BCs
y(0, t)− β0yξ (0, t)= Y0(t) ∈ W1,2(0,∞), (3.3)
y(1, t)+ β1yξ (1, t)= Y1(t) ∈ W1,2(0,∞), (3.4)
with some positive uncertain constantsβ0, β1 andthe ICs
y(ξ, 0)= ϕ0(ξ) ∈ W4,2(0,1), yt (ξ, 0)= ϕ1(ξ) ∈ W4,2(0,1), (3.5)
whereϕ0(∙), ϕ1(∙) arealso assumed to meet the BCs imposed on the system. As in the diffusion equationcase, non-homogeneous BCs are in general admitted, which is why a solution of the above boundary-value problem is defined in the mild sense (seeCurtain & Zwart,1995). The control task is to makethe positiony(ξ, t) and the velocityyt (ξ, t) to exponentially track ana priori given reference signalyr (ξ, t) and, respectively, its velocityyr
t (ξ, t) in the L2-space,regardless of whichever admissible dis-turbanceψ(ξ, t) affects the system. It is assumed throughout that the reference signalyr (ξ, t) and itstime derivatives are smooth enough in the sense that
yr (∙, t) ∈ W4,2(0,1), yrt (∙, t) ∈ W4,2(0,1), yr
tt (∙, t) ∈ L2(0,1), ∀ t > 0. (3.6)
Apart from this, the reference signal is assumed to meet the actual BCs (3.3–3.4).The ‘deviation variables’
y(ξ, t) = y(ξ, t)− yr (ξ, t), yt (ξ, t) = yt (ξ, t)− yrt (ξ, t) (3.7)
are then to eventually be driven to zero inL2-normby the controller to be designed. By differentiating(3.7) and making appropriate substitutions and manipulations, one derives the next PDE governing thecorresponding error dynamics
yt t (ξ, t)= [ν2(ξ)yξ ]ξ + θ1(ξ)y(ξ, t)+ θ2(ξ)yt (ξ, t)+ u(ξ, t)
+ψ(ξ, t)− yrtt (ξ, t)+ [ν2(ξ)yr
ξ ]ξ + θ1(ξ)yr (ξ, t)+ θ2(ξ)y
rt (ξ, t), (3.8)
with the ICs
y(ξ, 0)= ϕ0(ξ)− ϕr0(ξ) ∈ W4,2(0,1), yt (ξ, 0)= ϕ1(ξ)− ϕr
1(ξ) ∈ W4,2(0,1), (3.9)
andhomogeneous BCs
y(0, t)− β0yξ (0, t) = y(1, t)+ β1yξ (1, t) = 0. (3.10)
Theassumptions on the ICs and BCs, made above, allow us to deal with strong, sufficiently smoothsolutions of the uncertain error dynamics (3.8–3.10) in the open loop when no control input is applied.Just in case, the open-loop system locally possesses a unique (twice differentiable in time) strong
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

10of 21 Y. ORLOV ET AL.
solutiony(ξ, t) which is defined in a standard manner (seeCurtain & Zwart, 1995) as an absolutely con-tinuous function, almost everywhere satisfying the corresponding PDE rather than its integral counterpart.
The class of reference signals and admissible disturbances is specified in the next assumptions.
ASSUMPTION 3.2 There exista priori known constantsH0, . . . , H4 suchthat the reference trajectoryyr (ξ, t) and its spatial and temporal derivatives meet the following inequalities for allt > 0:
‖yr (∙, t)‖2 6 H0, ‖yrt (∙, t)‖2 6 H1, ‖yr
tt (∙, t)‖2 6 H2, (3.11)
‖[ν2(ξ)yrξ (∙, t)]ξ‖2 6 H3, ‖[ν2(ξ)yr
tξ (∙, t)]ξ‖2 6 H4. (3.12)
ASSUMPTION 3.3 There exista priori known constantsΨ0, Ψ1 suchthat the disturbanceψ(ξ, t) andits temporal derivative meet the following inequalities for allt > 0:
‖ψ(∙, t)‖2 6 Ψ0, ‖ψt (∙, t)‖2 6 Ψ1. (3.13)
3.1 Distributed sliding manifold design
Define the distributed sliding variableσ ∈ L2(0,1) asfollows:
σ(ξ, t) = yt (ξ, t)+ cy(ξ, t), c > 0. (3.14)
The motion of the system constrained on the sliding manifoldσ(ξ, t) = 0 is governed by the corre-sponding simple first-order ordinary differential equationyt (ξ, t)+cy(ξ, t) = 0 with the spatial variableξ to be viewed as a parameter, whose solutiony(ξ, t), along with its time derivative, exponentially tendsto zero inL2(0,1)-norm.Hence, the control task can be reduced to the simplified problem of steeringto zero theL2-normof the distributed sliding variable.
In order to simplify the notation, the dependence of the system signals from the space and timevariables(ξ, t) will be mostly omitted from this point on. Consider the first- and second-order timederivatives of the above defined distributed sliding variableσ :
σt = yt t + cyt , σt t = yt t t + cytt . (3.15)
Differentiating the error dynamics (3.8), it derives
yt t t = [ν2(ξ)ytξ ]ξ + θ1(ξ)yt + θ2(ξ)yt t + ut + ψt − yrttt + [ν2(ξ)yr
tξ ]ξ + θ1(ξ)yrt + θ2(ξ)y
rtt . (3.16)
Thensubstituting (3.8) and (3.16) into the second term of (3.15) yields, after some manipulations,
σt t = [ν2(ξ)(yt ξ + cyξ )]ξ + θ1(ξ)[ yt + cy] + θ2(ξ)[ yt t + cyt ] + ut + cu − yrttt − cyr
tt + ψ, (3.17)
where
ψ = ψt + cψ + [ν2(ξ)(yrtξ + cyr
ξ )]ξ + θ1(ξ)(yrt + cyr )+ θ2(ξ)(y
rtt + cyr
t ) (3.18)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 11of 21
is an uncertain ‘augmented’ disturbance depending on both the disturbanceψ and the reference trajec-tory yr , and their derivatives.
By exploiting Assumptions3.1, 3.2 and3.3, it follows that the next restriction on theL2-norm ofthe augmenteddisturbanceψ holdsfor all t > 0
‖ψ(∙, t)‖2 6 M ≡ Ψ1 + cΨ0 + (H4 + cH3)+Θ1(H1 + cH0)+Θ2(H2 + cH1). (3.19)
After simple additional manipulations, one obtains that the sliding variableσ is governed by a PDEwhich is formally equivalent to the original wave equation (3.1), with a new fictitious control variablevwhich dynamically depends on the original plant control inputu, according to
σt t = [ν2(ξ)σξ ]ξ + θ1(ξ)σ + θ2(ξ)σt + v − yrttt − cyr
tt + ψ, (3.20)
v = ut + cu, (3.21)
equipped with the appropriate ICs and the next ‘homogeneous’ BCs
σ(0, t)− β0σξ (0, t) = σ(1, t)+ β1σξ (1, t) = 0. (3.22)
3.2 CombinedPD/sliding mode control of the wave process
In order to stabilize the uncertain dynamics (3.20), (3.22), the following distributed controller
v = yrttt + cyr
tt − W1σ − W2σt − λ1σ
‖σ(∙, t)‖2− λ2
σt
‖σt (∙, t)‖2(3.23)
is proposed for generating the fictitious controlv. Controller (3.23) can be viewed as a mixed lin-ear/sliding mode control algorithm, with a feedforward term, a linear PD-type feedback term, and withthe discontinuous feedback term being a distributed version of the finite-dimensional ‘twisting’ con-troller, which belongs to the class of so-called 2-SMCs (seeLevant, 1993).
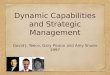
It is worth to discuss how the actual control inputu(ξ, t) should be recovered fromv(ξ, t) once thelatter has been computed according to (3.23). In relation (3.21), the spatial variableξ can be viewed asa fixed parameter. By virtue of this fact, (3.21) can be interpreted as a continuum of first-order ODEswhose parameterized solutions give rise to the actual control input to be applied to the wave equation.The transfer function block 1
s+c (with s beingthe Laplace variable andc being the positive constantin (3.14)) can effectively represent the relation between signalsv(ξ, t) (considered as the block input)andu(ξ, t) (considered as the block output). The plant controlu(ξ, t), obtained at the output of a dy-namical filter driven by the discontinuous controlv(ξ, t), will therefore be a continuous signal with adiscontinuous time derivativeut (ξ, t) = v(ξ, t) − cu(ξ, t), according to the associated block schemein Fig. 1.
The solution concept of the wave process (3.20–3.22) subject to the control strategy (3.23), (3.7),(3.14) is defined in the same manner as that of the diffusion process dealt with in Section 2, i.e. by meansof an appropriate limiting procedure. The exponential stability in the spaceL2(0,1) of the system inquestion is demonstrated in Theorem3.1, given below.
THEOREM 3.1 Consider the generalized wave equation (3.1) along with the ICs and BCs (3.5) and(3.3), and whose parameters, reference trajectory and external disturbance satisfy Assumptions3.1,3.2and3.3. Consider the associated error variable (3.7) and the sliding variable (3.14). Then, the distributedcontrol strategy (3.23) with the parametersW1,W2, λ1 andλ2 suchthat
W1 > Θ1, W2 > Θ2, λ2 > M, λ1 > λ2 + M, (3.24)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

12 of21 Y. ORLOV ET AL.
FIG. 1. Control scheme.
guarantees the exponential decay of theL2-norms ‖y(∙, t)‖2 and ‖yt (∙, t)‖2 of the solutions of(3.20–3.22).
Proof of Theorem3.1.Refer to the sliding variable dynamics (3.20) along with the BCs (3.22). The closed-loop sliding
variable dynamics is easily obtained by substituting (3.23) into (3.20), which yields
σt t = [ν2(ξ)σξ ]ξ − (W1 − θ1(ξ))σ − (W2 − θ2(ξ))σt − λ1σ
‖σ(∙, t)‖2− λ2
σt
‖σt (∙, t)‖2+ ψ. (3.25)
Consider the following Lyapunov functionalV(t):
V(t)=1
2‖√
W1 − θ1(ξ)σ‖22+ λ1‖σ‖2+
1
2‖σt‖
22 +
1
2‖ν(ξ)σξ‖
22+
1
2
ν2(0)
β0σ 2(0, t)+
1
2
ν2(1)
β1σ 2(1, t).
(3.26)
Its positive definiteness can be concluded by considering the first and the second tuning inequality(3.24), along with Assumption3.1, that imply the next conditions
W1 − θ1(ξ) > W1 −Θ1 > 0, W2 − θ2(ξ) > W2 −Θ2 > 0, ∀ ξ ∈ [0,1]. (3.27)
The time derivative ofV(t) is given by
˙V(t)=∫ 1
0(W1 − θ1(ξ))σσt dξ +
λ1
‖σ‖2
∫ 1
0σσt dξ +
∫ 1
0σtσt t dξ
+∫ 1
0ν2(ξ)σξσξ t dξ +
ν2(0)
β0σ(0, t)σt (0, t)+
ν2(1)
β1σ(1, t)σt (1, t). (3.28)
By evaluating (3.28) along the solutions of (3.25), it turns out after some simplifications that
˙V(t)= −∫ 1
0(W2 − θ2(ξ))σσt dξ − λ2‖σt‖2 +
∫ 1
0σtψ dξ +
ν2(0)
β0σ(0, t)σt (0, t)
+ν2(1)
β1σ(1, t)σt (1, t)+
∫ 1
0[ν2(ξ)σξ ]ξ σt dξ +
∫ 1
0ν2(ξ)σξσξ t dξ. (3.29)
The last term in the right-hand side of (3.29) can be integrated by parts, and taking into account thehomogeneous BCs (3.22) yields
∫ 1
0ν2(ξ)σξσξ t dξ = ν2(1)σξ (1, t)σt (1, t)− ν2(0)σξ (0, t)σt (0, t)−
∫ 1
0[ν2(ξ)σξ ]ξ σt dξ
−ν2(1)
β1σ(1, t)σt (1, t)−
ν2(0)
β0σ(0, t)σt (0, t)−
∫ 1
0[ν2(ξ)σξ ]ξ σt dξ,(3.30)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 13of 21
which leads to the next simplified form ofV(t):
˙V(t)= −∫ 1
0(W2 − θ2(ξ))σσt dξ − λ2‖σt‖2 +
∫ 1
0σtψ dξ. (3.31)
By employing the Holder integral inequality and Cauchy–Schwartz inequality (seeKrstic & Smyshlyaev,2008c), and taking into account (3.19), one derives that
∣∣∣∣∣
∫ 1
0σtψ dξ
∣∣∣∣∣6∫ 1
0|σtψ |dξ 6 ‖σt‖2‖ψ‖2 6 M‖σt‖2. (3.32)
Then,by (3.31) and (3.32) it follows that
˙V(t)6−(W2 −Θ2)‖σt‖22 − (λ2 − M)‖σt‖2, (3.33)
which implies, considering (3.24), that the Lyapunov functionalV(t) is a non-increasing function oftime, i.e.
V(t2)6 V(t1), ∀ t2 > t1 > 0. (3.34)
Denote
DR = {(σ, σt ) ∈ L2(0,1)× L2(0,1): V(σ, σt ) 6 R}. (3.35)
Clearly, by virtue of (3.34), taking anyR > V(0), the resulting domainDR will be ‘invariant’ forthe error system trajectories. Our subsequent analysis will take into account that the states(σ, σt ) belongto the domainDR startingfrom the initial timet = 0 on. Note that the knowledge of the constantR isnot required.
We now demonstrate a simple lemma that will be used along the proof.
LEMMA 3.1 If the states(σ, σt ) belongto the domainDR (3.35),then the following estimates hold:
‖σt‖22 6
√2R‖σt‖2, (3.36)
∫ 1
0σσt dξ > −
1
2
[R
λ1‖σ‖2 + ‖σt‖
22
]. (3.37)
Proof of Lemma1. Equation (3.36) comes from the following trivial chain of implications:
V(t) 6 R ⇒1
2‖σt‖
22 6 R ⇒ ‖σt‖2 6
√2R ⇒ ‖σt‖
22 6
√2R‖σt‖2. (3.38)
A similar procedure results in
V(t) 6 R ⇒ λ1‖σ‖2 6 R ⇒ ‖σ‖2 6R
λ1. (3.39)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

14of 21 Y. ORLOV ET AL.
By applying the well-known inequalityab> −12(a
2 + b2), it follows that
∫ 1
0σσt dξ > −
1
2[‖σ‖2
2 + ‖σt‖22] = −
1
2[‖σ‖2‖σ‖2 + ‖σt‖
22]. (3.40)
Beingcoupled together, relations (3.38–3.40) yield (3.37), which proves Lemma 1. �
Now consider the ‘augmented’ functional
VR(t) = V(t)+ κR
∫ 1
0σσt dξ +
1
2κR‖
√W2 − θ2(ξ)σ‖2
2
=1
2‖√
W1 − θ1(ξ)σ‖22 + λ1‖σ‖2 +
1
2‖σt‖
22 +
1
2‖ν(ξ)σξ‖
22
+1
2
ν2(0)
β0σ 2(0, t)+
1
2
ν2(1)
β1σ 2(1, t)κR
∫ 1
0σσt dξ +
1
2κR‖
√W2 − θ2(ξ)σ‖2
2, (3.41)
whereκR is a positive constant. In light of Lemma 1, functionVR(t) canbe estimated as
VR(t)>1
2(W1 −Θ1 + κR(W2 −Θ2))‖σ‖2
2 +(λ1 −
κRR
2λ1
)‖σ‖2
+1
2(1 − κR)‖σt‖
22 +
1
2‖ν(ξ)σξ‖
22 +
1
2
ν2(0)
β0σ 2(0, t)+
1
2
ν2(1)
β1σ 2(1, t). (3.42)
SinceW1−Θ1 > 0 andW2−Θ2 > 0,as previously noted, then, provided that the positive coefficientκR is selected sufficiently small according to
0< κR 6 min
{2λ2
1
R, 1
}
, (3.43)
the augmented functional (3.41) proves to be positive definite within the invariant domainDR, andit can be then used as a candidate Lyapunov functional to analyse the stability of the error dynam-ics. Let us compute the time derivative ofVR(t) alongthe solutions of (3.25). Simple manipulationsyield
VR(t)= −‖√
W2 − θ2(ξ)σt‖22 − λ2‖σt‖2 +
∫ 1
0σtψ dξ
+ κR‖σt‖22 + κR
∫ 1
0[ν2(ξ)σξ ]ξ σ dξ − κR‖
√W1 − θ1(ξ)σ‖2
2 − κRλ1‖σ‖2
−κRλ2
‖σt‖2
∫ 1
0σσt dξ + κR
∫ 1
0σψ dξ. (3.44)
Let us compute upperbounds to the sign-indefinite terms of (3.44). Equation (3.32) has previously beenderived, which is rewritten in a similar form with the signalσ replacingσt :
κR
∣∣∣∣∣
∫ 1
0σψ dξ
∣∣∣∣∣6 κR
∫ 1
0|σψ |dξ 6 κRM‖σ‖2. (3.45)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 15of 21
Apart from this, the next inequality can readily be derived by employing the Cauchy–Schwartz inequal-ity (seeKrstic & Smyshlyaev,2008c):
κRλ2
‖σt‖2
∣∣∣∣∣
∫ 1
0σσt dξ
∣∣∣∣∣6κRλ2
‖σt‖2
∫ 1
0|σσt |dξ 6
κRλ2
‖σt‖2
√∫ 1
0σ 2 dξ
√∫ 1
0σ 2
t dξ = κRλ2‖σ‖2. (3.46)
Then,by substituting (3.45) and (3.46) into (3.44), considering Assumption3.1 and noticing that theequality
κR
∫ 1
0[ν2(ξ)σξ ]ξ σ dξ = −
ν2(1)
β1σ 2(1, t)−
ν2(0)
β0σ 2(0, t)− ‖ν2(ξ)σξ‖
22 (3.47)
holdsdue to the BCs (3.22), the following estimate can be written:
VR(t) 6− (W2 −Θ2)‖σt‖22 − ρ‖σt‖2 − κR(λ1 − λ2 − M)‖σ‖2
− κR(W1 −Θ1)‖σ‖22 − κRΥm‖σξ‖
22 −
ν2(1)
β1σ 2(1, t)−
ν2(0)
β0σ 2(0, t), (3.48)
ρ = (λ2 − M − κR
√2R). (3.49)
Therefore,employing the parameter tuning conditions (3.24) and introducing one more restriction
κR 6 min
{2λ2
1
R, 1,
λ2 − M√
2R
}
(3.50)
aboutthe coefficientκR beyond (3.43), it readily follows that all terms appearing in the right-hand sideof (3.48) are negative definite. It can then be concluded that
VR(t) 6 −cR(‖σ‖2 + ‖σ‖22 + ‖σt‖2 + ‖σt‖
22 + ‖σξ‖
22 + σ 2(1, t)+ σ 2(0, t)), (3.51)
cR = min
{W2 −Θ2, ρ, κR(W1 −Θ1), κR(λ1 − λ2 − M), κRΥm,
Υm
β1,Υm
β0
}. (3.52)
Applying the Cauchy–Schwartz integral inequality and considering (3.39) yield
∣∣∣∣∣
∫ 1
0σσt dξ
∣∣∣∣∣6 ‖σσt‖1 6 ‖σ‖2‖σt‖2 6
R
λ1‖σt‖2. (3.53)
Now substituting (3.53) into (3.41) and upper-estimating further the resulting right-hand side in lightof Assumption3.1yield the next estimation
VR(t) 6 wR(‖σ‖22 + ‖σ‖2 + ‖σt‖
22 + ‖σt‖2 + ‖σξ‖
22 + σ 2(1, t)+ σ 2(0, t)), (3.54)
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

16of 21 Y. ORLOV ET AL.
wR = max
{1
2(W1 −Θ1 + κR(W2 −Θ2)), λ1,
1
2, κR
R
λ1,
1
2ΥM ,
ΥM
β1,ΥM
β0
}. (3.55)
Hence,the following differential inequality holds:
VR(t)6−c1VR(t), c1 =cR
wR> 0, (3.56)
therebyensuring the exponential decay ofVR(t) to zero. By (3.42) and (3.43), then it can be foundpR > 0 such that
VR(t) > pR(‖σ‖22 + ‖σ‖2 + ‖σt‖
22 + ‖σt‖2 + ‖σξ‖
22 + σ 2(1, t)+ σ 2(0, t)). (3.57)
It means that‖σ‖2, ‖σt‖2, ‖σξ‖2, σ 2(0, t) andσ 2(1, t) tendto zero exponentially ast → ∞. It re-mains to prove that theL2-normof the tracking errory(ξ, t) and that of its derivative tend exponentiallyto zero. To this end, note that the inequality
‖σ(∙, t)‖26 c2VR(t), c2 =2λ1
2λ21 − κRR
, (3.58)
is straightforwardly derived from (3.42), whereas, by (3.14), the spatiotemporal evolution ofy(ξ, t) isgoverned by
yt (ξ, t) = −cy(ξ, t)+ σ(ξ, t), c > 0. (3.59)
In (3.59), the sliding variableσ(ξ, t) can be viewed as an external driving input, exponentially decayingin L2-normaccording to (3.58). Computing the time derivative of the Lyapunov functionalW(t) = ‖y‖2alongdynamics (3.59) yields
W(t) = −cW(t)+1
W(t)
∫ 1
0y(ξ, t)σ (ξ, t)dξ. (3.60)
Since∣∣∣∣∣
∫ 1
0yσ dξ
∣∣∣∣∣6 ‖y‖2‖σ‖2 6 W(t)‖σ‖2, (3.61)
by combining (3.58), (3.60) and (3.61) it follows that
W(t) 6 −cW(t)+ ‖σ‖2 6 −cW(t)+ c2VR(t). (3.62)
It is now clear that relations (3.56–3.59), and (3.62), coupled together, ensure the exponential decay of‖y(∙, t)‖2 and‖yt (∙, t)‖2. Theorem 3.1 is thus proved. �
REMARK 3.1 The proposed dynamical controller (3.23) makes explicit use for feedback of the first- andsecond-order output derivativesyt (ξ, t) andytt (ξ, t), which might be not available for direct measure-ment. The problem of estimating the output derivatives by means of output measurement ofy(ξ, t) givenin real time is of great interest in itself. Possible solutions could be devised by suitably generalizing to
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 17of 21
the DPS setting some existing approaches to real-time differentiation such as the high-gain observers(seeDabroom & Khalil, 1999) or the sliding mode differentiators (seeLevant, 2003) and combiningthem with the suggested controller. In turn, the use of the state observers fromOrlov et al. (2004) couldallow one to successfully address the practically relevant case of the output feedback design. The carefulanalysis of these aspects is a challenging task which is beyond the scope of the present paper and it isgoing to be addressed in the context of next research activities.
4. Numerical simulations
For solving the PDEs governing the closed-loop systems, standard finite-difference approximationmethod is used by discretizing the spatial solution domainξ ∈ [0, 1] into a finite number ofN uni-formly spaced solution nodesξi = i h, h = 1/(N + 1), i = 1,2, . . . ,N. The valueN = 100has been used in the present simulations. The resulting 100th-order discretized system is imple-mented in Matlab-Simulink and solved by fixed-step Euler integration method with constant stepTs = 10−4s.
4.1 Reaction–diffusion equation
Consider the perturbed reaction–diffusion equation (2.1) with the spatially varying parameters given by
θ1(ξ)= 0.1 + 0.02 sin(1.3πξ), (4.1)
θ2(ξ)= 1 + 0.1 sin(3.5πξ), (4.2)
mixed-type BCs
Q(0, t)− α0Qξ (0, t) = Q(1, t)+ α1Qξ (1, t) = 20− 5π (4.3)
andICs
Q(ξ, 0)= 20+ 10 sin(6πξ). (4.4)
We choose the next spatially varying reference profile
Qr (ξ, t) = 20+ 5 sin(πξ), (4.5)
which meets the actual BCs. A spatially varying disturbance term is considered in the form
ψ(ξ) = 5 sin(2.5πξ). (4.6)
By (4.2), the boundΘ2M in (2.12) can be readily overestimated by anyΘ2M > 1.1. Then, the controllergains are set in accordance with (2.15) to the values
W1 = 20, λ1 = 20, W2 = 20, λ2 = 20. (4.7)
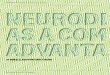
The left plot in Fig. 2 depicts the solutionQ(ξ, t), which converges to the given reference profile asconfirmed by the contractive evolution of the tracking errorL2-norm‖x(∙, t)‖2 shown in Fig.2 (right).Figure3 depicts the control inputu(ξ, t) which, as expected, appears to be a smooth function of bothtime and space. The attained results confirm the validity of the presented analysis.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

18 of21 Y. ORLOV ET AL.
FIG. 2. The solutionQ(ξ, t) (left plot) and the tracking errorL2-norm (right plot) in the controlled reaction–diffusion equation.
FIG. 3. Distributed control inputu(ξ, t) of the controlled reaction–diffusion equation.
4.2 Generalized wave equation
Consider the perturbed equation (3.1) with spatially varying parameters:
ν2(ξ)= 0.1 + 0.02 sin(2πξ), (4.8)
θ1(ξ)= −(1 + sin(1.2πξ)), (4.9)
θ2(ξ)= −(5 + 3 sin(3πξ)) (4.10)
and mixed BCs
y(0, t)− yξ (0, t) = y(1, t)+ yξ (1, t) = 0. (4.11)
The boundsΘ1 = 2,Θ2 = 8 to the uncertain system parameters (see Assumption 3.1) are taken intoaccount for the controller tuning. The ICs in (3.5) are set toϕ0(ξ) = 10 sin(6πξ), ϕ1(ξ) = 0. Thereference profile is set toyr (ξ, t) = 2 sin(πξ) sin(πt). The boundsH0 = 2, H1 = 6, H2 = 20, H3 = 3,H4 = 96 to the norms of its derivatives as in (3.11–3.12) are considered. The disturbance is set toψ(ξ, t) = 10 sin(5πξ)sin(2πt). The upperboundsΨ0 = 10 ,Ψ1 = 63 are considered in the restrictions(3.13).
The distributed sliding manifoldσ(ξ, t) has been implemented with the parameterc = 2. Pa-rameterM in (3.19) is chosen asM = 400. The controller parameters are set in accordance with
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMC DESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 19 of21
FIG. 4. Different views of the solutiony(ξ, t) of the controlled generalized wave equation.
FIG. 5. Generalized wave equation test. Left plot: distributed controlu(ξ, t). Right plot: tracking errorL2-norm‖y(∙, t)‖2.
(3.24) asW1 = 2, W2 = 10, λ2 = 500 andλ1 = 1000. Figure4 reports two different views ofthe solutiony(ξ, t). Figure5 shows the corresponding plots of the distributed controlu(ξ, t) and ofthe tracking errorL2-norm ‖y(∙, t)‖2. Good performance of the proposed control algorithm is con-cluded from the graphics that confirm the theoretical properties of the proposed distributed controller.The continuity of the applied distributed control input particularly follows from the inspection ofFig. 5 (left).
5. Concluding remarks
The ‘super-twisting’ and ‘twisting’ 2-SMC algorithms have been used in conjunction with linear PIand PD controllers, respectively, in a distributed system and control set-up. The two resulting schemeshave been applied to solve the tracking control problems for heat and wave processes subject topersistent disturbances of arbitrary shapes and with spatially varying uncertain plant parameters. Bymeans of appropriatead hocLyapunov functionals, the stability of the resulting error dynamics is
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

20of 21 Y. ORLOV ET AL.
proven in theL2-space.Along with this, the proposed infinite-dimensional treatments retain robust-ness features against non-vanishing matching disturbances similar to those possessed by their finite-dimensional counterparts. Finite-time convergence of the proposed algorithms, which would be the caseif confined to a finite-dimensional treatment, cannot be proved using the proposed Lyapunov func-tionals, and it remains among other actual problems to be tackled in the future within the presentframework.
Funding
European Union FP7 Research Network of Excellence ‘HYCON2—Highly complex and networkedcontrol systems’ (257462) to A.P., S.S. and E.U.
REFERENCES
ABRAMOWITZ, M. & STEGUN, I. A. (1964)Handbook of Mathematical Functions with Formulas, Graphs, andMathematical Tables. New York: Dover. Available online.
BARTOLINI , G., FERRARA, A., LEVANT, A. & U SAI , E. (1999) On second order sliding mode controllers.Variable structure systems, sliding mode and nonlinear control(U. Ozguner & Y. Young eds). Lecture Notesin Control and Information Science Series, vol. 247. Berlin: Springer, pp. 329–350.
BARTOLINI , G., LEVANT, A., PISANO, A. & U SAI , E. (2002) Higher-order sliding modes for output-feedbackcontrol of nonlinear uncertain systems.Variable Structure Systems: Towards the 21st Century(X. Yu& J. X. Xu eds). Lecture Notes in Control and Information Science Series, vol. 274. Berlin: Springer,pp. 83–108.
CHRISTOFIDES, P. D. (2001) Nonlinear and Robust Control of PDE Systems. Methods and Applicationsto Transport-Reaction Processes. Systems & Control: Foundations & Applications Series. Boston, MA:Birkhauser.
CURTAIN, R. & ZWART, H. (1995) An Introduction to Infinite-Dimensional Linear Systems Theory. Texts inApplied Mathematics. Berlin: Springer.
DABROOM, A. M. & K HALIL , H. (1999) Discrete-time implementation of high-gain observers for numericaldifferentiation.Int. J. Control,72, 1523–1537.
DEMETRIOU, M. A., I TO, K. & SMITH, R. C. (2009) Adaptive techniques for the MRAC, adaptive parameteridentification, and on-line fault monitoring and accommodation for a class of positive real infinite dimensionalsystems.Int. J. Adaptive Control Signal Proc., 23, 193–215.
FILIPPOV, A. F. (1988)Differential Equations with Discontinuous Right-Hand Side. Dordrecht: Kluwer.FRIDMAN , E. & ORLOV, Y. (2009) An LMI approach toH∞ boundarycontrol of semilinear parabolic and hyper-
bolic systems.Automatica, 45, 2060–2066.FRIDMAN , L. & L EVANT, A. (1996) Higher order sliding modes as a natural phenomenon in control theory.Robust
Control via Variable Structure and Lyapunov Techniques(F. Garofalo & L. Glielmo eds). Lecture Notes inControl and Information Science. Springer LNCIS Series, vol. 217. Berlin: Springer, pp. 107–133.
KHALIL , H. (2002)Nonlinear Systems, 3rd edn. Upper Saddle River, NJ: Prentice Hall.KRASNOSELSKII, M. A., ZABREIKO, P. P., PUSTILNIK , E. I. & SOBOLEVSKII , P. E. (1976)Integral Operators
in Spaces of Summable Functions. Noordhoff, The Netherlands: Leyden.KRSTIC,M. & SMYSHLYAEV,A.(2008a) Adaptive boundary control for unstable parabolic PDEs. Part I. Lyapunov
design.IEEE Trans. Autom. Control, 53, 1575–1591.KRSTIC, M. & SMYSHLYAEV, A. (2008b) Adaptive control of PDEs.Annu. Rev. Control, 32, 149–160.KRSTIC, M. & SMYSHLYAEV, A. (2008c) Boundary Control of PDEs: A Course on Backstepping Designs.
Advances in Design and Control Series. Philadelphia, PA: SIAM.LEVAGGI, L. (2002) Sliding modes in banach spaces.Differ. Integr. Equ., 15, 167–189.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from

2-SMCDESIGN FOR DISTRIBUTED PARAMETER SYSTEMS 21of 21
LEVANT, A. (1993) Sliding order and sliding accuracy in sliding mode control.Int. J. Control, 58, 1247–1263.LEVANT, A. (2003) Higher-order sliding modes, differentiation and output-feedback control.Int. J. Control, 76,
924–941.MORENO, J. & OSORIO, M. (2008) A Lyapunov approach to second-order sliding mode controllers and observers.
Proceedings of the 47th IEEE Conference on Decision and Control (CDC 2008), Cancun, Mexico, December2008, Piscataway, NJ: IEEE Inc., pp. 2856–2861.
ORLOV, Y. (2000) Discontinuous unit feedback control of uncertain infinite-dimensional systems.IEEE Trans.Autom. Control, 45, 834–843.
ORLOV, Y. (2005) Finite-time stability and robust control synthesis of uncertain switched systems.SIAM J. ControlOptim.,43, 1253–1271.
ORLOV, Y. (2009)Discontinuous Systems Lyapunov Analysis and Robust Synthesis under Uncertainty Conditions.Communications and Control Engineering Series. Berlin: Springer.
ORLOV, Y., LOU, Y. & C HRISTOFIDES, P. D. (2004) Robust stabilization of infinite-dimensional systems usingsliding-mode output feedback control.Int. J. Control, 77, 1115–1136.
ORLOV, Y., PISANO, A. & U SAI , E. (2010) Continuous state-feedback tracking of an uncertain heat diffusionprocess.Syst. Control Lett., 59, 754–759.
ORLOV, Y., PISANO, A. & U SAI , E. (2011) Exponential stabilization of the uncertain wave equation viadistributed dynamic input extension.IEEE Trans. Autom. Control, 56, 212–217.
ORLOV, Y. & U TKIN , V. I. (1987) Sliding mode control in infinite-dimensional systems.Automatica, 23, 753–757.PISANO, A., ORLOV, Y. & U SAI , E. (2011) Tracking control of the uncertain heat and wave equation via
power-fractional and sliding-mode techniques.SIAM J. Control Optim., 49, 363–382.UTKIN , V. I. (1972)Sliding Modes in Control and Optimization. Berlin: Springer Verlag.WANG, T. (1994) Stability in abstract functional-differential equations. II. Applications.J. Math. Anal. Appl., 186,
1835–1861.
at UniversitÃ
di Cagliari on O
ctober 5, 2012http://im
amci.oxfordjournals.org/
Dow
nloaded from