Embed Size (px)
Citation preview

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
1
ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
Sanja Bauk, D.Sc., Tatijana Dlabač, M.Sc., Radoje Džankić, Veljko Radulović University of Montenegro, Faculty of Maritime Studies, Dobrota 36, 85330 Kotor,
Montenegro, [email protected]
ABSTRACT
In the paper some IT functions of Transas NTPro - Navi-Trainer Professional 4000 (version 6.42) navigational simulator, being intended for the education of students of nautical studies and training of future seafarers, shall be described in more details. Some of the key functions of main control panel, Radar (Nucleus_2 type), and electronic charts (ECDIS-Electronic Chart Display and Information System) have been scanned and explained. In particular, in the article will be presented the procedure for the realization of "person over board" (POB) command through three different types of maneuvers: Williamson turn, Scharnow turn, and Single turn. The required times for realization of these three maneuvers, upon two different types of ships (a passenger ship, and a very large cargo carrier) will be examined in aim to notice the (dis)advantages of each examined maneuver. Here realized simulations should provide the contribution toward uprising the level of awareness that navigational safety system is usually endangered by shortages in standard maneuvering booklets, and that some additional attempts are to be done in aim to provide the navigators in the future with dynamic situation-dependant maneuvering data by taking into account actual environmental conditions and actual ship status information. Within the paper some advanced IT functions of NTPro simulator are also mentioned.
Keywords: NTPro simulator main functions, POB, maneuvers, simulations
1 INTRODUCTION
Since we are in the era of cloud computing, or pervasive computing, essentially we have less and less insight of all that computers do and how they actually operate, since they are simply built into the “things”. Such is the case with modern command bridges of the ships. In almost all navigational devices are embedded computers, or CPUs, which form their core. This is IT break through the maritime navigation, which is more obvious in the case of the nautical simulator. Everything in nautical simulator is actually based on the computer programs, and everything happens in a complex, highly sophisticated IT environment [1;2]. In this paper, from the user point of view, some of the basic functions of the main or central management console nautical simulators, Radar of Nucleus_2 type, and ECDIS are described. POB, supported by ECDIS, has been analyzed in some more detail, as well. Since this is a very complex simulator, there are a number of its IT functions that are not described here, and will be subject to further research in this area by the authors.
2 THE MAIN NAVIGATIONAL CONSOLE
Navi-Trainer Professional 4000 nautical simulator, or, NTPro shortly, manufactured by the Transas Marine, appeared on the market in the late 90s of last century, along with the commercialization of Windows NT environment, and in accordance with the relevant recommendations of the STCW Convention. It is intended for the training of candidates (seafarers) in the areas of optimal control of ship quidance and maneuvering [10-14] The

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
2
main control console, which is actually a simulacrum of the command bridge on a ship, comprising: a central control panel, Radar, ECDIS, AIS, GPS, NAVTEX, GMDSS, the alarm system on board, and other auxiliary navigation devices, which are all integrated [8;9]. Figure 1 gives a schematic representation of the navigational equipment of the simulacrum of the command bridge on the ship. Though, the block diagrams in Figure 1 shows the two-way communication flow between the main control panel, Radar and ECDIS, and additional navigation and alarm devices, including, today inevitable AIS (Automatic Identification System), which is integrated with both Radar and ECDIS.
Figure 1: Block scheme of the main console of NTPro simulator
3 THE CONTROL PANEL
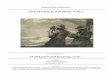
The main control panel of NTPro nautical simulator has several displays (screens) through which one can obtain information regarding: help desk, pilot card, auto pilot, depth sounder, lights and sound signals, gyro compass, alarm, anchoring, berthing, etc. Figure 2 presents a window with basic controls directly related to the steering of the ship, including visualization, basic indicators of external environmental factors (wind, currents, depth below the keel), course over ground and through the water, the speed of the bow, at the middle and at the stern of the ship, speed of rotation of the propeller, rudder turning ratio, etc. The functions indicated in Figure 2 are as follows: 1-view direction indicator, 2-ship’s speed (bow, medium, stern), 3-angle of elevation (i.e. the angle of view due to the vertical axis), 4-compass and winds directions; 5-course from the gyro compass (digital indicator); 6-autopilot, manual steering, or by using the pumps’ system (the case when the rudder fails) 7-rudder (the given rotate command and actually rotate) 8-fine control of the main engine power; 9 - virtual machine telegraph; 10-digital pointer of propeller speed per minute (RPM-rate per minute), 11-setting monitor brightness (adjustment of the operation in night conditions), 12-command buttons to display other screens (help, turning circles of the ship, auto pilot, echo sounder, light and sound signals, gyro compass, alarm system, anchoring and berthing, tides, etc.), 13-pump generator system, 14-start and stop the main engine, 15-indicator of propeller number of revolutions per minute, 16-current direction (°), and speed (knots), 17-wind direction (°), and velocity (m/s).

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
3
Figure 2: Some IT functions of the main control panel
4 RADAR DISPLAY (NUCLEUS_2)
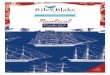
In order to illustrate basic Radar functions more vividly, Radar display NTPro Nucleus_2 Radar simulator is divided into zones with marked and explained different functions (Figure 3). Thus, the marked zones in Figure 3 correspond to the following:
• Zone 1: 1-selection of the Radar system ("X band", or "S band"), 2-short (SP - Short Pulses), medium (MP - Medium Pulses), or long pulse (LP - Long Pulses) mode, 3-tunning Radar transmission frequency, 4-correlation and interference rejection, reduction and cleaning receiver noise (commands are given by mouse keys L-off, S-1, D-2; while no. 1 and 2 show the respective degrees of those adjustments).
• Zone 2: 5 - Radar on/off commands, 6-Radar range and rings adjustment/view, 7-optional: Head-up (HU), North-up (NU), or Course-up (CU) the Radar picture (i.e. various orientation of viewing the position of the own ship), 8-optional: relative motion (RM)-it is a motion by which what it is essentially not moving, it is moving (virtually) by the same speed as own ship does, while the own ship is fixed in the center of the screen; or, true motion (TM)-it is a movement in which the object moving, is moving by the relative speed that is equal to the vector sum of the speed of own ship and the speed of that object; 9-displaying head line (i.e. enabling or disabling this option).
• Zone 3: the own ship plotting parameters, trace parameters of the ship; CPA-Critical Point of Approach (by the arrival to the CPA, the alarm system is automatically

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
4
activated); TCPA-Time to Critical Point of Approach (time until the alarm activation at the CPA); trails-traces of the ship (necessary for ARPA, as a glance into on the future due the past states, though the traces are very important for the safety of navigation).
• Zone 4: 10-range changes (VRM-Variable Range Marker) ; 11-azimuth line (EBL-Electronic Bearing Line); 12-gain, anticlattering Rain, anticlattering Sea, i.e. removal or mitigation of Radar noise caused by the storm, or waves.
• Zone 5: data on targets; menies: WAY Pt, NAV, PLOT, MAPS, TRIAL, CRT (which are not always available).
• Zone 6: commands generated by left (L), medium (M) and right (R) mouse click, and enabling reading of parameters that correspond to the current cursor position on the display.
Figure 3: The zones and basic commands of Radar (Nucleus_2) simulator display
5 THE ECDIS SIMULATOR
The ECDIS is an electronic navigation system that integrates real-time navigational data from ship sensors (GPS, Radar, AIS, etc.) and electronic navigational charts (ENCs-Electronic Nautical Charts). The International Maritime Organization (IMO) adopted it as the equivalent of classical paper charts in November 1995. Nevertheless, the transition to its full usage in practical maritime navigation is very slow. The causes are the lack of the official ENCs, the high cost of ECDIS, and dose of reserve in accepting this new technology by the

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
5
traditional marine community. However, ECDIS has benefits in terms of time savings in route planning and monitoring, preventing accidents and though protecting the ship and marine environment. About 80% of reported accidents at sea are caused by human errors, which are again a consequence of fatigue, extensive work in navigation and others. Number of accidents at sea could be reduced by the introduction of electronic navigation systems, since they would help in mitigating the navigator fatigue and/or stress. The ECDIS is, therefore, advanced IT tool that allows navigation during all 24 hours monitoring the position and collision/grounding avoidance. These functions can be used effectively in restrictive waterway areas, especially during periods of poor visibility, i.e. under conditions of mist and during the night. The DGPS (differential GPS) is crucial in a way that it complements the ECDIS, through the provision of continuous and accurate positioning of the ship [4;6;15]. Figure 4 shows the main segments of the ECDIS NTPro display.
Figure 4: The ECDIS main display segments: 1-the electronic chart area (vector map); 2 - tab control which allows choice between displaying one or two chart areas on the screen (options:
main and dual); 3-control panels arranged in several layers One of the major problems that prevent wider use of ECDIS is the lack of the official ENC covering the main routes and ports in the world. Otherwise, reasons for concern when using non-official electronic charts are the quality of the source material, data and their updates. Some hydrographical organizations have problems in creating ENC that are consistent with the IHO S57 standard, due to the lack of experts’ knowledge in this area, as well as the lack of finances. Therefore, some HOs expressed concern about the slow development of mechanisms for creating, distributing and updating the ENCs. With the development and implementation of ECDIS, one of the main goals is to improve communication between the hydrographic organizations, ECDIS manufacturers and end users, primarily seafarers. HOs should invest in making a constant effort in creating the official standardized ENCs. Some of the IT functions (controls) of the NTPro ECDIS are given and described in Table 1.

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
6
Table 1: Some visualized commands of ECDIS and their brief description
Control Description Control Description
“Ahead” - Returns to the screen such that it is always possible to see the own ship
“Zoom out” - Button (command) to reduce the map view in relation to a fixed (predefined) scale
“Move ship symbol” - The relative position of own ship due the cursor position
“Original scale” - Button (command) that is used to display the map in the original (fixed, or predefined) scale
“North up” view - Actual position of the ship on the map in relation to the north, where the north is marked with N↑
“Info” - Button (command) to "call" for the information on the number of cards from a particular collection
“Head up” view - In this view, own ship head line is set to the north on the map (at 0%)
“HCRF review” - Serves to show the format of the HCRF map
“Course up” view - In this view, own ship head line is directed to the north, but instead of 0 ° (in the case of "Head up" display), the actual course of the ship is showen (e.g. 140 °)
“POB” - button (command) to make a “person overboard” alert, so the navigator automatically directed the ship afterward, through the appropriate maneuver (Williamson, Scharnow, or Single turn), toward the position where the alarm is activated
“Relative motion” - Display relative motion, by which: what is essentially not moving, it is moving by the speed of our own ship, while the own ship is “fixed”
“Auto zoom” - Button (command) that allows operator to return to the auto-zoom feature
“True motion” - show the actual movement, in which: a moving object is moving by the relative speed, which is the vector sum of the own ship speed and the speed of that object
“Tile horizontal” - Button (command) that allows the sharing of views on the main screen in two parts, i.e. horizontal division into two screens, where one always provides the visibility of the own ship, and the other allows following the situation in the wider environment
“Zoom in” - Button (command) to zoom the map in relation to a fixed (predefined) scale
“Tile vertical” - button (command) that allows the sharing of views on the main screen in two parts, i.e. vertical distribution into two screens, where one always provides the visibility of the own ship, and the other allows following the situation in the wider environment
5.1 The ECDIS POB alert and the following maneuvers
One of the alerts (alarms) in ECDIS which deserves special attention is certainly a “person overboard” one. When the alarm is activated, at the ECDIS display will automatically appear the sketch a figure in order to support returning the ship to the position in which it was at the time of alarm activation. In this context it is to be pointed out that compared to groundings and collisions, person overboard accidents are rarer events but in terms of risk assessments have much greater consequences. A person overboard is a situation in which a person has fallen from a ship into the water and is in need of rescue. This accident requires immediate decision making and prompt action. Every second is important and influences the success of the action to rescue the person overboard. However, there is no standard procedure recommended, as the effectiveness of maneuver depends on the type of ship and prevailing

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
7
hydrodynamics and environmental conditions. Three most commonly used return maneuvers are:
• Williamson turn: not the best option in most cases; • Scharnow turn: the best option if the accident was noticed after certain time; and, • Single turn: the best option if the accident was noticed immediately [3].
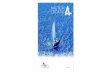
The snapshots of these return maneuvers in the case of POB accident are given in Figure 5.
Figure 5: Three most commonly used returned turns in the case of POB accident Here are examined all three above listed maneuvers, at NTPro simulator, over two types of ships: a passenger ship, and a very large cargo carrier ship. By the realization of three previously mentioned return maneuvers, it is concluded that in both cases the most suitable reaction option is: Single turn, then Scharnow turn, and at the last Williamson turn. The required time intervals for realization of these three maneuvers are given in Table 3 for both examined ships. The planning of these maneuvers with the objective to turn the ship and stop it at the position of accident is more difficult because of individual turning and stopping characteristics of ship. Though, the investigations into the overall situation regarding onboard maneuvering assistance and into the integration of new maritime technologies onboard ships are performed. For these purposes, the introduction of a dynamic electronic wheelhouse poster and electronic maneuvering booklet is suggested, in order to provide up-to-date information about the maneuvering characteristics of the ship, adapted to the prevailing actual environmental conditions [5].

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
8
6 SOME ADDITIONAL NTPro IT FUNCTIONS
Besides the basic functions of the NTPro simulator, which are implemented via the main control panel, Radar and ECDIS, it is possible to upgrade the simulator entire range with the advanced navigation features, supported by the appropriate IT tools. The advanced IT capabilities, compared to the standard NTPro navigational simulator, include the following features: modeling of different types of ships; creating new areas of navigation (in addition to the main ones being stored in the simulator memory); automatic creation of 3D surface of the underwater terrain and navigation marks in a particular area of navigation; installing the navigational device which integrates IT monitoring and controlling the engine complex operations; realizing a very realistic simulation of communications and cooperation with VTS (Vessel Traffic Service) center on the land side (during anchoring, berthing, docking, or sailing in restrictive waters); realizing a very realistic simulation of communications and actions in accordance with the recommendations of the center for controlling the spread of oil spills on the land side; creating very realistic models of military ships and advanced features being addressed to resolving the naval strategic tasks at sea, etc. It is important to emphasize that every Transas simulator is modular, which means that if there is a need, they can be relatively easy upgraded by the previously listed functions, or some of them.
Table 2: Required time intervals for realization of different types of return maneuvers in the
case of POB accident
Turn / Ship Passenger ship (31 085 DWT) VLCC ship (159 583 DWT)
Position: Lat. 49 10.869 N Lon. 009 54.831 W
Position: Lat. 49 06.745 N Lon. 009 43.598 W
1. Williamson turn
Time: 18 min 02 sec Time: 20 min 11 sec Position: Lat. 49 11.424 N Lon. 009 54.831 W
Position: Lat. 49 11.037 N Lon. 009 54.829 W
2. Scharnow turn
Time: 8 min 11 sec Time: 14 min 20 sec Position: Lat. 49 11.084 N Lon. 009 54.830 W
Position: Lat. 49 06.488 N Lon. 009 43.596 W
3. Single turn
Time: 7 min 22 sec Time: 11 min 11 sec
7 CONCLUSIONS
Based on the paper’s outlined view of the structure of the key components of NTPro nautical simulator, as well as some of its basic navigation functions, it is clear that this is a very complex and sophisticated IT tool. The simulator is primarily aimed to educating students of nautical and marine sciences, as well as to training and acquisition of the title of seafarers in accordance with current requirements of the STCW Convention. What should be improved in the use of this, or similar simulators, within the framework of our national educational system is communication between experienced sailors (active captains), i.e. connoisseurs of classical navigation [7], connoisseurs of methods of operation and performances of IT tools, researchers in the domain of the theoretical navigation, the

Sanja Bauk, Tatijana Dlabač, Radoje Džankić, Veljko Radulović ON SOME NTPro NAUTICAL SIMULATOR IT FUNCTIONS AND POB MANEUVERS
9
simulator instructors, and the students (candidates). These communications are currently the most vulnerable link in the chain of virtual-real education and training for future seafarers. Often the presence of intolerance among experts involved in education and training of new generations of sailors represents the main obstacle for more intensive use of sophisticated simulators, and thus the quality of knowledge transfer and implementation, at least in such virtual domain devoted to obtaining basic navigational knowledge and skills. Also, the discontinuity in communication with the authorized distributors and repairers of Transas sophisticated IT equipment, is one of the problems in more successful use of this powerful tool intended for research, and education/training of students, future seafarers.
REFERENCES
[1] Bauk S., Dlabač T., “Information-communication Tools in Seamen Training at the Examplar of Navi-Trainer Simulator”, XVI IT Conference, Žabljak, Montenegro, 2011. (CD issue)
[2] Bauk S., Dlabač T., Radulović V., “On Some IT Functions of Navi-Trainer Nautical Simulator”, XVII IT Conference, Žabljak, Montenegro, 2012. (CD issue)
[3] Benedict K., Fischer S., Gluch M., et al., “Fast Time Simulation Technology for Investigation of Person over Board Manoeuvres for Improved Training and Support for Application Onboard”, International Conference IMLA 19, Opatija, Croatia, 2011, pp. 71-84
[4] Hech H., et al., The Electronic Chart, Fundamentals, Functions, Data, and other Essentials, Geomares Publishing, 2011.
[5] International Maritime Organization, “Development of Model Procedure for Executing shipboard Emergency Measures”, STW 41/12/3, London, 2009.
[6] Mulloth A., Safe Navigation with Electronic Chart Display and Information System (ECDIS) Handbook, Cengage Larning Asia, 1st Edition, 2011.
[7] Simović A., Terestrička navigacija, 6. izdanje, Školska knjiga, Zagreb, 2001.
[8] Tetley L., Calcutt D., Electronic Aids to Navigation, 2nd Edition, Elsevier, Lightning Source UK, Ltd., 1988.
[9] Tetley L., Calcutt D., Electronic Navigation Systems, 3rd Edition, Elsevier, Lightning Source UK, Ltd., 2004.
[10] Transas, Navi - Sailor (ver. 3.2), User Manual, 2nd Edition, Transas Marine GB, Ltd., 2000.
[11] Transas, Navi – Trainer 4000 (ver. 4.50), Navigational Bridge, Transas Marine GB, Ltd., 2004.
[12] Transas, Navi – Trainer 4000 (ver. 6.42), Instructor Manual, Transas Marine GB, Ltd., 2007.
[13] Transas, Navi – Trainer 4000 (ver. 6.42), Navigational Bridge, Transas Marine GB, Ltd., 2007.
[14] Transas, Navi – Trainer 4000 (ver. 6.42), Technical Description and Installation Manual, Transas Marine GB, Ltd., 2007.
[15] Weintrit A., The Electronic Chart Display and Information System (ECDIS): An Operational Handbook, Faculty of Navigation, Gdynia Maritime University, Poland, CRC Press, 2009.