Embed Size (px)
DESCRIPTION
Journal of Telecommunications, ISSN 2042-8839, Volume 19, Issue 2, April 2013 www.journaloftelecommunications.co.uk
Citation preview

JOURNAL OF TELECOMMUNICATIONS, VOLUME 19, ISSUE 2, APRIL 2013 23
On solving the local minima problem of blind adaptive MIMO equalization
Y. BEN JEMAA and M. JAIDANE
Abstract— We consider in this paper the problem of blind MIMO-FIR channel equalization in a real context of digital transmission where the input data belongs to a finite alphabet set. A non linear equalizer with a Volterra structure is considered. A rigorous analysis using the classical approaches is difficult due to the non-linearity of the equation that governs the equalizer. Through a novel finite alphabet approach that we propose, we demonstrate that the problem of local minima is avoided when using, for adaptation, a particular family of algorithms including classical ones such as LMS. This was proven rigorously without using any assumptions in a digital transmission context when the input remains to a finite alphabet set.
Index Terms—Blind MIMO Equalization, Volterra structure, Adaptive algorithms, Local minima
—————————— u ——————————
1 INTRODUCTIONlind MIMO (Multiple Input Multiple Output) equali-‐‑zation is of an increasing interest research topic in many fields such as new digital communications
standards and multi-‐‑sensors applications [1][2]. MIMO channel inversion in a blind way -‐‑without any training input sequences-‐‑is a generic and difficult problem. Many works have been carried in blind SISO (Single Input Sin-‐‑gle Output) and recently for blind MIMO equalization [3] [4] [5] [6] [7]. However, to our knowledge, no exact theo-‐‑retical analysis in a real digital communication system -‐‑when the inputs remain to a finite alphabet set and the equalizer is a finite impulse response filter-‐‑is made. In particular, the convergence towards local or global mini-‐‑ma is not well investigated. Many blind adaptive algo-‐‑rithms have been proposed for SISO and MIMO equaliz-‐‑ers [8] [9] [10] but without being confident on that they avoid local minima. A quadratic minimization criterion associated with a non linear equalizer structure seems to be a solution for non minimum phase channel equaliza-‐‑tion to avoid ill convergence but no exact theoretical analysis allowed to verify it. While a DFE (Decision Feedback Equalizer) suffers from possible error propagation, a Volterra structure can be used in this case for equalization.
In this paper, an exact performance analysis of MIMO blind equalizer is presented using a powerful tool dedi-‐‑cated for the digital context. Even if this finite alphabet approach is not dedicated to a quantitative analysis [11][12], we can deduce powerful qualitative results. In particular, using this exact analysis, we prove the absence of local minima for blind MIMO Volterra equalizers adapted by a specific family of algorithms. This is made for minimum or non minimum phase MIMO FIR chan-‐‑nels. In order to assess such results, this paper is organized as follows: in section 2, we describe the MIMO FIR chan-‐‑nel/adaptive equalizer. In section 3, we present the finite alphabet approach tailored for digital transmission con-‐‑text; we use this approach to give an exact convergence analysis of this blind MIMO equalizer. In section 4, we prove that the MIMO adaptive Volterra equalizers con-‐‑verge to unique minima and then the problem of ill-‐‑convergence is avoided for this family of Blind MIMO Volterra adaptive equalizers.
2 MIMO SYSTEM MODEL AND EQUALIZATION STRATEGY
2.1 MIMO FIR Channel / Adaptive non-linear Equalizer model
Let us consider an M-‐‑input N-‐‑output Finite Impulse Filter (MIMO FIR) communication system as depicted in figure1.
B
———————————————— Y.Ben Jemâa is with the NationalEngineering School of Sfax , BP 1173 3038, Tunisia and Signals and Systems laboratory; M. Jaidane is with the National Engineering School of Tunis, Le belvedere1002, Tunisia and Signals and Systems laboratory;
© 2013 JOT www.journaloftelecommunications.co.uk

24
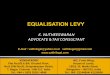
Fig. 1. Noiseless MIMO system and adaptive blind equalizer The MIMO channel is assumed to be noiseless, linear, with memory and block-‐‑time-‐‑invariant. The channel out-‐‑put signal sampled at the symbol rate at time n can be modeled as:
Xn = F An (1)
Where Xn =[x1[n], x2[n],..., xN [n]]T is the received signal at time n, An =[a1[n],a2[n],...,aM[n],a1[n−1],a2[n−2],...,aM [n−L+1]] is the transmitted signal, L is the channel memory length and F is the channel matrix with dimension N × (ML). All inputs {an} remain to the same finite alphabet set (for ex-‐‑ample {±1}, {±1, ±j}...) such as QAM, PSK signals depend-‐‑ing on the modulation. For demonstration purpose, equa-‐‑tion (1) will be rewritten as follows in order to separate the memory less information that must be estimated at the receiver from the remaining information (with memory): Xn = JF Bn + CF Dn (2) Where Dn =[d1[n], d2[n],..., dM [n]]
T, Bn=[a1[n],a2[n],...,aM[n]]T ,
di[n]=[ai[n−1], ai[n−2],..., ai[n−L+1]]T , JF and CF define the channel matrices with JF is a constant matrix with dimen-‐‑sion N×M and CF with dimension N× M(L − 1) (F =[JF, CF]). Matrix CF can be easily determined from matrix F and it contains all channel information.
2.2 Blind MIMO Equalizer In cases of non minimum phase channel, the linear equal-‐‑izer doesn’t perform well (see for example [13]). To over-‐‑come this limitation, non linear filters are used in order to identify the system parameters. Because Volterra series can completely describe the input and output transfer characteristic of a large type of non linear system, the
Volterra adaptive filters have been widely applied in sev-‐‑eral important applications. In particular, adaptive Volterra filters have been developed for channel iden-‐‑tification and equalization [14][15]. If we consider the MIMO Volterra structure of order v and memory length p, the relationship between the kth
output yk[n] and the input is given, in the discrete time case, by the following equation [16]:
(3)
(3)
where hkj1, j2,..,ji denotes the coefficients of the order Volter-‐‑ra kernel and hk0 is the statistical characteristic corre-‐‑sponding to yk[n]. This equation can be described by a matrix form as follows:
Yn = JHXn − HnVn (4)
where
Vn=[x1[n−1], ·∙·∙·∙, xN[n−1], ·∙·∙·∙, xN[n−p+1], x1[n]2, ·∙·∙·∙, xN[n]2,
x1[n]x1[n−1], ·∙·∙·∙,xN[n−p+1]v]T
is a vector depending on the non linearity degree of the system, Yn =[y1[n], y2[n],..., yM [n]]T , Hn is the estimated parameters matrix of the equalizer with dimension M× Nβ (β = ∑ Ci
p+i-‐‑1 where Ci
j is the number of combinations of i
objects from j objects) and JH is a constant matrix with dimension M × N
2.3 The adaptive algorithm family The Bussgang algorithms and the higher order statistics based algorithms are the mostly used in blind equaliza-‐‑tion. These algorithms have local minima due to a non convex cost function [4][6]. In order to avoid this prob-‐‑lem, we shall propose a family of algorithms to update the Volterra equalizer. These algorithms are described by the following recursion:
Hn+1 = Hn + µμYn f (VnH )
Yn = JHXn – HnVn (5) Where Hn is the matrix equalizer and µμ is a positive step size. Function f allows to choose the adaptive algorithm. There are no specific conditions on this function. Note that the particular case, when the function f is the identity corresponds to the minimization of a quadratic cost function based on the energy of the output equalizer vector Yn such as Jn = E(||Y n ||2), where E(.) denotes the statistical expectation operator. The adaptive algorithm used to update the equalizer in

25
this case is the LMS algorithm. According to equations (2) and (5), the adaptation is governed by the following re-‐‑cursion: Hn+1 = Hn + µμ (JH(JFBn + CFDn) − HnVn) f (Vn
H ) (6)
We will study the statistical convergence of this recursion in terms of initial conditions in order to analyze the ill -‐‑convergence problem.
3 LOCAL MINIMA ANALYSIS BY FINITE ALPHABET APPROACH
In order to study the statistical convergence of the algo-‐‑rithm, we describe the Volterra equalizer behavior, in the mean sense, by the following recursion obtained from equation (6): E(Hn+1) = E(Hn)+ µμ E((JH (JF Bn + CF Dn) − HnVn) f (Vn
H ))
= E(Hn(I −µμVn f (Vn H )))+µμE(JH JF Bn f(Vn H)+JH CF Dn f(Vn H ))
(7) Since Vn and Hn are dependent, it is difficult to solve equa-‐‑tion (7) [17]. To overcome this difficulty, we here propose to apply an original approach based on the finite alphabet input characteristics [18]. This allows us to deduce results about the behavior of the equalizer. Especially, we will answer to the following question: can we solve the prob-‐‑lem of convergence towards local minima with the pro-‐‑posed algorithms family? 3.1 The Finite Alphabet formulation In digital transmission context, the input sequence {an} remains in a finite alphabet set {d1,d2, ..., dq}, for example {±1}, {±1, ±3} such as QAM or PSK signals... The main idea of the proposed convergence analysis is to express vector Vn with the input sequence {an} and then to reformulate, in a compact form, equation (7). Through this exact reformu-‐‑lation, all convergence results are deduced, in particular, the unicity of the blind MIMO equalizer convergence. The vector Vn can be writhen as:
Where F =[JF, CF] is the channel matrix with dimension N×ML, An = [Bn
T ,DnT ]T , Ai,j = AiATj and Oi=[0, ·∙·∙·∙ , 1, ·∙·∙·∙ , 0, ·∙·∙·∙]
is a N length vector of zeros except the ith element which is equal to 1. So, we have: Vn = F An (9) The vector An remains to a finite alphabet set A={ W1, W 2, ..., W N } of cardinality N = q
MLp.
Consequently, Vn remains in a finite alphabet set which depends on the alphabet of the input and the channel parameters. Since the input sequence is stationary, it can be modeled by a discrete Markov chain {θ(n)} with finite state space {1, 2, ..., N } [19]: An = W θ(n) (10)
This Markov chain is characterized by its probability transition matrix P =[ Pij] and its stationary probability vector π(∞). It is important to note that with this formula-‐‑tion we can consider a non-‐‑equiprobable input sequence such as a particular channel encoder output. In the same way, Bn and Dn can be expressed with the vector An: Bn = U An Dn = V An (11) where U =[IM , O,...] and V =[O ... IM(L−1), O,...] Where O is a matrix of zeros and I is the identity matrix. Using these notations, equation (9) and equation (11), we can rewrite equation (7) as: E(Hn+1) = E(Hn (I − µμ F An f (An
H F H )))
+ E(µμJH JF U An f(An H F H
)+ µμJHF V An f(An H F H
)) (12)
According to the finite alphabet model and the following notations: Mn = I − µμ F An f (An
H F H )
Zn = µμJH JF U An f(An H F H
)+ µμJHF V An f(An H F H
)

26
the recursion (12) describing the adaptive Volterra equal-‐‑izer mean behavior adapted by a general family of algo-‐‑rithms becomes: E(Hn+1) = E(Hn Mn)+ E(Zn) (13)
3.2 The proposed idea The finite alphabet approach consists, since there is N possibilities of Wθ(n), in splitting the vector E(Hn) in N components defined by : qj(n)= E(Hn 1θ(n)=j) (14) Where 1θ(n)=j is the indicator function. So, we can rewrite E(Hn) as follows : E(Hn) = qj(n) (15) Each component of E(Hn) is governed by the following recursion: qi (n +1) = E(Hn+11θ(n+1)=i 1θ(n)=j ) (16) According to equation (13), we have: qi (n +1) = E(Hn Mn 1θ(n+1)=i 1θ(n)=j)+E(Zn 1θ(n+1)=i 1θ(n)=j)
(17) Since Mn and Zn remain also in a finite alphabet sets with cardinality N and they are respectively {M1, M2, ..., MN
} and { Z1, Z 2, ..., ZN
} with : M i = I − µμ F W i f (W i
H F H )
Z i = µμJH JF U W i f(W i H F H
)+ µμJHF V W i f(W i H F H
) (18)
We have then: qi (n+1) = E(Hn 1θ(n+1)=i 1θ(n)=j )M j +Z j E(1θ(n+1)=i 1θ(n)=j ) (19) Since the input is characterized by a Markov chain, we have: E(Hn 1θ(n+1)=i 1θ(n)=j ) = P ji E(Hn 1θ(n)=j ) = P ji qi (n) E(1θ(n+1)=i 1θ(n)=j ) = P ji πj(∞) (20) Hence,
qi (n +1) = qi (n) M j P ji + Z j P ji πj(∞) (21) In order to rewrite (21) in linear form, we introduce the useful notations:
q~T (n) =[q1T(n), q2T(n), ..., q N
T(n)]T ,
Z˜(n) =[ Z1 ‘T
, Z2 ‘T
, ..., Z N
‘T ]T
where Z i
‘T= Z j P ji πj(∞) Referring to [20] in order to use Kronecker product prop-‐‑erties, we can write: q˜(n +1) = Γq˜(n)+ Z˜
Γ = (P T ⊗ I) diag ((I − µμ F * Wi
* f(Wi H F H )*) ⊗ I)
(22) This elegant, compact, linear and deterministic equation will replace the classical intricate convergence equation (7). From (22), we will deduce all system performances. In fact, the matrix Γ contains all relevant information about the Volterra equalizer. The matrix Γ, which completely governs the quantity q˜ then E(Hn) depends explicitly and simply on the finite alphabet input through the alphabet Wi and the transition matrix P, the MIMO channel through matrix F and the family algorithms through func-‐‑tion f(.). Since the recursion (22) is linear and the matrix is con-‐‑stant and depends only on the step size and the input statistics, statistical convergence of the algorithm and the possible local minima problem of the blind adaptive MIMO equalizer depend only on the eigenvalues of ma-‐‑trix Γ.
4 EXACT ANALYSIS OF BLIND ADAPTIVE MIMO VOLTERRA EQUALIZER: CONVERGENCE WITHOUT LOCAL MINIMA
Referring to the equation (22), a critical step size µc exists and it verifies [2]: If µμ ≤ µμc then, all the eigenvalues of matrix Γ are less than 1 and the algorithm converges in the mean sense [19]. The critical step size is deduced by the analysis of the Γ eigen-‐‑values as a function of µμ. If the convergence condition is satisfied, we determine the
(23)

27
steady state performances (n →∞) by: q˜∞ = (I − Γ)-‐‑1 Z˜ (24)
Since quantities Γ and Z˜are constants, the value q˜∞ is unique. We can then deduce that the matrix equalizer Hn converges in the mean sens to a unique value H∞ defined as: H∞ = qj (∞) (25) where qj (∞) are the components of vector q˜∞. This important result confirms the absence of local mini-‐‑ma of the proposed algorithm family. The result already demonstrated is presented in the following proposition. 4.1 Proposition The Let consider a MIMO linear with memory and block-‐‑time invariant channel which is blindly equalized using a MIMO adaptive Volterra equalizer and adapted using a new proposed family of algorithms described by the equation (5). If the step size used for adaptation is less than a critical step size defined by equation (23), the algorithm converges in the mean sense to a unique value and the problem of local minima is avoided. This is valid for any finite alphabet although asymmetric or non-‐‑equiprobable one, any MIMO FIR minimum or non minimum phase channel. No condition is required on the numbers of sensors at the input and output.
4.2 Numerical example In figure (2), we consider a linear and transversal channel, a Volterra structure equalizer with order 2 and memory 2, the alphabet {±1} and the quadratic criterion mentioned before. It is important to note that the reached criterion value is the same for different initializations of the equal-‐‑izer, this can prove the absence of local minima. For the plot, we have considered three different initializations.
Fig. 2. The criterion value for different initializations: ab-‐‑
sence of local minima
5 CONCLUSION A statistical convergence analysis of a blind MIMO adap-‐‑tive Volterra equalizer adapted by a new family of algo-‐‑rithms is developed in this paper. We consider a general MIMO linear noiseless and minimum or non minimum phase channel. Using a specific approach tailored for the digital transmission context, we prove theoretically and without any hypothesis that the proposed system solves the problem of convergence towards local minima.
REFERENCES
[1] J.F Diouris, ”Comparison of Different Structures for Blind Adaptive Beamforming and Equalization”, IEEE ACSSC, Vol1, pp. 658-‐‑662, 1993
[2] J.Du, Q.Peng, H.Zhang, ”Adaptive Blind Channel Iden-‐‑
tification and Equalization for OFDM-‐‑MIMO Wireless Communication Systems”, IEEE PIMRC, Vol3 pp. 2078-‐‑2082, 2003.
[3] O. Shalvi and E. Weinstein, ”New criteria for blind decon-‐‑
volution of nonminimum phase systems (channels)”, IEEE trans. in information theory, Vol. 36, N 2, March 1990.
[4] Z. Ding and C.R Johnson, ”On the nonvanishing stability
of undesirable equilibria for FIR Godard blind equalizers”, IEEE Trans. on signal processing, Vol.41, N 5, pp 1940-‐‑1944, May 1993.
[5] G.J. Foschini, ”Equalization without altering or detect da-‐‑
ta”, AT.T Tech.J, pp 1885-‐‑1911, October 1985.
[6] C.R. Johnson, J.P. LeBlanc and V. Krishnamurthy, ”Go-‐‑dard blind equalizer misbehavior with correlated sources : two examples”, Maroccan Journal of Control, Computer sci-‐‑ence and signal processing, 1994.
[7] T. Rambadu and P. R Kumar,”Blind equalization for
MIMO FIR Channel in wireless communication systems”, ICARTCom, pp. 684-‐‑687, 2009.
[8] L. Tong, G. Xu, and T. Kailath, ”Blind identification and
equalization based on second-‐‑order statistics: a time do-‐‑main approach”, IEEE Trans. on Information Theory, vol 40, N2, pp. 340349, 1994.
[9] Y. Li and Z. Ding, ”Blind channel identification based on
second order cyclostationary statistics”, IEEE ICASSP,

28
vol.4, pp. 81 84, Minneapolis, Minn, USA, April 1993.
[10] K. Deergha, ”Adaptive Blind equalization of MIMO wire-‐‑less channels using coupled parallel estimators”, ICPWC, pp. 312-‐‑316, 2005.
[11] Y. Ben Jemaa, S. Cherif, M. Jaidane and S. Marcos,”Design
of Decision Feedback Equalizer with short training se-‐‑quence”, IEEE Vehicular Technology Conference (VTC), pp 2920-‐‑2925 Boston, USA, september 2000.
[12] M. Kallel, Y. Ben Jemaa et M. Jaidane ”On exact PLL per-‐‑
formances results for digital transmission context”, IEEE ISCCSP, Hammamet, Mars 2004.
[13] A G. Bessios and C L. Nikias, ”A New Blind Equalization
Algorithm Using Higher Order Statistics in a Decision Feedback Structure”, IEEE ACSSC, Vol2, pp. 721-‐‑725, 1991.
[14] G.M Raz and B.D Vanveen,”Blind equalization and iden-‐‑
tification of nonlinear and IIR systems -‐‑a least squares ap-‐‑proach”, IEEE Trans. on signal processing, Vol 48, N 1, pp 192-‐‑200, January 2000.
[15] F. Yangwang, J. Licheng and P. Jin, ”MIMO Volterra filter
equalization using pth order inverse approach”, ICASSP, Vol1, pp. 177-‐‑180, 2000.
[16] K.Deegha Rao, Adaptive Blind equalization of SIMO FIR
second order Volterra channels”, APCCAS, pp 794-‐‑797, 2008.
[17] J.G Proakis, ”Digital communications”, 2nd edition
McGraw-‐‑Hill, N.Y.1991.
[18] H. Besbes, Y. Ben Jemaa, and M. Jaidane, ”Exact Conver-‐‑gence Analysis of Affine Projection Algorithm : the finite alphabet case”, ICASSP, Vol.3, pp 1669-‐‑1672, March 1999.
[19] H. Besbes, M. Jaidane and J. Ezzine, ”On Exact Conver-‐‑
gence Results of Adaptive Filters : the Finite Alphabet Case”, Signal Processing, vol.80, N7, pp 13731384, 2000.
[20] W. Brewer, ”Kronecker products and matrix calculus in
system theory”, IEEE trans. on circuit and systems, Vol.CAS-‐‑25, N 9, pp 772-‐‑781, september 1978.
Y. Ben Jemâa received a Ph.D. in Electrical Engineering from the National Engineering School of Tunis, Tunisia (ENIT) in 2003. In June 2012, she obtained the HDR in Telecommunications from the same school. She joined the National Engineering School of Sfax (ENIS) in 2000 where she is an associate Professor in Telecommu-nication Engineering. She is a member of the research Lab. U2S at ENIT. Her research interests incluse signal and image processing and digital communications. M. Jaidane received the M.S. degree in Electrical engineering from the National Engineering School of Tunis (ENIT), Tunisia, in 1980. From 1980 to 1987, she worked as a Research Engineer at the Sig-nal and System laboratory, CNRS/SUPELEC, France. She received the Doctorat d’Etat degree in 1987. Since 1987, she was with the ENIT, where she is currently a Full Professor. She is a Member of the signal and System Unit, ENIT. Her teaching and research inter-ests are in adaptive systems for digital communications and audio processing.