Embed Size (px)
Citation preview
On nonlinear equations with negative exponents
Sun Yijing
University of Chinese Academy of Sciences
2016,6
1 / 43
Two type of equations with negative powers
(•) elliptic type of equations with negative powers:
(1) weak singularity,(2) strong singularity;
(•) Lp Minkowski problem with negative p.
2 / 43
Background
Consider the following equation
∆u +g(x)
up= 0 in Ω, u = 0 on ∂Ω
where Ω is a smooth bounded open set in RN ,N ≥ 1, g(x) ≥ 0belongs to a Lebesgue space and p > 0.
Physical models (boundary layer phenomena):(•) the motion of a body through a viscous fluid,(•) shock waves traveling over smooth surfaces,(•) the flow field above a moving conveyor belt,(•) chemical heterogenous catalysts, glacial advance, etc.
3 / 43
Background
(•) J.A.D,Ackroyd, On the laminar compressible boundary layerwith stationary origin on a moving flat wall,Proc.CambridgePhilos.Soc.63(1967),871-888.
Such singular type of equations have been the target ofinvestigation for decades starting with the works by Crandall,Rabinowitz and Tartar (Comm.PDEs1977); Stuart (Math.Z.1976)using degree theory, sub- and supersolutions, critical point theoryetc.
(•)Diaz-Hernandez-Rakotoson, Milan J.Math., 2011(•)Hernandez-Mancebo-Vega, Proc. Roy. Soc. Edinburgh A, 2007
4 / 43
Regularity for solutions
Differences:(•) Standard elliptic theory holds but can hardly be used because ofthe summability of functions with negative powers.(•) Bootstrap argument can’t be applied for negative powers.(•) An important issue in the study of solutions of singularequations is the gradient function |∇u| which may be unbounded.
Theorem: Let Ω be a smooth bounded domain of RN and let ϕ1 bethe first eigenfunction with ∆ϕ1 + λ1ϕ1 = 0, ϕ1|∂Ω = 0. Then∫
Ωϕ−r1 (x)dx <∞
if and only if −r > −1.
5 / 43
Regularity for solutions
Theorem (Gomes,SIAM J.Math.Analysis 86, Gui Changfeng-LinFanghua-del Pino, Proc. Roy. Soc. Edinburgh 92,93), :
Assume a distα(x , ∂Ω) ≤ g(x) ≤ b distα(x , ∂Ω), α ≥ 0.(•) α− p > −1,when α− p ≥ 0, u(x) ∈ C 1,β(Ω), ∀β ∈ (0, 1);when 0 > α− p > −1, u(x) ∈ C 1,α−p+1(Ω);c1dist(x , ∂Ω) ≤ u(x) ≤ c2dist(x , ∂Ω), ∀x ∈ Ω.(•) α− p = −1,u(x) ∈ Cβ(Ω),∀β ∈ (0, 1),
u(x) ∼ dist(x , ∂Ω) (D − ln dist(x , ∂Ω))1/(p+1) , ∀x ∈ Ω.(•) α− p < −1,u(x) ∈ C (2+α)/(p+1)(Ω),u(x) ∼ dist(x , ∂Ω)(2+α)/(p+1),∀x ∈ Ω.
6 / 43
(•)Regularize u−p as (u + ε)−p with small ε > 0 and pass to the limitalong the branches of positive solutions obtained by various theories;(•)Let I (u) be the energy functional:
I (u) =1
2
∫Ω| ∇u |2 dx − 1
1− p
∫Ωg(x)|u|1−pdx .
1) when −p > −1, I (u) is continuous on H10 (Ω),
when −p < −1, I (u) is a singular functional on H10 (Ω).
2) x ∈ Ω : |u(x) + tϕ(x)| = 0.3) the difference of two type of solutions:∫
Ω∇u · ∇φ− g(x)u−pφdx = 0, ∀φ ∈ C 1
0 (Ω)
∫Ω∇u · ∇φ− g(x)u−pφdx = 0, ∀φ ∈ H1
0 (Ω)
7 / 43
−1 < −p < 0, 0 < β < 1
Theorem (−1 < −p < 0, 0 < β < 1):
Let p, β ∈ (0, 1), g(x) ∈ C 2,α(Ω), g(x) ≥ 0 for all x ∈ Ω∆u + g(x)
up + λuβ = 0, x ∈ Ω;u = 0, on∂Ω.
(•)This problem has a unique solution uλ ∈ C 2,α(Ω) ∩ C (Ω),∀λ ≥ 0,(•)cdist(x , ∂Ω) ≤ uλ(x) ≤ Cdist(x , ∂Ω), ∀x ∈ Ω,(•)uλ ∈ C 1,1−p(Ω).
8 / 43
−1 < −p < 0, β > 1
Theorem (−1 < −p < 0, β > 1):∆u + g(x)
up + λuβ = 0, x ∈ Ω;u = 0, on∂Ω
(•)when g ∈ C 1(Ω), g(x) > 0 for all x ∈ Ω, and β > 1, there exists λ∗
such that this problem has at least one classical solution for eachλ ∈ [0, λ∗), no solution for any λ > λ∗.(•)when g ∈ L∞(Ω), g ≥ 0, g 6= 0, and 1 < β < 2∗ − 1, this problemhas at least two H1
0 -solutions for each λ ∈ (0, λ∗).
9 / 43
Background of estimates for λ∗
The classical result is the following:
Theorem (C. Bandle, Isoperimetric Inequalities and Applications):∆u + λ [g(x)f (u) + h(x)] = 0, x ∈ Ω; u = 0on∂Ω∆v + λ [g∗(x)f (v) + h∗(x)] = 0, x ∈ Ω∗; v = 0on∂Ω∗.(Schwarz symmetrization)
Assume that f1(x , t) = g(x)f (t) + h(x) satisfies the following:
(•)f1(x , t) is Holder continuous in Ω× R+,(•)f1(x , 0) > 0 in Ω,(•)(∂f1/∂t) (x , t) > 0 in Ω× R+.
Then λ∗(Ω) ≥ λ∗(Ω∗).
10 / 43
Background of estimates for λ∗
Theorem (F.Gazzola-A.Malchiodi, Comm.PDEs2002):
Let 1 < p ≤ N+2N−2 , and λ∗ be the extremal value for the problem:
∆u + λ(1 + u)p = 0, x ∈ Ω;u = 0, on∂Ω.
Then
λ∗(Ω) ≥ ω2n
|Ω|2N(N − 2)
4
where ωn is the volume of the unit sphere in RN ,N ≥ 3.
11 / 43
Sun-Wu, JFA 2011
Theorem (Sun Yijing-Wu Shaoping, J.Funct.Anal. 2011):
Let −1 < −p < 0,g ∈ L∞(Ω) is like distα(x , ∂Ω) with α− p ≥ 0.∆u + g(x)
up + λu2∗−1 = 0, x ∈ Ω;u = 0, on∂Ω.
Let λ∗ be the extremal value for the above problem. Then
λ∗ ≥(
p + 1
p + 2∗ − 1
)(2∗ − 2
p + 2∗ − 1
) 2∗−2p+1
(πN(N − 2)
|Ω|2/N
) p+2∗−1p+1
(1
‖g‖∞
) 2∗−2p+1
(Γ(N/2)
Γ(N)
) 2(p+2∗−1)N(p+1)
.
where Γ(x) =∫∞
0 tx−1e−tdt.
12 / 43
Classical Lazer-McKenna result
Theorem (A.C.Lazer-P.J.McKenna, Proc.AMS 1991):
Let Ω ⊂ RN , N ≥ 1 be bounded open set with smooth boundary ∂Ω.Let p > 0, g(x) ∈ Cα(Ω), g(x) > 0 for all x ∈ Ω.
∆u + g(x)up = 0, x ∈ Ω;
u = 0, on∂Ω.
(•)This problem has a unique solution u ∈ C 2,α(Ω) ∩ C (Ω).(•)The solution u is in W 1,2 if and only if p < 3.(•)The solution u is not in C 1(Ω) if p > 1 (|∇u| has singularity).
13 / 43
H1loc(Ω)-solution for −p < −1
Theorem (L.Boccardo-L.Orsina, Calc. Var. 2010):
Let p > 1, and let g be a nonnegative function in L1(Ω) (notidentically zero). Then the problem ∆u + g(x)
up = 0, x ∈ Ω;u > 0, inΩu = 0, on ∂Ω.
admits a solution u in H1loc(Ω) in the sense of∫
Ω∇u · ∇ϕ− g(x)u−pϕdx = 0,∀ϕ ∈ C 1
0 (Ω)
and up+1
2 ∈ H10 (Ω).
14 / 43
Difficulties for H10 -solutions when −p < −1
The central point addressed for the strong singularity is thefollowing: in absence of growth conditions on negative powers, thevariational approach seems useless, since the corresponding singularfunctional is not well defined even on positive H1
0 (Ω)-functions. Themajor obstacle has to be faced: are there enough positive H1
0 (Ω)functions for the corresponding negative powers to prove that aconstrained minimum point is the weak solution. At first sight oneis tempted to answer this question in the negative. On the contrary,we shall see that under suitable conditions on coefficients g(x) toguarantee the nonempty of some suitable constrained sets it couldbe possible to recast the problem into a variational framework, anddoes indeed lead to a solution.
15 / 43
Sun, Proc. Roy. Soc. Edinburgh A 2013
Theorem (Sun Yijing, Proc. Roy. Soc. Edinburgh A 2013):Let Ω ⊂ RN , N ≥ 1 be bounded open set with smooth boundary,g ∈ L1(Ω), g > 0 a.e. in Ω (not necessarily has positive lower boundand may be unbounded in Ω), and −p ∈ (−∞,−1). Then theproblem
∆u + g(x)up = 0, x ∈ Ω;
u = 0, on∂Ω.
admits a unique H10 solution if and only if there exists u0 ∈ H1
0 (Ω) s.t.∫Ωg(x)|u0|1−pdx < +∞.
Remark: Here the solution is in the sense that u ∈ H10 (Ω), u(x) > 0
a.e. in Ω, ∫Ω∇u · ∇ϕ− g(x)u−pϕdx = 0,∀ϕ ∈ H1
0 (Ω).
16 / 43
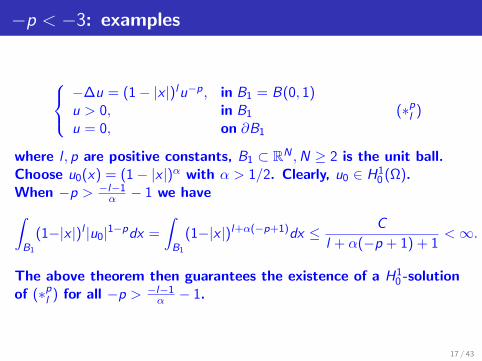
−p < −3: examples
−∆u = (1− |x |)lu−p, in B1 = B(0, 1)u > 0, in B1 (∗pl )u = 0, on ∂B1
where l , p are positive constants, B1 ⊂ RN ,N ≥ 2 is the unit ball.Choose u0(x) = (1− |x |)α with α > 1/2. Clearly, u0 ∈ H1
0 (Ω).When −p > −l−1
α − 1 we have∫B1
(1−|x |)l |u0|1−pdx =
∫B1
(1−|x |)l+α(−p+1)dx ≤ C
l + α(−p + 1) + 1<∞.
The above theorem then guarantees the existence of a H10 -solution
of (∗pl ) for all −p > −l−1α − 1.
17 / 43
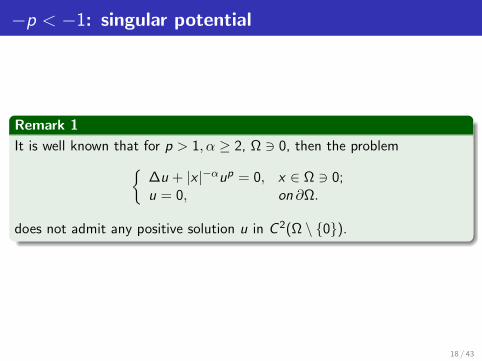
−p < −1: singular potential
Remark 1
It is well known that for p > 1, α ≥ 2, Ω 3 0, then the problem∆u + |x |−αup = 0, x ∈ Ω 3 0;u = 0, on ∂Ω.
does not admit any positive solution u in C 2(Ω \ 0).
18 / 43
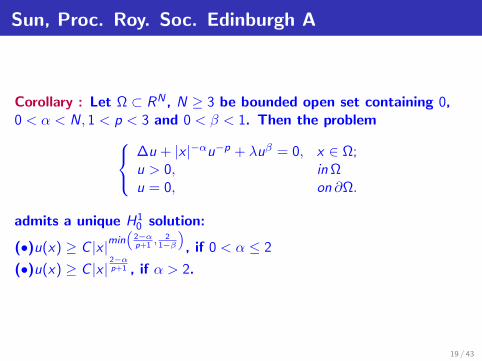
Sun, Proc. Roy. Soc. Edinburgh A
Corollary : Let Ω ⊂ RN , N ≥ 3 be bounded open set containing 0,0 < α < N, 1 < p < 3 and 0 < β < 1. Then the problem
∆u + |x |−αu−p + λuβ = 0, x ∈ Ω;u > 0, inΩu = 0, on ∂Ω.
admits a unique H10 solution:
(•)u(x) ≥ C |x |min(
2−αp+1
, 21−β
), if 0 < α ≤ 2
(•)u(x) ≥ C |x |2−αp+1 , if α > 2.
19 / 43
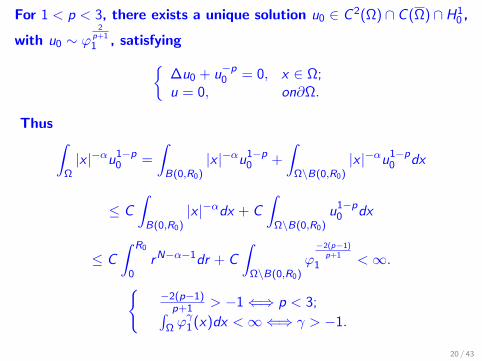
For 1 < p < 3, there exists a unique solution u0 ∈ C 2(Ω) ∩ C (Ω) ∩H10 ,
with u0 ∼ ϕ2
p+1
1 , satisfying∆u0 + u−p0 = 0, x ∈ Ω;u = 0, on∂Ω.
Thus ∫Ω|x |−αu1−p
0 =
∫B(0,R0)
|x |−αu1−p0 +
∫Ω\B(0,R0)
|x |−αu1−p0 dx
≤ C
∫B(0,R0)
|x |−αdx + C
∫Ω\B(0,R0)
u1−p0 dx
≤ C
∫ R0
0rN−α−1dr + C
∫Ω\B(0,R0)
ϕ−2(p−1)
p+1
1 <∞.−2(p−1)
p+1 > −1⇐⇒ p < 3;∫Ω ϕ
γ1(x)dx <∞⇐⇒ γ > −1.
20 / 43
−p ≤ −3, Sun-Zhang, Calc. Var. 2014
Theorem (Sun Yijing-Zhang Duanzhi, Calc. Var. 2014):Let Ω ⊂ RN , N ≥ 1 be bounded open set with smooth boundary. If−p ≤ −3, then ∫
Ω|u|1−pdx = +∞,∀u ∈ H1
0 (Ω).
21 / 43
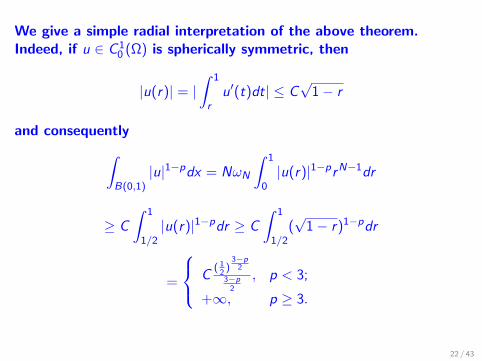
We give a simple radial interpretation of the above theorem.Indeed, if u ∈ C 1
0 (Ω) is spherically symmetric, then
|u(r)| = |∫ 1
ru′(t)dt| ≤ C
√1− r
and consequently∫B(0,1)
|u|1−pdx = NωN
∫ 1
0|u(r)|1−prN−1dr
≥ C
∫ 1
1/2|u(r)|1−pdr ≥ C
∫ 1
1/2(√
1− r)1−pdr
=
C( 1
2)
3−p2
3−p2
, p < 3;
+∞, p ≥ 3.
22 / 43
−p < −1
Remark 2
Since the summability of u−p near the boundary of Ω is still not available,we do not know whether or not∫
Ω g(x)u−p+εε ϕ→
∫Ω g(x)u−pϕ,∀ϕ ∈ H1
0 (Ω) we provide a local uniformestimate for these solutions uε to Eg ,p−ε
23 / 43
Sun-Zhang, Calc. Var. 2014
Theorem (Sun Yijing-Zhang Duanzhi, Calc. Var. 2014):
Let g be a positive function in Lαloc(Ω) ∩ L1(Ω) with α > N2 such that
g(x) ≥ cω > 0,∀ω ⊂⊂ Ω. Let un ∈ H10 (Ω) ∩ C 0
loc(Ω) be a solutionsequence of
∆un + g(x)
up− 1
nn
= 0, x ∈ Ω;
un = 0, on∂Ω.
where p > 1, with uniformly bounded energy
supn
∫Ωg(x)u1−p
n < +∞.
Then, for any compact set K in Ω there exists CK such that
maxx∈Kun(x) ≤ CK .
24 / 43
Classical Minkowski problem
Minkowski problem asks what are the necessary and sufficientconditions on a finite Borel measure on SN−1 so that it is thesurface area measure of a convex body in RN .
Remark 3
A convex body is a compact convex subset of RN with non-empty interior.
Remark 4
The surface area measure, SK , of a convex body K (compact convex setwith non-empty interior) is a Borel measure on the unit sphere SN−1,defined for each Borel ω ⊂ SN−1 by
SK (ω) =
∫x∈γ−1
K (ω)dHN−1(x),
where γK : ∂K → SN−1 is the Gauss map defined on the boundary of K ,and HN−1 is (N − 1)-dimensional Hausdorff measure. .
Given a compact convex body M in Rn, the Gaussian curvature kand the support function u to the convex body M are then relatedby the equation
det(∇i ,ju + ei ,ju) =1
kon Sn−1
where ui ,j is the Hessian matrix of u with respect to an orthonormalframe on Sn−1.
25 / 43
Classical Minkowski problem
Remark 5
If the measure µ has a smooth density g , the Minkowski problem isequivalent to the study of solutions to the following partial differentialequation on the unit sphere
det(∇i ,ju + δi ,ju) = gonSn−1
where ui ,j is the Hessian matrix of u with respect to an orthonormal frameon Sn−1, δi ,j is the Kronecker delta.
Note that for a smooth convex body K with support function u, thequantity det(∇i ,ju + δi ,ju) is the reciprocal of the Gauss curvature ofthe boundary of K , that is,
det(∇i ,ju + δi ,ju) =1
kon Sn−1
26 / 43
Classical Minkowski problem
(•)H.Minkowski, Gesammelt Abhandlungen von Herman Minkowski,Chelsea, New York, 1897,pp.198-219, 1967,pp103-121.(•)A.D.Alexandrov, Smoothness of the convex surface of boundedGaussian curvature,C.R.Acad.Sci.URSS (1942)195-199.(•)W.Fenchel, B.Jessen, Mengenfunktionen und konvexe Korper,Danske Vid. Selskab. Mat.-fys. Medd. 16 (1938), 1-31.(•)H.Lewy, On differential geometry in the large I (Minkowski’sproblem), Trans.Amer.Math.Soc.43(1938)258-270.(•)L.Nirenberg, The Weyl and Minkowski problems in differentialgeometry in the large, Comm.Pure Appl.Math.6(1953)337-394.(•) A.V.Pogorelov, The Minkowski Multidimensional Problem, V.H. Winston Sons, Washington, DC, 1978.(•)E.Calabi,Improper affine hyperspheres of convex type and ageneralization of a theorem, Michigan Math. J. 5 (1958)105-126.(•)S.Y.Cheng,S.T.Yau, The n-dimensional minkowski problem,Comm.Pure Appl.Math.29(1976)495-516.
27 / 43
Classical Minkowski problem
(•)L.Caffarelli, L.Nirenberg,J.Spruck,The Dirichlet problem fornonlinear second order elliptic equations I. Monge-Ampereequations, Comm.Pure Appl.Math.34(1984)369-402.(•)L.Caffarelli, Interior a priori estimates for solutions of fullynonlinear equations, Ann. of Math. 131 (1989)189-213.(•)L.Caffarelli, A localization property of viscosity solutions to theMonge-Ampere equation and their strict convexity, Ann. of Math.131 (1990)129-134.(•)L.Caffarelli, Interior W 2,p estimates for solutions of theMonge-Ampere equation, Ann. of Math. 131 (1990)135-150.
28 / 43
Lp Minkowski problem
A century after Minkowski’s original work, an Lp version ofBrunn-Minkowski theory began to emerge:
Remark 6
If K is a convex body in RN that contains the origin in its interior andp ∈ R, then the Lp surface area measure, Sp(K , ) of is a Borel measure onthe unit sphere SN−1 defined for each Borel ω ⊂ SN−1 by
Sp(K , ω) =
∫x∈γ−1
K (ω)hK (x)1−pdHN−1(x),
where γK : ∂K → SN−1 is the Gauss map, HN−1 is Hausdorff measure,and hK (x) is the support function of K .
(•)E.Lutwak, The Brunn-Minkowski-Firey theory. I.Mixed volumesand the Minkowski problem, J.D. Geom. 38 (1993) 131-150(•)E.Lutwak,The Brunn-Minkowski-Firey theory. II. Affine andgeominimal surface areas, Adv.Math.118 (1996)244-294
29 / 43
Lp Minkowski problem
Remark 7
(•)When p = 1, the measure S1(K , ·) is the classical surface area measureof K .(•)When p = 0, the measure 1
N S0(K , ·) is the cone-volume measure of K .(•)When p = 2, the measure S2(K , ·) is the quadratic surface areameasure of K .
30 / 43
Geometry for Lp surface area measure
(•)M.Meyer, E.Werner, On the p-affine surface area, Adv. in Math.152 (2000)(p ≥ −N using Santalo bodies).(•)C.Schutt, E.Werner, Polytopes with vertices chosen randomlyfrom the boundary of a convex body, GAFA 2001-2002, LectureNotes in Mathematics, Vol. 1807, Springer, Berlin,pp.241-422(−∞ ≤ p ≤ +∞ ).(•)E.Werner, The p-affine surface area and geometricinterpretations, Rend.Circ.Math.Palermo Serie II 70(2002)(−∞ ≤ p ≤ +∞ using weighted floating bodies).
31 / 43
Lp Minkowski problem
Lp Minkowski problem asks what are the necessary and sufficientconditions on a finite Borel measure on SN−1 so that it is the Lpsurface area measure of a convex body in RN .
Remark 8
If the measure µ has a smooth density g (called the ”data”), the LpMinkowski problem is equivalent to the study of solutions to the followingpartial differential equation on the unit sphere Sn−1:
det(∇i ,ju + δi ,ju) = gup−1onSn−1
where ui ,j is the Hessian matrix of u with respect to an orthonormal frameon Sn−1.
32 / 43
Related results
(•)M.Gage,Y.Li, Evolving planes curves by curvature in relativegeometries, Duke Math.J. 72(1993)(p = 0 with smooth data).(•)A.Stancu, The discrete plannar L0-Minkowski problem, Adv. inMath. 167 (2002)(p = 0 with discrete measure).(•)B.Andrews, Classifications of limiting shapes for isotropic curveflows, J.Amer.Math.Soc. (2003)(for all real p with constant data).(•)W.Chen,Lp Minkowski problem with not necessarily positivedata, Adv. in Math. 201(2006)(p ∈ [−2, 0] with continuous data).(•)M.Jiang, Remarks on the 2-dimensional Lp-Minkowski problem,Adv. Nonlinear stud.10 (2010)(p ∈ (−∞, 0) with continuous data).(•)J.Dou, M.Zhu, The two dimensional Lp Minkowski problem andnonlinear equations with negative exponents, Adv. in Math.230(2012)(p ∈ (−∞,−2] with continuous data).(•)H.Boroczky,E.Lutwak,D.Yang,G.Zhang, The logarithmicMinkowski problem, J.Amer.Math.Soc. (2013)(p = 0 with evendata).
33 / 43
p ∈ [−2, 0]
Theorem (W.Chen, Adv. in Math. 2006):
Let −2 ≤ p ≤ 0, and let g be a continuous and πk -periodic for some
integer k > 1. Then the equation
u′′ + u =g(θ)
u1−p onS , u > 0 onS
has a positive solution if ∫ 2π
0g(θ)dθ > 0.
34 / 43
p ∈ (−∞, 0]
Theorem (M.Jiang, Adv. Nonlinear Stud. 2010):
Let g be a T -periodic continuous function. Then the equation
u′′ + u =g(θ)
u1−p onS , u > 0 onS
has a positive solution if one of the following conditions ia satisfies:(1)p ≤ 0, T < π,
∫ T0 g(θ)dθ > 0;
(2)p ∈ (−1, 0], T = π,∫ π
0 g(θ)dθ > 0;(3)p ∈ (−2,−1], T = π, g is positive somewhere.
35 / 43
p ≤ −2
Theorem (Dou-Zhu, Adv. in Math. 2012):
For p ≤ −2, if g is a continuous, positive at one point andπk -periodic for some integer k > 1. Then the equation
u′′ + u =g(θ)
u1−p onS , u > 0 onS
has a positive solution.
36 / 43
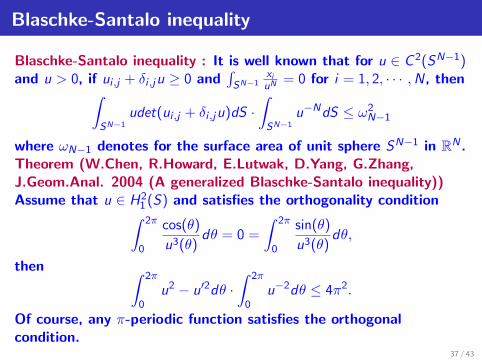
Blaschke-Santalo inequality
Blaschke-Santalo inequality : It is well known that for u ∈ C 2(SN−1)and u > 0, if ui ,j + δi ,ju ≥ 0 and
∫SN−1
xiuN
= 0 for i = 1, 2, · · · ,N, then∫SN−1
udet(ui ,j + δi ,ju)dS ·∫SN−1
u−NdS ≤ ω2N−1
where ωN−1 denotes for the surface area of unit sphere SN−1 in RN .Theorem (W.Chen, R.Howard, E.Lutwak, D.Yang, G.Zhang,J.Geom.Anal. 2004 (A generalized Blaschke-Santalo inequality))Assume that u ∈ H2
1 (S) and satisfies the orthogonality condition∫ 2π
0
cos(θ)
u3(θ)dθ = 0 =
∫ 2π
0
sin(θ)
u3(θ)dθ,
then ∫ 2π
0u2 − u′2dθ ·
∫ 2π
0u−2dθ ≤ 4π2.
Of course, any π-periodic function satisfies the orthogonalcondition.
37 / 43
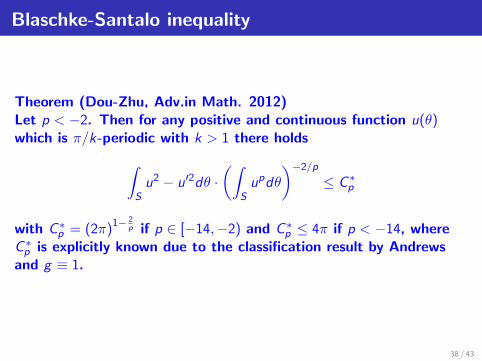
Blaschke-Santalo inequality
Theorem (Dou-Zhu, Adv.in Math. 2012)Let p < −2. Then for any positive and continuous function u(θ)which is π/k-periodic with k > 1 there holds∫
Su2 − u′2dθ ·
(∫Supdθ
)−2/p
≤ C ∗p
with C ∗p = (2π)1− 2p if p ∈ [−14,−2) and C ∗p ≤ 4π if p < −14, where
C ∗p is explicitly known due to the classification result by Andrewsand g ≡ 1.
38 / 43
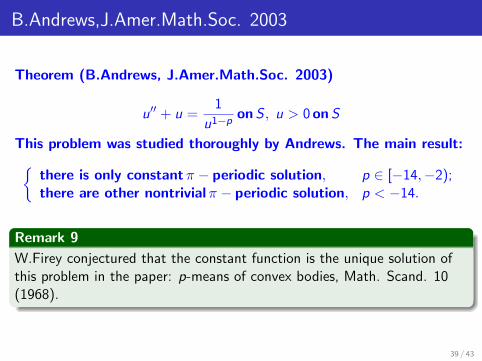
B.Andrews,J.Amer.Math.Soc. 2003
Theorem (B.Andrews, J.Amer.Math.Soc. 2003)
u′′ + u =1
u1−p onS , u > 0 onS
This problem was studied thoroughly by Andrews. The main result:there is only constantπ − periodic solution, p ∈ [−14,−2);there are other nontrivialπ − periodic solution, p < −14.
Remark 9
W.Firey conjectured that the constant function is the unique solution ofthis problem in the paper: p-means of convex bodies, Math. Scand. 10(1968).
39 / 43
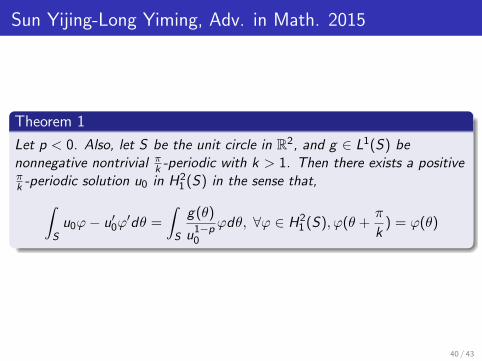
Sun Yijing-Long Yiming, Adv. in Math. 2015
Theorem 1
Let p < 0. Also, let S be the unit circle in R2, and g ∈ L1(S) benonnegative nontrivial πk -periodic with k > 1. Then there exists a positiveπk -periodic solution u0 in H2
1 (S) in the sense that,∫Su0ϕ− u′0ϕ
′dθ =
∫S
g(θ)
u1−p0
ϕdθ, ∀ϕ ∈ H21 (S), ϕ(θ +
π
k) = ϕ(θ)
40 / 43
Sun Yijing-Long Yiming, Adv.in Math. 2015
Theorem 2
(Blaschke-Santalo Inequality with L1 data) Let S be the unit circle in R2,and g ∈ L1(S) be nonnegative π
k -periodic function with k > 1. Then thereexists Cg > 0 such that for any u(θ) ∈ H2
1 (S) and u > 0 which is2πk -periodic, ∫
Su2 − u′2dθ ·
∫Sg(θ)u−2dθ ≤ Cg
where Cg > 0 is the sharp constant which can be achieved at the positiveπk -periodic solution u0 ∈ H2
1 (S) of L−2 Minkowski problem in Theorem 1.
41 / 43
Sun Yijing-Long Yiming, Adv.in Math. 2015
Theorem 3
We let g ∈ L1(S) be nonnegative π/k-periodic function with k > 1 and letp < 0. Then there exists Cp,g > 0 such that for any u(θ) ∈ H2
1 (S) andu > 0 which is π/k-periodic with k > 1,∫
Su2 − u′2dθ ·
(∫Sg(θ)updθ
)−2/p
≤ Cp,g
where Cp,g is achieved at the positive π/k-periodic solution u0 in H21 (S) of
Lp Minkowski problem in the above Theorem 1.
We consequently recover Dou-Zhu’s Theorem.
42 / 43
Remark 10
Note that, for the operator u′′ + u (its energy functional 12
∫S u
2 − u′2dθ),unboundedness of any sequence does not necessarily cause a significantincrement in the value of the energy functional (ie, 1
2
∫S u
2n − u′2n dθ → a
finite number means nothing about ‖un‖H21), which is at the core of the Lp
Minkowski problem.
43 / 43

Thank you!
44 / 43





























