Embed Size (px)
Citation preview

On-line Scene Understanding for Closed Loop Control
Lina Maria Paz† Tarlan Suleymanov† Pedro Pinies† Geoff Hester† Paul Newman†
Abstract—This paper describes a rapid on-line system ableto compute the semantics of outdoor scenes using dense stereoperception. Our main focus is to aid a robot to discovercollision-free routes as an alternative to explore the environmentduring fall-back planning (localiser failure). The general sceneunderstanding problem is formulated in a probabilistic frame-work that combines machine learning with continuous convexregularisation. In order to learn distinctive scene labels, oursystem relies on shallow classifiers in combination with a suite ofcontextual features derived from depth and colour cues. The pro-posed system is heterogeneous taking advantage of simultaneousGPGPU and multithreaded CPU to carry out important taskssuch as dense depth map estimation, multi-labelling predictionand image segmentation. Extensive experiments on the KITTIdataset support the robustness of out system to derive collision-free local routes. An accompanied video validates the system atlive execution in an outdoor experiment with a wheeled robotexploring over hundreds of metres of trajectory.
Supplementary material: https://youtu.be/nvlAf4B-mFY
I. INTRODUCTION
A fundamental task for a mobile robot is the ability to find
and follow drivable or collision-free paths. In this paper, we
propose a vision-based system that, via a variational approach,
is able to segment and label semantically distinctive parts of
the local scene including paths through it. Our motivation,
beyond the obvious case of autonomous exploration, is the
creation of a safety-net process which in the temporary ab-
sences of a localiser can still execute a safe and coherent path
through its workspace. Figure 1 illustrates our approach for a
single image frame.
Our system integrates different modules including dense
local mapping, semantic label prediction, image segmentation,
route calculation and robot control. A stereo camera is used
as the primary sensing modality in this paper. Stereo cameras
can provide an inexpensive and reliable means of sensing the
environment for a robot at true scale if appropriately fast
reliable processing schemes are deployed. Over the years,
novel theoretical foundations of continuous optimisation [1],
[2] and machine learning [3], [4] for image analysis, upon
which the most advanced algorithms rely, have become ac-
cessible for robotics and computer vision applications. In
addition, the continuous development in parallel computing
allows us to build systems that can respond in soft real
time. Our algorithm for path discovery works in outdoor
environments taking advantage of multiple, complementary
depth and colour cues. We use these cues in a multi-label
†Mobile Robotics GroupDepartment of Engineering ScienceUniversity of Oxford17 Parks Road, OxfordOX1 3PJ, United Kingdomtarlan,linapaz,ppinies,[email protected],[email protected]
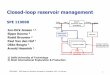
Fig. 1: Our approach combines the use of a shallow classifier withconvex relaxation in a multi-labelling problem to obtain semanticallysegmented images. Given the labels describing drivable regions, wedeliver collision-free local routes to the robot controller. Top, a seg-mented image with the plausible path. Bottom, a dense representationof the local scene with the path to be executed.
image segmentation approach. The problem is formulated in a
probabilistic framework that combines machine learning with
convex regularisation. In order to learn distinctive scene labels,
we rely on shallow classifiers such as Random Forests (RF)
[5]. This choice is driven by the intrinsic property of the
RFs as low variance classifiers. As a result, they provide
better generalisation by preventing from the undesirable over-
fitting problem. In addition, RFs explicitly allow us to model
pixel-wise label probabilities with frequentist inference [6].
Moreover, RFs can easily adapt themselves to architectures
supporting parallel computing and multi-threading to rapidly
predict the per-pixel label probabilities. We summarise our
contributions as follows:
• We demonstrate the ability of our system to run con-
tinuous optimisation at two different tasks in reasonable
execution times –i.e. dense depth map estimation and
multi-labelling image segmentation.
• We derive plausible routes by analysing the image seman-
tics corresponding to drivable regions (e.g. road, ground).
We analyse the ability of RFs to combine multiple features
leading to a further increase in performance when colour
and depth features are used simultaneously. We show how
our system can rapidly obtain the required semantics – and
therefore paths– at VGA resolution. Extensive experiments
on the KITTI dataset support the robustness of out system

to derive collision-free local routes. An accompanied video
supports the robustness of the system at live execution in
an outdoor experiment with a wheeled robot exploring over
hundreds of metres of trajectory.
II. RELATED WORK
Over the past few years, there has been an increasing
development of path-following algorithms. Many of these
algorithms are not necessarily adaptive. Some rely on prior
knowledge of specific visual characteristics such as lane mark-
ers or road boundaries of the road surface [7], [8] or their
geometric structure using complementary sensor modalities
such as LIDAR [9], [10]. Other approaches employ supervised
learning techniques to learn to recognise a desired class of
roads by exploiting colour cues unique to the road surface in
combination with segmentation algorithms [11].
In this paper, we take advantage of the two frameworks by
combining dense local geometry and image colour cues. We
note, however, that our ultimate goal is to find a drivable path
with no assumption of any particular structure – i.e, no lane
or border information is used as prior. Therefore, we deliver
only collision-free paths that are suitable for pure exploration,
fall-back planning (localiser failure) and off-road applications.
The focus of much of our work is the development of a
path-following algorithm using scene understanding through
image segmentation. Common approaches use information
from dense stereo maps with Conditional Random Fields
(CRFs) [12] or Convolutional Neural Nets (CNNs) [13], [14]
to obtain a reasonable image segmentation – at the expense
of higher computational cost to predict the per-pixel labels.
A good assumption is that many scenes are a composite of
vertical surfaces –e.g. buildings, vehicles, pedestrians– w.r.t
the horizontal ground –e.g., road and sidewalk– with possible
parts of the sky [13]. Analogously, we model the appearance
of the ground using cues at pixel–level, such as colour and
texture, together with contextual information from dense depth
maps – in fact, they play an important role in our image
segmentation task. In this work, because we require realtime
performance, and in contrast to [13], [14], we use a shallow
classifier rather than a deep classifier [15] to provide the data
term into a down stream semantic regularisation formulated as
continuous convex relaxation.
III. SYSTEM OVERVIEW
Our intermediate (but welcome) goal is to provide per-pixel
semantics for the simple application of exploration with a
mobile robot at near real time. To this end, we design a system
consisting of several tasks running in a multi-thread process
as illustrated in Figure 2. Each left and right image of the
stereo pair Ilr, is processed in a parallel task to estimate a
dense depth map ξ . In this paper we extend the approach
presented in [16] –whose solution relies on continuous energy
minimisation– to estimate stereo depth maps. Such approach
exploits the use of the Augmented Lagrangian (AL) method to
accelerate the convergence of the primal-dual algorithm. The
Depth map Estimation
GPU (~6Hz)
Multilabel Regularisation
GPU (~6.5Hz)
Feature Extraction
Multithread CPU (~40Hz per channel)
Free collision Local Path
Planning CPU
(~200hz)
Label Prediction
Multithread CPU ( ~100Hz)
Plan Execution
Shallow Classifier
Fig. 2: Scene understanding pipeline for collision-free route follow-ing. The system considers different modules running in a main CPUmultiple thread process. Stereo pairs are first processed in a densedepth map estimation task. In parallel, several CPU threads canprocess the rectified images to extract different colour and depthcontextual feature channels. A different task is used to train ourshallow Random Forest. During online mode, the output of theRandom Forest produces the predicted per-pixel label probabilities.A new task uses this information to produced a regularised imagesegmentation. Given the image segmentation solution, we analysethe ground label and extract a feasible path. Finally we send the pathto the robot controller.
algorithm supports per-pixel calculations, therefore allowing
us to run the task on an available GPU.
Simultaneously, several CPU threads process the left image
to extract different features channels Z consisting of colour
Zrgb, location Zloc, filter-banks Z f and depth-context features
Zξ .
The channels are received by a different task in charge of
training our shallow Random Forest. During on-line mode,
the output of the Random Forest produces per-pixel u prob-
abilities PT(u ∈ Li|zu) of u belonging to a set of labels
Li, i ∈ 1, . . . ,K) where K is the number of labels. A
final task uses this information to estimate the regularised
image segmentation. Analogous to the depth map estimation
task, we run the regularisation on the same GPU. Given the
segmentation solution, we analyse the ground label and extract
a feasible path. Finally we send the path to the robot controller.
IV. PREDICTING LABELS WITH A RANDOM FOREST
A Random Forest (RF) is a popular machine learning
method for classification and regression, which consists of an
ensemble of decision trees Tj, j ∈ 1 · · ·T with predefined
tree depth dT. It has been shown that combining separate
decision trees to form a forest improves performance of
prediction and prevents over-fitting [5]. In our RF, each tree
Tj is trained individually. We follow the classical construction
of the decision tree as a deterministic procedure. In order to
prevent having identical trees, our trees are trained on different
set of per-pixel features Z using a bootstrap procedure. For
each tree, the same number of pixels as in the original set
is randomly selected by sampling with replacement. As a
result, some feature samples may appear several times, while
some others could be absent. In addition, we randomly select
features in each node inducing several node searching splits.
Figure 3 illustrates this process.

. . .
z∗ > θ∗
zu
PT1(u 2 Li|zu) PTT
(u 2 Li|zu)
zu
Fig. 3: The RF classifier uses per-pixel features derived from colourand depth cues. Given a new pixel sample z, each tree classifies itin a different leaf. Each leaf saves a histogram modelling the classdistribution over the samples.
A. Scene Features
A set of feature channels is used in order to obtain in-
formative information about the scene by applying various
transformations on the colour and depth map images. Let
zu ∈ Z be a per-pixel feature vector defined as
zu =[
zTrgb zT
loc zTf zT
ξ ] (1)
where zrgb comprises an illumination invariant transform
zill inv and a rg-chromaticity transform zrg−chroma applied over
the rgb pixel channels. zξ is represented by two contextual
transforms over the depth: first, the height of the 3D back-
projection of the pixel w.r.t the ground zhg; second, the vertical
disparity gradient zvg. In addition, we estimate the distance
from the pixel to the horizon line zloc. Finally, we use the
Leung-Malik (LM) filter bank z f , a collection of Gaussian and
Laplacian of Gaussian filters at various scales and orientations
to represent the local texture.
B. Estimation of label distribution
The probability PT(u ∈ Li|zu) of a pixel u belonging to a
particular label Li is the result of a voting strategy. For each
tree in the forest Tj, a subset of the components of the feature
vector zu are compared at each node to a given threshold θ .
The comparison determines the next branch to follow until a
leaf node is reached. As can be seen in Figure 3, histograms
learnt during the training phase are stored at the leaves of the
trees. For a given tree, the histograms contain the number of
pixels per label in the training set that end up in that leaf.
These histograms aim to approximate the probability PTj(u ∈
Li|zu). During on-line mode, the label distribution of a test
pixel is given by the average of the histograms stored at the
corresponding leaf of each tree in the forest:
PT(u ∈ Li|zu) =1
T
T
∑j=1
PTj(u ∈ Li|zu) (2)
V. REGULARISATION VIA CONVEX RELAXATION
With the initial per-pixel classification results in hand,
greatly improved results can be obtained by formulating the
complete image segmentation as a labelling problem with
a global energy function that balances “smoothness” of the
labelled segments (a prior) and per-pixel probabilities (a data
term) coming from the random forest. The energy function is
given by:
minΩi
1
2
K
∑i=1
Per(Ωi)+K
∑i=1
∫
Ωi
fi(u)du
(3)
s.t. Ω =K⋃
i=1
Ωi, Ωi ∩Ω j = /0, ∀i 6= j
where Ω ∈ R2 represents all the pixels in the image assigned
to K disjoint regions Ωi (e.g. ground, vegetation, obstacles and
sky).
In Eq.(3) the data term is given by the sum of the
costs of the unary potentials fi(u) = − log(PT(u ∈ Li|zu))per segmented region Ωi. The intuition behind fi(u) is that
when pixel u belongs to region Ωi with a high probability
(PT(u ∈ Li|zu) ≈ 1) the cost added is negligible ( fi(u) ≈ 0),
on the contrary, low probabilities produce an increasingly
unbounded cost. The main effect of the smoothness term is
to reduce the perimeter of the regions Per(Ωi) such that it
tends to smooth the boundary between neighbours and delete
small regions surrounded by bigger ones. In order to obtain a
more convenient expression of the energy for optimisation we
represent each region instead by its indicator function:
φi(u) =
1 if u ∈Ωi
0 otherwise(4)
The energy function in Eq.(3) can then be described by:
minφi(u)
1
2
K
∑i=1
∫
Ω|∇φi(u)|du+
K
∑i=1
∫
Ωφi(u) fi(u)du
(5)
s.t. φi(u) ∈ 0,1,K
∑i=1
φi(u) = 1
where∫
Ω |∇φi(u)| is the Total Variation (TV) of the indicator
function φi(u) that can be shown to be equal to the perimeter
of the segment.
The constraint φi(u) ∈ 0,1 makes the problem combina-
torial and NP-hard so it can only be approximately solved. We
use a known fast relaxation approach [17] that transforms the
original problem into a convex one. While this relaxation is not
the tightest, it produces good results in practice. The relaxation
is based on allowing φi(u) to take values in the interval
1 3 5 7 9 11 13 15 17 19Tree Depth
30
40
50
60
70
80
90
Ave
rage
F1
Sco
re
1 5 9 13 17 21 25 29 33 37Number of Trees
30
40
50
60
70
80
90
Ave
rage
F1
Sco
re
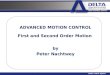
Fig. 4: Analysis of the performance of several RF-based classifiersfor parameter selection. We carried out an exhaustive search in a 2-dimensional array representing the parameter space domain. For eachparameter configuration (number of trees, tree depth), we train theclassifier and evaluate its average F1-score.

φi(u) ∈ [0,1]. Since in addition we know that ∑Ki=1 φi(u) = 1,
the constraint can be relaxed to:
φi(u)≥ 0, ∀i (6)
as a result, Eq.(5) becomes a convex optimisation problem.
Unfortunately the energy cost is non-smooth due to the
L1 norm that appears in the TV term. The Legendre-Fenchel
Transform [18] allows us to trade the non-smoothness of the
prior term for a smooth convex constrained maximisation:
∫
Ω|∇φi(u)|du = max
Ψi(u)
∫
Ω∇φi(u) ·Ψi(u)du (7)
s.t. |Ψi(u)|2,1 ≤ 1 (8)
where Ψi(u) : Ω →R2 is known as the dual function of φi(u).
Although this transformation seems to apparently increase the
complexity, the counterpart is that we can now use well known
first order methods available for smooth problems to find the
global solution of the relaxed energy.
As explained below, we can easily deal with the box
constraints given in Eqs.(6, 8) by projecting the solution of the
optimisation at each iteration to the feasible set when it fails
to meet the constraints. The equality constraint ∑Ki=1 φi(u) = 1
can be included into the energy by introducing Lagrange
Multipliers Γ(u). The relaxed problem to be solved is then:
minφi(u)
maxΨi(u),Γ(u)
1
2
K
∑i=1
∫
Ω∇φi(u) ·Ψi(u)du+
K
∑i=1
∫
Ωφi(u) fi(u)du
+∫
ΩΓ(u)
(
K
∑i=1
φi(u)−1
)
du
(9)
s.t. φi(u)≥ 0, |Ψi(u)|2,1 ≤ 1
To solve the convex saddle point problem in Eq. (9) an
iterative primal dual algorithm [1] is applied. Basically we just
need to interleave gradient ascent steps for the maximisations
with gradient descent steps for the minimisation at each
iteration of the algorithm. In both cases we project the solution
to the feasible set in case the box inequality constraints are
not met. Therefore at each iteration t and per each label Li we
perform the following steps:
• Maximising Ψi(u):
Ψt+1i = Ψt
i +σ∇φ ti gradient ascent
Ψt+1i =
Ψt+1i
max(1, |Ψt+1i |2,1)
projection to feasible set
• Minimising φi(u):
φ t+1i = φ t
i − τ(∇T Ψt+1 + fi +Γti) gradient descent
φ t+1i = max(0, φ t+1
i ) projection to feasible set
• Maximising Γ(u):
Γt+1 = Γt +µ
(
K
∑i=1
φ t+1i −1
)
gradient ascent
• Over-relaxation:
φ t+1 = φ t+1 +θr(φt+1 −φ t)
where σ ,τ and µ control the step size of the gradient steps.
In practice, each variable is updated by performing pixel wise
calculations while the gradient operator ∇ is approximated
by finite differences. The parameters are set up to 1/2,1/4
and 1/5 respectively through the use of preconditioning [19].
The last over-relaxation step allows faster convergence of
the algorithm with 0 ≤ θr ≤ 1. Analogous to the depth map
estimation problem, the primal dual approach followed in this
section allows us to take advantage of general purpose GPU
hardware for parallel computing. For a detailed derivation of
the update equations, we refer the interested reader to [19].
VI. EXPERIMENTS
60 65 70 75 80 85 90Average F1 Score
Z 9
Z \ Z9 Z \ z
vg
Z \ zhg
Z \ zill_inv
Z \ zloc
Z \ zrg-chroma
Z \ zf
Z
PredictionSegmented
Fig. 5: Impact of the feature channels over the performance before(green) and after (blue) multi-label regularisation. In all cases,the smoothed solution outperforms the RF-classifier solution. Muchworse results are obtained when depth features are left out.
Fig. 6: Illustration of the collision-free algorithm to extract a routefrom the ground label.
This section provides quantitative results for experiments
carried out over two different datasets. Our heterogeneous
pipeline (CPU/GPU) was tested in two different hardware
architectures whose details are summarised in Table I. In
addition, we show qualitative results from a live experiment
carried out in an outdoor environment. Our experiments con-
sider a parameter selection analysis as well as an assessment

TABLE I: Hardward architectures
Architecture OS Processor Graphics Card
Server Ubuntu 14.01 Intel(R) Core(TM) i7 CPU @ 3.50GHz GeForce GTX TITAN Black, 6144 MB 2880 CUDA CoresLaptop OSX Mavericks Intel(R) Core(TM) i7 CPU @ 2.3GHz Geforce 750M, 2048 MB, 384 CUDA Cores
TABLE II: Recall, precision and F1 score for different RF models
Ground Obstacle Vegetation Sky
Channels Recall Precision F1 Score Recall Precision F1 Score Recall Precision F1 Score Recall Precision F1 Score
KITTI Dataset
91.83 87.41 89.56 69.59 65.03 67.23 57.24 63.65 60.27 98.20 98.20 98.20Zξ 91.40 87.23 89.27 82.36 70.28 75.84 58.27 76.58 66.19 93.36 97.39 95.34
57.29 53.25 55.20 66.49 59.72 62.93 65.98 79.15 71.97 62.89 60.02 61.42Z\Zξ 69.38 63.16 66.12 76.86 70.05 73.30 77.20 92.21 84.04 61.03 79.58 69.08
89.49 89.75 89.62 83.56 72.00 77.35 66.68 79.70 72.61 93.86 98.52 96.13Z\ zvg 91.28 89.77 90.52 90.71 79.56 84.77 75.74 91.88 83.03 86.80 98.43 92.25
71.03 74.24 72.60 78.63 66.36 71.97 66.16 78.60 71.85 58.40 66.86 62.35Z\ zhg 80.66 89.84 85.01 90.66 76.79 83.15 78.78 91.71 84.76 60.00 82.38 69.43
90.45 90.46 90.46 82.91 73.98 78.19 69.04 78.64 73.53 93.59 98.50 95.98Z\ zillinv 92.61 90.78 91.68 92.89 79.73 85.81 73.99 93.10 82.45 88.53 98.49 93.24
90.34 90.26 90.30 83.35 73.64 78.19 68.77 79.37 73.69 92.44 98.08 95.17Z\ zloc 92.02 91.92 91.97 91.37 82.47 86.69 79.18 91.74 85.00 88.84 98.21 93.29
90.62 89.94 90.28 82.41 72.63 77.21 66.58 77.85 71.77 96.33 98.31 97.31Z\ zrg−chroma 92.71 90.99 91.84 91.18 81.78 86.22 77.35 90.98 83.62 89.06 98.26 93.44
90.49 91.01 90.75 82.65 75.04 78.66 70.61 78.81 74.48 97.58 98.28 97.93Z\ z f 92.45 92.20 92.33 91.02 82.67 86.64 78.87 91.29 84.63 92.17 96.87 94.46
89.62 90.80 90.20 84.67 72.07 77.86 65.68 79.66 72.00 95.32 98.42 96.85Z
92.01 92.32 92.17 91.13 82.24 86.46 78.60 91.34 84.49 90.61 97.32 93.85
Keble College Dataset (Full Resolution)
Z 99.10 94.90 96.95 89.06 93.22 91.10 78.02 98.68 87.14 — — —
Keble College Dataset (VGA Resolution)
Z 98.48 94.55 96.48 86.65 94.13 90.24 73.96 98.71 84.56 — — —
We compared the impact of the channels over the performance before (white rows) and after (gray rows) applying regularisation. For a better analysis,we show the independent precision-recall and f1 score per label. The first column describes the channels used for training. For instance, Z indicates thatall channels have been used, while Z \ z∗ means that a particular channel has been left out. zillinv is the illumination invariant transform, zrg−chroma isthe rg-chromaticity transform, zξ is represented by two contextual transforms over the depth. zhg is the height of the 3D back-projection of the pixelw.r.t the ground. zvg is the vertical disparity gradient. zloc the distance from the pixel to the horizon line. z f are the Leung-Malik (LM) filter bank z f .
TABLE III: Average Running time per task
Task Server (ms (Hz)) Laptop (ms (Hz)) CPU Threads
Depth map estimation 190 ms (5.26 Hz) 1180 ms (0.85 Hz) 1Feature Extraction 25 ms (40 Hz) 22 ms (45.45 Hz) 14Label Probability prediction 10 ms (100 Hz) 6 ms (166 Hz) 10Label Regularisation 155 ms (6.45 Hz) 1020 ms (0.98 Hz) 1Route calculation ≈ 5 ms (200 Hz) ≈ 5 ms (200 Hz) 1
that guides the importance of the feature channels over the
RF-based dataterm. Additionally, we make a comparison of
predicted labels before and after label regularisation.
A. Quantitative experiments
In order to evaluate the proposed image segmentation ap-
proach, we make use of a subset of the KITTI dataset for
which ground truth is provided [20]. The dataset consists of 60
stereo pairs at resolution 1241×376 with perfect annotations
for 12 semantic class labels and ground truth depth maps. For
the purpose of our evaluation, we synthesise the annotations
into ground, vegetation, obstacles and sky. In this case, we
employ 50% of the images for training and 50% for cross-
validation. An additional dataset was collected and manually
labelled, Keble College dataset, consisting of 65 stereo frames
at high resolution (1280×960). Optimised depth maps are also
provided with centimetre accuracy.
1) Parameter selection for RF-based dataterm: The accu-
racy and computational complexity of our RF-based dataterm
depends on two major parameters: the maximum tree depth
and the number of trees in the forest. In order to choose
the best parameters, we analyse their impact over the RF
performance. For the KITTI dataset, we carry out an exhaus-
tive search in a 2-dimensional grid representing the parameter
domain. For each parameter configuration (number of trees,
tree depth) we train a model. Figure 4 shows the average F1
score on the configuration space of parameters over 200 RF
models. Although the performance can be optimised to find
the maximum score, we found that a classifier consisting of
5 trees and 10 tree levels provides a good trade off between
performance and speed.
2) Contribution of feature channels: Our assessment also
takes into account the contribution of each feature channel to
the overall performance. We calculate the precision, recall and
F1 score for different models. Table II details this values per
label. An important part of the evaluation is to measure the
impact of the depth channels (i.e, zξ ). Moreover, we emphasise
the importance of each depth channel by leaving one channel
out at a time (e.g, Z \ zhground). This test is also applied to
the colour channels allowing us to find strong features by
observing whether or not the performance drops significantly
when a particular channel is missing. Figure 5 summarises
this information showing the average F1 score for the KITTI
dataset. Note that the overall performance significantly de-

(a) KITTI Dataset
(b) Live experiment
Fig. 7: Qualitative results of the path following approach. We firstevaluated the collision-free approach in different scenarios. In somesituations the ground segment extends in front of the robot, thus ouralgorithm succeeds to find a route to control the robot forwards. Thereare situations where obstacles, such as, cars are present. We show thatin those cases, our approach provides collision-free paths. When theground segment is small – for example when the robot reaches awall– the estimated path can only provide one or no points. In thiscase, the robot performs pure rotation until it finds a ground regionfor which a plausible path can be estimated.
creases when the depth channels are not considered. In fact,
a model that uses only depth channels performs better than
a model using the rest of the channels. We can also see that
texture features do not appreciably affect the performance.
Table II provides information about the accuracy achieved
per label. For instance, when only depth channels are used, the
ground and the sky labels already exhibit high accuracy. This
is not surprising if we consider that these labels are associated
to very distinctive depths. In contrast, the accuracy obtained
for the obstacle and vegetation labels when just depth channels
are used is lower as there is much higher variability in their
depth.
3) Prediction labels before and after regularisation: Table
II and Figure 5 indicates the difference between the perfor-
mance of the models before and after applying regularisation.
Note that in all the cases, the regularised solution outperforms
the RF-classifier solution.
4) Running Time: Many of the tasks involved in our
pipeline can run in real time. Table III summarises the running
times per task for the two testing architectures. All images are
at VGA (480×640) resolution. Despite stereo depth estimation
and label smoothing require more time than other tasks, the
frame rates are still acceptable to provide reliable paths at live
execution.
B. Live outdoor experiments
For our live outdoor experiment we use a Clearpath Husky
UGV equipped with a forward-facing PGR Bumblebee2 cam-
era. In order to provide reliable collision-free paths, we
implement an algorithm that analyses the ground label in
a bottom-up direction. Figure 6 illustrates the process. The
algorithm tessellates the ground label in cells with adjustable
dimensions. Note that each cell contains only a sub-region of
the segmented label. For each cell, we calculate the centre of
mass. This simple strategy allows us to consider the shape
and orientation of the drivable regions. All the points with
valid centre of mass are concatenated together to form the
desired path. In addition, we impose a safety margin over the
robot dimensions. The robot is modelled as a circular object
of 1.5 meters of diameter. Each feasible point of the circle
is projected into the segmented image. We check for possible
collisions if the projection intersects other labels. The path is
back-projected to 3D space using the available depth map and
the intrinsic camera parameters. For simplicity, our controller
assumes a differential platform such that the path is executed
with a constant linear velocity of 1 m/s. The angular velocity
is derived from the path segments.
The collision-free path approach has been tested in different
scenarios. Figure 7 shows qualitative results on the KITTI
dataset and on our live experiment with a robot moving
autonomously in a quad along hundreds of meters. When
the ground segment extends in front of the robot and there
are no obstacles, the algorithm succeeds to find the simplest
route possible and plans to move the robot forwards following
a straight line. When obstacles such as cars are present,
our approach is able to over take the obstacles following a
collision-free path. Finally, when the ground segment in front
of the robot is not big enough – for example when the robot
reaches a wall– no path can be provided. In this case, the
robot performs a pure rotation until it finds a ground region
for which a plausible path can be estimated. More details
of our approach working at live execution is provided in the
supplementary material https://youtu.be/nvlAf4B-mFY.
VII. CONCLUSIONS
In this paper, we presented a general framework that com-
bines a light weight (shallow) image classifier with convex
regularisation for the general problem of image scene under-
standing. While recent approaches rely on the use of complex
and deep classifiers, we demonstrate that a random forest can
inform our variational formulation with very reliable label
probabilities. In fact, our system requires small amounts of
data during the training phase and yet produces high accurate
results during testing. Finally, we showed that our system is
remarkably fast to provide semantics from image data allowing
a mobile robot to discover and drive collision-free traversable
paths.
REFERENCES
[1] A. Chambolle and T. Pock, “A First-Order Primal-Dual Algorithm forConvex Problems with Applications to Imaging,” J. Math. Imaging Vis.,vol. 40, no. 1, pp. 120–145, May 2011.
[2] K. Bredies, K. Kunisch, and T. Pock, “Total generalized variation,” SIAM
J. Img. Sci., vol. 3, no. 3, pp. 492–526, Sep. 2010.[3] F. Schroff, A. Criminisi, and A. Zisserman, “Object class segmentation
using random forests.” in BMVC, 2008, pp. 1–10.[4] A. Bosch, A. Zisserman, and X. Munoz, “Image classification using
random forests and ferns,” in Computer Vision, 2007. ICCV 2007. IEEE
11th International Conference on. IEEE, 2007, pp. 1–8.

[5] L. Breiman, “Random forests,” Machine learning, vol. 45, no. 1, pp.5–32, 2001.
[6] H. Bostrom, “Estimating class probabilities in random forests,” inMachine Learning and Applications, 2007. ICMLA 2007. Sixth Inter-
national Conference on. IEEE, 2007, pp. 211–216.[7] H. Kong, J.-Y. Audibert, and J. Ponce, “General road detection from a
single image,” Image Processing, IEEE Transactions on, vol. 19, no. 8,pp. 2211–2220, 2010.
[8] M. Aly, “Real time detection of lane markers in urban streets,” inIntelligent Vehicles Symposium, 2008 IEEE. IEEE, 2008, pp. 7–12.
[9] H. Dahlkamp, A. Kaehler, D. Stavens, S. Thrun, and G. R. Brad-ski, “Self-supervised monocular road detection in desert terrain.” inRobotics: science and systems, vol. 38. Philadelphia, 2006.
[10] P. Y. Shinzato, D. F. Wolf, and C. Stiller, “Road terrain detection:Avoiding common obstacle detection assumptions using sensor fusion,”in Intelligent Vehicles Symposium Proceedings, 2014 IEEE. IEEE,2014, pp. 687–692.
[11] R. Mohan, “Deep deconvolutional networks for scene parsing,” arXiv
preprint arXiv:1411.4101, 2014.[12] L. Ladicky, P. Sturgess, C. Russell, S. Sengupta, Y. Bastanlar,
W. Clocksin, and P. H. Torr, “Joint optimization for object classsegmentation and dense stereo reconstruction,” International Journal of
Computer Vision, vol. 100, no. 2, pp. 122–133, 2012.[13] J. M. Alvarez, T. Gevers, Y. LeCun, and A. M. Lopez, “Road scene
segmentation from a single image,” in Computer Vision–ECCV 2012.Springer, 2012, pp. 376–389.
[14] A. Kendall, V. Badrinarayanan, , and R. Cipolla, “Bayesian segnet:Model uncertainty in deep convolutional encoder-decoder architecturesfor scene understanding,” arXiv preprint arXiv:1511.02680, 2015.
[15] T. Scharwachter and U. Franke, “Low-level fusion of color, textureand depth for robust road scene understanding,” in Intelligent Vehicles
Symposium (IV), 2015 IEEE. IEEE, 2015, pp. 599–604.[16] P. Pinies, L. M. Paz, and P. Newman, “Dense and swift mapping with
monocular vision,” in International Conference on Field and Service
Robotics (FSR). Toronto, ON, Canada, 2015.[17] C. Zach, D. Gallup, J.-M. Frahm, and M. Niethammer, “Fast global
labeling for real-time stereo using multiple plane sweeps.” in VMV, 2008,pp. 243–252.
[18] R. T. Rockafellar, Convex Analysis. Princeton, New Jersey: PrincetonUniversity Press, 1970.
[19] T. Pock and A. Chambolle, “Diagonal preconditioning for first orderprimal-dual algorithms in convex optimization,” in IEEE Int. Conf. on
Computer Vision (ICCV), 2011, pp. 1762–1769.[20] L. Ladicky, J. Shi, and M. Pollefeys, “Pulling things out of perspective,”
in Proceedings of the IEEE Conference on Computer Vision and Pattern
Recognition, 2014, pp. 89–96.












![Closed loop Urbanism [Autosaved]](https://img.pdfslide.us/doc/110x75/58edac181a28aba90c8b4605/closed-loop-urbanism-autosaved.jpg)













