Embed Size (px)
Citation preview

On Constructing Interference-Aware k-Fault ResistantTopologies for Wireless Ad hoc Networks
MD. EHTESAMUL HAQUE1 , ASHIKUR RAHMAN 2
1 Department of Computer Science, Rutger University, NJ 08854, USA,‡2 Department of Computer Science, University of Calgary, T2N1N4, Canada,¶
Received 15 October 2011; In final form 20 March 2012
The most fundamental problem in wireless ad-hoc networks isto determine a connectedcommunication subgraph that satisfies desirabletopological propertiesby assigning ap-propriate transmission power to each node. Some of the properties considered by a vastmajority of researchers include minimum-energy, fault tolerance, minimum interfer-ence, and bounded node degree. However preserving two or more combination of theseproperties at the same time is harder to achieve and often overlooked by the researchcommunity. In this paper, we propose a topology control algorithm that preserves con-nectivity and combines two other important properties, e.g, (a) minimum interference,and (b) fault tolerance. Interestingly, these two properties create a fundamental trade-off by running against each other. In one end, interference can be reduced by droppinglinks that create high interference. On the other end, dropping too many links make anetwork more susceptible to node failure/departure. Thus dropping high interferencelinks while keeping the network significantly connected is an important goal to achieve.We achieve such goal by formulating the problem of constructing minimum interferencepath preserving and fault tolerant wireless ad hoc networksunder the same frameworkand then provide algorithms, both centralized and distributed with local information, tosolve the problem. Moreover, for the first time in literature, we conceive the conceptof fault tolerant interference spanner and provide a local algorithm to construct suchspanner of a communication graph.
Key words: graph theory, network topology, interference, fault tolerance, wireless ad hoc net-works, interference-aware topology, stretch factor, sparse topology.
1 INTRODUCTION
Wireless ad hoc networks are said to be networks without networking. Due to the potential bene-fits, application and ease of deployment wireless ad hoc networks have gained popularity among theresearchers during the last two decades. Research on generic wireless ad hoc networking also rami-fied to special types of networking like wireless mesh networks, wireless sensor networks, vehicular
‡ email:Email: [email protected]¶ email:Email: [email protected]
1

networks, underwater acoustic networks, radio frequency identification (RFID) networks, to name afew.
One of the prime challenges in all types of wireless networksis channelinterferencecaused byconcurrent transmissions. A transmission from nodea is said to beinterferingwith another nodeb if it is unintentionally received byb. Interferences coming from neighboring nodes affect correctreception at an intended receiver (i.e. generates collision), consequently reduces throughput andincreases delay. Avoiding collisions also reduces the number of retransmission attempts requiredbefore the ultimate successful delivery of a packet and naturally reduces energy consumptions byavoiding those unnecessary retransmissions. Since energyis a scarce resource at any device of adhoc networks, implementing interference aware energy optimized protocols is a necessity for suchnetworks. Reducing interference also has some added benefits. For example, nodes can increasespatial reuse of frequency and reduce contentions for medium access by using shorter and less inter-fering links.
Nodes in ad hoc networks may reduce interference by loweringtheir transmission powers to re-duce the covered area of a data transmission and eventually interfere less number of nodes. Anothersimple approach to reduce interference is to identify linksthat can generate high interference andavoid transmitting over those links. However, by excludingtoo many neighbors from transmissioncoverage area (in the former case) or by dropping too many links in a network (in the later case) anetwork becomes more susceptible to node/link failures. Since nodes may join or leave frequently ina unpredictable manner and links in a wireless environment are unreliable due to high bit error rates,node and/or link failures may be quite disastrous for any wireless ad hoc networks. Interestingly,it is possible to mitigate this problem by incorporating adequate path redundancy into the networktopology. For example, ak + 1 connectednetwork topology may still continue to operate with atmostk node/link failures.
The most fundamental problem in wireless ad-hoc networks isto determine a connected commu-nication graph that satisfies a topological property by finding appropriate transmission power assign-ment of each node. Some of the properties that are consideredby a vast majority of researchers areminimum-energy, fault tolerance, minimum-interference,load balancing etc. However preservingtwo or more combination of these properties is very difficultto achieve and often overlooked by theresearch community. For example, a topology control algorithm may combine fault tolerance withminimum interference property by generating ak (> 1) connected communication graph that pre-serves all minimum interference paths. Informally, aminimum interference pathis the path betweena pair of nodes(x, y) that enables communication betweenx andy producing minimum interferencein the network. Preservation of one or more least interference path(s) will allow the routing layerto select a path for routing data packets with minimum interference at first place and keep selectinglow interference paths in the event of failure of nodes or links on the minimum interference path.The idea of this unificationi. e.providing solution tofault toleranceandminimum interferenceusingsingle algorithm is the major contribution of this paper.
In this paper, we have formulated two variations of the combined fault tolerance and interferenceaware topology control problem for ad hoc wireless networks:Minimum Interference Bi-connected Communication Networks (MIBCN) : Given a communi-cation graph construct an induced sub graph by reducing the total number of edges which is bi-connected and the minimum interference path between every pair of nodes is preserved.Bi-connected Interference-aware Spanners (BIS): Given a communication graph construct aninduced subgraph by reducing the total number of edges whichis bi-connected and between any pair
2

of nodes there exist (at least) two node disjoint paths each having interference within some constantfactor of the minimum interference between them.
For both MIBCN and BIS problem we provide a central and a distributed local algorithm. Cen-tral algorithms assume that the global topology information is available. On the other hand localalgorithms assume only a limited neighborhood information(up to 2-hop). Every node locally runsthis algorithm to generate an induced subgraph of the neighborhood graph and superposition of ev-ery node’s local computation constructs a graph which preserves the desired properties globally. Wehave also provided an explicit procedure for calculating link interference locally which was not avail-able in the literature before. By providing rigorous experimental results we show the effectivenessof our algorithms.
The rest of the paper is organized as follows. We summarize related works in Section 2. Section3 discusses how to quantitatively measure interference andalso provides formal definition of theproblems. Section 4 and Section 5 provide the algorithms andtheir correctness for the MIBCN andBIS problem respectively. Section 6 provides a generalizedsolution for the MIBCN problem alongwith the correctness of the solution. Simulation results have been discussed in Section 7 and Section8 concludes the paper with some directions for future works.
2 RELATED WORK
Most of the works on topology control addresses energy minimization. Rodoplu et al. [23] first con-ceived the idea of minimum energy mobile wireless networks.They provided a distributed algorithmto reduce transmission range of the nodes while keeping the network connected and preserving mini-mum energy paths between each pair of nodes. Later on, their work was improved in [17]. However,none of these works addresses the issue of interference explicitly.
There was an implicit assumption that minimizing energy also minimizes interference due tothe fact that energy minimization tends to drop longer linksas energy consumption increases ex-ponentially with the length of the links. But, Burkhart et al. [5] first contradicted this assumption.By giving specific definition and quantification of interference, they showed that recently proposedenergy aware algorithms may even show worst performance in terms of interference. Since then,there are myriad of works focusing explicit interference minimization in topology control research.Li et al. [16] and Moaveninejad et al. [21] provided central and local algorithms to minimize themaximum and average interference of a network by constructing interference based single-hop localMinimum Spanning Tree (I-MST). In their algorithm each nodedevelops local MST with its ownneighborhood graph and the topology becomes a global spanning tree when superposition of all thenodes’ local computation is considered. Xu et al. [26] defined path interference formally and pro-vided a local algorithm to construct topology with minimal path interference. However, their workdoes not address the issue of fault tolerance at all.
There are some recent works addressing fault tolerance [22], [19], [1]. Penrose [22] first studiedk connectivity in a geometric random graph. Although the result is similar to the result given in [2]but Penrose proposed that a graph becomesk connected almost certainly when the minimum degreeof the graph isk. The result is significant because it relates a global property, k connectivity, to alocal property,node degree. None of these works considers interference explicitly.
The work that closely matches with our work is FLSS provided in [14]. However, there aresome major differences:(i) FLSS focuses on energy while we focus on interference. Measuringinterference is a nontrivial task as we discuss while solving MIBCN problem locally,(ii) FLSS
3

does not preserve minimum energy paths while our local solution to MIBCN preserves minimuminterference paths, and(iii) FLSS needs special treatment of links with tied weights while linkweight tie does not create any problem in our solution.
Next we move on to the works related to spanners. After the introduction of spanner in the formof geometric spannerby Chew [6], spanners have found applications in different areas. Relativeneighborhood graph (RNG) and Gabriel graph (GG) are spanning structures that have been firstused in routing of communication networks by Karp et al. [12]and Bose et al. [3]. The conceptof Yao graph [27] is used by [24] and [18] to generate spanner topologies. Localized delaunaytriangulations [15] and Restricted Delaunay Graph (RDG) [9] are two other planar spanners for adhoc wireless networks. These works do not consider interference explicitly.
Burkhart et al. [5] proposed central (LISE) and local algorithm (LLISE) to construct interferenceaware length spanner that do not provide fault tolerance. Liet al. [16] provided local algorithmto construct interference aware power spanners. Xu et al. [26] provided an algorithm to constructminimal energy interference spanner. Czumaj et al. [8] provided a greedy algorithm that constructsak fault tolerant distance spanner in which every vertex is of degreeO(k). Note that, to the best ofour knowledge, there is no work addressing fault tolerant interference spanners.
A preliminary version of this work appeared in [10]. The additional contributions of this paperw.r.t. this preliminary version is summarized as follows: (i) by providing a local distributed algo-rithm for constructingk fault tolerant andk+ 1 minimum interference path preserving topology weseek to fill a notable hole of generalization of result in the earlier version of this paper, (ii) we alsoprovide correctness of the generalized algorithm, (iii) wealso present more rigorous experimentalresults to fully evaluate the performance of the proposed solutions in terms of delay and energyconsumption.
3 PROBLEM FORMULATION
3.1 Preliminaries
Formally, an ad hoc wireless network can be modeled by a communication graphG = (V,E) whereeach node of the network corresponds to a vertexv ∈ V and each link corresponds to an edgee ∈ E.A (wireless) link betweenu andv exists ifu andv are within the mutual transmission range of eachother. A topology control algorithm computes a subgraph ofG preserving some desirable propertiesand satisfying some given constraints. We assume that nodescan vary their transmission rangesdepending on the position of the immediate receiver up to a maximum which is fixed for every node.We also assume that each node knows its position via GPS devices or similar techniques.
Interferenceis quantitatively measured as follows. Suppose a nodeu is transmitting to nodev,another nodew interferesthe reception ofv if v is unable to successfully receive the transmissionfrom u due to the transmission fromw. Generally, a nodev may not correctly decode the trans-mission from nodeu if the signal to interference and noise ratio (SINR) perceived byv is belowa certain threshold. While this threshold is dependent on various factors like antenna sensitivity ofreceivers, signal modulation techniques and other environmental factors, it is well understood that athird nodew interferes nodev’s signal reception from nodeu if w is located at a nearby position ofv and transmitting simultaneously withu. The distance (region) within which a nodew interferesanother node is called theinterference range (region)of w. For simplicity of analysis, we assumethat the interference range and the transmission range is same for any nodew. However, the solutionis also applicable where the assumption does not hold. For instance, we may need to gather more
4

information if interference range is larger than transmission range. For example, if the interferenceregion is less than twice of the transmission range, a node needs to construct its neighborhood graphbased on HELLO messages propagated from up to two hop neighbors.
While sending some data to nodev, a nodeu interferes the nodes that are nearer tou thanv. Theset of nodes interfered byu’s transmission tov is calledunidirectional interference setfrom u tov and is denoted byUIS(u, v). Formally, letdis(u, v) be the euclidean distance betweenu andv,then:
UIS(u, v) = {w ∈ V |dis(u,w) ≤ dis(u, v)}
Note that, due to directional dependencyUIS(u, v) andUIS(v, u) are generally not equal. The setof the nodes interfered whilev is communicating tou is:
UIS(v, u) = {w ∈ V |dis(v, w) ≤ dis(v, u)}
The number of nodes interfered byu’s transmission tov is calledunidirectional interference numberfrom u to v and is denoted byUIN(u, v). It is easy to see thatUIN(u, v) = |UIS(u, v)|. Theinterference setof an edgee = (u, v) is the set of nodes that are interfered while eitheru or v istransmitting to each other (one might be sending data and theother might be acknowledging), andhence always considered as bidirectional. Mathematically, interference setIS of an edgee = (u, v)
is,
IS(u, v) = UIS(u, v) ∪ UIS(v, u)
Interference numberof an edgee = (u, v), denoted byIN(u, v), is the cardinality of the interferencesetIS(u, v). Thus,IN(u, v) ≤ UIN(u, v) + UIN(v, u).
Finally, interference numberof a pathR, denoted byINP (R) is the sum of the interferencenumbers of the edges ofR, i.e. if R =< v1, v2, . . . , vn > is av1 ∼ vn path then,
INP (R) =
n−1∑
i=1
IN(vi, vi+1) =
n−1∑
i=1
|IS(vi, vi+1)|
SupposeRp is the set of paths betweenv1 andvn. Then theminimum interference path(MIP)betweenv1 andvn is mathematically defined as,
MIP (v1, vn) = minR∈Rp
INP (R)
3.2 Problems DefinitionGiven a bi-connected communication networkG = (V,E) where each vertex denotes a wirelessnode and weight of an edge(u, v) is IN(u, v). We focus on the following two problems:
Problem 1 (MIBCN). Construct a subgraphH = (V,E′) of G by reducing the total number ofedges such that for every pair of verticesu, v ∈ V , the minimum interference path betweenu andvis preserved andu, v remains connected even after deletion of any vertexw ∈ V , w 6= u, v.
Problem 2 (BIS). Construct a subgraphH = (V,E′) of G by reducing the total number of edgessuch that for every pair of verticesu, v ∈ V , there exist (at least) two node disjoint pathsR1 andR2
betweenu, v in H such that bothINP (R1) andINP (R2) are less than or equal tot×MIP (u, v)
in G, for any positive constant,t > 1.
The subgraph constructed in problem BIS is calledinterference t-spannerand the parametert isknown as thedilation factoror stretch factorof the spanner. Moreover, this solution is guaranteedto be bi-connected due to the way the problem is formulated.
5

3.3 A note on interference modelThis paper assumes a simple interference model which is traditionally known asinterference rangemodelin the literature [11]. This interference range model assumes a fixed communication rangeand a fixed interference range. To be precise, let us denote the transmitter of any linkk by ku andthe receiver bykv. Suppose the set of all possible links in the network isL. Then a packet receptionfrom the transmitter on linkm is successful if for each linkl ∈ L \ {m}, we have:
D(lu,mv) ≥ RI and D(mu,mv) ≤ RC
whereD(X,Y ) denotes the distance between nodesX andY , RI is the interference range, andRC is the communication range. Although we observe the use of many other interference modelsin the literature such asprotocol model, SINR-based model, capture threshold modeletc, we stickourselves into this model mainly because of the following two reasons.
First of all, we like to argue that the behavior of some other complex models could easily becaptured by simply tuning our algorithms. For example a morecomplex model called Quasi-unitdisk graph model assumes that the interference between two nodes depends on different geographicfactors like presence of hill or quality of air between them.While their assumptions are valid, it ispossible to capture this behavior within our protocol by simply using our protocol-generated HELLOmessages. More precisely, if presence of a hill between two nodes affects the amount of interference,the reception of HELLO messages will also get affected. Consequently the interference number ofthe link between two nodes will get adjusted accordingly in our protocol.
Secondly, many topology control algorithms may perform poorly with other interference models.One such example is the well known SINR-based interference model. In this model the interferenceis quantified asadditive interferenceby treating the sum of all the other on-going signal transmis-sions and environmental disturbances, as noise. Using thismodel the successful packet receptionprobability largely depends on the traffic patterns presentin the network. While our paper doesnot consider any dynamic nature of data transmission, topology control considering traffic patternslargely depends on data transmission properties (e.g. how often nodes transmit, variations in packetsize etc.). As a result topology control policy designed forone type of data transmission pattern islikely to perform poorly with other types of traffic patterns.
4 MINIMUM INTERFERENCE PATH PRESERVING FAULT TOLERANT STRU CTURES
4.1 Centralized Algorithm for the MIBCN ProblemAt first, we propose a central algorithm using global knowledge of every node’s location for theMIBCN problem. This algorithm is primarily for theoreticalinterest. The algorithm starts withthe calculation ofIS(u, v) andIN(u, v) for each edgee = (u, v). The weight of each edge isthen assigned to beIN(u, v). After that, the algorithm satisfies the two constraints specified inthe MIBCN problem for each pair of vertices. For the first constraint, the minimum interferencepath between each pair of vertices is determined and added tothe output topology. This minimuminterference path is then deleted (both vertices and edges)from the original graph and a secondminimum interference path, node disjoint with the first one,is computed. This path is also addedto the output topology. This simple method ensures conformity to both the constraints for each pairof vertices. In order to determine the minimum interferencepath between any pair of nodes, weuse the well-known shortest path algorithm devised by Dijkstra [7]. Note that the interference ofan edge (i.e.,IN(u, v)) is always non-negative which makes Dijkstra’s algorithm applicable in this
6

case. The central algorithm is listed as Algorithm 1. The subgraph generated by this algorithm iscalledCentral Minimum Interference Bi-connected CommunicationNetworks (CMIBCN).
Algorithm 1 Algorithm to construct CMIBCN
for each edgee with endpoints(u, v) doCalculate the interference of edgee by determining the cardinality of the setIS(e)
end forEo = φ
for each node pair(x, y) doSelect the minimum interference pathP1 betweenx ∼ y
Delete all the nodes∈ P1 exceptx andySelect the minimum interference pathP2 betweenx ∼ y
Eo = Eo ∪ E(P1) ∪ E(P2)
Put back all the deleted nodes and edges∈ P1
end forEdges inEo is the final output
Theorem 4.1. CMIBCN is a minimum interference path preserving bi-connected communicationnetwork which can be built in time complexityO(|V |2|E| log |V |).
Proof. The most important part of Algorithm 1 is the secondfor loop. It executes once for each pairof nodes. PathP1 is the minimum interference path between a pair of nodes. Since all the edges ofP1 is retained in the final output,Eo must contain the edges that are on the minimum interferencepath between a pair of nodes. Again,P2 is obtained after deleting all the internal vertices ofP1.Thus presence of the edges ofP2 ensures that there is another path which is node disjoint withthe minimum interference path in the final output. So, Algorithm 1 constructs a topology whichpreserves minimum interference path and provides a path which is node disjoint with the minimuminterference path for each pair of nodes.
Now, the time complexity of first for loop can be at mostO(|E| × |V |) since the maximumcardinality ofIS(e) is equals to|V |− 2. Second for loop runs
(
|V |2
)
times, Dijkstra’s algorithm withpriority queue runs inO(|E| log |V |) and all other steps will take at mostO(|E|) steps. Thus thetotal time complexity of Algorithm 1 isO(|E||V |+ |V |2|E| log |V |) = O(|V |2|E| log |V |).
4.2 Local Distributed Algorithm for the MIBCN Problem
Next we move on to locally construct minimum interference path preserving bi-connected commu-nication networks. Our algorithm works in the following three steps:
(i) Neighbor Discovery: Each node gathers information about its neighbors and determines inter-ference numbers of the associated edges.
(ii) Topology Generation: Each node independently executes an algorithm to decide about theneighborhood set that is enough to preserve the minimum interference path and bi-connectivity prop-erty.
(iii) Bi-directional Topology Generation: Each node sends PROPOSE message to the neighborsin output topology. If any of the nodes agree to keep an edgee, e is retained in the bi-directionaltopology. This is an optional step.
Now we describe each of these steps in more details.
7

va
b
c
d
f
hu
e
g
ij
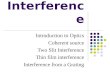
FIGURE 1Determining edge level interference
Neighbor Discovery
Neighbor discovery is needed to get a measure of the interference in the locality of a node. Eachnode initiates this process by sending a HELLO message that contains id and position of the sendingnode. Note that the measurement of interference with one hopneighbors needs knowledge of twohop neighbors. The reason is explained in Figure 1. Here the interference of the edge(u, v) is beingdetermined. Transmission range of the nodeu is shown as dashed circle. Two solid circles centeredatu andv enclosed the nodes that are interfered while there is a bi-directional communication overthe link (u, v). So IS(u, v) = {a, b, c, d, e, f, g, h}. However nodeh is out of the transmissionrange ofu. Nodeh is one hop neighbor ofv and thus two hop neighbor ofu. In general, to measureinterference up toh hop a knowledge of up toh+ 1 hop neighbors is required.
The knowledge of two hop neighbors is gathered from the HELLOmessages sent by the onehop neighbors. However, we propose not to add the position ofeach neighbor in HELLO message.Rather, HELLO messages contain a series of tuples< node id, interference number > whereinterference number is the total nodes interfered when the sender of this message is transmitting to aspecific neighbor denoted bynode id. More specifically, nodeu calculates the interference numberfor a neighborv by determining the cardinality of the set{w ∈ V |dis(u,w) ≤ dis(u, v)}. We termthis technique aslimited two hop information propagation. This mechanism reduces the data trans-mission by almost75% than the traditional two hop information propagation in< id, position >
format.Let us describe the process of determining interference using an example. Consider Figure 1. To
determine the interference of edge(u, v), nodeu must know the elements of two sets. The set ofthe nodes that are interfered whenu transmits tov and the set of nodes that are interfered whenv
transmits tou. Between these two sets, all nodes of the second set may not beneighbor ofu. Thusu must rely onv to know about these nodes. Figure 2 shows the HELLO message transmitted byu andv with respect to the network shown in Figure 1. The numbers below each neighbor is theinterference number fromu to its neighbors. For example,u has added a column in its HELLOmessage witha and0 means thatu does not interfere any node while transmitting toa. Note that,a may interfere some nodes while transmitting tou but that is not included inu’s HELLO message.Similarly,u interferes3, 4 and5 nodes while transmitting data to noded, e andv, respectively. Someimplicit information about the distance from the neighbor is also conveyed in this kind of HELLO
8

HELLO message ofuNeighbor a b c d e v i ...
Interference number 0 1 2 3 4 5 6 ...
HELLO message ofvNeighbor f g e d h u j ...
Interference number 0 1 2 3 4 5 6 ...
FIGURE 2HELLO messages
messages. The HELLO message ofu tells that it does not interfere with any node while transmittingto a meansa is the nearest neighbor ofu. Moreover, interference number fromu to a, IN(u, a) = 0
and interference number fromu to b, IN(u, b) = 1 indicates thata is the only node that is beinginterfered whenu transmits tob.
Now we discuss how nodeu can determine interference number of the edge(u, v) from HELLOmessage ofu andv. Hello message ofv tells that it can transmit to nodeu interfering5 nodes andthe set of the nodes that are nearer tov thanu is {f, g, e, d, h}. Again, nodeu itself determines thatit interferes5 nodes while transmitting tov and the set of nodes interfered is{a, b, c, d, e}. Thusnodeu can easily determine the interference set of the edge(u, v), IS(u, v) = {f, g, e, d, h} ∪
{a, b, c, d, e} = {a, b, c, d, e, f, g, h}. ThusIN(u, v) = |IS(u, v)| = 8. In this way, nodeu candetermine the interference of all the edges of its neighborhood graph,Gu.
Definition 4.2 (Neighborhood Graph). LetG = (V,E) be a communication graph andNu be theneighborhood of nodeu, i.e. Nu is the set{w|w ∈ V and dis(u,w) ≤ rmax} wherermax is themaximum transmission range ofu. Then the Neighborhood Graph ofu, Gu = (V (Gu), E(Gu)), isthe induced subgraph ofG byV (Gu) = Nu.
Neighbor discovery procedure finishes once a nodeu gathers the full information about its neigh-borhood graph,Gu.
Topology Generation
In this step each node executes the local algorithm to generate a global minimum interference andbi-connected topology. A nodeu generates the subgraphHu of its neighborhood graphGu suchthatV (Hu) = V (Gu) and for any vertexv ∈ V (Gu), the minimum interference path fromu to v
is preserved inHu and more than one path fromu to v is also preserved. The basic idea is to keepan edgee unless we know the graph is going to preserve minimum interference and bi-connectedproperty withoute. We preserve the minimum interference path, delete it and then preserve thesecond minimum interference path for each pair of nodes(u, v) whereu is the node executing thealgorithm andv is neighbor ofu. The steps of algorithm executed byu is shown in Algorithm 2.
9

Algorithm 2 Algorithm to construct LMIBCN
Run Neighbor Discovery procedure and construct neighborhood graphGu = (Vu, Eu)
Nf = φ
for each nodev ∈ V (Gu) doSelect the minimum interference pathP1 betweenu ∼ v
Delete all the nodes∈ P1 exceptu andvSelect the minimum interference pathP2 betweenu ∼ v
Let w2 be the interference of the pathP2
if w2 is less than the interference of the edge(u, v) thenNf = Nf ∪ v
end ifPut back all the deleted nodes and edges∈ P1
end forNl = V (Gu)−Nf is the neighborhood set ofu
In Algorithm 2 an edgee = (u, v) is deleted only if we find two other node disjoint paths betweenu andv with lower interference than the interference of edgee. The rationale behind this is ifthere exist two other lower interference paths, the edgee can not be the minimum interference pathbetweenu andv. Therefore, it cannot be part of the minimum interference path between any otherpair of vertices. An instance of this algorithm is executed individually by all nodes and the unionof the subgraphs locally produced by all nodes is calledLocal Minimum Interference Bi-connectedCommunication Networks (LMIBCN).
Bi-Directional Topology
Bi-directional links facilitates different desirable characteristics like link level acknowledgmenttransmission, dynamic route discovery etc. To generate a bi-directional topology, it is required toeliminate directional edges either by making them bi-directional with the addition of edges in theopposite direction or with the deletion of directional edges completely. Both of these methods willwork for constructing LMIBCN. So, we discuss approach of adding directional edges.
Each nodeu sends a PROPOSE message to every nodev ∈ Nl. A nodev receiving PROPOSEmessage fromu, checks its ownNl for the presence ofu. If u is not present thenv addsu as aneighbor in the final neighbor listN+
l .
Proof of Correctness
To prove the correctness of LMIBCN we prove that Algorithm 2 constructs a topology that—(i) pre-serves minimum interference paths and, (ii) is bi-connected. For the first one, we have the followinglemma,
Lemma 4.3. LMIBCN is a topology where all minimum interference paths are preserved.
Proof. Let by contradiction, there is a pair of nodesx andy for which minimum interference pathis not preserved. Let us assume that the minimum interference path betweenx andy in graphG isPxy =< x= v1, v2, . . . , vn = y >. If Pxy is not preserved in LMIBCN then there must be at leastone edge(vi, vi+1) which is not preserved. Thus, when Algorithm 2 is executed atnodevi, it musthave found at least twovi ∼ vi+1 paths which have less interference than the edge(vi, vi+1). ButPxy is the minimum interference path betweenx andy and(vi, vi+1) is an edge of this path. So, the
10

xy
u v
P
P
P’
P
Pxu
vy
2
FIGURE 3Two paths between node pairx, y
direct edge betweenvi andvi+1 must be the minimum interference path between them. Otherwise,we may replace the edge(vi, vi+1) by less interference path between them inPxy and get a lowerinterference path betweenx andy thanPxy which is a contradiction. Thus, every edge on everyminimum interference path is preserved by Algorithm 2. Therefore, all minimum interference pathsare preserved in LMIBCN.
Now we move to the proof of bi-connected property.
Lemma 4.4. Let u andv be two vertices in a bi-connected graphG. If u andv are bi-connectedafter removal of edge(u, v) thenG− (u, v) is also bi-connected.
Proof. Let, x andy be two arbitrary vertices. We have to prove thatx andy are bi-connected inG− (u, v). SinceG is a bi-connected graph, there must be at least two node disjoint paths betweenx andy. Suppose,P1 andP2 are two such paths. Nodesu andv are bi-connected both inG andG − (u, v). Let, P andP ′ be two node disjoint paths betweenu andv in G − (u, v). Since,P1
andP2 are node disjoint paths, both of them can not contain the edge(u, v). We have the followingcases:
(i) If both P1 andP2 does not contain edge(u, v) then both the paths remain intact inG− (u, v).So,x andy are bi-connected inG− (u, v).
(ii) Since at most one of them can contain edge(u, v) we assume, without loss of generality, thatP1 contains the edge(u, v). We also assume, pathP1 can be divided into three parts, a path fromxto u, Pxu, then the edge(u, v) and finally the path fromv to y, Pvy . Figure 3 gives a depiction ofthe paths. We note that,P2, Pxu andPvy all three are mutually node disjoint. So, if we now deleteany single nodew from the graphG− (u, v), it can not disconnect all three pathsP2, Pxu andPvy
simultaneously. Ifw ∈ V (Pxu) or w ∈ V (Pvy), thenx andy remains connected throughP2. Ifon the other hand,w ∈ V (P2) then, sinceP andP ′ are node disjoint,w cannot disconnect both ofthem simultaneously. Thus there will be a path betweenx andy usingPxu, P or P ′ (which one isnot disconnected by deletion ofw) andPvy. Thusx andy are bi-connected inG− (u, v).
So,G remains bi-connected after deletion of(u, v).
From Lemma 4.4, we can say that any nodeu can decide not to keep the edge(u, v) if u knowsu andv are bi-connected without the edge(u, v). However, it is important that the other nodes keepthe edges that nodeu considered for bi-connectivity ofu andv. This is ensured by considering onlythe paths with less interference than a direct edge. The following lemma shows that,
11

Lemma 4.5. LetG andG′ be two undirected graph such thatV (G) = V (G′). If G is bi-connectedand every edge(u, v) ∈ E(G)−E(G′) satisfies thatu has at least two node disjoint paths tov withless interference than(u, v) thenG′ is also bi-connected.
Proof. Let,E(G) − E(G′) = {e1, e2, . . . , em} wherew(ei) ≥ w(ei+1) for 1 ≤ i ≤ (m − 1). Wedefine a series of graphsGi for 1 ≤ i ≤ m such thatGi = G−{e1, e2, . . . , ei} i.e. V (Gi) = V (G)
andE(Gi) = E(G) − {e1, e2, . . . , ei}. We note that,Gi andGi+1 is related asGi+1 = Gi − ei+1
andGm = G′. We also assume,G0 is the original graphG. Now we proveGm is bi-connected byinduction.
Basis: Given graphG0 is bi-connected.Inductive step: Let, graphGi is bi-connected. According to the hypothesis, there are twonode
disjoint paths between the endpoints of edgeei+1 with interference less than the interference of edgeei+1. Thus, the endpoints of edgeei+1 are bi-connected even after deletion of the the edgeei+1. So,by Lemma 4.4 we can say that graphGi − ei+1 is also bi-connected. But,Gi − ei+1 is nothing butGi+1. So, graphGi+1 is also bi-connected.
So, by induction the graphGm = G′ is bi-connected.
By combining Lemma 4.3 and Lemma 4.5 we deduce:
Theorem 4.6. LMIBCN is a minimum interference path preserving bi-connected topology.
5 INTERFERENCE-AWARE FAULT TOLERANT SPANNERS
5.1 Local Distributed Algorithm for the BIS ProblemWe focus on developing a distributed algorithm that constructs a bi-connected interference spannerfrom a given graph based on local information only. As there may exist numerous paths betweena pair of vertices that satisfies the spanner property it is very challenging to decide which pathsshould be kept during construction of spanners. Here we imitate the work of [8] to generate aninterference spanner. In [8], Czumaj and Zhao provided a central algorithm to construct fault toler-ant geometric spanners. Here we show that there algorithm can be used as a local algorithm withslight modifications. Most importantly, we have to make surethat there is no tie remaining amongthe costs of the edges. To break the ties between edges we use the id’s of the endpoints of theedges. Let us define two functionsMIN andMAX as follows:MIN(u, v) = min(id(u), id(v))
andMAX(u, v) = max(id(u), id(v)). Let e1 = (u1, v1) ande2 = (u2, v2) be two edges then wedefinecost(e1) > cost(e2) if,
|IS(e1)| > |IS(e2)| or,
|IS(e1)| = |IS(e2)| ∧ MIN(u1, v1) > MIN(u2, v2) or,
|IS(e1)| = |IS(e2)| ∧ MIN(u1, v1) = MIN(u2, v2)
∧ MAX(u1, v1) > MAX(u2, v2)
In all other case, we letcost(e1) < cost(e2).After discovering the neighbors each nodeu at first sorts the edges of its neighborhood graph
Gu according to the costs of the edges (the cost an edge is set to its interference number). Thenedges are taken in ascending order and added in a setEs unless its endpoints have already two nodedisjoint paths with spanner property. The nodes that are adjacent using the edges ofEs are the final
12

Algorithm 3 Algorithm to construct LBIS
Run Neighbor Discovery procedure and construct neighborhood graphGu = (Vu, Eu)
Sort the edges ofEu in increasing order of costEs = φ
for each edge(u, v) taken in ascending orderdoif two node disjoint paths betweenu andv using only edges fromEs with interference less thant times of interference of(u, v) cannot be foundthen
Add (u, v) toEs
end ifend forNodes adjacent using only the edges fromEs comprise the neighbor set of nodeu in the finaltopology
neighbors of nodeu. The local subgraphs generated by each nodes combindly produce a topologyfor BIS problem which is dubbed asLocal Bi-connected Interference Spanner (LBIS). Algorithm 3summarizes the total procedure.
Once the neighbor set is defined, each node may send a PROPOSE message using the sameprotocol as explained in Section 4.2 and generate a bi-directional topology.
5.2 Proof of Correctness of Algorithm to generate LBISTo prove the correctness of Algorithm 3 we need to show that LBIS is bi-connected and for eachpair of verticesu, v, there is at least two paths betweenu andv with spanner property. To prove this,we use an indirect approach. First, we state the central counter part of Algorithm 3 that generatesCentral Bi-Connected Interference Spanner (CBIS). We prove the correctness of central algorithm.Finally, we prove that the local algorithm generates a topology that is super set of the output of thecentral algorithm. The central algorithm is given in Algorithm 4. This central algorithm and theproof of Lemma 5.1 are stated with slight modification from [8].
Algorithm 4 Algorithm to construct CBIS
Let the given bi-connected graph beG = (V,E)
Sort the edges ofE in increasing order of costEs = φ
for each edge(u, v) taken in ascending orderdoif two node disjoint paths betweenu andv using only edges fromEs with interference less thant times of interference of(u, v) cannot be foundthen
Add (u, v) toEs
end ifend forG′ = (V,Es) is the output graph.
Lemma 5.1. CBIS preserves two node disjoint paths with interference spanner property betweeneach pair of vertices.
Proof. The proof can be stated from the constructive nature of the Algorithm 4. An edge(u, v) isremoved only when it is found that its endpointsu andv are connected by two node disjoint spanner
13

paths from the edge setEs. SinceEs is the final output and no edge has been removed once ithas been added toEs, nodeu andv remains connected by two node disjoint spanner paths at finaltopology.
Thus, CBIS preserves two node disjoint paths with interference spanner property between eachpair of nodes.
Lemma 5.2. Edge set of LBIS is a super set of edge set of CBIS.
Proof. Since costs of edges are strictly increasing, the mutual ordering of edge consideration is same.That is, lete1 ande2 be two edges. Ife1 is considered beforee2 by a nodeu while constructingLBIS thene1 must has been considered beforee2 by Algorithm 4 for constructing CBIS. Thus theset of edges that are considered for constructing LBIS before a specific edge(u, v) will be subset ofthe set of the edges considered for constructing CBIS before(u, v). So, if Algorithm 4 cannot findu andv to be bi-connected then any node running Algorithm 3 will also fail to find u andv to bebi-connected. Thus edge set of LBIS must be a super set of edgeset of CBIS.
By combining Lemma 5.1 and Lemma 5.2 we deduce:
Theorem 5.3. LBIS is a bi-connected interference spanner.
6 GENERALIZATION OF MIBCN PROBLEM
In this part, we focus on generalization of MIBCN problem. Suppose the initial network is (atleast)k connected. Here we provide a local algorithm to constructk + 1 minimum interferencepath preserving andk fault tolerant subnetworks. The algorithm is summarized inAlgorithm 5.It has similar three steps like Algorithm 2. It starts with each node executing neighbor discoveryprocedure. Then each nodeu tries to preservek + 1 node disjoint paths with each of the neighbors.The final output can be made bi-directional by using the bi-directional topology generation step. Thealgorithm preservesk + 1 node disjoint paths between each pair of nodes. Moreover, itpreservesk+ 1 minimum interference paths (not necessarily node/edge disjoint) between each pair of nodes.
Algorithm 5 Generalized Algorithm fork Fault Tolerant andk + 1 Minimum Interference PathPreserving Topology
Run Neighbor Discovery procedure and get neighborhood graphGu = (Vu, Eu)
Nf = φ
for each nodev ∈ V (Gu) doif there are at leastk + 1 node disjoint path betweenu andv with interference less than theinterference of the edge(u, v) thenNf = Nf ∪ v
end ifend forNl = V (Gu)−Nf is the neighborhood set ofu
Proof of the correctness of this algorithm requires two parts to be proved. For the first part weprove that the topology isk fault tolerant ork + 1 connected using the following corollary deducedfrom Lemma 4.5.
14

Corollary 6.1. Let G andG′ be two undirected graph such thatV (G) = V (G′). If G is k + 1
connected and every edge(u, v) ∈ E(G) − E(G′) satisfies thatu has at leastk + 1 node disjointpaths tov with less interference than(u, v) thenG′ is alsok + 1 connected.
For the second part, we prove that the topology isk + 1 minimum interference path preserving inthe following Lemma.
Lemma 6.2. Algorithm 5 preservesk + 1 minimum interference path.
Proof. We use proof by contradiction method. Let, there is a pair of nodesx andy whoseith,1 ≤ i ≤ (k+1), minimum interference path is not preserved. Let theith minimum interference pathin original graph betweenx andy beP i
xy =< x = v1, v2, . . . , vn = y >. If P ixy is not preserved in
the topology generated by Algorithm 5 then there must be at least one edge(vj , vj+1) which is notpreserved. Thus, when Algorithm 5 is executed at the nodevj , vj must have found at least(k + 1)
vj ∼ vj+1 paths which have less interference than the edge(vj , vj+1). So, we may replace the edge(vj , vj+1) by (k + 1) shorter path between them inP i
xy and get(k + 1) shorter path betweenx andy thanP i
xy. But that is not possible sinceP ixy is theith minimum path with0 ≤ i ≤ (k + 1). Thus,
every edge on every(k + 1) minimum interference path is preserved by Algorithm 5. Algorithm 5preserves(k + 1) minimum interference path.
7 SIMULATION RESULTS
7.1 Simulation Environment
To evaluate the performance of the proposed algorithms we simulate randomly deployed networksof 75 to 300 nodes uniformly distributed over a1000 m × 1000 m square region. The maximumtransmission range of each node is250 m. Thus the width and height of the deployment area arefour times of the maximum transmission range. Only bi-connected networks are considered sinceunless the initial network is bi-connected it is impossibleto generate a bi-connected sub network.By initial network, we mean the network that consists of all the nodes and there is a link between apair of nodes if they can transmit to each other using maximumtransmission power.
We have generated10 instances of networks for each node number and performance metrics aremeasured as an average of these10 random tries (unless otherwise stated explicitly).
7.2 Performance metrics
We analyze the performance of the different algorithms using the following evaluation metrics:Interference. We measure the level of interference of a network by countingthe total number of
links present in the underlying communication graph. We assume that a “(wireless) link” virtuallyexists fromu to v if v is within the transmission range ofu.
Fault tolerance.For each of the communication networks we measure the degreeof connectivityas a measure of level of fault tolerance. We call a networkn-connected if there exists at leastn pathsbetween any pair of nodes within the network. Needless to saythat increased degree of connectivitygenerally means increased level of fault tolerance.
Quality of paths. For a pair of nodesu andv, we determine two node disjoint least interferencepaths, i.e., the paths having the lowest and the second-lowest interference numbers. These two pathscan be easily determined by finding a cycle with minimum interference number that contains theverticesu andv. We record the interference number of this cycle and take theaverage over all the
15

node pairs. We named this average asAverage Path Interference (API). This metric captures thequality of any algorithm that simultaneously provides bi-connectivity and reduced interference.
Delay Performance.As transceivers of nodes in wireless ad hoc networks operatein half duplexmode, an intermediate relay node always stores the packet first and then forwards. Therefore, thetransmission delay between a communicating pair of nodes isroughly proportional to the hop dis-tance between them. For that reason we use hop counts for approximating delays in transmissions.We observe that a similar approach has been used in [20][25] to quantify delay performance. For apair of nodesu andv, we determine two node disjoint paths with total minimum interference. Werecord the hop count of these two paths and take the average over all the node pairs. This measure-ment is used to compare delay performance of the proposed algorithms. Note that lower number ofhops means a better delay performance.
7.3 Numerical ResultsInterference
Figure 4 shows the effect of the algorithms (CMIBCN, LMIBCN and LBIS) on a graph of150 nodes.Generated topologies are shown in Figure 4 to give a comparative view with initial topology on agraph of150 nodes. Each node is shown as a point and each line segment indicates a link. A link isshown between two nodes (e.g., in Figure 4(a)) if their distance is less than the maximum transmis-sion range (250 m in our experiments). Figure 4(b), Figure 4(c) and Figure 4(d) show CMIBCN,LMIBCN and LBIS output, respectively all generated by running the corresponding algorithms onthe network shown in Figure 4(a). CMIBCN, LMIBCN and LBIS have significantly less number oflinks compared to the initial network. Moreover, LBIS is themost sparse among all the networkswhich is obvious as LBIS is less restricted than minimum interference networks.
Figure 5 shows a comparison on number of links with respect toinitial networks. It is clearly evi-dent that the proposed algorithms achieved linear growth onnumber of edges contrasting exponentialgrowth of initial networks. LBIS is the most sparse among these topologies having least number oflinks. A subtle check of Figure 5 reveals that LMIBCN contains less number of links than CMIBCN.The reason for that is CMIBCN has one more property that is notpresent in LMIBCN. For each pairof nodes, CMIBCN preserves minimum interference path and another path which is node disjointwith this minimum interference path. On the other hand, LMIBCN preserves minimum interferencepath and is bi-connected. Thus there may exist two node disjoint paths between each pair of nodesin LMIBCN but neither of these may be the minimum interference path.
Fault tolerance
Figure 6 shows the connectivity achieved by our algorithms.For comparison purpose, we havealso plotted the result of I-MST [21]. X-axis shows the connectivity number (k) and Y-axis showspercentage of node pairs that arek connected. Clearly, LMIBCN and CMIBCN show high degreeof connectivity compared to recent results addressing interference like I-MST. Moreover a highpercentage of node pairs are at least3 connected in LMIBCN and CMIBCN. On the average only20% node pairs are biconnected in I-MST. Although LBIS ensuresbi-connectivity as the plot showsa 100% node pairs are bi-connected, but the percentage of nodes having connectivity more than2drops quickly compared to CMIBCN and LMIBCN.
Quality of paths
We have determined the API for various structures generatedby our algorithms. Table 1 shows theresults. Both CMIBCN and LMIBCN have same API because the same goal is achieved in both
16

0
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400 500 600 700 800 900 1000 0
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400 500 600 700 800 900 1000
(a) Initial Network (b) CMIBCN
0
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400 500 600 700 800 900 1000 0
100
200
300
400
500
600
700
800
900
1000
0 100 200 300 400 500 600 700 800 900 1000
(c) LMIBCN (d) LBIS (stretch factort = 2)
FIGURE 4Effect on moderate network (with 150 nodes)
17

0
1000
2000
3000
4000
5000
6000
7000
50 100 150 200 250 300
Num
ber
of E
dges
Node Number
Initial GraphCMIBCNLMIBCN
LBIS
FIGURE 5Comparison on number of links
Number CMIBCN LMIBCN LBIS Percentage increase in LBISof Nodes w.r.t. CMIBCN and LMIBCN
75 46.01 46.01 47.89 4.08%150 62.75 62.75 65.98 5.14%225 74.90 74.90 77.84 3.93%300 88.15 88.15 90.37 3.09%
TABLE 1API of different structures
topologies by preserving almost same number of links. This equality indicates that LMIBCN, al-though locally constructed, achieves similar results in terms of quality of paths to CMIBCN. LBIS,being a less restrictive topology, has slightly higher API compared to CMIBCN and LMIBCN. How-ever if we consider the percentage increase in API of LBIS with respect to CMIBCN and LMIBCNwe can see a very small increase relative to CMIBCN or LMIBCN (between3 ∼ 5%), thus makingit a very attractive interference-aware topology.
Delay performance
Figure 7 shows the average hop count of our algorithms. We compared the performance of ouralgorithms with two other algorithms:optimalmin-hop algorithm andmin-energyalgorithm. Bothof these two algorithms are run on the same initial networks.In optimal min-hop algorithm, for everypair of nodes(u, v), we determine two node disjoint paths with minimum total number of hops. Wetake average over all such node pairs. We call it “optimal” because this algorithm provides the leastnumber of hops achievable by any algorithm on a given network. On the other hand, in min-energy
18

0
20
40
60
80
100
1 2 3 4 >4
Per
cent
age
pair
of n
odes
k-c
onne
cted
Connectivity Number (k)
CMIBCNLMIBCN
LBISI-MST
FIGURE 6Comparison on Fault Tolerance
5
10
15
20
25
30
100 150 200 250 300
Ave
rage
hop
cou
nt
Node Number
OptimalMinimum Energy
MIBCNLBIS
FIGURE 7Comparison of hop counts
19

20
25
30
35
40
45
50
100 150 200 250 300
Ave
rage
ene
rgy
to tr
ansm
it on
e pa
cket
(nW
)
Node Number
Minimum EnergyMIBCN
LBIS
FIGURE 8Comparison on energy consumptions
Parameter Description Valueα Path loss factor 2
K Predetection threshold (golbal constant) 10−7
S Packet size 512 bytesB Channel bandwidth 2 Mbps
TABLE 2Parameters used for energy measurements
algorithm, we determine two node disjoint paths between a pair of nodes(u, v) with minimum totalenergy consumption. Then we measure the hop count of those two paths. We take average overall such pairs and call it average hop count for ”Minimum Energy“. Let us now return to Figure 7.The plot shows that delay performance of MIBCN, LBIS and min-energy increases linearly with theincrease in number of nodes, whereas remains more or less invariant for optimal algorithm. MIBCN(both centralized and local constructions) has better delay performance compared to min-energyalgorithm. The difference in delay performance of LBIS and min-energy is indistinguishable.
Energy consumptions
Energy consumption is another important factor in wirelessnetworks. So, it is important that our al-gorithms do not consume too much energy while focusing on interference. As reducing interferenceis the prime concern rather than reducing energy of this work, it is obvious that topologies generatedby our algorithm are likely to consume more energy than minimum energy topologies. However, thedifference is albeit small. Figure 8 shows the average energy consumption to transmit a single packetbetween a pair of nodes. The energy model that we have used is as follows. To send a message fromnodes to nodet at distanced, the minimum transmission power is approximated byPs→t = Kdα
20

whereα ∈ [2, 4] is the path loss factor, andK is a global constant. For a packet size ofS bits and thedata rate ofB bps, the transmission timeT = S
B. Therefore the energy consumed for transmitting a
packet over a link〈s, t〉 is:
γ(〈s, t〉) = Ps→t × T = Ps→t ×S
B
Since a path is defined by consecutive edges, the energy consumption for transmitting over a pathπ = 〈s0, s1, . . . , sn+1〉 becomesγ(π) =
∑n
i=0γ(〈si, si+1〉). The detailed parameters used for this
calculation is shown in Table 2.Let us return to Figure 8 which shows a comparison of our algorithms with optimal result (i.e. min-
imum energy topology) all run over the same initial topologies. The “Minimum Energy” in the plotis measured as follows. We determine two node disjoint pathsbetween any pair of nodes(u, v) withlowest energy consumptions among all paths. We have taken average over all possible pairs and plot-ted it as “Minimum Energy” in the figure. This is the achievableoptimalenergy consumption for anytopology control algorithm. For measuring energy consumptions of MIBCN (both centralized andlocal constructions) and LBIS, we take the same approach butinstead of two lowest energy paths wemeasured energy consumptions over two lowest minimum interference paths. The plots show thateven though our algorithm focuses on interference, there isa small increase in energy consumptions(less than10%) with respect to optimal over all node densities. As LBIS topologies are sparser thanMIBCN topologies, the energy consumptions of LBIS topologies are consequently higher.
8 CONCLUSIONS AND FUTURE WORKS
Minimizing interference and providing fault tolerance aretwo important goals to achieve in ad hocwireless networks. In this paper, we have provided numerousunified algorithms to simultaneouslyachieve both goals. CMIBCN is centrally constructed minimum interference path preserving bi-connected topology which can be used for benchmarking purposes. LMIBCN can be locally con-structed which has similar characteristics of CMIBCN. Structures like LBIS are also interesting andimportant since topologies with spanner properties have useful applications. The generalized solu-tion of MIBCN problem presented in Section 6 is intuitive anduseful. All the topologies includingLMIBCN and LBIS are found to provide important results with significantly less number of linksas shown by Section 7. The interference of the paths have alsobeen quantified using pairwise aver-age path interference (API). It has been found that LMIBCN and CMIBCN generates topology withsame API.
There still remain some open problems to answer. Minimizinginterference is NP-hard [4] how-ever it is still unknown whether finding bi-connected minimum interference path preserving sub-graphs with minimum number of edges is NP-hard or not. We alsodid not provide any bound ofthe stretch factor (t) for LBIS. It will be interesting to see how small stretch factor can be achievedby distributed algorithms. It has been shown that topology with minimum energy may have highinterference [5]. On the contrary, topology with minimum interference may show suboptimal en-ergy behavior. So, it is an interesting problem to find out theactual weight of these parameters intosome more desired phenomenon like network lifetime. We conjecture that this problem can be ad-dressed replacing the weight of an edge with some function depending on the energy consumptionand interference of the edge. LMIBCN is constructed depending on messages from the full set ofneighbors’ information. However, it will be interesting toprovide some incremental methods tominimize interference using similar techniques presentedin [13] for minimizing energy.
21

REFERENCES
[1] M. Bahramgiri, M. Hajiaghayi, and V. S. Mirrokni. (2006). Fault-tolerant and 3-dimensional distributed topologycontrol algorithms in wireless multi-hop networks.Wireless Networks, 12(2):179–188.
[2] B. Bolloas. (2001).Random Graphs. Cambridge University Press.
[3] P. Bose, P. Morin, I. Stojmenovic, and J. Urrutia. (2001). Routing with guaranteed delivery in ad hoc wireless networks.Wireless Networks, 7(6):609–616.
[4] K. Buchin. (2008). Minimizing the maximum interferenceis hard.CoRR, abs/0802.2134.
[5] M. Burkhart, P. von Rickenbach, R. Wattenhofer, and A. Zollinger. (2004). Does topology control reduce interference?In Proc. of MobiHoc.
[6] L. P. Chew. (1986). There is a planar graph almost as good as the complete graph. InProc. of the 2nd annual Symp.on Comp. geometry.
[7] Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, and Clifford Stein. (2001).Introduction to Algorithms.The MIT Press, 2 edition.
[8] A. Czumaj and H. Zhao. (2003). Fault-tolerant geometricspanners. InProc. of the 19th annual Symp. on Comp.geometry (SCG), pages 1–10.
[9] J. Gao, L. J. Guibas, J. Hershberger, L. Zhang, and A. Zhu.(2001). Geometric spanner for routing in mobile networks.In Proc. of MobiHoc.
[10] Md. E. Haque and A. Rahman. (2011). Fault tolerant interference-aware topology control for ad hoc wireless networks.In ADHOC-NOW, pages 100–116.
[11] A. Iyer, C. Rosenberg, and A. Karnik. (2006). What is theright model for wireless channel interference? InProceedingsof the 3rd international conference on Quality of service inheterogeneous wired/wireless networks, QShine ’06, NewYork, NY, USA. ACM.
[12] B. Karp and H. T. Kung. (2000). GPSR: greedy perimeter stateless routing for wireless networks. InProc. ofMobiCom, pages 243–254.
[13] L. Li and J. Y. Halpern. (2004). A minimum-energy path-preserving topology-control algorithm.IEEE Trans. onWireless Communications, 3(3):910–921.
[14] N. Li and J. C. Hou. (2006). Localized fault-tolerant topology control in wireless ad hoc networks.IEEE Trans.Parallel Dist. Syst., 17(4):307–320.
[15] X. Li, G. Calinescu, P. Wan, and Y. Wang. (2003). Localized delaunay triangulation with application in ad hoc wirelessnetworks. IEEE Trans. Parallel Distrib. Syst., 14(10):1035–1047.
[16] X. Li, K. Moaveninejad, W. Song, and W. Wang. (2005). Interference-aware topology control for wireless sensornetworks. InProc. SECON.
[17] X. Li and P. Wan. (2001). Constructing minimum energy mobile wireless networks. InProc. of ACM MobiHoc, pages55–67.
[18] X. Li, P. Wan, and Y. Wang. (2001). Power efficient and sparse spanner for wireless ad hoc networks. InProc. ofICCCN.
[19] X. Li, P. Wan, Y. Wang, and C. Yi. (2004). Fault tolerant deployment and topology control in wireless ad hoc networks.Wireless Communications and Mobile Computing, 4(1):109–125.
[20] T. Melodia, D. Pompili, V. C. Gungor, and I. F. Akyildiz.(2005). A distributed coordination framework for wirelesssensor and actor networks. InProc. of MobiHoc, pages 99–110.
[21] K. Moaveninejad and X. Li. (2005). Low-interference topology control for wireless ad hoc networks.AHSN, 1(1-2).
[22] M. D. Penrose. (1999). On k-connectivity for a geometric random graph.Random Struct. Algorithms, 15(2):145–164.
[23] V. Rodoplu and T. H. Meng. (1999). Minimum energy mobilewireless networks. IEEE J. Selected areas ofcommunication, 17(8):1333–1344.
[24] R. Wattenhofer, E. L. Li, P. Bahl, and Y. Wang. (2001). Distributed topology control for wireless multihop ad-hocnetworks. InINFOCOM.
[25] C. Xu, X. Li, A. Nayak, and I. Stojmenovic. (2011). Localized delay-bounded and energy-efficient data aggregation inlow-traffic request-driven wireless sensor and actor networks. In IWCMC, pages 7–12.
[26] H. Xu, L. Huang, W. Liu, B. Xu, and M. Xiao. (2008). Topology control for minimal path interference in wirelesssensor networks. InProc. of the IEEE Symposium on Computers and Communications(ISCC).
[27] A. C. Yao. (1982). On constructing minimum spanning trees in k-dimensional spaces and related problems.SIAM J.Comput., 11(4):721–736.
22