-
REVIEWThis section of Journal of Materials Research is reserved
for papers that are reviews of literature in a given area.
Measurement of hardness and elastic modulus byinstrumented
indentation: Advances in understanding andrefinements to
methodologyW.C. OliverMTS Systems Corporation, Oak Ridge,
Tennessee, 37830G.M. Pharra)The University of Tennessee and Oak
Ridge National Laboratory, Department of Materials Scienceand
Engineering, Knoxville, Tennessee 37996
(Received 15 June 2003; accepted 23 September 2003)
The method we introduced in 1992 for measuring hardness and
elastic modulus byinstrumented indentation techniques has widely
been adopted and used in thecharacterization of small-scale
mechanical behavior. Since its original development, themethod has
undergone numerous refinements and changes brought about
byimprovements to testing equipment and techniques as well as from
advances in ourunderstanding of the mechanics of elasticplastic
contact. Here, we review our currentunderstanding of the mechanics
governing elasticplastic indentation as they pertain toload and
depth-sensing indentation testing of monolithic materials and
provide anupdate of how we now implement the method to make the
most accurate mechanicalproperty measurements. The limitations of
the method are also discussed.
I. INTRODUCTIONThe method we introduced in 1992 for
measuring
hardness and elastic modulus by instrumented indenta-tion
techniques has widely been adopted and used in thecharacterization
of mechanical behavior of materials atsmall scales.1,2 Its
attractiveness stems largely from thefact that mechanical
properties can be determined di-rectly from indentation load and
displacement measure-ments without the need to image the hardness
impres-sion. With high-resolution testing equipment, this
facili-tates the measurement of properties at the micrometerand
nanometer scales.35 For this reason, the method hasbecome a primary
technique for determining the me-chanical properties of thin films
and small structural fea-tures.623 Films with characteristic
dimensions of the or-der 1 m are now routinely measured, and with
goodtechnique, the method can be used to characterize, atleast in a
comparative sense, the properties of films asthin as a few
nanometers.
During the past decade, we have made several impor-tant changes
to the method that both improve its accuracyand extend its realm of
application. These changes havebeen developed both through
experience in testing alarge number of materials and by
improvements to test-ing equipment and techniques. For example, the
meas-urement of contact stiffness by dynamic techniques al-lows for
continuous measurement of properties as a func-tion of depth and
also facilitates more accurateidentification of the point of first
surface contact.24 Wehave also developed improved methods for
calibratingindenter area functions and load frame compliances.Thus,
the primary purpose of this article is to provide thereader with an
update on how we implement the methodin practice now and the
improvements we have made toit during the past 10 years.
We have also developed a much better understandingof the contact
mechanics on which the method is based,mostly through finite
element simulation.2536 Thus, asecond objective of the article is
to review what we nowknow about the mechanics of elasticplastic
contact andhow this impacts the measurement methods. For in-stance,
we now have a much better grasp of the physicalorigin of some of
the empirical constants needed in themethod,35 and we also have a
much better understandingof the limitations of the method,
particularly in materialsthat pile-up.25,34,37
a)This author was an editor of this focus issue during the
reviewand decision stage. For the JMR policy on review and
publicationof manuscripts authored by editors, please refer to
http://www.mrs.org/publications/jmr/policy.html
J. Mater. Res., Vol. 19, No. 1, Jan 2004 2004 Materials Research
Society 3
-
To keep the article to a reasonable length, we haveintentionally
limited its focus to the behavior of mono-lithic materials that can
be described as a semi-infinite,elasticplastic half spaces. There
are, of course, impor-tant issues that must be addressed when
applying themethod to thin films to account for the influences of
thesubstrate. In fact, much of the recent literature on loadand
depth-sensing indentation testing deals with this sub-ject, and
there are numerous important unresolved issuesremaining to be
explored.1123 We also limit the dis-cussion to materials in which
there are no time-dependent deformation mechanisms such as creep or
vis-coelasticity. Here, too, there are important issues
underinvestigation.3842
To set the stage, we begin with a brief review of themethod as
it was originally developed. This is then fol-lowed by a discussion
of advances in our understandingof the contact problem and then
details of the method aswe now use and apply it.
II. THE METHODA. Basic principles
The method was developed to measure the hardnessand elastic
modulus of a material from indentation loaddisplacement data
obtained during one cycle of loadingand unloading. Although it was
originally intended forapplication with sharp, geometrically
self-similar indent-ers like the Berkovich triangular pyramid, we
have sincerealized that it is much more general than this and
applies
to a variety of axisymmetric indenter geometries includ-ing the
sphere. A discussion of why the method works forspherical
indentation is given at the end of this section.
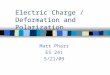
A schematic representation of a typical data set ob-tained with
a Berkovich indenter is presented in Fig. 1,where the parameter P
designates the load and h thedisplacement relative to the initial
undeformed surface.For modeling purposes, deformation during
loading isassumed to be both elastic and plastic in nature as
thepermanent hardness impression forms. During unload-ing, it is
assumed that only the elastic displacements arerecovered; it is the
elastic nature of the unloading curvethat facilitates the analysis.
For this reason, the methoddoes not apply to materials in which
plasticity reversesduring unloading. However, finite element
simulationshave shown that reverse plastic deformation is
usuallynegligible.35
There are three important quantities that must bemeasured from
the Ph curves: the maximum load, Pmax,the maximum displacement,
hmax, and the elastic unload-ing stiffness, S dP/dh, defined as the
slope of theupper portion of the unloading curve during the
initialstages of unloading (also called the contact stiffness).The
accuracy of hardness and modulus measurement de-pends inherently on
how well these parameters can bemeasured experimentally. Another
important quantity isthe final depth, hf, the permanent depth of
penetrationafter the indenter is fully unloaded.
The analysis used to determine the hardness, H, andelastic
modulus, E, is essentially an extension of themethod proposed by
Doerner and Nix43 that accounts forthe fact that unloading curves
are distinctly curved in amanner that cannot be accounted for by
the flat punchapproximation. In the flat punch approximation used
byDoerner and Nix, the contact area remains constant as theindenter
is withdrawn, and the resulting unloading curveis linear. In
contrast, experiments have shown that un-loading curves are
distinctly curved and usually well ap-proximated by the power law
relation:
P = h hfm , (1)where and m are power law fitting constants.1
Table Isummarizes the values of the constants observed in our
TABLE I. Values of parameters characterizing unloading curves
asobserved in nanoindentation experiments with a Berkovich
indenter.a
Material
(mN/nmm) mCorrelation
coefficient, R
Aluminum 0.265 1.38 0.999938Soda-lime glass 0.0279 1.37
0.999997Sapphire 0.0435 1.47 0.999998Fused silica 0.0500 1.25
0.999997Tungsten 0.141 1.51 0.999986Silica 0.0215 1.43 0.999985
aData from Ref. 1.FIG. 1. Schematic illustration of indentation
loaddisplacement datashowing important measured parameters (after
Ref. 1).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 20044
-
original experiments.1 The variation of the power lawexponents
in the range 1.2 m 1.6 demonstrates notonly that the flat punch
approximation is inadequate(m 1 for the flat punch), but also that
the indenterappears to behave more like a paraboloid of
revolution,for which m 1.5.44 This result was somewhat surpris-ing
because the axisymmetric equivalent of the Berko-vich indenter is a
cone, for which m 2. This discrep-ancy has since been explained by
the concept of aneffective indenter shape, which will be discussed
inSec. III. A.35,36
The exact procedure used to measure H and E is basedon the
unloading processes shown schematically inFig. 2, in which it is
assumed that the behavior of theBerkovich indenter can be modeled
by a conical indenterwith a half-included angle, , that gives the
same depth-to-area relationship, 70.3. The basic assumption isthat
the contact periphery sinks in in a manner that can bedescribed by
models for indentation of a flat elastic half-space by rigid
punches of simple geometry.4448 Thisassumption limits the
applicability of the method becauseit does not account for the
pile-up of material at thecontact periphery that occurs in some
elasticplastic ma-terials. Assuming, however, that pile-up is
negligible, theelastic models show that the amount of sink-in, hs,
isgiven by:
hs = Pmax
S , (2)
where is a constant that depends on the geometry of theindenter.
Important values are: 0.72 for a conicalpunch, 0.75 for a
paraboloid of revolution (whichapproximates to a sphere at small
depths), and 1.00for a flat punch.44 Based on the empirical
observationthat the unloading curves are best approximated by
anindenter that behaves like a paraboloid of revolution(m 1.5), the
value 0.75 was recommended andhas since become the standard value
used for analysis.Recent analytical work has provided a more
completepicture of why takes on this value.35,49 This is
alsoaddressed in Sec. III. A.
Using Eq. (2) to approximate the vertical displacementof the
contact periphery, it follows from the geometry of
Fig. 2 that the depth along which contact is made be-tween the
indenter and the specimen, hc hmax hs, is:
hc = hmax Pmax
S . (3)
Letting F(d) be an area function that describes theprojected (or
cross sectional) area of the indenter at adistance d back from its
tip, the contact area A is then
A = Fhc . (4)The area function, also sometimes called the
indenter
shape function, must carefully be calibrated by indepen-dent
measurements so that deviations from nonideal in-denter geometry
are taken into account. These deviationscan be quite severe near
the tip of the Berkovich indenter,where some rounding inevitably
occurs during the grind-ing process. Although a basic procedure for
determiningthe area function was presented as part of the
originalmethod, we have made significant changes to it in
recentyears. A complete description of the process we now usein its
place is presented in Sec. IV.
Once the contact area is determined, the hardness isestimated
from:
H =Pmax
A . (5)
Note that because this definition of hardness is based onthe
contact area under load, it may deviate from the tra-ditional
hardness measured from the area of the residualhardness impression
if there is significant elastic recov-ery during unloading.
However, this is generally impor-tant only in materials with
extremely small values ofE/H.25
Measurement of the elastic modulus follows from itsrelationship
to contact area and the measured unloadingstiffness through the
relation
S = 2
Eeff A , (6)
where Eeff is the effective elastic modulus defined by
1Eeff
=
1 2
E +1 i
2
Ei. (7)
The effective elastic modulus takes into account the factthat
elastic displacements occur in both the specimen,with Youngs
modulus E and Poissons ratio , and theindenter, with elastic
constants Ei and i. Note thatEq. (6) is a very general relation
that applies to anyaxisymmetric indenter.2,50 It is not limited to
a specificsimple geometry, even though it is often associated
withflat punch indentation. Although originally derived forelastic
contact only,2 it has subsequently been shown toapply equally well
to elasticplastic contact50 and that
FIG. 2. Schematic illustration of the unloading process showing
pa-rameters characterizing the contact geometry (after Ref. 1).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 5
-
small perturbations from pure axisymmetry geometry donot effect
it either.51 It is also unaffected by pile-up andsink-in.
In the original method for measuring hardness andmodulus, the
dimensionless parameter was taken asunity. Traditionally, has been
used to account for de-viations in stiffness caused by the lack of
axial symmetryfor pyramidal indenters. However, it has been shown
thateven for indentation of an elastic half-space by axisym-metric
rigid cone, can deviate significantly fromunity.26 In this work, we
therefore choose to redefine to account for any and all physical
processes that mayaffect the constant in Eq. (6). In Sec. III. E,
other valuesfor that may be important in precise measurements
willbe considered along with the physical nature of
theirorigins.
B. Application to spherical indentationAlthough we have
discussed the method primarily as it
pertains to indentation with a sharp Berkovich or
conicalindenter, it is not generally recognized that the
methodapplies equally well to a sphere and can be used
withoutmodification to determine the hardness and modulusfrom
spherical indentation. To demonstrate this, it is use-ful to
consider the contact depth for spherical indentationdetermined by
means of Eq. (3) when applied to Hertzianelastic contact by a
spherical indenter of radius R1pressed into a spherical hole of
radius R2 that representsthe hardness impression. Note that
Hertzian contactanalysis is restricted to the condition that the
depth ofpenetration is small relative to the radius of the
sphere.Letting R (1/R1 +1/R2)1, the loaddisplacement re-lation
is52,53
P = 43REeffh hf32 . (8)The depth that appears in this relation
is h hf rather thanh because the displacements are for the elastic
unloadingcurve only (Fig. 1). The stiffness during unloading isthen
found by differentiating this expression with respectto h, or
S =dPdh = 2REeffh hf
12. (9)
Letting h hmax to evaluate the expressions at themaximum depth
and noting that for a sphere is 0.75,substituting Eqs. (8) and (9)
into Eq. (3) yields
hc =hmax + hf
2 , (10)
or the contact depth determined from the method is sim-ply the
average of the final and maximum depths. This isprecisely the value
recommended by Field and Swain intheir method for analyzing load
and depth-sensing dataobtained with spherical indenters.54,55 The
contact areaand hardness determined by the two methods will thus
be
the same as will be the elastic modulus because Eq. (6)applies
to any indenter geometry. Note that hardnessesmeasured with a
spherical indenter are not necessarily thesame as those for the
Berkovich.
III. ADVANCES IN UNDERSTANDINGAlthough the method has
extensively been used and
verified for numerous materials, certain aspects of it
havealways been of concern to us, either because the
physicalprocesses were not completely understood or becausesome of
the constants needed to apply it were empiricallyderived. In
particular, we have always been interested inunderstanding: (i) why
unloading curves are well de-scribed by the power law relation of
Eq. (1); (ii) why thepower law exponent in Eq. (1) falls roughly in
the range1.2 m 1.6 rather than taking on the value m 2 aswould be
expected for a conical indenter; and (iii) whythe best value for
the geometric parameter is about0.75. Moreover, from a more
fundamental standpoint, itwas not entirely clear to us how the
elastic contact solu-tions used to derive Eqs. (3) and (6) could be
used tomodel accurately the elastic unloading process as theyapply
to the indentation of a flat elastic half-space,whereas the real
problem involves a half space whosesurface has severely been
distorted by the formation of ahardness impression. These questions
have been an-swered through the concept of an effective
indentershape.35,36
A. The effective indenter shapeThe ideas underlying the
effective indenter shape are
outlined in Fig. 3. The basic principles are derived
fromobservations gleaned from finite element simulations
ofindentation of elasticplastic materials by a rigid
conicalindenter with a half included angle of 70.3.35 During
theinitial loading of the indenter [Fig. 3(a)], both elastic
andplastic deformation processes occur, and the indenterconforms
perfectly to the shape of the hardness impres-
FIG. 3. Concepts used to understand and define the effective
indentershape (from Ref. 35).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 20046
-
sion. However, during unloading [Fig. 3(b)], elastic re-covery
causes the hardness impression to change itsshape. A key
observation is that the unloaded shape is notperfectly conical, but
exhibits a subtle convex curvaturethat has been exaggerated in Fig.
3(b) for the purposes ofillustration. The importance of the
curvature is that as theindenter is elastically reloaded [Fig.
3(c)], the contactarea increases gradually and continuously until
full loadis again achieved, a process which must be the reverse
ofwhat happens during unloading because both processesare elastic.
It is this continuous change in contact areathat produces the
nonlinear unloading curves. Further-more, the relevant elastic
contact problem is not that ofconical indenter on a flat surface,
but a conical indenterpressed into a surface that has been
distorted by the for-mation of the hardness impression.
Experimental evidence for the curvature in the un-loaded
hardness impressions is given in Fig. 4, wheretopographical images
of a Berkovich indentation in fusedsilica are presented. The images
were obtained by scan-ning the specimen laterally under the
indenter tip with avery light load applied to the indenter to keep
it in con-tact. The three-dimensional (3D) image in Fig. 4(a)
clearly shows the curvature of the indentation faces asdoes the
cross section in Fig. 4(b).
The mathematical form of the unloading curve can beunderstood by
introducing an effective indenter shape.As shown in the lower
portion of Fig. 3, the shape of theeffective indenter is that which
produces the same nor-mal surface displacements on a flat surface
that would beproduced by the conical indenter on the unloaded,
de-formed surface of the hardness impression. As such, theshape is
described by a function z u(r), where u(r) isthe distance between
the conical indenter and the un-loaded deformed surface and r is
the radial distance fromthe center of contact. Thus, provided the
shape of thedeformed surface is known, the function u(r) can
befound and the effective indenter can be constructed. Fi-nite
element simulations have verified that constructingthe effective
indenter in this way provides an accuraterepresentation of the
unloading data.35,36 Although theexact shape of the effective
indenter depends in compli-cated ways on the elastic and plastic
deformation char-acteristics of the material, it always has a
smooth,rounded profile at its tip. The reason for this is that
theslope of the unloaded hardness impression at its centerexactly
matches the slope of the conical indenter (i.e., thetwo surfaces
conform perfectly at the tip of the indenter).Thus, the plastic
deformation producing the hardness im-pression has the interesting
effect of removing the elasticsingularity at the tip of the
indenter. Finite element stud-ies have also shown that the
effective indenter shape iswell approximated by the power-law
relation
z = Brn , (11)where B is a fitting constant and the exponent n
varies inthe range 26 depending on the material properties.35The
lower end of this range corresponds to an indenterwith the shape of
a paraboloid of revolution, thus ex-plaining why indentation with a
rigid cone is more likethat of a paraboloid of revolution or a
sphere.
One can also use the effective shape concept to un-derstand why
unloading curves are well described by thepower-law relation of Eq.
(1) with power-law exponentsm in the range 1.21.6. Sneddon44 has
shown that forindentation of an elastic half-space by an
axisymmetricrigid indenter described by the power-law relation
ofEq. (11), the loaddisplacement relation is
P =2Eeff
B1n n
n + 1n2 + 12n2 + 1 1nh1+1n ,(12)
where is the factorial or gamma function. Compari-son with Eq.
(1) shows that
m = 1 + 1n . (13)Thus, given that n values range from 26, one
would
expect ms in the range 1.21.5, in accordance with
theexperimental observations in Table I.
FIG. 4. Topographic image of a Berkovich indentation in fused
silicaobtained using a quantitative imaging system that uses the
indenteritself as the imaging tip: (a) complete 3D image showing
the curvatureof the faces; (b) cross section through an edge and
the opposing facewith straight lines included to accentuate the
curvature.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 7
-
From a more fundamental standpoint, the shape of theeffective
indenter can be estimated by making simpleassumptions about the
distribution of pressure under theindenter. As schematically
illustrated in the lower portionof Fig. 3, the pressure that
develops during initial loadingis determined by complex elastic and
plastic deformationprocesses that are generally not amenable to
closed-formanalysis. However, during unloading, the pressure
de-creases by elastic processes only, and the shape of thehardness
impression changes to produce the curved sur-face. Upon reloading,
this pressure distribution must berecovered by elastic processes
only. Thus, the pressuredistribution at peak load serves to link
the elasticplasticprocesses during initial loading to the elastic
processesduring unloading and reloading. In this context, the
shapeof the effective indenter must be that which produces thissame
pressure distribution by elastic deformation of flatelastic
half-space.
To implement these ideas, one must have some knowl-edge of what
the actual pressure distribution is. Finiteelement simulations of
conical indentation of elasticplastic materials have shown that to
a first approxima-tion, the pressure is roughly uniform.35 This
occurs be-cause plasticity tends to diminish the effects of the
elasticsingularity at the tip of the cone and more evenly
dis-tribute the pressure. Assuming, then, a perfectly flat
pres-sure distribution, elastic contact theory gives the effec-tive
indenter shape as
zr =4pamaxEeff
2 Eramax , (14)where p is the pressure, amax is the radius of
the contactcircle at peak load, and E(r/amax) is the complete
ellipticintegral of the second kind evaluated at
r/amax.35,53Curve-fitting procedures show that this shape is
verywell approximated by the power-law relation:35
zr = 0.5484pamaxEeff
ramax2.61
. (15)
Note that this equation is exactly of the form ofEq. (11) with n
2.61, for which the correspondingvalue of m according to Eq. (13)
is m 1.38. Thus, tothe extent that the pressure distribution is
constant, thereis a simple explanation for why the effective
indenterbehaves more like a paraboloid of revolution (with n 2.61)
than a cone and why unloading curves obtainedwith conical indenters
can be described by power-lawrelations like Eq. (1) with m
1.38.
The effective shape concept can also be used to de-velop an
equation that describes the entire unloadingcurve in terms of
fundamental material properties. Com-bining Eqs. (11), (12), and
(15) and noting that the pres-sure p is equivalent to the hardness,
H, the unloadingcurve is given by
PPmax
= 0.858 EeffPmaxHh hf1.38
, (16)
which compares relatively well to experimental data.35Note that
although the concepts discussed here were de-veloped specifically
for conical indentation, they prob-ably apply to other indenter
geometries as well, as plas-ticity has the effect of flattening the
pressure distribution.Thus, one might expect unloading curves for
sphericaland other indenters to be well approximated by this
sameequation.
Lastly, the effective indenter shape concept is alsovaluable in
the way it provides a physically justifiableprocedure for
determining the value of the geometricparameter needed for accurate
measurement of H andE.35,49 Using Sneddons method for determining
the sur-face displacement at the contact perimeter for
indentationwith a rigid punch with profile given by Eq. (11)
inconjunction with Eq. (2) yields35:
= m1 2m
2m 1 12m 1
m 1 . (17)This relation is plotted in Fig. 5. Note that over
the
range of expected ms (m 1.2 to 1.6), varies onlymildly between
0.74 and 0.79 with an average value of0.76. Thus, the value
typically used in experiment, 0.75, is a reasonable estimate,
although one could easilyrationalize slightly different values.
Alternatively, a bet-ter, more self-consistent approach would be to
measureexperimentally the exponent m from the unloading curveand
then use Eq. (17) to determine the relevant valueof . This could
easily be implemented in experiment.
FIG. 5. The relation between and m given by Eq. (17) (from Ref.
35).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 20048
-
B. Errors due to pile-up for conical andBerkovich indenters
As noted in our discussion of Eq. (2), one significantproblem
with the method is that it does not account forpile-up of material
around the contact impression, as isobserved in many elasticplastic
materials. When pile-upoccurs, the contact area is greater than
that predicted bythe method, and both the hardness estimated from
Eq. (5)and the modulus from Eq. (6) are overestimated, some-times
by as much as 50%.25 This inability to deal withpile-up is a direct
consequence of using an elastic contactanalysis to determine the
contact depth. Because materi-als deformed elastically always
sink-in, pile-up cannotproperly be modeled.
The types of materials and conditions for which pile-up is most
likely to occur have been examined by finiteelement simulation.25
The fundamental material proper-ties affecting pile-up are the
ratio of the effective modu-lus to the yield stress, Eeff/y, and
the work-hardeningbehavior. In general, pile-up is greatest in
materials withlarge Eeff/y and little or no capacity for work
hardening(i.e., soft metals that have been cold-worked prior
toindentation). The ability to work harden inhibits pile-upbecause
as material at the surface adjacent to the indenterhardens during
deformation, it constrains the upwardflow of material to the
surface.
Results of finite element studies that illustrate the in-fluence
of material parameters on pile-up and sink-in arepresented in Fig.
6,25 which shows contact profiles underload for indentation by a
70.3 rigid cone. The materialsexamined all had a Youngs modulus E
70 GPa andPoissons ratio 0.25, but the yield stresses
weresystematically varied between y 0.114 GPa and
y 26.62 GPa to examine different plastic behaviors.Two separate
cases of work hardening were considered:one with no work hardening,
that is, a work-hardeningrate d/d 0, (an elasticperfectly plastic
mate-rial) and the other with a linear work-hardening rate 10y.
These yield strengths and work-hardening ratescover a wide range of
metals and ceramics.
In the course of the study, it was found that there is
aconvenient, experimentally measurable parameter thatcan be used to
identify the expected indentation behaviorof a given material.25
The parameter is the ratio of finalindentation depth, hf, to the
depth of the indentation atpeak load, hmax. The ratio hf/hmax can
be extracted easilyfrom the unloading curve in a nanoindentation
experi-ment. Furthermore, because conical and Berkovich in-denters
have self-similar geometries, hf/hmax does notdepend on the depth
of indentation. The natural limits forthe parameter are 0 hf/hmax
1. The lower limitcorresponds to fully elastic deformation and the
upperlimit to rigidplastic behavior. A similar approach basedon the
ratio of the slopes of the loading and unloading
curves, a quantity that can be measured continuouslyduring
loading by dynamic stiffness measurement, hasalso been
developed.56
The results in Fig. 6 show that the amount of pile-up orsink-in
depends on hf/hmax and the work-hardening be-havior. Specifically,
pile-up is large only when hf/hmax isclose to 1 and the degree of
work hardening is small. Itshould also be noted that when hf/hmax
< 0.7, very littlepile-up is observed no matter what the
work-hardeningbehavior of the material.
These observations are particularly important whenconsidered in
relation to the contact areas shown inFig. 7. This figure includes
two separate measures of thecontact area: one obtained by direct
examination of thecontact profiles in the finite element mesh,
Atrue, and theother by applying Eqs. (3) and (4) to the simulated
in-dentation loaddisplacement data to obtain the area de-duced from
the data analysis method, Aexpt. To general-ize, each area has been
normalized with respect to Aaf,the area given by the indenter area
function evaluated atthe maximum indentation depth, hmax. Since Aaf
is thearea that would occur in the absence of pile-up or
FIG. 6. Finite element simulation of contact profiles under load
forconical indentation of (a) non-work-hardening materials and (b)
linearwork-hardening materials with work-hardening rate 10 y
(afterRef. 25).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 9
-
sink-in, values of A/Aaf greater than 1 indicate pile-up,whereas
values less than 1 indicate sink-in. From thisfigure it is seen
that the data analysis method, because itis based on an elastic
analysis, significantly underesti-mates the true contact area for
materials in which pile-upis important. Furthermore, when hf/hmax
> 0.7, the accu-racy of the method depends on the amount of work
hard-ening in the material. If the material is
elasticperfectlyplastic, the method underestimates the contact area
by asmuch as 50%. On the other hand, contact areas for ma-terials
that work harden are predicted very well by themethod.
Note that from an experimental point of view, it is notpossible
to predict if a material work hardens basedsolely on the
loaddisplacement data. Therefore, in anindentation experiment, care
must be exercised whenhf/hmax > 0.7, as use of the method can
lead to largeerrors in the contact area. On the other hand, when
thepile-up is small (i.e., hf/hmax < 0.7), the contact
areasgiven by the method match very well with the true con-tact
areas obtained from the finite element analyses, in-dependent of
the work-hardening characteristics. Be-cause the hardness of the
material is given by H P/A,errors in the contact area will lead to
similar errors in thehardness, and according to Eq. (6), the
modulus will be inerror by a factor that scales as A.
As a practical matter, if there is suspicion that pile-upmay be
important based on the value of hf/hmax and/orother independent
knowledge of the properties of thematerial, indentations should be
imaged to examine theextent of the pile-up and establish the true
area of con-tact. For Berkovich indenters, indentations with a
largeamount of pile-up can be identified by the distinctbowing out
at the edges of the contact impression.57 Ifpile-up is large,
accurate measurements of H and E can-not be obtained using the
contact area deduced from the
loaddisplacement data; rather, the area measured fromthe image
should be used to compute H and E fromEqs. (5) and (6).
C. Correcting for pile-upDeveloping a method that can be used to
correct for
pile-up in a manner that does not involve imaging thecontact
impression has been one of the holy grails ofinstrumented
indentation research. The basic problem inachieving this goal is
that the amount of pile-up andsink-in depends on the work-hardening
characteristics ofthe material, so without some independent
knowledge ofthe work-hardening behavior, one does not know
whatcorrection to apply.
A good example of work in this area is that of Chengand
Cheng,2931 who used finite element simulations of awide variety of
elasticplastic materials with differentwork-hardening behaviors to
examine pile-up during in-dentation with a 68 cone (68 is the
centerline-to-faceangle for a Vickers indenter; although a 70.3
cone ismore representative of Berkovich indentation, the
basicresults of this work are still relevant). The method
theyproposed to account for pile-up is based on the work
ofindentation,31 which can be measured from the areas un-der
indentation loading and unloading curves. LettingWtot be the total
work of indentation (the area under theloading curve) and Wu the
work recovered during un-loading (the area under the unloading
curve), they foundthat the ratio of the irreversible work to the
total work,(Wtot Wu)/Wtot, appears to be a unique function ofEeff/,
independent of the work-hardening behavior.31Although their results
are presented only in graphicalform, the relation can be
approximated as:
Wtot WuWtot
1 5H
Eeff. (18)
Combining Eqs. (5) and (6) and taking 1 leads toanother equation
involving H and Eeff:
4
PmaxS2
=
H
Eeff2 . (19)
Because Wtot, Wu, Pmax, and S are all measurable
fromloaddisplacement data, Eqs. (18) and (19) represent
twoindependent relations that can be solved for H and Eeff ina
manner that does not directly involve the contact area.However, the
contact area could be computed from thederived value of H by means
of Eq. (5). Presumably, thisarea would be the true area including
the effects ofpile-up.
To the best of our knowledge, this method has neverbeen tested
experimentally. One potential problem is thatalthough pile-up is
large and potentially an issue onlywhen Eeff/H and Eeff/y are
relatively large (Fig. 6) (i.e.,
FIG. 7. Dependence of normalized contact areas on the
experimentalparameter hf/hmax. The areas are normalized with
respect to Aaf, thearea given by the area function of the indenter
assuming no pile-up orsink-in (after Ref. 25).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200410
-
in soft metals), close inspection of the data used to deriveEq.
(18) shows that (Wtot Wu)/Wtot may not be entirelyindependent of
the work-hardening behavior in this re-gime. If this is the case,
then the method suffers fromexactly the same problem as others,
that is, one musthave an independent knowledge of the
work-hardeningbehavior to apply the corrections. Further
experimentalexamination of this issue is warranted.
D. Pile-up for spherical indentersWe would also like to comment
briefly on the issue of
pile-up during spherical indentation, as the method canbe
applied to this important indenter geometry as well.Spherical
indentation differs from conical or pyramidalindentation in that
there is no elastic singularity at the tipof the indenter to
produce large stresses. As a conse-quence, deformation at small
loads and displacements isentirely elastic and then transitions to
plastic as the in-denter is driven further into the material. This
feature ofspherical indentation is what allows stressstrain
curvesto be approximated from indentation data using theclassical
approach of Tabor.58 Field and Swain54,55 haveapplied Tabors
approach to instrumented indentationand have developed a method
that uses the indenta-tion loaddisplacement data to approximate the
stressstrain curve and the work-hardening exponent. The ap-proach
requires that the deformation be fully plastic;that is, beyond the
transition from elastically dominatedto plastic-dominated
deformation. Also, it is assumedthat in the fully plastic regime,
the pile-up geometry isuniquely related to material deformation
parameters.
A point we would like to make is that the pile-upgeometry can
change considerably during the course ofspherical indentation and
it is therefore not possible topredict the pile-up based on the
mechanical properties ofthe material alone, even when fully plastic
deformationis achieved. The results of a recent finite element
studyhelp to elucidate how the pile-up changes with the depthof
penetration.34 Figure 8 shows the pile-up profiles foran
elasticperfectly plastic material with E/y 200,which is fairly
typical for a metal. To present the profileson a single set of
axes, the z coordinates have been nor-malized with respect to the
depth, h, the r coordinateswith respect to the contact radius, a,
and the depth ofpenetration h with respect to the radius of the
indenter, R.The pile-up and sink-in behavior are conveniently
char-acterized by the parameter s/h, where s is the height ofthe
contact periphery relative to the undeformed surface(s/h < 0 for
sink-in and s/h > 0 for pile-up).
At small depths, the material deforms only elastically,with the
indentation profile corresponding to that ofHertzian contact with
sink-in at the contact peripherysuch that s/h 0.5. First yielding
occurs at h/R 1.4 104 and a mean pressure pm 1.1y in a region on
theaxis of symmetry below the surface at z 0.5a, also in
accordance with Hertzian contact theory.52,53 As the loadon the
indenter is increased, the plastic zone grows andspreads upward,
and the sink-in diminishes. At h/R ofabout 0.08, material begins to
pile-up, and with furtherpenetration, the pile-up grows larger. It
should be noted,however, that an upper limiting value for s/h was
notreached in the simulations, even at the maximum depthof
penetration, h/R 0.34, corresponding to a/R 0.75.This is
significant because it shows that the pile-up ge-ometry can
continue to change even up to contact radii inexcess of 0.75R, a
value near the upper end of mostindentation experiments. Thus,
unlike the constraint fac-tor, pm /y, which plateaus at an upper
value of approxi-mately 3 at the onset of the fully plastic
deformationregime,33,34 pile-up can continue to grow well after
fullplasticity is achieved. Therefore, it does not follow thatjust
because the constraint factor has become constantthat the pile-up
geometry can also be assumed to beconstant. This ever-changing
nature of the pile-up geom-etry should carefully be considered when
interpretingresults from spherical indentation experiments in
mate-rials with a tendency to pile-up.
E. The correction factor The correction factor appearing in Eq.
(6) plays a
very important role when accurate property measure-ments are
desired. This constant affects not only the elas-tic modulus
calculated from the contact stiffness bymeans of Eq. (6), but the
hardness as well because pro-cedures for determining the indenter
area function are
FIG. 8. Finite element simulation of normalized contact profiles
underload for spherical indentation of an elasticperfectly-plastic
materialwith E/y 200 showing the influence of the normalized
penetrationdepth, h/R, on the pile-up/sink-in behavior (after Ref.
34).
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 11
-
also based on Eq. (6), and area functions can be in errorif the
wrong value of is used (area function calibrationmethods are
addressed in Sec. IV). Thus, without a goodworking knowledge of ,
one is limited in the accuracythat can be achieved in the
measurement of both H and E.
For the case of small deformation of an elastic materialby a
rigid axisymmetric punch of smooth profile, isexactly 1 (note that
small deformation is achieved only ifthe half-included angle of the
indenter is close to 90).However, because real indentation
experiments are con-ducted with non-axisymmetric indenters and
involvelarge strains, other values for may be more
appropriate.Here, we review the factors that affect for
Berkovichindentation and attempt to draw some conclusionsconcerning
what value is best. The complex nature ofelasticplastic deformation
with pyramidal indentersmakes this a very difficult exercise with
results that arenot entirely satisfying.
The importance of correcting Eq. (6) was first recog-nized by
King,59 who used numerical methods to explorehow noncircular
geometries effect the elastic contactstiffness of materials tested
with rigid, flat-endedpunches. He found that that 1.012 for a
square-based indenter and 1.034 for a triangular punch. Thelatter
value has widely been adopted for instrumentedindentation testing
with a Berkovich indenter (a triangu-lar pyramid). Vlassak and Nix
later conducted indepen-dent numerical calculations for the
flat-ended triangularpunch using a more precise method and found a
highervalue, 1.058.60 Hendricks, noting that the
pressuredistribution for elastic deformation by a flat punch is
notrepresentative of the real elasticplastic problem,adopted
another approach to estimate .61 Assuming thepressure profile is
perfectly flat, he used simple elasticanalysis procedures to show
that 1.0055 for a Vick-ers indenter (square-based pyramid) and
1.0226 forthe Berkovich.
Finite element simulations have also been used toevaluate and
explore the factors that influenceit.25,26,29,30,32 Finite element
simulations have the advan-tage of including the effects of
plasticity, but are subjectto inaccuracies caused by inadequate
meshing and con-vergence. Larson et al.32 conducted full 3D finite
elementcalculations of true Berkovich indentation for a
purelyelastic material and for four different elasticplastic
ma-terials that simulate the behavior of aluminum alloys. Forthe
purely elastic material, they found that is slightlydependent on
Poissons ratio, , through the relation
= 1.2304 1 0.21 0.012 0.413 . (20)Assuming 0.3, this gives 1.14.
Note, how-
ever, that this solution applies to indentation of a
flat,elastic half-space and thus inherently ignores the fact
thatplasticity severely distorts the surface during the forma-tion
of the hardness impression. Because of this, one
might expect better results from the elasticplastic simu-lations
because they account for plasticity. For the fourelasticplastic
materials examined, the value 1.034suggested by King was found to
work well, producingerrors of no more than 6.5% in the contact area
andhardness.
Recent studies have shown that even for perfectly elas-tic
contact by a rigid cone, may deviate from unity dueto departures
from the small strain approximation. Hayet al.26 used both finite
element simulation and analyticaltechniques to examine indentation
of an elastic half-space by a rigid conical indenter. They showed
that thederivation used to obtain Eq. (6) with 1 is notstrictly
valid for the conical indenter geometry because itimproperly
accounts for radial material displacements inthe region of contact
(note: Hay et al. originally desig-nated this correction factor as
). They developed anapproximate correction for the effect that
gives
=
4 + 0.1548 cot 1 241 2 0.8312 cot 1 241 2
, (21)
where is the half included angle of the indenter. For 0.3 and
70.3, this expression gives 1.067.Although these observations
provide physical insightinto another important reason why should be
greaterthan unity, it is not clear that values derived fromEq. (21)
are particularly meaningful as they apply only toa flat elastic
half-space. However, the results do point outthat there may be a
dependence of on the cone angle,with smaller cone angles giving
greater s.
A thorough finite element study of elasticplastic in-dentation
with a 68 cone has been conducted by Chengand Cheng.29,30 Their
calculations encompassed a widerange of materials characterized by
different E/y ratios,Poissons ratios, , and work-hardening
exponents, n.The results are reported in two separate
publications.29,30The first, which focuses on nonhardening
materials, findsthat 1.05, independent of E/y and .30 In the
sec-ond, both hardening and nonhardening materials are con-sidered,
and it is reported that 1.085, independent ofE/y and n.29 Note that
there is a slight inconsistency inthe two papers in that the
non-work-hardening results inthe second paper give a different
value of from those inthe first. Therefore, which of these results
is better, ifeither, is not clear. We have conducted similar
finiteelement simulations ourselves for a 70.3 cone25 and findthat
1.07 for most materials, but may rise to highervalues in materials
with large E/y. Also, could beslightly higher in materials that
work harden.
The wide range of s reported in these studies makesit difficult
to settle in on a single preferred value. Whatcan be concluded,
however, is that there are valid reasons
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200412
-
to expect that for the Berkovich indenter should beslightly
greater than unity. The deviation from circularcross-section
appears to play an important role, as doesthe fact that the
original analysis from which Eq. (6) wasderived ignores the radial
displacements of the surfacefor a conical indenter. If we discard
the values derivedfrom elastic analyses of flat half-spaces, which
do notconsider the formation of the hardness impression,
theremaining values fall in the range 1.0226 1.085.Thus, 1.05 is
probably as good a choice as any, witha potential for error of
approximately 0.05. Carefullyperformed experiments and 3D finite
element simula-tions that take care to assure good convergence and
ac-curacy could help to resolve this issue.
IV. REFINEMENTS TO THE METHODA. Difficulties with the original
method
The ease of use of the method in a well-calibratedtesting system
has proven to be one of its great advan-tages. On the other hand,
the method we originally pro-posed for calibrating the load frame
compliance, Cf, andthe area function of the indenter has proven to
be cum-bersome and sometimes difficult to implement. We havethus
worked over the last several years to develop asimpler, more
accurate calibration procedure.
System calibrations are generally based on the relation
C = Cf +2Eeff
1
A, (22)
which simply states that the total measured compliance,C (i.e.,
the inverse of the measured stiffness), is the sumof the compliance
of the load frame (the first term) andthe contact (the second
term); that is, the two act likesprings in series. This assumes
that the load frame com-pliance is a constant independent of load.
If Cf is known,the area function can then be determined from
measure-ments of compliance as a function of depth. Alterna-tively,
if the area function is known, the load frame com-pliance can be
determined as the intercept of a plot of Cversus A1/2. To determine
these quantities simulta-neously, we originally suggested an
iterative procedurein which simple assumptions are made about the
startingvalues of Cf and the area function. Under certain
circum-stances, however, problems are encountered with
thisprocedure.
At shallow depths, corresponding to small contact ar-eas at the
beginning of an indentation experiment, thecontact compliance is
high and dominates the total meas-ured compliance (Eq. 22).
However, as the contact depth(and area) increases, the contact
compliance decreases,and at some point, the load frame compliance
becomesthe more dominant factor. Hence, for measurements at
large depths, the load frame compliance must be knownwith great
accuracy. The situation is reverse for the areafunction. The
macroscopic shape of the indenter at largedepths can be controlled
very precisely during its manu-facture. The uncertainty in the area
function is due todifficulties in producing a perfectly sharp tip,
which aremost important at small depths.
If the load frame compliance is low and the tip isrelatively
sharp, there is an intermediate depth range inwhich uncertainties
in Cf and the area function are in-consequential. In this case, the
iterative process for de-termining the area function and load frame
complianceconverges after a few cycles, and our original
calibrationmethod works well, albeit through a fairly tedious
cal-culation process. However, if the tip is not sharp or theload
frame compliance is high, the iterative process con-verges very
slowly and sometimes does not converge toa unique solution. Noise
in the data compounds this prob-lem. The method we have developed
to circumvent theseproblems is detailed in Sec. IV. E.
B. The indenter area functionOne aspect of the original method
that has produced a
great deal of confusion concerns the mathematical formof the
area function. The form we originally proposedwas
A = n=0
8
Cnhc2n
= C0h2 + C1h + C2h12 + C3h14 + + C8h1128 ,(23)
where C0 . . . C8 are constants determined by curve-fitting
procedures. We wish to make it perfectly clearhere that this
function was selected strictly for its abilityto fit data over a
wide range of depths and not because ithas any physical
significance. This being said, the equa-tion is, in fact, quite
convenient in describing a number ofimportant indenter geometries.
A perfect pyramid orcone is represented by the first term alone.
The secondterm describes a paraboloid of revolution, which
approxi-mates to a sphere at small penetration depths, and a
per-fect sphere of radius R is described by the first two termswith
C0 and C1 2R.57 The first two terms alsodescribe a hyperboloid of
revolution, a very reasonableshape for a tip-rounded cone or
pyramid that approachesa fixed angle at large distances from the
tip. One otherform with physical significance is that suggested by
Lou-bet et al.,62 which describes a pyramid with a small flatregion
on its tip, the so-called tip defect. This geometryis described by
the addition of a constant to the first twoterms in Eq. (23). In
each case, the experimentally de-termined constants can be compared
with the appropriategeometric description to verify the geometry.
The higherorder terms in Eq. (23) are generally useful in
describing
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 13
-
deviations from perfect geometry near the indenter tipand give
the experimenter some flexibility in developingan area function
that is accurate over several orders ofmagnitude in depth.
One other important aspect of the area function is thedepth
range over which it is to be used. There are anumber of choices
that can be made during the curve-fitting process that affect the
applicable range of thefunction. If the function is to be applied
at depths greaterthan the data used to construct it, one must be
concernedabout how the function extrapolates. By assigning
theconstant C0 associated with the quadratic term to a
valuedetermined by the face angles of the pyramid and re-stricting
the remaining constants to positive values, theresulting function
will approach the description of theperfect pyramid at large depths
and have no localmaxima or minima. This forces the results to be
reason-able at all depths. The alternative is to allow all of
theparameters to be fit and weight the fitting process to
theparticular depth range of interest. This procedure oftenyields a
function that fits the specified data better than thefirst
approach, but such functions may be highly inaccu-rate outside the
depth range used to construct them. Thisapproach may be preferable
when the function is to beused for repetitive measurements; for
instance, in qualitycontrol applications. Each of these approaches
is dem-onstrated in Sec. IV. E.
C. Load divided by stiffness squared, P/S2
One of the most important improvements to the cali-bration
procedures is based on an observation originallyreported by Joslin
and Oliver that the ratio of the load tothe stiffness squared,
P/S2, is a directly measurable ex-perimental parameter that is
independent of the penetra-tion depth or contact area provided the
hardness andelastic modulus do not vary with depth.63 In a
mannersimilar to Eq. (19), this follows by combining Eqs. (5)and
(6) to obtain
P
S2=
22H
E2. (24)
The utility of the parameter stems from its indepen-dence of the
contact area. Joslin and Oliver took advan-tage of this to evaluate
comparatively the mechanicalproperties of materials in which
surface roughness led touncertainties in the contact area. The
area-independenceof P/S2 also makes it valuable in the
determination ofload frame compliances. Stone et al.64 have
developedone such procedure, and the procedure we describeshortly
is also based on this principle. The basic idea isthat since P/S2
is not influenced by the area, the machinecompliance can be
determined in a manner that doesrequire a priori knowledge of the
area function. This
decouples the measurement of load frame compliancefrom the area
function and eliminates the need for aniterative procedure.
Another useful feature of P/S2 is that it does notdepend on the
pile-up or sink-in behavior. Hence, ifthe modulus of the material
is known, Eq. (24) canbe used to calculate accurately the hardness,
even whenthere is significant pile-up. Conversely, if the
hardnessis known (e.g., by direct measurement of the contactarea),
then the modulus can be determined. Unfortu-nately, this expression
does not allow one to calculate theeffect of pile-up on both the
hardness and the modulussimultaneously, unless, perhaps, the method
proposed byCheng and Cheng is proven to be experimentally
viable31(Sec. III. C).
Several other useful applications of P/S2 as a charac-terizing
parameter have been recognized in experimentalstudies. Saha and Nix
have shown that Eq. (24) is accu-rate for even films on substrates
provided the modulus ofthe film and substrate are similar.20 With a
known modu-lus, this facilitates the measurement of film hardness
in amanner that fully accounts for pile-up, which can bequite large
in many filmsubstrate systems.14 In a similarmanner, Page et al.22
have shown that P/S2 can directlybe correlated to the tribological
performance of coatedsystems.
D. Continuous stiffness measurementImprovements to measurement
and calibration proce-
dures have also been facilitated by advances in
testingtechniques and apparatus. One of the most important ofthese
is the continuous stiffness measurement tech-nique (CSM), in which
stiffness is measured continu-ously during the loading of the
indenter by imposing asmall dynamic oscillation on the force (or
displacement)signal and measuring the amplitude and phase of
thecorresponding displacement (or force) signal by meansof a
frequency-specific amplifier.1,24,65,66 As this tech-nique has
matured over the last 10 years, it has dramati-cally reduced our
reliance on unloading curves and offersseveral distinct advantages.
First, it has the clear advan-tage of providing continuous results
as a function ofdepth. Second, the time required for calibration
and test-ing procedures is dramatically reduced because there isno
need for multiple indentations or unloadings. Third, athigh
frequencies, CSM allows one to avoid some of thecomplicating
effects of time-dependent plasticity andthermal drift, which caused
so much consternation in ouroriginal calibration method. Fourth,
the CSM techniqueallows one to measure the effects of stiffness
changes aswell as damping changes at the point of initial
contact.This facilitates an important new technique for
preciselyidentifying the point of initial contact of the indenter
withthe sample.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200414
-
Defining the point of initial contact is the critical start-ing
point in the analysis of almost all instrumented in-dentation data.
The resolution in the load and displace-ment signals as well as the
data acquisition rates clearlyaffect how well one can determine the
location of thesurface. However, it is also important to be able to
re-solve and detect near-surface forces, as these often havean
important bearing on the interpretation of the surfacelocation.
Even in the simple case of sharp Berkovichdiamond contact with the
surface of fused silica tested inlaboratory air, there is at least
one important surfaceforcewater meniscus formation. Another
importantsurface effect is adhesion between the tip and the
sample.Because of these, techniques that use preloads or
back-extrapolation of the data to determine the point of
initialcontact can be misleading. The approach we prefer is
toobserve the entire mechanical response of the systembefore,
during, and after the point of initial contact andidentify the
point of contact by examining the overallobserved behavior. As
shown in the next section, infor-mation gleaned from CSM
measurements has proven in-valuable in this regard and has helped
significantly inidentifying the point of first surface contact.
E. Refined measurement andcalibration procedures
The procedure we now use to calibrate the machinecompliance and
indenter area function for a Berkovichindenter is based on
indentation of fused silica usingcontinuous stiffness measurement.
Fused silica is chosenfor many reasons, one of the most important
being that itdoes not pile-up because of its small E/H value. Here,
wedetail the procedure as we apply it to measurements withthe Nano
Indenter XP (MTS Systems Corp., Knoxville,TN). During continuous
stiffness measurement with thisinstrument, several parameters can
be controlled andmeasured. These include the harmonic load (the
ampli-tude of the oscillation in the load signal), the
harmonicdisplacement (the amplitude of the oscillation in the
dis-placement signal), the harmonic frequency (the fre-quency of
the oscillation), the phase angle (the angularphase shift between
the load and displacement oscilla-tions), and the harmonic
stiffness (which is derived fromthe other quantities).1,65,66 The
Nanoindenter XP is in-herently a force-controlled device, but
methods havebeen developed to keep the harmonic displacement
con-stant by means of feedback control.
The basic experiment begins with a slow approach tothe surface
to identify carefully the point of first contactbased on
measurements of load, displacement, and stiff-ness. The surface
approach velocity is 10 nm/s, with a3-nm oscillation in the
harmonic displacement at a fre-quency of 80 Hz. Clearly, a small
displacement oscilla-tion is desirable to avoid effects on the
total measured
displacement, but larger oscillations improve the
signal-to-noise ratio. A 3-nm oscillation was found to be
anappropriate compromise for fused silica. Once the sur-face is
detected, the indenter is loaded at a constant valueof (dP/dt)/P
0.3 (the loading rate divided by the load),which has the advantage
of logarithmically scaling thedata density so that there is just as
much data at low loadsas high. Constant (dP/dt)/P tests also have
the advantageof producing a constant indentation strain rate,
(dh/dt)/h,provided the hardness is not a function of the
depth.42For the first 400 nm of displacement, the harmonic
dis-placement is kept constant by feedback control at 3 nm.However,
when the displacement reaches 400 nm, theexperiment is paused for
10 s during which the harmonicdisplacement is increased and
stabilized at 8 nm to re-duce the noise levels in subsequent
measurements (Note:The interruption and increase in harmonic
displacementhas advantages in hard materials like fused silica,
butmay lead to measurement inaccuracies in soft materialslike
aluminum). The loading is then continued until themaximum load is
achieved (approximately 630 mN), af-ter which the indenter is
unloaded at a constant loadingrate dP/dt 19 mN/s to 10% of the
maximum load.After holding for 200 s to establish the thermal drift
ratefor correction of the displacement data using the tech-nique
described in the original method, the indenter iscompletely
unloaded. During the experiment, the load onthe sample, the
displacement into the surface, the har-monic load, the harmonic
displacement, and the phaseangle are all measured at a data
acquisition rate of 5 Hz.For the results reported here, the
experiment was re-peated 10 times for statistical averaging.
We also generated images of the residual hardnessimpressions
used in the calibration experiments to com-pare the areas deduced
from the indentation data to theactual contact areas. To do this,
the indenter was rasterscanned across the indented area at 2 m/s at
a small loadP 5 N to produce a fully quantitative topographicimage
of the deformed surface with a resolution of 512 256 pixels. The
scanning was accomplished by a mono-lithic, piezoelectrically
driven nanopositioning stage with100 100 m of travel and feedback
control based oncapacitive displacement sensors. The resolution,
accu-racy, linearity, flatness of travel, and settling time for
thestage are 2 nm, 2 nm, 10 nm, and 2 s, respectively. Theresulting
images, shown in Figs. 4 and 9, do not sufferfrom the distortion
typically associated with conven-tional scanning probe
microscopy.
A typical load versus displacement curve for the cali-bration
experiment is shown in Fig. 10. The curve, whichhas been corrected
for thermal drift, exhibits parabolicloading and power-law
unloading. Note that neither thepause during loading to increase
the harmonic displace-ment amplitude nor the pause during unloading
to meas-ure the thermal drift are apparent in the curves, thus
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 15
-
demonstrating that these interruptions do not influencethe data.
The stiffnesses measured by CSM during load-ing are shown in Fig.
11. Here again, the brief pause at400 nm is not evident.
Figure 12 shows a plot of load versus displacementenlarged to
examine the region of first contact. Figures13 and 14 are the
corresponding behavior for the har-monic displacement and phase
angle, respectively. In allthree cases, there is a clear change in
behavior corre-sponding to contact with the surface. Note, however,
thatthe change is smooth and continuous rather than
abrupt,resulting in some uncertainty in defining the point of
firstcontact. In contrast, the data in Fig. 15 shows that
theharmonic stiffness rises rapidly when contact is
achieved,thereby providing the best estimate of the surface
loca-tion. The effects of a very thin adsorbed layer (mostlikely
water) are also apparent; meniscus formation re-sults in a
measurable reduction in stiffness just prior tocontact. What
actually constitutes the point of first con-tact is debatable when
such effects occur; however, it cancertainly be identified to
within 2 nm.
Although the harmonic stiffness is the preferred loca-tor of the
surface in this particular situation, it should benoted that which
of the measurements in Figs. 1215provides the best surface
definition depends on the prop-erties of the material and the
characteristics of the testingsystem. The resonant frequency of the
testing system isparticularly important (12 Hz for the system used
here).As the stiffness of the contact increases, the
resonantfrequency of the combined instrument and contactsweeps
toward higher values. The exact nature of thechanges observed in
the dynamic measurements inFigs. 1315 then depends on whether the
system movestoward resonance (as in our experiments) or away from
itas contact is made. In fact, it is because the system movestoward
and through resonance that the harmonic dis-placement in Fig. 13
actually increases rather than de-creasing when contact is made.
Often, the most sensitivefrequency for surface detection is the
resonant frequencyof the testing system just prior to contact;
however, thisis generally also the frequency at which the system
ismost vulnerable to noise (vibration, and so forth).
FIG. 9. An indentation in fused silica made by raster scanning
with ananopositioning stage. Data obtained from this indentation
were usedto calibrate the load frame compliance and area function.
(a) Theimage on the left shows the borders defining the two contact
areasdiscussed in the text. (b) The image on the right is included
for clarity.
FIG. 10. Typical load versus displacement curve for a
calibrationexperiment in fused silica.
FIG. 11. A typical stiffness versus displacement curve for the
cali-bration experiment. Stiffnesses were determined using the
continuousstiffness measurement technique.
FIG. 12. An expanded view of the load versus displacement curve
atthe point of contact.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200416
-
Once the point of contact is determined, the data candirectly be
analyzed to determine the load frame compli-ance. The procedure we
now prefer is based on a plot ofP/S2 versus indenter displacement
like that shown in
Fig. 16. Note that S in this plot represents the stiffness ofthe
contact. To determine S, the component due to theload frame must
first be removed (Eq. 22). The basicprinciple for the load frame
compliance measurement isthat at depths greater than a few hundred
nanometerswhere the hardness and modulus of fused silica should
beindependent of depth, P/S2 should also be constant ac-cording to
Eq. (24). The proper load frame compliance isthen found by changing
the value of Cf until one is foundthat produces a flat P/S2 versus
h curve at large depths. Itis not necessary to know the area
function to implementthis procedure, so an iterative process is not
required.
The data at shallow depths must be ignored in thisprocedure
because there can be, and usually is, a realvariation in the
measured hardness due to the tip imper-fection. Tip blunting
results in lower mean pressures be-cause the contact behaves more
like a spherical indenteron a flat surface, for which the mean
contact pressurefalls to zero at zero depth. This is a real change
in themean pressure and not an artifact of an inaccurate
areafunction. As the load increases from zero, the contact willat
first be elastic; however, at some depth plasticity be-gins, and at
a still larger depth, full plasticity is estab-lished. At very
large depths, geometric similarity of theBerkovich pyramid together
with the homogeneous prop-erties of fused silica assure that the
mean pressure (orhardness) remains essentially constant as the
depth in-creases. These effects are evident in Fig. 16 as the rise
inP/S2 over the approximately first 500 nm of displace-ment. The
extent of the effect depends on the conditionof the indenter. For
severely worn tips, the region ofnonconstant H and P/S2 can extend
to much greaterdepths.
In Fig. 17, we demonstrate the load frame compliancemeasurement
procedure for three different assumed val-ues of Cf. The correct
value, Cf 9.62 108 m/N,results in a flat curve for the data between
1000 nm and2300 nm where the tip rounding is unimportant. How-ever,
increasing or decreasing Cf by as little as 20%
FIG. 13. An expanded view of the harmonic displacement
amplitudeversus displacement curve at the point of contact.
FIG. 14. An expanded view of the phase angle versus
displacementcurve at the point of contact.
FIG. 15. An expanded view of the harmonic stiffness versus
displace-ment curve at the point of contact. Note the minimum
observed priorto full contact and the steep rise in stiffness at
the point of contact.
FIG. 16. A typical load over stiffness squared versus
displacement forthe calibration experiment. Note the constant value
beyond 1000 nm.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 17
-
results in a rising or falling curve. From experience, wehave
found that the proper value of P/S2 for fused silicais 0.0015
0.0001 GPa1. This parameter is quite sen-sitive to errors in the
calibration of load, displacement,and load frame compliance. Hence,
the state of the sys-tem calibration can quickly be assessed by
checking thisparameter.
The value of load frame compliance measured in thisway is
applicable to any indentation experiment forwhich the contact
stiffness does not significantly exceedthe largest stiffness used
in the measurements. Note,however, that the region of applicability
cannot bejudged through the depth of the indentation or the load
onthe indenter; it must be assessed using the stiffness of
thecontact.
With the load frame compliance established and themeasured
stiffnesses corrected to remove the load framecontribution from the
displacements, the loaddisplacementstiffness data can be used to
deduce theindenter area function in a fairly straightforward
manner.The procedure begins using Eq. (3) with 0.75 todetermine the
contact depths corresponding to each datapoint on the loading
curve. The corresponding contactareas can be generated in two
different ways. If the faceangles of the indenter have precisely
been measured, aswe now do routinely, then the constant C0 in the
leadterm in the area function can be estimated from the per-fect
pyramidal geometry. Provided the indenter is rela-tively sharp, the
first term will dominate the area functionat large depths and can
be used to determine the large-depth contact area. By means of Eq.
(6), the quantityEeff at the largest depth can then be computed
from thestiffness and contact area using
Eeff =
2S
A, (25)
which in turn can be used to generate the contact areas atall
depths from the measured stiffnesses according to
A =
4S2
Eeff2 . (26)
The area function is then determined by fitting the Aversus hc
data to the form of Eq. (23).
Alternatively, if the indenter is not sharp or the faceangles
have not been measured, an assumed value for and Eeff for fused
silica can be used in Eq. (26) to gen-erate the areas. For fused
silica, we normally use E 72.0 GPa and 0.17, which in conjunction
with theelastic constants for diamond (E 1141 GPa; 0.07)gives Eeff
69.6 GPa. For , we most often use 1.034, although based on the
discussion in Sec. III. E, wemay now reconsider this choice. A
spherical indentercould also be calibrated in this way.
For the experimental data presented here (Figs. 10 and11), the
first approach was taken to determine the areafunction. A
back-reflection laser goniometer was used tomeasure the face angles
to within 0.025, giving C0 24.212. In precision work, this must be
modified if theindenter is not aligned with its axis perfectly
perpendicu-lar to the specimen surface, as such misalignments
in-crease the area at a given contact depth. The degree of tiltcan
be assessed from measurements of the sides of thehardness
impression if a good image is available. Asimple but effective
method is based on the ratio of thelong to short side of the
hardness impression. Figure 18shows how the contact area at a given
depth depends onthis ratio when the indenter is tilted slightly
toward anedge or a face. Other tilt directions lie in-between the
two
FIG. 17 Load over stiffness squared versus displacement for
threedifferent values for the load frame stiffness. The curve with
the correctload frame stiffness is flat at large depths.
FIG. 18. The change in the projected area of contact for a
tiltedBerkovich indenter versus the ratio of the lengths of the
longest to theshortest side.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200418
-
curves, and the equation shown in the figure is an
ap-proximation based on the average. From the image inFig. 9, the
ratio of the lengths of the sides is 1.14, re-sulting in a 2%
increase in the contact area and a cor-rected lead term of C0
24.65. With this value, the areacalculated at the largest depth is
67.0 0.3 m2, basedon an average of 10 measurements.
It is instructive to compare the calculated areas at thepeak
depth with those measured from images of the re-sidual contact
impressions. In Fig. 9(a), the inner whiteline traced around the
hardness impression encloses ex-actly the predicted area of 67.0
m2. Although there issome ambiguity as to where the true edge of
the contactis, it is clear that the predicted area is very close to
thatin the image. The outer white line in Fig. 9(a) is thetriangle
defined by the corners of the hardness impres-sion. The enclosed
corner-to-corner area is considerablylarger, about 97.5 m2,
indicating that one must be care-ful to account properly for the
bowing in or out of thecontact edges in the measurement of contact
areas.
To complete the area function calibration procedure,the other
coefficients in Eq. (23) must be determined bycurve-fitting the A
versus hc data. If the area function isintended for use over a wide
range of depth (e.g., 101500 nm), it is useful to fix the lead term
C0 using theaforementioned procedures based on the face angles
ofthe indenter and restrict the rest of the coefficients topositive
values. Fixing the lead term in this way assuresthat the area
function accurately extrapolates at depthslarger than those used in
the calibration, and forcing theother terms positive assures a
smooth area function. Forthe experimental data in Figs. 10 and 11,
the coefficientsfor the area function derived in this way are C0
24.65,C1 202.7, C2 0.03363, C3 0.9318, C4 0.02827, C5 0.03716, C6
1.763, C7 0.04102, andC8 1.881. The errors resulting from the fit
are shownin Fig. 19, where the fractional difference between
theexperimentally measured area and that predicted by thearea
function are plotted as a function of the contactdepth. For depths
greater than 200 nm, the area function
predictions are well within 1% of the correct values. Atsmaller
depths, the error increases to as much as 4%. Thiscan be improved
using the second approach for findingthe area function, limiting
the range over which the func-tion is fit, and placing no
restrictions on the coefficientsused in the fitting procedures.
Letting the depth rangebe 10500 nm, the area function derived in
this way as-suming Eeff 69.6 GPa has coefficients C0
24.261849693995, C1 388.715478479561, C2 937.723180561482, C3
251.535343527613, C4 451.330970778406, C5 219.019554856779, C6
157.740285820129, C7 98.1240614964975, andC8 72.6226884095761. More
significant digits mustbe included because the mix of positive and
negativecoefficients can produce significant round-off
errors.Figure 20 shows that this function works well over
thecontact depth range 10500 nm, but it should not be usedat larger
or smaller depths. In practice, one should care-fully assess the
experimental depth range of interest andtailor the area function
around it.
Finally, the results obtained here give us an opportu-nity to
comment on the value of . In deriving the areafunction by the first
method, a value of Eeff 69.5 0.14 GPa was obtained by means of Eq.
(25). Assum-ing that Eeff for fused silica indented by diamond
is69.64 GPa, then 0.998 0.002. Hence, these experi-ments suggest
that is unity for all practical purposes,although the experimental
uncertainty is about 5%.
ACKNOWLEDGMENTSResearch sponsored by the Division of Materials
Sci-
ences and Engineering, United States Department of En-ergy,
under Contract No. DE-AC05-00OR22725 withUT-Battelle, LLC, and by
MTS Systems Corporationthrough a research grant to the University
of Tennessee.The authors would like to express their sincere
gratitudeto Professor W.D. Nix for nearly 30 years of
continuousencouragement, support, guidance, and wisdom.
FIG. 19. Difference between the areas predicted by the area
functionand the data used to obtain the fit. This area function can
be used atlarge depths.
FIG. 20. Difference between the areas predicted by the area
functionand the data used to obtain the fit. This area function
works well atsmall depths but not at large.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 2004 19
-
REFERENCES1. W.C. Oliver and G.M. Pharr, J. Mater. Res. 7, 1564
(1992).2. G.M. Pharr, W.C. Oliver, and F.R. Brotzen, J. Mater. Res.
7, 613
(1992).3. J.B. Pethica, R. Hutchings., and W.C. Oliver, Philos.
Mag. A 48,
593 (1983).4. F. Frolich, P. Grau, and W. Grellmann, Phys.
Status Solidi 42, 79
(1977).5. D. Newey, M.A. Wilkins, and H.M. Pollock, J. Phys. E:
Sci. In-
strum. 15, 119 (1982).6. G.M. Pharr and W.C. Oliver, MRS Bull.
17, 28 (1992).7. G.M. Pharr, Mater. Sci. Eng. A 253, 151 (1998).8.
T.D. Shen, C.C. Koch, T.Y. Tsui, and G.M. Pharr, J. Mater. Res.
10, 2892 (1995).9. D. Stone, W.R. LaFontaine, P. Alexopoulos,
T.W. Wu, and
C-Y. Li, J. Mater. Res. 3, 141 (1988).10. W.D. Nix, Metall.
Trans. 20A, 2217 (1989).11. S.V. Hainsworth, H.W. Chandler, and
T.F. Page, J. Mater. Res.
11, 1987 (1996).12. M. Tabbal, P. Merel, M. Chaker, M.A. El
Khakani, E.G. Herbert,
B.N. Lucas, and M.E. OHern, J. Appl. Phys. 85, 3860 (1999).13.
S.V. Hainsworth, M.R. McGurk, and T.F. Page, Surf. Coat. Tech-
nol. 102, 97 (1998).14. T.Y. Tsui and G.M. Pharr, J. Mater. Res.
14, 292 (1999).15. T.Y. Tsui, J.J. Vlassak, and W.D. Nix, J. Mater.
Res. 14, 2196
(1999).16. S. Bec, A. Tonck, J-M. Georges, E. Georges, and J-L.
Loubet,
Philos. Mag. A 74, 1061 (1996).17. N.X. Randall, Philos. Mag. A
82, 1883 (2002).18. Y.Y. Lim and M.M. Chaudhri, J. Mater. Res. 14,
2314 (1999).19. K. Miyahara, N. Nagashima, and S. Matsuoka, Philos.
Mag. A 82,
2149 (2002).20. R. Saha and W.D. Nix, Acta Mater. 50, 23
(2002).21. J.A. Knapp, D.M. Follstaedt, S.M. Myers, J.C. Barbour,
and
T.A. Friedman, J. Appl. Phys. 85, 1460 (1999).22. T.F. Page,
G.M. Pharr, J.C. Hay, W.C. Oliver, B.N. Lucas,
E. Herbert, and L. Riester, in Fundamentals of
Nanoindentationand Nanotribology, edited by N.R. Moody, W.W.
Gerberich,N. Burnham, and S.P. Baker (Mater. Res. Soc. Symp. Proc.
522,Warrendale, PA, 1998), p. 53.
23. J. Mencik, D. Munz, E. Quandt, E.R. Weppelmann, andM.V.
Swain, J. Mater. Res. 12, 2475 (1997).
24. B.N. Lucas, W.C. Oliver, and J.E. Swindeman, in
Fundamentalsof Nanoindentation and Nanotribology, edited by N.R.
Moody,W.W. Gerberich, N. Burnham, and S.P. Baker (Mater. Res.
Soc.Symp. Proc. 522, Warrendale, PA, 1998), p. 3.
25. A. Bolshakov and G.M. Pharr, J. Mater. Res. 13, 1049
(1998).26. J.C. Hay, A. Bolshakov, and G.M. Pharr, J. Mater. Res.
14, 2296
(1999).27. T.A. Laursen and J.C. Simo, J. Mater. Res. 7, 618
(1992).28. H. Gao, C-H. Chui, and J. Lee, Int. J. Solids Structures
29, 2471
(1992).29. Y-T. Cheng and C-M. Cheng, J. Appl. Phys. 84, 1284
(1998).30. Y-T. Cheng and C-M. Cheng, Int. J. Solids Structures 36,
1231
(1999).31. Y-T. Cheng and C-M. Cheng, Appl. Phys. Lett. 73, 614
(1998).32. P-L. Larsson, A.E. Giannakopoulos, E. Soderlund, D.J.
Rowcliffe,
and R. Vestergaard, Int. J. Solids Structures 33, 221 (1996).33.
S.D.J. Mesarovic and N.A. Fleck, Proc. R. Soc. London A 455,
2707 (1999).34. B. Taljat, T. Zacharia, and G.M. Pharr, in
Fundamentals of Nano-
indentation and Nanotribology, edited by N.R. Moody,W.W.
Gerberich, N. Burnham, and S.P. Baker (Mater. Res. Soc.Symp. Proc.
522, Warrendale, PA, 1998), p. 33.
35. G.M. Pharr and A. Bolshakov, J. Mater. Res. 17, 2660
(2002).
36. A. Bolshakov, W.C. Oliver, and G.M. Pharr, in Thin
Films:Stresses and Mechanical Properties V, edited by S.P.
Baker,C.A. Ross, P.H. Townsend, C.A. Volkert, and P. Brgesen
(Mater.Res. Soc. Symp. Proc. 356, Pittsburgh, PA, 1995), p.
675.
37. K.W. McElhaney, J.J. Vlassak, and W.D. Nix, J. Mater. Res.
13,1300 (1998).
38. J-L. Loubet, B.N. Lucas, and W.C. Oliver, NIST Special
Publica-tion 896: International Workshop on Instrumented
Indentation(National Institute of Standards and Technology, San
Diego, CA,1995), pp. 3134.
39. B.N. Lucas, C.T. Rosenmayer, and W.C. Oliver, in Thin
FilmsStresses and Mechanical Properties VII, edited by R.C.
Camma-rata, M. Nastasi, E.P. Busso, and W.C. Oliver (Mater. Res.
Soc.Symp. Proc. 505, Warrebdale, PA, 1998), p. 97.
40. W.H. Poisl, W.C. Oliver, and B.D. Fabes, J. Mater. Res. 10,
2024(1995).
41. B.N. Lucas, W.C. Oliver, J-L. Loubet, and G.M. Pharr, in
ThinFilms: Stresses and Mechanical Properties VI, edited byW.W.
Gerberich, H. Gao, J.E. Sundgren, and S.P. Baker (Mater.Res. Soc.
Symp. Proc. 436, Pittsburgh, PA, 1997), p. 233.
42. B.N. Lucas and W.C. Oliver, Metall. Mater. Trans. 30A,
601(1999).
43. M.F. Doerner and W.D. Nix, J. Mater. Res. 1, 601 (1986).44.
I.N. Sneddon, Int. J. Eng. Sci. 3, 47 (1965).45. A.E.H. Love, Q.J.
Math. 10, 161 (1939).46. A.E.H. Love, Philos. Trans. A 228, 377
(1929).47. J.W. Harding and I.N. Sneddon, Proc. Cambridge Phil.
Soc. 41,
16 (1945).48. I.N. Sneddon, Fourier Transforms (McGraw-Hill, New
York,
1951), pp. 450467.49. J. Woirgard and J-C. Dargenton, J. Mater.
Res. 12, 2455 (1997).50. C-M. Cheng and Y-T. Cheng, Appl. Phys.
Lett. 71, 2623 (1997).51. H. Gao and T-W. Wu, J. Mater. Res. 8,
3229 (1993).52. H. Hertz, Miscellaneous Papers by H. Hertz
(Macmillan, London,
1896).53. K.L. Johnson, Contact Mechanics (Cambridge University
Press,
Cambridge, 1985).54. J.S. Field and M.V. Swain, J. Mater. Res.
8, 297 (1993).55. J.S. Field and M.V. Swain, J. Mater. Res. 10, 101
(1995).56. J.L. Hay, W.C. Oliver, A. Bolshakov, and G.M. Pharr, in
Funda-
mentals of Nanoindentation and Nanotribology, edited byN.R.
Moody, W.W. Gerberich, N. Burnham, and S.P. Baker(Mater. Res. Soc.
Symp. Proc. 522, Warrendale, PA, 1998),p. 101.
57. J.L. Hay and G.M. Pharr, in ASM Handbook Volume 8:
Mechani-cal Testing and Evaluation, 10th ed., edited by H. Kuhn
andD. Medlin (ASM International, Materials Park, OH, 2000),pp.
232243.
58. D. Tabor, The Hardness of Metals (Oxford University Press,
Lon-don, 1951).
59. R.B. King, Int. J. Solids Struct. 23, 1657 (1987).60. J.J.
Vlassak and W.D. Nix, J. Mech. Phys. Solids, 42, 1223
(1994).61. B.C. Hendrix, J. Mater. Res. 10, 255 (1995).62. J.L.
Loubet, J.M. Georges, O. Marchesini, and G. Meille, J. Tri-
bology 106, 43 (1984).63. D.L. Joslin and W.C. Oliver, J. Mater.
Res. 5, 123 (1990).64. D.S. Stone, K.B. Yoder, and W.D. Sproul, J.
Vac. Sci. Technol. A
9, 2543 (1991).65. J.B. Pethica and W.C. Oliver, Phys. Scr. 19,
61 (1987).66. J.B. Pethica and W.C. Oliver, in Thin Films: Stresses
and Me-
chanical Properties, edited by J.C. Bravman, W.D. Nix,D.M.
Barnett, and D.A. Smith (Mater. Res. Soc. Symp. Proc.
130,Pittsburgh, PA, 1989), p. 13.
W.C. Oliver et al.: Measurement of hardness and elastic modulus
by instrumented indentation
J. Mater. Res., Vol. 19, No. 1, Jan 200420