Embed Size (px)
Citation preview

Office of Coast Survey
Rob DownsCoast Survey AUV Project Manager
Board of HydrographersFebruary 19, 2014
AUV Operations on Ferdinand R. HasslerAUV Operations on Ferdinand R. Hassler

Office of Coast Survey
Operational ConceptOperational Concept• Force multiplier
• Multiple Bathymetric Mapping AUVs deployed from NOAA hydrographic survey vessels to increase data acquisition capabilities.
Functional RequirementsFunctional Requirements• Operating Platforms – NOAA Hydrographic Survey Vessels (HASSLER)• Operating Environment – Ports, harbors, and coastal areas• Operating Mode – Fully Autonomous or monitored
Data RequirementsData Requirements• Data must conform to standards in NOAA standards.• Data must be compatible with current data processing pipeline.
Operational RequirementsOperational Requirements• Shipboard infrastructure and personnel must be able to safely and effectively
support AUV operations.• The AUV must demonstrate a worthwhile benefit to efficient survey ops.• Support agreement must be in place between OCS, OMAO, and FH prior to
transition.
Bathymetric Mapping AUV Project

Office of Coast Survey
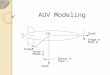
REMUS-600 AUV• LOA – 140 in• Diameter – 12.75 in• Weight in Air – 668 lbs• Max Depth – 300M (Limited by sonar transducers)• Endurance – >20 hours @ 4 knots• Navigation –
• Honeywell HG9900 IMU• RDI 600KHz DVL• L1/L2 GPS• NavP Software
• Communications• WHOI Acoustic Micro-Modem• Iridium • Wireless and Wired Ethernet
• Sensors• Kongsberg EM3002 Multibeam Sonar
(300KHz)• Neil Brown CT Sensor• Obstacle Avoidance Sonar (675 KHz)• Paroscientific Depth Sensor
REMUS-600 Specs

Office of Coast Survey
NOAA Ship Ferdinand R. Hassler Operations
Pier-Side Mock-Up Drills (Dec 2012)Pier-Side Mock-Up Drills (Dec 2012)
Underway Testing (Aug-Sep 2013)Underway Testing (Aug-Sep 2013)• Launch & Recovery Drills (Pier-side and
Underway)• Ten days integrated survey operations

Office of Coast Survey
NOAA Ship Ferdinand R. Hassler Overnight Operations
Expected BenefitsExpected Benefits• Maximize AUV mission time• Minimize interruption to ship ops
(One launch and recovery per day)• Launch & Recovery during daylight• Mission Prep and PMA during normal
workday• Less vessel traffic overnight• AUV much more visible on surface
(Strobe visible over 1NM away)
LimitationsLimitations• Mission Prep and PMA must be performed
by watch standers.• Significant faults would require nighttime
recovery.

Office of Coast Survey
NOAA Ship Ferdinand R. Hassler Lessons Learned
Launch & RecoveryLaunch & Recovery• Simplified rigging proved most effective.• Sea State limits same as small boat operations.
(Tested up to 4’)• LARS would improve safety & efficiency.
CommunicationsCommunications• WiFi
• Up to 1000M (500M typical)• Limited during recovery
• ACCOMS observed to 1600M• Iridium proved robust and essential
EnduranceEndurance• Average Battery consumption 4% per hour.• Multiple overnight missions (Up to 16 hours)

Office of Coast Survey
NOAA Ship Ferdinand R. Hassler Lessons Learned
System ReliabilitySystem Reliability• Navigation system integration issues
increased mission duration and limited operations.
• AUV Team Lead was occupied full-time resolving system and operational issues.
Fault Response & RecoveryFault Response & Recovery• AUV fault response is Mission Abort
• AUV adrift on surface.• Non-critical faults can be addressed without
recovering the AUV.
Possible Gains to Operational EfficiencyPossible Gains to Operational Efficiency• Remote launch & recovery.• Item investigation and gap coverage.

Office of Coast Survey
NOAA Ship Ferdinand R. Hassler Operational Challenges
Shipboard Shipboard InfrastructureInfrastructure
StaffingStaffing
EfficiencyEfficiency

Office of Coast Survey
Improving Risk ManagementImproving Risk Management
System ReliabilitySystem Reliability
Operations & Maintenance Operations & Maintenance Life Cycle CostLife Cycle Cost
Navigation RulesNavigation Rules
Overarching Challenges

Office of Coast Survey