Embed Size (px)
Citation preview
© THOMSON-CSF SEXTANT1
Objectives of the 3FMSObjectives of the 3FMSprojectproject
■ Prepare a functional definition of the European FMS tooperate free-flight
■ Investigate functional architecture of a free-flight FMS for theAIRBUS family (A3XX)
■ Explore the contributions the FMS can bring to the futureEuropean free-flight ATM definition
■ Identify interoperability issues on a world-wide basis
,1752'8&7,21
© THOMSON-CSF SEXTANT2
Expected AchievementsExpected Achievements
■ Identification of free-flight avionics architecture around theFMS
■ Definition of free-flight functions for the next generation ofFMS
■ Evaluation and demonstration of free-flight operations in flightsimulator
■ List of recommendations for implementation of future free-flight concepts in European ATM
,1752'8&7,21
© THOMSON-CSF SEXTANT3
3FMS Project3FMS Project key keyTechnical FeaturesTechnical Features
■ Address advanced on-board free-flight tactical FM functions
■ Build on state-of-the art FMS : SXT/SI New FMS
■ AIRBUS oriented design for HMI & avionics architecture
■ Demonstrate Free-flight FMS with communication functions andHMI
■ Use high fidelity AIRBUS simulator coupled with realistic ATCand Traffic simulators
,1752'8&7,21
© THOMSON-CSF SEXTANT4
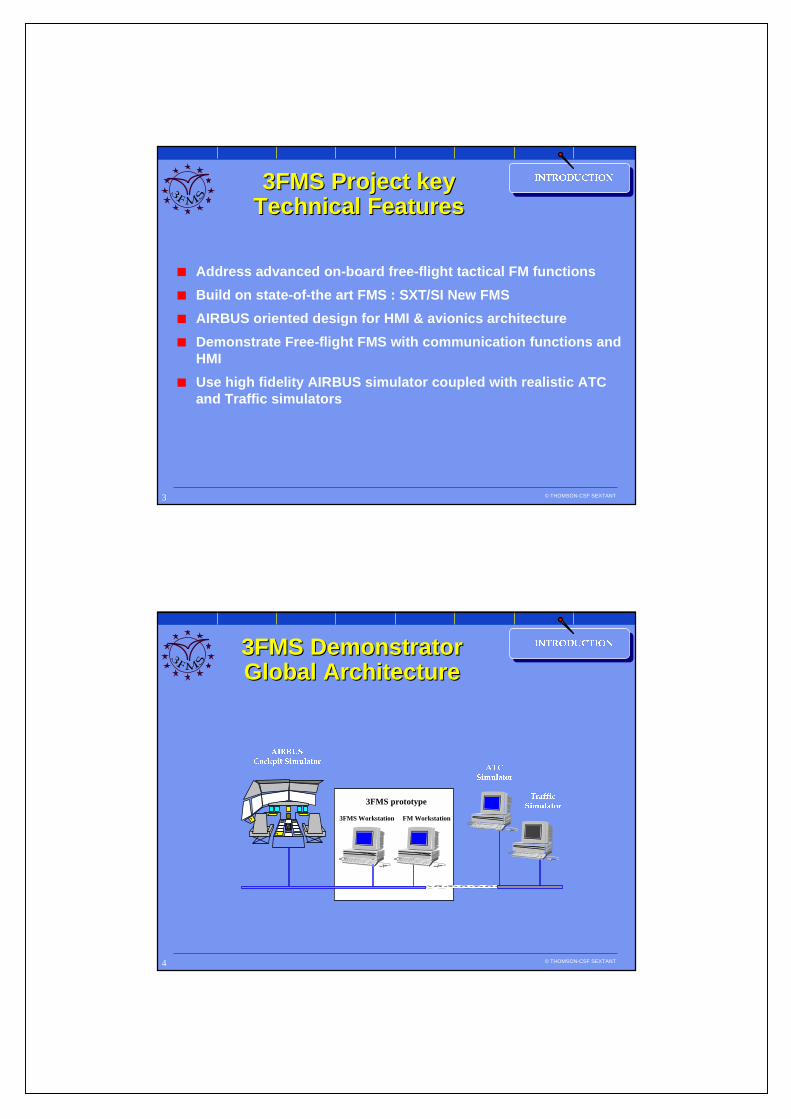
3FMS3FMS Demonstrator DemonstratorGlobal ArchitectureGlobal Architecture
3FMS prototype
,1752'8&7,21
$,5%86&RFNSLW�6LPXODWRU
$7&6LPXODWRU
7UDIILF6LPXODWRU
FM Workstation3FMS Workstation
© THOMSON-CSF SEXTANT5
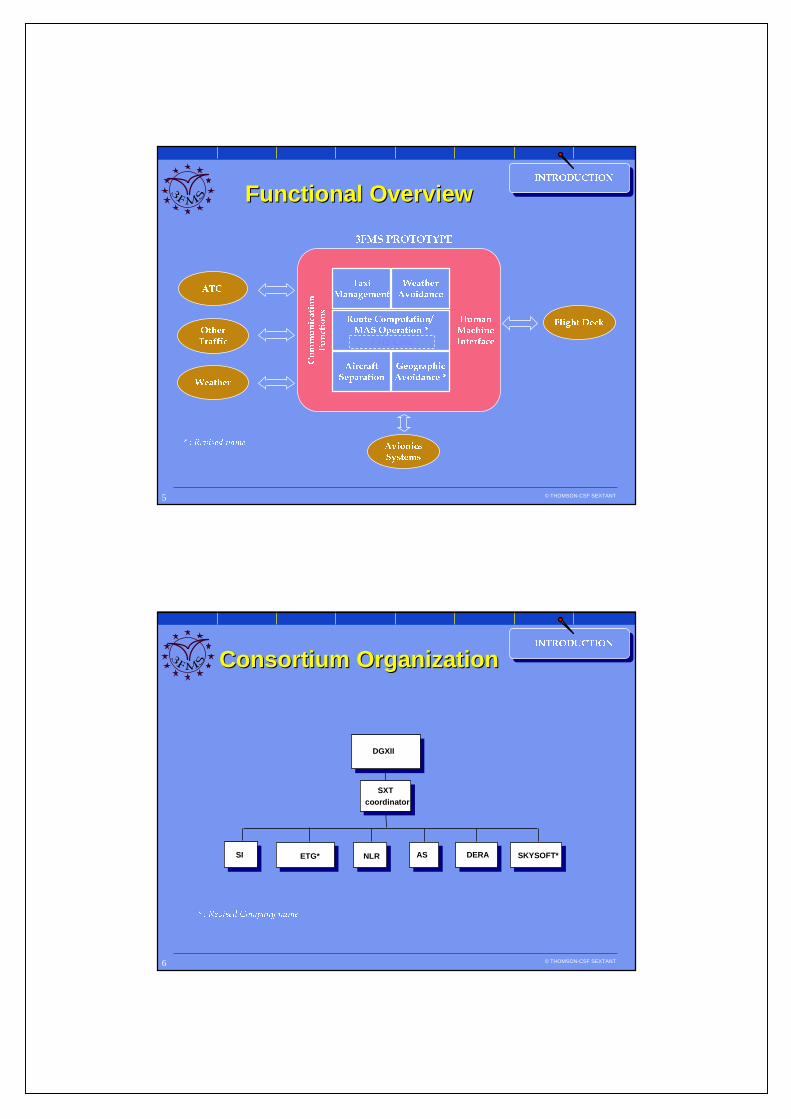
Functional OverviewFunctional Overview
&RPPXQLFDWLRQ
)XQFWLRQV
$7&�
2WKHU7UDIILF
5RXWH�&RPSXWDWLRQ��0$6�2SHUDWLRQ�
$LUFUDIW6HSDUDWLRQ
7D[L0DQDJHPHQW
:HDWKHU$YRLGDQFH
*HRJUDSKLF$YRLGDQFH�
)06�&RUH
+XPDQ0DFKLQH,QWHUIDFH
:HDWKHU
$YLRQLFV6\VWHPV
,1752'8&7,21
���5HYLVHG�QDPH
�)06�352727<3(
)OLJKW�'HFN
© THOMSON-CSF SEXTANT6
ConsortiumConsortium Organization Organization,1752'8&7,21
SI ETG* NLR AS DERA SKYSOFT*
SXTcoordinator
DGXII
���5HYLVHG�&RPSDQ\�QDPH
© THOMSON-CSF SEXTANT7
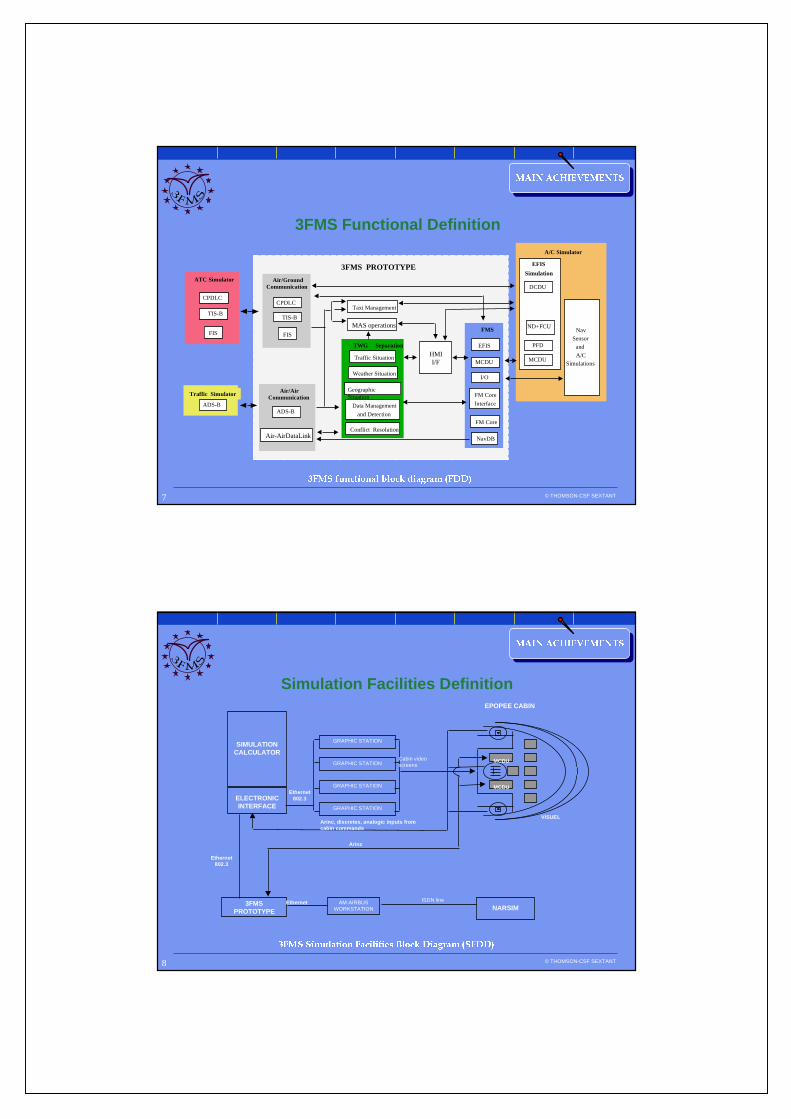
3FMS Functional Definition
A/C Simulator
Traffic Simulator
ADS-B
Weather Situation
Traffic Situation
GeographicSituation
Air/GroundCommunication
CPDLC
TIS-B
Air/AirCommunication
ADS-B
ATC Simulator
TIS-B
CPDLC
FIS
Data Management
and Detection
Nav
Sensor
and
A/C
Simulations
EFIS
Simulation
PFD
MCDU
DCDU
ND+FCU
Taxi Management
FMS
MCDU
EFIS
FM Core
Interface
I/O
FM Core
NavDB
HMII/F
MAS operations
3FMS PROTOTYPE
TWG Separation
Air-Air DataLink
FIS
Conflict Resolution
�)06�IXQFWLRQDO�EORFN�GLDJUDP��)''�
0$,1�$&+,(9(0(176
© THOMSON-CSF SEXTANT8
Simulation Facilities Definition
�)06�6LPXODWLRQ�)DFLOLWLHV�%ORFN�'LDJUDP��6)''�
VISUEL
MCDU
MCDU
EPOPEE CABIN
GRAPHIC STATION
GRAPHIC STATION
GRAPHIC STATION
GRAPHIC STATION
NARSIM3FMS
PROTOTYPEEthernet ISDN line
Arinc
Arinc, discretes, analogic inputs fromcabin commands
Cabin videoscreens
SIMULATIONCALCULATOR
ELECTRONICINTERFACE
AM-AIRBUSWORKSTATION
Ethernet802.3
Ethernet802.3
0$,1�$&+,(9(0(176

© THOMSON-CSF SEXTANT9
3FMS WS
TIS-B
CPDLC
MASOperation
TC
P/IP
Ethernet 802.3
WeatherSituation
TrafficSituation
GeographicSituation
ConflictResolution
TaxiManagement
FIS FM
_WS
Inte
rfac
e
Air/AirDatalink
ADS-B
HMI DisplayInterface
Terrain
Airspace
Airport
DataManagement
Detection
Spec
ific
Int
erfa
ce (
see
SFD
D)
FM WS
FM Core
NavDB
EFIS
FM CoreInterface
AD
SA
Ethernet 802.3
TCP/IP
MCDU
I/O
CPDLC responses Ownship ADS-B
Í 1Í 2
TRAFFIC SIMULATOR
1 52
Control InterfaceDisplay LogicDCDU Keypress (*)MCDU protocol (*)Simulation Data
ATC SIMULATOR
CPDLC messagesFIS messagesTIS-B messages
Í 3Í 3 & 4Í 3Í 4Í 4
AIRCRAFT SIMULATOR
43
Ethernet Line
FM ResponsesEFIS Display DataMCDU protocol (*)
Í 3Í 5Í 5
FM Requests3FMS/EFIS Addition DataDCDU Data (*)Taxi Data
Í 4Í 4Í 5Í 5
Í 3Í 3Í 3
ADS-B messages Í 3
(*) Other alternative is touse ARINC line
3FMS GENERAL DESIGN
�)06�)XQFWLRQDO�DOORFDWLRQ��*''�
0$,1�$&+,(9(0(176
© THOMSON-CSF SEXTANT10
3FMS-HMI
1DYLJDWLRQ�'LVSOD\�IRU�)UHH�)OLJKW��+0,''�
0$,1�$&+,(9(0(176
© THOMSON-CSF SEXTANT11
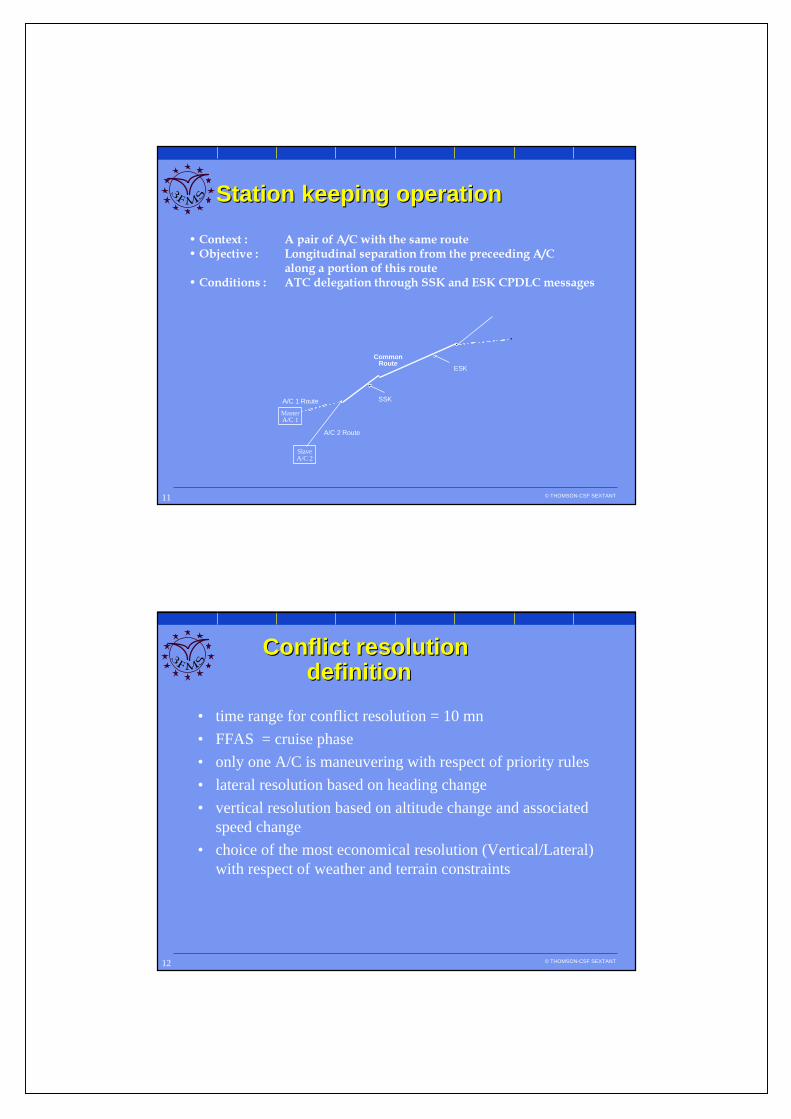
Station Station keeping operationkeeping operation
ESK
SSK
CommonRoute
A/C 2 Route
A/C 1 Route
SlaveA/C 2
MasterA/C 1
��&RQWH[W�� $�SDLU�RI�$�&�ZLWK�WKH�VDPH�URXWH��2EMHFWLYH�� /RQJLWXGLQDO�VHSDUDWLRQ�IURP�WKH�SUHFHHGLQJ�$�&
DORQJ�D�SRUWLRQ�RI�WKLV�URXWH��&RQGLWLRQV�� $7&�GHOHJDWLRQ�WKURXJK�66.�DQG�(6.�&3'/&�PHVVDJHV
© THOMSON-CSF SEXTANT12
Conflict resolutionConflict resolutiondefinitiondefinition
• time range for conflict resolution = 10 mn
• FFAS = cruise phase
• only one A/C is maneuvering with respect of priority rules
• lateral resolution based on heading change
• vertical resolution based on altitude change and associatedspeed change
• choice of the most economical resolution (Vertical/Lateral)with respect of weather and terrain constraints
© THOMSON-CSF SEXTANT13
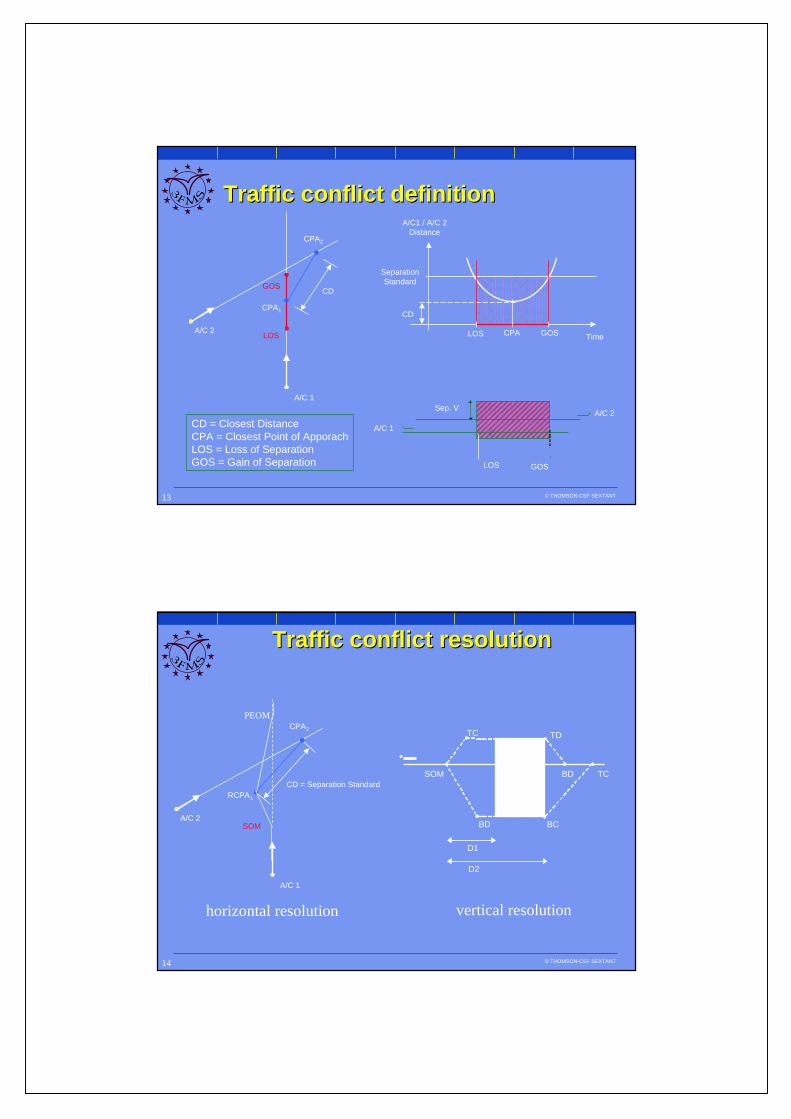
Traffic conflict definitionTraffic conflict definitionA/C1 / A/C 2
Distance
Time
SeparationStandard
CD
LOS
A/C 1
CPA1
CPA2
CD
A/C 2
CD = Closest DistanceCPA = Closest Point of ApporachLOS = Loss of SeparationGOS = Gain of Separation
CPA GOS
GOS
LOS
GOSLOS
Sep. V
A/C 1
A/C 2
© THOMSON-CSF SEXTANT14
Traffic conflict resolutionTraffic conflict resolution
A/C 1
RCPA1
CPA2
CD = Separation Standard
A/C 2SOM
PEOM
horizontal resolution vertical resolution
D2
D1
BD
TD
BD
TC
BC
TC
SOM
© THOMSON-CSF SEXTANT15
Terrain Terrain Conflict DetectionConflict Detection
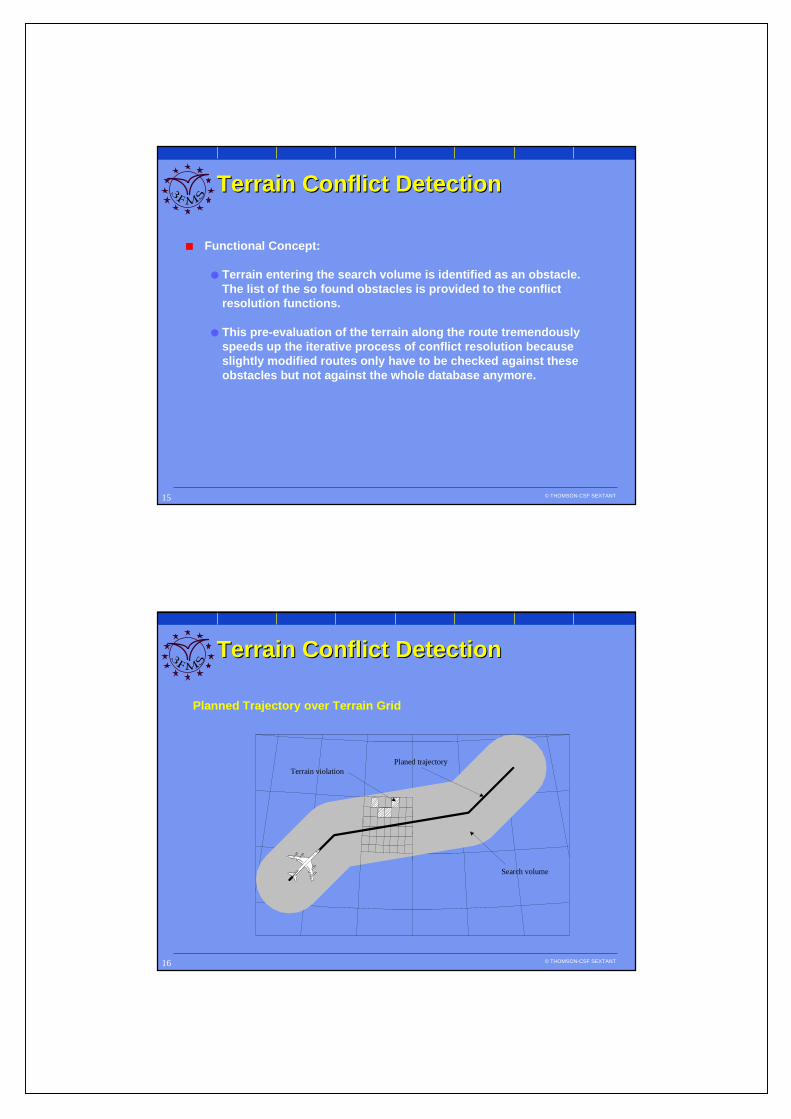
■ Functional Concept:
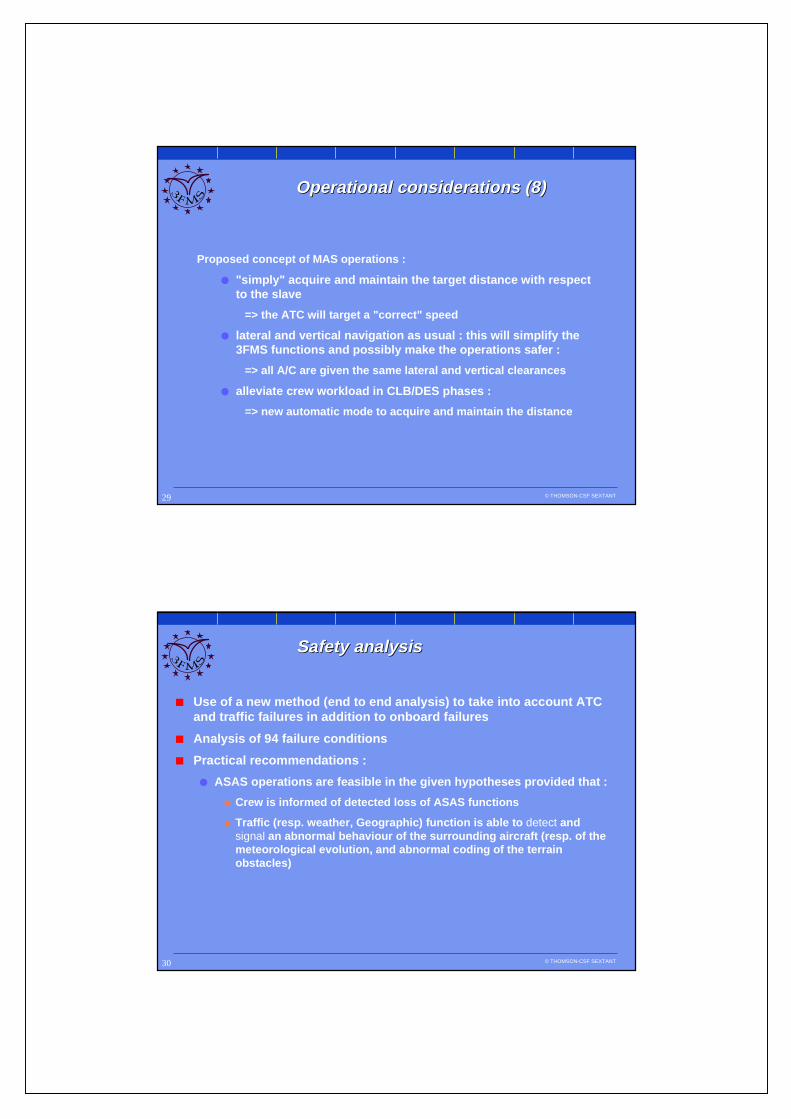
● Terrain entering the search volume is identified as an obstacle.The list of the so found obstacles is provided to the conflictresolution functions.
● This pre-evaluation of the terrain along the route tremendouslyspeeds up the iterative process of conflict resolution becauseslightly modified routes only have to be checked against theseobstacles but not against the whole database anymore.
© THOMSON-CSF SEXTANT16
Terrain Terrain Conflict DetectionConflict Detection
Terrain violation
Search volume
Planed trajectory
Planned Trajectory over Terrain Grid

© THOMSON-CSF SEXTANT17
Taxi ManagementTaxi Management
■ Taxi Management design is based on the future SMGCS concept
■ "Surface Movement Guidance & Control" (SMGC) is the attempt
● to ensure safety of airport surface traffic under growing trafficdensity and all weather conditions
● to improve efficiency of airport operation in view of limitedresources
■ SMGC is accomplished by cooperation between
● a ground system (SMGCS), to be provided by the airportauthorities
● "Taxi Guidance Systems" onboard the aircraft and the airportvehicles (follow-me car, fuel trucks, catering vans, and so on)
© THOMSON-CSF SEXTANT18
Taxi ManagementTaxi Management
■ For 3FMS the following constraints for the realisation of a taximanagement function exist:
● a ground system (SMGCS) is not available
● the traffic simulator will be capable to generate surroundingtraffic on ground
● the ATC simulator will provide a set of CPDLC messages relatedto ground movements
● the navigation display can be used for the taxi display
● airport databases are not yet commercially available, i.e. airportmaps have to be manually converted into a digital format

© THOMSON-CSF SEXTANT19
Taxi ManagementTaxi Management
■ Airport map is shown on the Navigation Display, new symbols willbe generated if necessary:
● own aircraft is shown
● other traffic is shown
● cleared taxi route is shown
● runway incursion alerts are presented
● command bars for speed and nose-wheel steering are shown
● the presentation can be manipulated by use of control unitsaround the navigation display (range, ...)
© THOMSON-CSF SEXTANT20
Taxi ManagementTaxi Management

© THOMSON-CSF SEXTANT21
Taxi ManagementTaxi Management
© THOMSON-CSF SEXTANT22
Operational considerations (1)Operational considerationsOperational considerations (1) (1)
■ 3FMS = opportunity to check impacts of ASAS onairborne side :
● systems : HMI - FMS - data-link
● crew :
◆ procedures
◆ pilots acceptability in an operational setting
● => need, during EPOPEE trials, to be representative ofa future ASAS function

© THOMSON-CSF SEXTANT23
Operational considerationsOperational considerations (2) (2)
■ Future ASAS operations should be :
● safe
● acceptable for crews => e.g. comfortable and low workload demanding:
◆ in the absence of conflicts => minimize communications
◆ in case of conflicts
(to be considered ROUTINE operations in FFAS, i.e. SOP)
● efficient (time, fuel) for airline acceptability
● comfortable for passengers => e.g. minimize manoeuvres
© THOMSON-CSF SEXTANT24
Operational considerationsOperational considerations (3) (3)
Crew tasks in FFAS :
● Manages the entry in the FFAS zone (A/C <-> ATC)
● Manages the activation of the onboard ASAS functions
● Checks/modifies ASAS - related Navigation and Surveillance parameters:
◆ RNP / EPE
◆ Surveillance parameters (see further)
◆ ETA / RTA at FFAS exit point
◆ conflict resolution criteria (TBD)
● Monitors Active Flight Plan for ASAS :
◆ traffic safe
◆ terrain + SUA safe
◆ weather safe

© THOMSON-CSF SEXTANT25
Operational considerationsOperational considerations (4) (4)
■ Crew tasks in FFAS (cont’d)
● Manages route of preference for non-conflict related tasks :
◆ being informed of new route proposed by FMS
◆ checking suitability of flight plan : ex : winds, geography (politics, fees…), turbulences, ETA/RTA and fuel
◆ making a decision : accept, reject, modify
◆ executing the decision
● Manages conflicts with traffic, terrain, weather :
◆ detection
◆ resolution
◆ compliance with mission goal : ETA/RTA at FFAS exit point + extra fuel
● Manages the exit from FFAS zone
● Manages the deactivation of ASAS onboard functions
© THOMSON-CSF SEXTANT26
Operational considerationsOperational considerations (5) (5)
Ex : operational concept for basic conflict resolution with traffic
● The resolutions shall be considered routine, not "video game"
● Automatic conflict detection by at least one of the A/C
● Automatic exchanges between A/C to confirm / acknowledge the conflict
● Inform all the crews at the same time and present them the conflict parameters
● Automatic consensual agreement between A/C about :
◆ which A/C modifies its trajectory
◆ which trajectories are modified
● Presentation of the result of the consensus to all the crews
● The crews will validate that result before the manœuvre(s) is (are) initiated

© THOMSON-CSF SEXTANT27
Operational considerationsOperational considerations (6) (6)
Crew tasks in MAS :
● Manages the SK clearance (A/C <-> ATC)
● Manages the activation of SK functions :
◆ In slave A/C, confirm the selection of the master, acknowledge theclearance and engage appropriate Navigation modes
◆ In master A/C, be informed that it is being followed and acknowledge theclearance
● Checks/modifies SK - related Navigation and Surveillance parameters :
◆ RNP / EPE
◆ actual distance / target distance
◆ Surveillance parameters : minimum and maximum distances, ...
© THOMSON-CSF SEXTANT28
Operational considerationsOperational considerations (7) (7)
Crew tasks in MAS (cont’d) :
● Manages conflicts (distance out of tolerance) :
◆ detection : manual (needed for response time considerations) orautomatic
◆ resolution : manual before ACAS intervention
● Manages the end of the application
© THOMSON-CSF SEXTANT29
Operational considerationsOperational considerations (8) (8)
Proposed concept of MAS operations :
● "simply" acquire and maintain the target distance with respectto the slave
=> the ATC will target a "correct" speed
● lateral and vertical navigation as usual : this will simplify the3FMS functions and possibly make the operations safer :
=> all A/C are given the same lateral and vertical clearances
● alleviate crew workload in CLB/DES phases :
=> new automatic mode to acquire and maintain the distance
© THOMSON-CSF SEXTANT30
Safety analysisSafety analysis
■ Use of a new method (end to end analysis) to take into account ATCand traffic failures in addition to onboard failures
■ Analysis of 94 failure conditions
■ Practical recommendations :
● ASAS operations are feasible in the given hypotheses provided that :
◆ Crew is informed of detected loss of ASAS functions
◆ Traffic (resp. weather, Geographic) function is able to detect andsignal an abnormal behaviour of the surrounding aircraft (resp. of themeteorological evolution, and abnormal coding of the terrainobstacles)
© THOMSON-CSF SEXTANT31
ResultsResults display prototype display prototypeevaluationevaluation
■ HMI regarding traffic information, conflict detection andresolution
■ Two variants of vertical situation display
■ Two levels of automation:
● strategic (3FMS simulated)
● tactical (non-FMS solution)
■ Results of evaluation (participation of 7 Technical and testpilots (France, Italy and the Netherlands))
© THOMSON-CSF SEXTANT32
Display prototypesDisplay prototypes
VSD: along HDG, distance axis VSD: along RTE, time axis

© THOMSON-CSF SEXTANT33
Two levelsTwo levels of automation of automation
■ Strategic:
● Conflict appears
● Systems determines priority
● In case of no priority, pilotselects either hori or vertiresolution (FPLN mod)
● Pilot activates resolution
● Conflict solved
● Look ahead time: 10 min
■ Tactical
● Conflict appears
● Pilot initiates resolution byHDG or V/S
● Pilot monitors progress
● Conflict solved
● Pilot returns to FPLN
● Look ahead time: 5 min
© THOMSON-CSF SEXTANT34
Evaluation environmentEvaluation environment

© THOMSON-CSF SEXTANT35
Free flight is a good concept for en-route traffic control
0
1
2
3
4
5
disa gre e - - - + ++ agr ee
Pre eval
Post eval
ResultsResults:: general general opinion opinionabout free flightabout free flight
Free flight is expected to be a solution.
Preliminary results
© THOMSON-CSF SEXTANT36
ResultsResults: look: look ahead times ahead times
The conflict was pre sente d early enough (strate gic)
0
1
2
3
4
5
disa gre e -- - + ++ agr ee
VS D, t ime, RTE
VS D, dis t, H DG
n o VS D
The conflict w as pre sented early enough (tactical)
0
1
2
3
4
5
dis agre e -- - + ++ agree
VSD, d ist , HDG
no VSD
Look ahead time of 10 respectively 5 min is OK.
Preliminary results
© THOMSON-CSF SEXTANT37
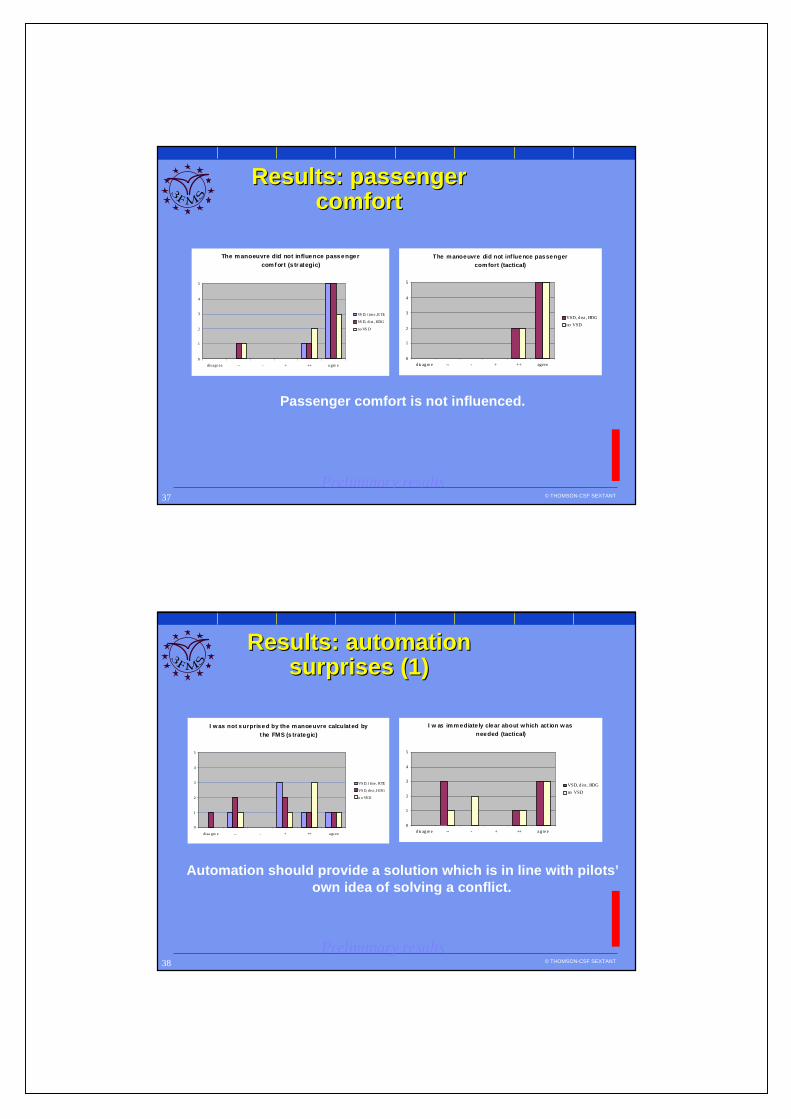
ResultsResults:: passenger passengercomfortcomfort
Passenger comfort is not influenced.
The m anoeuvre did not influence passenger com f ort (s tr ategic)
0
1
2
3
4
5
dis agr ee -- - + ++ a gre e
VS D, time, R TE
VS D, dist , HDG
no VS D
The m anoeuvre did not inf lue nce passenger com fort (tactical)
0
1
2
3
4
5
dis agre e -- - + ++ agree
VSD, dist , HDG
no VSD
Preliminary results
© THOMSON-CSF SEXTANT38
ResultsResults: automation: automationsurprises (1)surprises (1)
Automation should provide a solution which is in line with pilots’own idea of solving a conflict.
I w as not s urprise d by the m anoe uvre calculated by the FMS (s trategic)
0
1
2
3
4
5
disa gre e -- - + ++ agr ee
VS D, t ime, RTE
VS D, dis t, H DG
n o VS D
I w as im m ediate ly clear about w hich act ion w as needed (tactical)
0
1
2
3
4
5
dis agre e -- - + ++ agre e
VSD, dist, HDG
no VSD
Preliminary results

© THOMSON-CSF SEXTANT39
ResultsResults: automation: automationsurprises (2)surprises (2)
Actions to solve a conflict are clear, priority determinationprocess should normally be hidden
The r equire d ste ps for s olving the conflict are clear and e asy
0
1
2
3
4
5
disagree -- - + ++ agree
Strategic
Tactical
I was never confused about who had prior ity (strategic only)
0
1
2
3
4
5
disagree -- - + ++ agree
Preliminary results
© THOMSON-CSF SEXTANT40
ResultsResults:: traffic traffic in VSD in VSD
Traffic should not be presented in VSD, only the conflict and theresolution route
Traff ic s hould be displayed in V SD
0
1
2
3
4
5
disagree - - - + ++ agree
A lw ays
Only w hen
Corre lating the VSD w ith the HSD is e asy
0
1
2
3
4
5
disagree -- - + ++ agree
Time. RTE
Distance, HDG
Preliminary results

© THOMSON-CSF SEXTANT41
ResultsResults: one: one resolution resolution or ormoremore
Present only one resolution. A second best should be available,but should normally not be required.
I want to have more than one resolution manoeuvre to choose from
0
1
2
3
4
5
disagree -- - + ++ agree
Preliminary results
© THOMSON-CSF SEXTANT42
ResultsResults:: strategic vs strategic vstacticaltactical
Strategic operation is preferred.
(Strategic lowest workload, tactical best awareness)
Strategic operation is preferred over tactical operation
0
1
2
3
4
5
disagree -- - + ++ agree
Preliminary results
© THOMSON-CSF SEXTANT43
Conclusions (1)Conclusions (1)
■ Free flight is promising in the eyes of pilots
■ Traffic should be presented with little detail
■ Traffic at a long range should not be presented at all
■ Vertical situation display not to monitor the traffic situationin general, but to use in case of a conflict.
■ FMS should present one resolution only, while secondbest resolutions should available upon pilot request
© THOMSON-CSF SEXTANT44
Conclusions (2)Conclusions (2)
■ FMS resolution should correspond with pilot mental picture
■ Priority determination process should be hidden
■ VSD should contain V/S scale for estimating verticalmanoeuvre
General conclusion: KIS (Keep It Simple)

© THOMSON-CSF SEXTANT45
NARSIMNARSIM overview overview
EPOPEE DIS
CPDLC
Meteo
ATCo
Traffic
ASAS


















![x(q)(q) Tstr lFriiTut+ · 4T ,4+l etv al.r+nt, +d,Ts iq fuEE i dr.tr-fri Fiq aTftrc6n1 u6 sfrr+rt q Farq qd-ruE w{q q',rq fu*lr-,r;qr 1v-]!!r,iL1tlt:1g1-i,g9-1-in 4I q-s qljeq{ lrymn](https://img.pdfslide.us/doc/110x75/5ec3f4ce0d8885007d1e9d2c/xqq-tstr-lfriitut-4t-4l-etv-alrnt-dts-iq-fuee-i-drtr-fri-fiq-atftrc6n1.jpg)









