Embed Size (px)
Citation preview

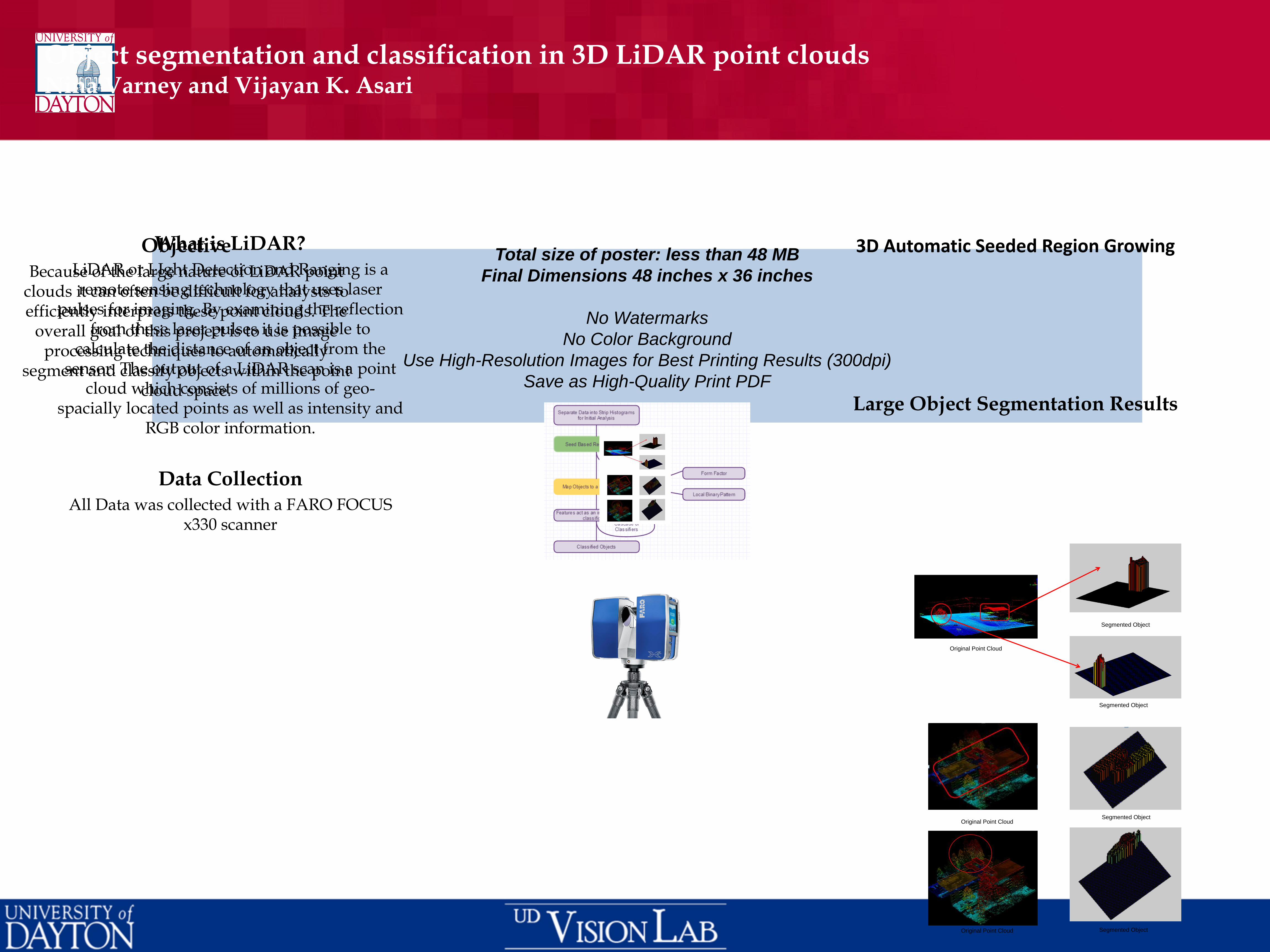
Object Segmentation and Classification in 3D LiDAR Point Clouds Nina Varney and Vijayan K. Asari
Data Collection All data was collected with a FARO FOCUS x330 scanner
What is LiDAR? LiDAR or LIght Detection and Ranging is a remote sensing technology that uses laser pulses for imaging. By examining
the reflection from these laser pulses it is possible to calculate the distance of an object from the sensor. The output of a LiDAR scan is a point cloud which consists of millions of
geospatially located points as well as intensity and RGB color information.
Objective The large nature of LiDAR point clouds can often make it
difficult for analysts to efficiently interprets point clouds. The overall goal of this project is to use image processing
techniques to automatically segment and classify objects within the point cloud space.
3D Automatic Seeded Region Growing
Seed selection based on similarity to neighbors and minimum Euclidean distance to neighbors
Large Object Segmentation Results
Future Work • Extraction of features based on adapted 2D Principal
Component Analysis (PCA)
• Use PCA reduced dimensionality features as an input to a support vector machine (SVM) classifier
Humanities Plaza
Kettering Labs
Humanities Building
Alumni Hall
Title: 96pt Bold Name: 88pt Bold
Advisor: 88pt
Headlines: 88pt Bold
Body Text: 72pt
Total size of poster: less than 48 MB
Final Dimensions 48 inches x 36 inches
No Watermarks
No Color Background
Use High-Resolution Images for Best Printing Results (300dpi)
Save as High-Quality Print PDF
Total size of poster: less than 48 MB
Final Dimensions 48 inches x 36 inches
No Watermarks
No Color Background
Use High-Resolution Images for Best Printing Results (300dpi)
Save as High-Quality Print PDF
Object segmentation and classification in 3D LiDAR point clouds Nina Varney and Vijayan K. Asari
3D Automatic Seeded Region Growing
Large Object Segmentation Results
What is LiDAR? LiDAR or LIght Detection and Ranging is a remote sensing technology that uses laser
pulses for imaging. By examining the reflection from these laser pulses it is possible to
calculate the distance of an object from the sensor. The output of a LiDAR scan is a point
cloud which consists of millions of geo-spacially located points as well as intensity and
RGB color information.
Data Collection All Data was collected with a FARO FOCUS
x330 scanner
Objective Because of the large nature of LiDAR point
clouds it can often be difficult for analysts to efficiently interprets these point clouds. The
overall goal of this project is to use image processing techniques to automatically
segment and classify objects within the point cloud space.
Original Point Cloud
Original Point Cloud
Original Point Cloud
Segmented Object
Segmented Object
Segmented Object
Segmented Object