Embed Size (px)
Citation preview

NURC- Partnering for Maritime Innovation
BHV_OpRegionBounce:
an OpRegion that can bounce you back
Stephanie Kemna
MOOS-DAWG 2011MIT, Cambridge, MA, USA

2PUBLIC RELEASE
NATO Undersea Research Centre: Underwater acoustics and ASW
− Cooperative Anti-Submarine Warfare
− Autonomous Naval Mine Countermeasures
− Ship and Port Protection
− Marine Mammal Risk Mitigation
− Maritime Situational Awareness
− Environmental Knowledge &Operational Effectiveness
1959: SACLANT
NATO maritime and transformational requirements
Seagoing research: Maritime innovation in NATO Nations

3PUBLIC RELEASE
OEX AUVs: Groucho & Harpo
3

4PUBLIC RELEASE
MIT/moos-ivp: BHV_OpRegion
If the vehicle hits the limit for perimeter, depth or altitude:
BHV_ERROR:
all DESIRED_* values to zero
Why is this a problem?

5PUBLIC RELEASE
March 2011 Engineering Trial

6PUBLIC RELEASE
March 2011 Engineering Trial (2)
Area with high fishing activity
Vehicle with waypoint close to perimeter
No communications with vehicle for a long, long time
Fear of the AUV having hit the perimeter and surfacing (due to positive buoyancy)

7PUBLIC RELEASE
Solution: Bounce
In case of OpRegion failure:
Perimeter: bounce away from perimeter
Depth/Altimeter: bounce to 'higher' depth
This will keep the vehicle at depth and safe.

8PUBLIC RELEASE
Behaviour Design
Starting from BHV_OpRegion
Add perimeter bounce (for every polygon)
– orthogonal to perimeter
Add depth bounce (for depth & altitude)
– bounce to 'higher' depth
Both: bounce buffer & no_zone

9PUBLIC RELEASE
Bounce buffer & no_zone
buffer ::activates bounce, utility: linear increasefor distance from buffer to limit.
no_zone_factor :: [ 0 – 1 ]buffer*factor = part with highest utility

10PUBLIC RELEASE
for every polygon
if distToPoly < bounce_buffer
then for every vertex i
if distToVertex < bounce_buffer
compute vertex angle a_i (from North)
a_i += 90 // orthogonal bounce
w_i = 1- (distToVertex – no_zone)
bounce_buffer
w_i *= maxutil
if w_i > maxutil
w_i = maxutil
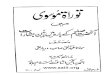
Perimeter Bounce:calculate course vectors
weight w_i: 0 to maxutil, linear increase with distance

11PUBLIC RELEASE
Perimeter Bounce:combine course vectors
// rescale all weights so that the max is 100// scale the weight of the bhv inversely
for every a/w combodetermine maxWeight
factor = m_maxutil/maxWeight;w_i *= factor;m_pwt_course = m_priority_wt/factor;
for every a/w combo
create a ZAIC_PEAK component(a_i,w_i)
extract the ZAIC IvP course function
rescale, because bhv weight (pwt) rather than util should reflect bhv importance/ influence

12PUBLIC RELEASE
if depth > (max_depth - depth_buffer)
safe_depth0 = max_depth - depth buffer - no_zone
w0 = 1-(((max_depth-no_zone)-depth)/depth_buffer)
if w0 > maxutil
w0 = maxutil
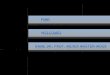
Depth Bounce (1):calculate depth vector for Depth
max_depth
depth_buffer
no_zone
safe_depth

13PUBLIC RELEASE
if altitude < (min_altitude + depth_buffer)
wanted_alt = min_altitude + depth_buffer + no_zone
diff_altitude = wanted_alt - curr_alt
safe_depth1 = depth – diff_altitude
w1 = 1-((curr_alt-(min_alt+no_zone))/depth_buffer)
if w1 > maxutil
w1 = maxutil
Depth Bounce (2):calculate depth vector for Altitude
convert from altitude to depthforcorrectcommand
min_altitude
depth_buffer
no_zone
safe_depth

14PUBLIC RELEASE
if (depth emergency && altitude emergency)
if (w0 > w1)factor = maxutil/w0w0 = maxutilw1 = w1*factor
if (w1 > w0)factor = maxutil/w1w0 = w0*factorw1 = maxutil
if (w0 = w1)w0 = maxutilw1 = maxutil
Depth Bounce:combine depth vectors (1)
rescale so that utilities are normalized to [0 - maxutil] given the highest calculated weight

15PUBLIC RELEASE
if (m_priority_wt > 100)
w{0/1} *= m_priority_wt/100
m_pwt_depth = w0 if it was highest, else w1
for safe_depth0 && safe_depth1, if present,
create a ZAIC_PEAK component(safe_depthi,wi)
extract the ZAIC IvP depth function
Depth Bounce:combine depth vectors (2)

16PUBLIC RELEASE
if depth_emergency && perimeter_emergency
* rescale lower_pwt function by higher_pwt
final_pwt = higher_pwt
ipf = coupler.couple(course ZAIC, depth ZAIC, rel_pwt_course, rel_pwt_depth)
ipf->setPWT(final_pwt);
elseoutput the one, or the other, or neither
BHV_OpRegionBounce:couple course and depth functions
17PUBLIC RELEASE
BHV_OpRegionBounce:coupler issues
BUT coupler seems to not properly process
the relative weights, therefore:
BHV_OpRegionBounce
BHV_OpRegionBounceDepth

18PUBLIC RELEASE
Testing - simulation
depth ok depth ¬ok
perimeter ok
perimeter ¬ok
2 polygons ¬ok
depth ok depth ¬ok
perimeter ok
perimeter ¬ok
2 polygons ¬ok
altitude ok altitude ¬ok

19PUBLIC RELEASE
Testing – simulation, results

20PUBLIC RELEASE
Testing: at sea : Groucho
21PUBLIC RELEASE
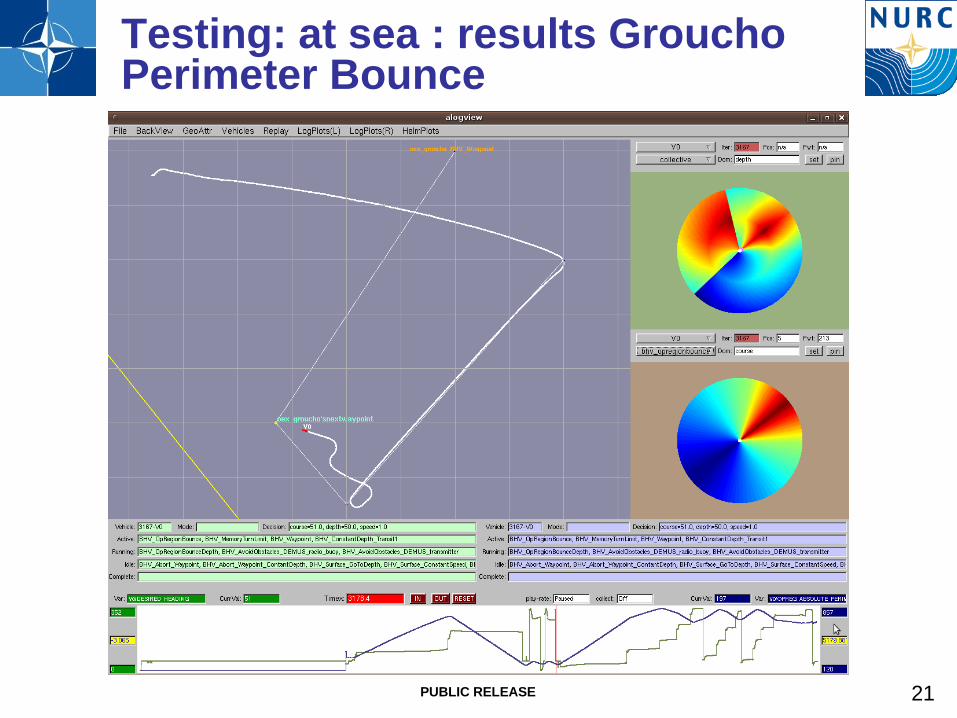
Testing: at sea : results GrouchoPerimeter Bounce

22PUBLIC RELEASE
Testing: at sea : Harpo

23PUBLIC RELEASE
Testing: at sea : results HarpoPerimeter Bounce

24PUBLIC RELEASE
Testing: at sea : results HarpoDepth Bounce

25PUBLIC RELEASE
Summary
BHV_OpRegion's produced error upon
OpRegion failure is not (always) desirable
for AUVs.
BHV_OpRegionBounce creates a bounce
orthogonal for perimeter, up for depth
Tested in simulation and at sea

26PUBLIC RELEASE
Conclusions / Future
To be used for our future sea trials.
Danger: infinite loops
- careful mission planning
Distribute / merge into BHV_OpRegion

27PUBLIC RELEASE
Questions