Embed Size (px)
Citation preview

1275
NUMERICAL STUDY OF DISPERSION AND NONLINEARITY EFFECTS ON TSUNAMI PROPAGATION
Alwafi Pujiraharjo1 and Tokuzo Hosoyamada2
Numerical study of dispersion effect for tsunami propagation for the case of Indian
Ocean Tsunami has been carried out using three model equations: Linear shallow water
(LSW) equations, Nonlinear shallow water (NLSW) equations, and Weakly-Nonlinear
Bossuineq-type (WNB) equations. Model simulation results are compared each other and
against observations data. General features of tsunami wave patterns are agree very well
using the three models but the WNB model produced development in time of tsunami
front face which caused by the dispersion effect. Two dimensional wave pattern and
spatial profile of sea surface are discussed to study the dispersion effect.
INTRODUCTION
Indian Ocean Tsunami (IOT) of 26 December 2004 is recorded as highest
tsunami. Triggered by tectonic earthquake, the tsunami waves are generated by a
complicated bottom uplift/downlift with multiple components of amplitude and
frequency. The tsunami was globally propagated over the world ocean as trans-
oceanic tsunami propagation. Very complicated structures of spatial and
temporal waves are observed by many researchers. For trans-oceanic tsunami
propagation, dispersion effect could be significant factor for prediction of
maximum amplitude. Kulikov (2005) reported the dispersion effect tsunami
waves in the Indian Ocean from wavelet analysis using satellite data record. In
the coastal area tsunami waves interact with very complicated bathymetry. Hence,
model equations which include both dispersive and nonlinear terms are needed
for better estimation.
Preliminary results of dispersive numerical model of IOT has been done by
Watts et al. (2005) using Boussinesq-type model. More detail study of dispersion
effect for IOT has been conducted using nonlinear shallow water, nonlinear
Boussinesq and the full nonlinear Navier-Stokes models by Horillo et al. (2006).
Grilli et al. (2007) also discussed the dispersion effect for IOT event. From the
discussions, the dispersion effect is noticed at the south-west direction, while at
the east part tsunami is essentially nondispersive.
The aims of this study is to reproduce simulation of IOT using three
different model equations as tools to study the dispersion effect of IOT at the
initial stage (up to 3 hours tsunami propagation). The models results are compare
each other and against observed data.
1 Department of Civil Engineering, Brawijaya University, Jln. MT Haryono 167, Malang, 65145, INDONESIA
2 Department of Civil and Environment Engineering, Nagaoka University of Technology, 1603 -1 Kamitomioka-machi, Nagaoka, Niigata, 940-2188, JAPAN

1276 COASTAL ENGIEERING 2008
MODEL EQUATIONS AND NUMERICAL SOLUTION
Description of model equations
Three sets of model equations are used here i.e.: a simple linear shallow
water (LSW) equations, nonlinear shallow water (NLSW) equations, and
extended weakly nonlinear Boussinesq-type (WNB) equations of Nwogu (1993).
Time-dependent of water depth (bottom) term is included to the models based on
derivation of Lynett and Liu (2002). By including the time-dependent water
depth, the models could be implemented to simulate tsunami generation by
tectonic plate motions, earthquakes and underwater landslides. The sets of model
equations contain equation for conservation of mass and momentum
conservation are taken in the following form
( ) ( ) ( )
( ) ( )
2 21 10 1 2 6
1
2( ) 0
t t
t
h h z h h
z h h h h
η + + ∇ ⋅ + γ η + γ ∇ ⋅ − ∇ ∇ ⋅
+ + ∇ ∇ ⋅ + =
u u
u
ɶ ɶɶ
ɶɶ
(1)
( ) ( )210 2( ) ( ) 0
t t b brt
g z z h h + ∇η + γ ⋅∇ + ∇ ∇ ⋅ + ∇ ∇ ⋅ + + − =
u u u u u F Fɶ ɶ ɶ ɶ ɶɶ ɶ (2)
where h is the still water depth, η is free surface elevation, g is the gravitational
acceleration, while h is time dependent water depth. Subscript t denotes partial
derivative with respect to time. Two-dimensional vector differential operator ∇
is defined by ( ),x y
∂ ∂∂ ∂
∇ = .
Equations (1) and (2) are full form of model equations used here. Setting
variables γ0 = γ1 = 1 and horizontal velocity vector ( , )u v=uɶ ɶ ɶ as velocity at an
arbitrary level, zɶ , reduces the model equations to WNB model equations in
which zɶ is recommended to be 0.531z h= −ɶ (Nwogu, 1993). Then setting γ0 = 1
and γ1 = 0 and using depth averaged horizontal velocity vector ( , )u v=uɶ i.e. by
taking 0z =ɶ yields the NLSW model equations. The LSW model equations
could be obtained by using depth averaged horizontal velocity vectors and
neglecting the nonlinear terms (γ0 = γ1 = 0).
The Fb and Fbr terms in (2) are the additional terms to accommodate bottom
friction and energy dissipation caused by breaking waves, respectively. The
bottom friction terms are given in quadratic formula. Although the friction
coefficient should be a function of bottom roughness and velocity profile but a
simple constant friction coefficient is used in this study. Eddy viscosity formula
is used to model the turbulent mixing and energy dissipation caused by breaking
waves. Treatment of wave breaking is similar to the eddy viscosity-type formula
proposed by Kennedy et al. (2000) and Chen et al. (2000).

COASTAL ENGINEERING 2008 1277
Numerical solution
In order to eliminate the error terms to the same form of dispersive terms in
the WNB model equations, fourth-order accuracy of numerical scheme for time
stepping and first-order spatial derivatives are used (Wei and Kirby, 1995). High
order predictor-corrector scheme is used for time stepping, employing third
order time explicit Adam-Bashforth scheme as predictor and fourth order Adam-
Moulton implicit scheme as corrector step. The corrector step must be iterated
until a convergence criterion is satisfied. The system equations are written in a
form that makes convenient for application high-order time stepping procedure
(see Appendix or Wei and Kirby, 1995).
A staggered grid system (C grid) in space is used to discretize spatial
derivatives as shown in Fig. 1. The horizontal velocity vectors (u, v) and sea
level (η) are organized into triplets as visualized by triangle in Fig. 1. The water
depth is defined at the same point of sea level at the cell center, while vectors
such as velocity components u and v are defined at the interfaces of the cell. At
the cell interface, scalars are obtained by linear interpolation. For example, the
total water depth at u point can be obtained by
( ) ( ) ( )1 1, , 1, 1,2 2
,i j i j i j i j
i jh h h + ++ η = + η + + η (3)
Spatial discretizations are required for various orders of spatial derivatives on
the right-hand side of (A-1) which include first-order, second-order and second-
i
i+1
i-1
j
j-1
j+1
∆x
∆y
(η, h)i,j
ui,j
vi,j
Fig. 1 Staggered grid system for spatial discretization

1278 COASTAL ENGIEERING 2008
order cross derivatives. The first-order derivative of ( )f h u= + η in the x
direction is discretized by four-point finite difference method to eliminates fifth-
order physical dispersion in the governing equations as follows
( )2, 1, , 1,
,
127 27
24i j i j i j i j
i j
ff f f f
x x− − +
∂ = − + −
∂ ∆ (4)
The fourth-order accurate for first-order space derivative of η at u-point is
( )1, , 1, 2,
,
127 27
24i j i j i j i j
i jx x
− + +
∂η = η − η + η − η
∂ ∆ (5)
And the first-order derivative of u2 in the x direction is discretized by the
following scheme
2
2 2 2 2
2, 1, 1, 2,
,
1( ) 8( ) 8( ) ( )
12i j i j i j i j
i j
uu u u u
x x− − + +
∂ = − + − ∂ ∆
(6)
Three-point central scheme is used for second order derivatives in the x direction
as
2
1, , 1,2 2
,
12
i j i j i j
i j
ww w w
x x− +
∂ = − + ∂ ∆
(7)
where w = u or (hu). Similar expressions can be obtained in the y direction for
both first-order and second-order derivatives. The cross-derivative terms in the x
direction of uxy and (hu)xy are approximated by the following finite difference
scheme
2
1, , 1 1, 1 ,
,
1i j i j i j i j
i j
ww w w w
x y x y− + − +
∂ = + − − ∂ ∂ ∆ ∆
(8)
Again, w = u or (hu) and similar expressions can be obtained in the y direction
for vxy and (hv)xy.
NUMERICAL SIMULATION AND DISCUSSIONS
Simulation domain
The numerical models are then applied to make simulation of Indian Ocean
Tsunami event. In order to minimize the grid size and achieves resolution but
accommodate gauges and satellite data, numerical domain is selected around
Bay of Bengal from longitude 700E – 100
0E and latitude 7
0S – 23
0N. Bathymetry
data is taken from ETOPO2 databank and refined into one minute resolution by
linear interpolation resulting 1800 by 1800 of grid points. The mean water level
specified in the model simulation did not include the effects of tides. Spherical
and Coriolis effects also did not include in the models computation.
Radiation boundaries are applied at the south, west and east part of
numerical domain by adding sponge layers at the corresponding boundaries.

COASTAL ENGINEERING 2008 1279
Artificial slot technique for treatment ‘wet-dry’ condition for runup of Chen et al.
(2000) and Kennedy et al. (2000) is used here. The continuity equation (1) must
be modified to implement the artificial slot. Detail of implementation of artificial
slot technique for runup treatment is referred to Kennedy et al. (2000) and Chen
et al. (2000). Constant bottom friction coefficients of 0.001 and 0.0 are applied
when the water depth less and greater than 1 km, respectively.
Tsunami generation
Grilli et. al. (2007) studied source model of IOT. The tsunami source is
developed based on rupture (seafloor deformation) parameters which estimated
by seismic inversion model and other seismological and geological data.
According to rupture trench, Grilli et al. (2005) divided the rupture zone into
five segments following the trench curvature. Parameter for each segment was
characterized and defined by seismic inversion model. The geometry of rupture
then estimated by using Okada’s (1985) formulae. The area of five segments
rupture is presented in Fig. 2 (left panel). Parameters to determine Okada’s static
dislocation formulae for each rupture segment can be obtained in Grilli et al.
(2007). The five segments of ruptures then used to find the best tsunami source
after it is calibrated to the recorded data of Jason 1 satellite altimetry as
published in Gower (2005) and Kulikov (2005). The final form of seafloor
deformation geometry is superposition of the five rupture segments and shown in
Fig. 1 (right panel).
To obtain a good agreement of sea surface along Jason 1’s satellite transect,
five rupture segments are generated in different starting time and rising time of
vertical seafloor movement based on average shear wave speed about 0.8 km/s
from the south to the north. Table 1 presents starting time and rising time of
vertical seafloor movement of each rupture segment. Fig.2 shows comparison of
free surface elevations between numerical results and Jason 1’s satellite altimetry
data. Model simulation using NLSW model and WNB model show a good
agreement with measured data of Jason 1.
Dispersion effect
To investigate the dispersion effect of tsunami propagation, numerical
results of NLSW model and WNB model are compared. As the first check to
visualize the dispersion effect, snapshot window of sea surface pattern at time 1
hour 40 minutes of tsunami propagation is depicted as shown in Fig. 4. General
features of wave evolution agreed very well by all models approach (i.e. LSW,
NLSW, and WNB models). However, some differences in reproducing
dispersion effect become more noticeable as time advances and longer distance
of propagation. The figure shows that the main of tsunami is propagated to the
south-west direction, i.e. Maldives islands. Wave pattern at the west part
simulated by WNB model is slightly different compare to the NLSW model
result. The tsunami front face is shifted and split into more then one wave
yielded a series of wave propagation in which the first one has higher amplitude
and longer period than the last one. The dispersive effect is proportional to the

1280 COASTAL ENGIEERING 2008
water depth, so the dispersive effect at the west part of the source is stronger
compare to the east part. The dispersion effect at the west is also enhanced
through longer distance of propagation. At the east direction, the computation of
wave pattern by NLSW model and WNB model is not significantly different.
Beside shallowness of water depth at this area, the dispersion effect did not have
enough time to developed because of short distance propagation.
Table 1. Generating time and rising time for seafloor deformation to generate tsunami.
Segment 1 Segment 2 Segment 3 Segment 4 Segment 5
t0 (s) 0 185 315 360 420
Trise (s) 60 70 90 120 150
-4000
-3000
-2000
-4000
-500
0
92 94 96
4
6
8
10
12
+1
-1
-4000
-3000
-2000
-4000
-500
092 94 96
4
6
8
10
12
S1
S2
S3
S4
S5
Sumatra Sumatra
Fig. 2 Locations of five rupture segment as tsunami source and final
form of source elevation as combination of five Okada source
determined by Grilli et al. (2007).

COASTAL ENGINEERING 2008 1281
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-7 -5 -3 -1 1 3 5 7 9 11 13 15 17 19N -latitude (deg)N -latitude (deg)N -latitude (deg)N -latitude (deg)
surface elevation (m)
surface elevation (m)
surface elevation (m)
surface elevation (m)
Jason 1 satellite data
NLSW m odel
W NB m odel
Fig. 3 Comparison of surface elevation measured with Jason 1
satellite altimetry and results of model simulation using NLSW
model and WNB model.
85 90 952
4
6
8
10
12
85 90 952
4
6
8
10
12
Sumatra
Sumatra
Sri
Lan
ka
C1
C1
Fig. 4 Snap shot window of surface elevation at time 1h 40min of tsunami
propagation computed by: (a) NLSW model and (b) WNB model.
N-l
ati
tud
e (d
egre
es)
E-longitude (degrees)
(a)
(b)

1282 COASTAL ENGIEERING 2008
Spatial profiles of sea surface along transect line C1 as shown in Fig. 4 is
presented in Fig. 5 at time 3 hours tsunami propagations to visualize more detail
of the dispersion effect. Generally, agreement between the dispersive and non-
dispersive model is very good but after long distance propagation to the south-
west direction the advantage of dispersive model is remarkable. Initially, free
surface profiles produced by WNB and NLSW models are not significantly
different. But after long time and long distance propagation through relatively
deep water, the front face profile is gradually different. The tsunami front face is
oscillated and changed by the dispersion effect. According to Fig. 5, at time t = 3
hours the WNB model yields at least three waves of tsunami front face at the
south-west direction along line C1 with the wavelength of first, second, and third
waves are 141, 83, and 64km, respectively, measured from trough to trough. The
average water depth is h ≈ 5 km, therefore the corresponding values of kh for the
three waves are 0.2206, 0.3747, and 0.486, respectively. According to the value
kh, the second and third waves are categorized as intermediate water wave.
Hence, the NLSW model is less accurate for this case. Although the second and
third waves are categorized as intermediate water wave, the approximation of
dispersive term in WNB model still give accurate estimation of wave speed
because the values of kh < 1. The leading wave height at this time is over
predicted more than 20 % by the NLSW model.
74 74.5 75 75.5 76 76.5 77
-1
0
1
2
90 91 92 93 94 95-1
-0.5
0
0.5
1
75 80 85 90 95
-1
0
1
2 time = 3.0 hours
LSW model NLSW model WNB model
E-longitude (degrees)
sea
lev
el (
m)
Fig. 5 Spatial profile of sea level along line C1 at t = 3 hours

COASTAL ENGINEERING 2008 1283
At the east part, the agreement between NLSW and WNB model results are
quite good. When tsunami wave entered runup phase, nonlinear interaction with
complex bathymetry strongly influenced the dispersion effect. The LSW model
is less accurate for tsunami runup through complicated bathymetry. Horillo et al.
(2006) pointed out that the dispersion consideration in the numerical models is
necessary for accurate prediction for the cases of tsunami entered continental
shelf, bays or harbors in which tsunami produced oscillations through the
resonance. However, there are no established coastal observations which clearly
represent dispersion mechanism.
Tide gauges
Following Grilli et al. (2007), measured data of tsunami elevations
around simulation domain are compared to the model results. Only three gauges
locations are discussed here, two tide gauges at the Maldives: Hannimadhoo
(73.170E, 6.77
0N) and Male (73.54
0E, 4.23
0N), and one by a Belgian yacht
‘’Merchator’’ at Nai Harn Bay (SW of Phuket). The measured data is digitized
from Grilli et al. (2007). All of model simulations overpredicted of tsunami
arrival times at all locations. Generally, the simulated and measured time history
of tsunami elevations agree very well in all tide gauges as shown in Fig. 6. It is
noted that because of coarseness of bathymetry data used here, the locations of
tide gauges are not perfectly match between models and observations.
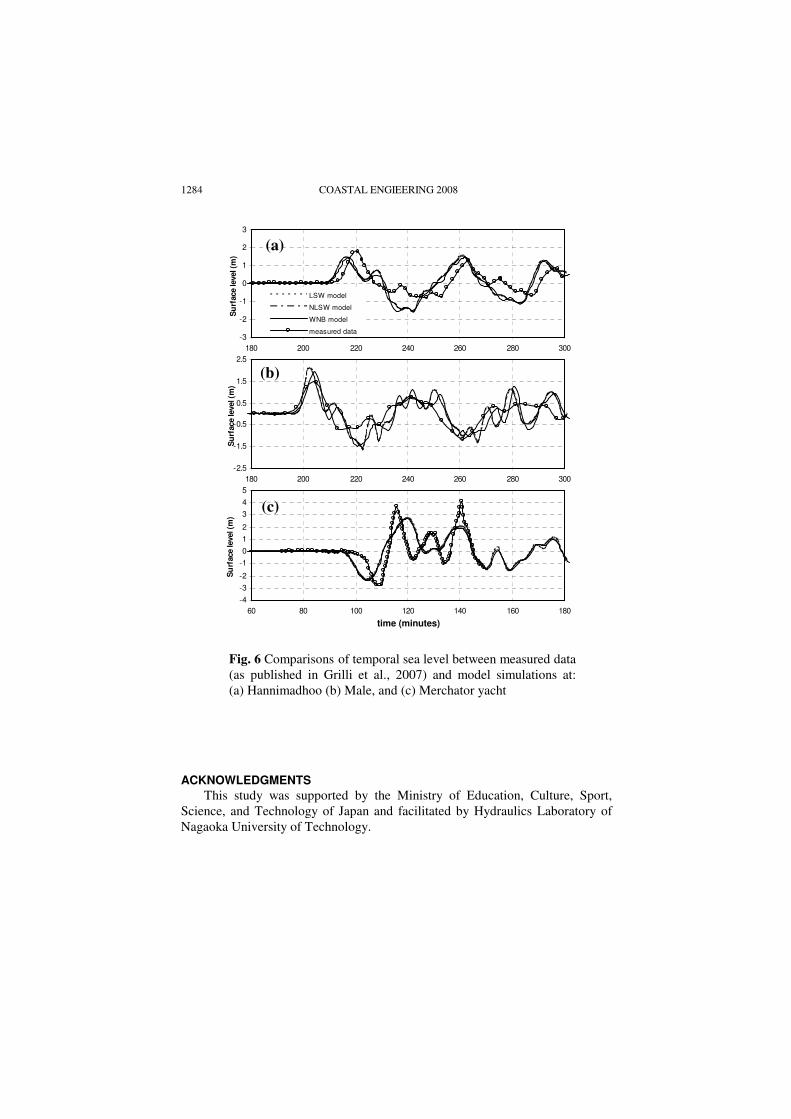
At the Maldives as shown in Fig. 6 (a and b), it can be seen a good
agreement between observed and model results. General pattern of temporal
variation of sea levels are match with observations data for at least three waves.
After long distance propagation, the dispersion effect is noticed at those gauges.
However, the bathymetry effect is reduced the dispersion effect created by WNB
model, hence, similar results are obtained by NLSW model and WNB model but
the NLSW model over predicted of maximum height compare to WNB model
and measured data.
In Fig. 6c, the NLSW and WNB models show same results. Compare to the
observations data of yacht Merchator, the profile is not match. Local coastal
topography effect is not resolved very well by the models, so the time shift is
different between models and measurement. Maximum height is underpredited
by the models. Therefore, finer grid resolution at the east area is needed for
better estimation.
CONCLUSSIONS
Numerical simulation of the December 26, 2004 Indian Ocean tsunami has
performed using three model equations. Comparisons of simulation results using
the three models notified the dispersion effect especially through oceanic
tsunami propagation. Simulation results using the three different model equations
yielded that the NLSW model is quite reliable for practical purpose because this
model gives consistent results compare to WNB model and observations data.
However, including the dispersive terms improve accuracy of the prediction.
1284 COASTAL ENGIEERING 2008
ACKNOWLEDGMENTS
This study was supported by the Ministry of Education, Culture, Sport,
Science, and Technology of Japan and facilitated by Hydraulics Laboratory of
Nagaoka University of Technology.
-3
-2
-1
0
1
2
3
180 200 220 240 260 280 300
Su
rface level (m
)
LSW model
NLSW model
WNB model
measured data
-2.5
-1.5
-0.5
0.5
1.5
2.5
180 200 220 240 260 280 300
Su
rface level (m
)
-4
-3
-2
-1
0
1
2
3
4
5
60 80 100 120 140 160 180
Su
rface level (m
)
time (minutes)
Fig. 6 Comparisons of temporal sea level between measured data
(as published in Grilli et al., 2007) and model simulations at:
(a) Hannimadhoo (b) Male, and (c) Merchator yacht
(a)
(b)
(c)

COASTAL ENGINEERING 2008 1285
APPENDIX
The model equations are written in the following form to make convenient
for applying high order time stepping
[ ]
[ ]
1
1
1
( , , ) ( ) ,
( , , ) ( ) ,
( , , ) ( )
tt
t t
t t
E u v E h
U F u v F v
V G u v G u
η = η +
= η +
= η +
(A-1)
( ) ( ) ( )
( )
3 2
1 2
3 2
1 2
( , , ) ( ) ( ) ( )
( ) ( ) ( )
xx xy xx xyx y x
xy yy xy yyy
E u v Hu Hv a h u v a h hu hv
a h u v a h hu hv
η = − − − + + +
− + + +
(A-2)
( ) ( )2 2
1 2 2( ) x yx y
E h h a h h a h h= − − − (A-3)
2( , , ) ( )
x x y b brF u v g u vu F Fη = − η − − − + (A-4)
1 1 2 2( ) ( )
xy xy xF v h b hv b hv b h = + + (A-5)
2( , , ) ( )
y x y b brG u v g uv v G Gη = − η − − − + (A-6)
1 1 2 2( ) ( )
xy xy yG u h b hu b hu b h = + + (A-7)
2 2
1 2 1 2( ) ; ( )
xx xx yy yyU u b h u b h hu V v b h v b h hv= + + = + + (A-8)
where H h= + η is total water depth. Subscript t denotes partial derivative with
respect to time, while subscript x and y denote spatial derivatives in the x and y
direction, respectively. Variables 1 2 1 2, , ,a a b b are defined as
2 21 1 1 1
1 2 1 22 6 2 2, , , / 0.531a a b b z h= β − = β + = β = β = = −ɶ (A-9)
for WNB model equations and 1 2 1 2
0a a b b= = = = for NLSW or LSW model
equations.
Adam-Bashforth-Moulton scheme are used here as of Wei and Kirby (1995) and
written as
( )1 1 1 2 1 2
, , , , , 1 , 1 , 1 ,1223 16 5 2( ) 3( ) ( )
n n n n n n n nti j i j i j i j i j i j i j i j
+ + − − − −∆Ω = Ω + Φ − Φ + Φ + Φ − Φ + Φ (A-10)
for predictor step and
( )1 1 1 1 2 1
, , , , , , 1 , 1 ,249 19 5 ( ) ( )
n n n n n n n nti j i j i j i j i j i j i j i j
+ + + − − +∆Ω = Ω + Φ + Φ − Φ + Φ + Φ − Φ (A-11)
for corrector step, where ( , , )U VΩ = η , ( , , )E F GΦ = and 1 1 1 1( , , )E F GΦ =
The values of u and v at time level (n+1) could be obtained by solving (A-8)
using double sweep algorithm to solve tridiagonal matrix system.
1286 COASTAL ENGIEERING 2008
REFERENCES
Chen, Q., Kirby, J.T., Dalrymple, R.A., Kennedy, A.B., and Chawla, A. 2000.
Boussinesq modeling of wave transformation, breaking, and runup. II: 2D,
J. Waterway, Port, Coast, and Ocean Engineering, ASCE, 126(1), 48-56.
Grilli, S. T., Ioualalen, M., Asavanant, J., Shi, F., Kirby, J.T., and Watts, P.
(2007). Source Constraints and Model Simulation of the December 26,
2004, Indian Ocean Tsunami. J. Waterway, Port, Coast, and Ocean
Engineering, ASCE, 133(6), 414 – 428.
Horillo, J., Kowalik, Z., and Shigihara, Y. 2006. Wave dispersion study in The
Indian Ocean Tsunami of December 26, 2004, Science of Tsunami Hazards,
25(1), 42-63.
Kennedy, A.B., Chen, Q., Kirby, J.T., and Dalrymple, R.A. 2000. Boussinesq
modeling of wave transformation, breaking, and runup. I: 1D, J. Waterway,
Port, Coast, and Ocean Engineering, ASCE, 126(1), 39-47.
Kowalik, Z. 2003. Basic relations between tsunamis and calculation and their
physics-II, Science of Tsunami Hazards, 21(3), 154-173.
Kowalik, Z., Knight, W., Logan, T., and Whitmore, P. 2005. Numerical
modeling of the global tsunami: Indonesia Tsunami of 26 December 2004,
Science of Tsunami Hazards, 23(1), 40-56.
Lynett, P., and Liu, P.L.-F. 2002. A numerical study of submarine landslide
generated waves and runup, Proc. R. Society London, 458, 2885-2910.
Nwogu, O. 1993. Alternative form of Boussinesq equations for nearshor wave
propagation, J. Waterway, Port, Coast, and Ocean Engineering, ASCE,
119(6), 618-638.
Okada, Y. 1985. Surface deformation due to shear and tensile faults in a half-
space, Bulletin of the Seismological Society of America, 75(4), 1135-1154.
Watts, P., Ioualalen, M., GRilli, S., Shi, F., and Kirby, J.T. 2005. Numerical
simulation of the December 26, 2004 Indian Ocean tsunami using high-
order Boussinesq model, Fifth Int. Symp. WAVES 2005, Madrid Spain, 10pp
Wei, G. and Kirby, J.T. 1995. Time-dependent numerical code for extended
Boussinesq equations, J. Waterway, Port, Coast, and Ocean Engineering,
ASCE, 121(5), 251-261.
Wei, G., Kirby, J. T., Grilli, S. T., and Subramanya, R. 1995. A fully nonlinear
Boussinesq model for surface waves. Part 1. Highly nonlinear unsteady
waves, J. Fluid Mechanic, 294, 71-92.

COASTAL ENGINEERING 2008 1287
KEYWORDS – ICCE 2008
NUMERICAL STUDY OF DISPERSION AND NONLINEARITY EFFECTS
ON TSUNAMI PROPAGATION
Authors: Alwafi Pujiraharjo and Tokuzo Hosoyamada
Abstract number: 1090
Boussinesq equations
Dispersive effect
Indian Ocean Tsunami
Nonlinear
Tsunami generation
Tsunami propagation