Embed Size (px)
Citation preview

Intern. J. of Appl Math and Mech., 1, (2005), 1-32.
NUMERICAL SOLUTION OF OBSTACLE SCATTERING
PROBLEMS
Alexander G. RAMM
Department of Mathematics, Kansas State UniversityManhattan, Kansas 66506-2602, USA, [email protected]
Semion GUTMAN
Department of Mathematics, University of OklahomaNorman, Oklahoma 73019, USA, [email protected]
Abstract. Some novel numerical approaches to solving direct and inverse ob-stacle scattering problems are presented. Scattering by finite obstacles and byperiodic structures is considered. The emphasis for solving direct scattering prob-lem is on the Modified Rayleigh Conjecture method, recently introduced and testedby the authors. This method is used numerically in scattering by finite obstaclesand by periodic structures. Numerical results it produces are very encouraging.The support function method for solving the inverse obstacle scattering problemsis described and tested in some examples. Analysis of the various versions of linearsampling methods is given, and the limitations of these methods are described.
Key words and phrases: obstacle scattering, modified Rayleigh conjecture,numerical solution of obstacle scattering problem, Support Function Method.
1. Introduction
In this paper we review our recent work on Direct and Inverse Obstacle ScatteringProblems (IOSP), which is centered on the Rayleigh Conjecture (RC). These resultsshow that numerical solution of the obstacle scattering problem based on the MRC(Modified Rayleigh Conjecture) method is a competitive alternative to the BIEM(boundary integral equations method). This approach has numerical advantageswhich may be especially important in three-dimensional scattering problems, andnon-smooth domains, for example, in domains whose boundaries contain cornersin 2-D case, and vertices and edges in 3-D case. Recently there was an increasedinterest in scattering by periodic structures. We discuss an adaptation of the MRCmethod to such scattering problems after a short introduction into its theory. Wealso present a novel method (Support Function Method) for the solution of theInverse Obstacle Scattering Problem (IOSP), and compare its performance to theLinear Sampling Method.
We start with the formulation of the obstacle scattering problem. In this paperwe usually consider the 2-D setting, and the Dirichlet boundary condition, but thediscussed methods can also be used for 3-D problems, and the Neumann and Robinboundary conditions as well.
Let an obstacle be a bounded domain D ⊂ R2 with a Lipschitz boundary Γ. Fix
a frequency k > 0 and denote the exterior domain by D′ = R2 \ D.
1991 Mathematics Subject Classification. Primary 78A46, 65N21, Secondary 35R30.
1

2 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
A solution v(x) of the Helmholtz equation
∆v + k2v = 0, x ∈ D′ , (1)
is called outgoing if it satisfies the radiation condition
limr→∞
∫
|x|=r
∣
∣
∣
∣
∂v
∂|x| − ikv
∣
∣
∣
∣
2
ds = 0 . (2)
The Exterior Dirichlet Problem consists of finding an outgoing solution ofthe Helmholtz equation (1) which satisfies the boundary condition
v = f, x ∈ Γ , (3)
where f is a continuous function, see [Ramm 1986] for the existence and uniquenessresults for this problem, and [Ramm 2000], [Gol’dshtein 2001] for such results inthe case of very rough domains. In [Ramm 1995] uniqueness of the solution toIOSP is proved for domains with finite perimeter, and the separability of L2(D)is used in the proof of the uniqueness results in place of the discreteness of thespectrum of Neumann Laplacian, thus showing the applicability of the Schiffer’sbeautiful idea to the IOSP uniqueness proof when the boundary condition is theNeumann one. In [Ramm 1965], [Ramm 1993], [Ramm 1994(4)], [Ramm 1994(2)],[Ramm 1994(3)] and [Ramm 2000] various problems related to IOSP are studied:the dependence of the scattering amplitude on the boundary S of the obstacle, andthe stability of the obstacle towards small perturbation of the scattering amplitude.
A particular case of the above problem is the Direct Acoustic Obstacle Scat-
tering Problem. Let α ∈ S1, and the incident field be
ui(x) = eikx·α . (4)
The problem is to find the total field
u(x, k) = ui + v, x ∈ D′ (5)
such that
u = 0, x ∈ Γ , (6)
and the scattered field v := us satisfies (1)-(2).It is known (see e.g. [Ramm 1986]), that every outgoing solution v(x), x ∈ D′
has an asymptotic representation
v(x) =eik|x|√
|x|
{
A(α′) + O
(
1
|x|
)}
, |x| → ∞ , (7)
where α′ = x/|x|, α′ ∈ S1. The function A(α′) := Av(α′) is called the Far Field
Pattern of u.For the Direct Acoustic Obstacle Scattering Problem this representation takes
the form
v(x) =eik|x|√
|x|
{
A(α′, α) +O
(
1
|x|
)}
, |x| → ∞ , (8)
where the uniquely defined function A(α′, α) is called the Scattering Amplitude ofthe Obstacle Scattering Problem.
Let Jl(t) and Nl(t) be the Bessel and Neumann functions of the integer order
l. The first Hankel function of order l is defined by H(1)l = Jl + iNl. Suppose
that the circle BR = {x ∈ R2 : |x| ≤ R} contains D. Then, in the region

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 3
|x| > R, the outgoing solution of the Exterior Dirichlet Problem (1)-(3) has aunique representation
v(x) =
∞∑
l=−∞
alH(1)l (k|x|)eilθ , (9)
where x/|x| = (cos(θ), sin(θ)).The Rayleigh Conjecture (RC) states that the series (9) converges up to the
boundary Γ. This conjecture is false for many domains, although it holds forsome domains, e.g., for a ball, see [Barantsev 1971], [Millar 1973], [Ramm 1986].Recently A.G. Ramm [Ramm 2002(2)] established a Modified Rayleigh Conjecture(MRC). A numerical implementation of the MRC method for obstacle scatteringproblems is presented in [Gutman 2002].
2. Modified Rayleigh Conjecture (MRC).
A 2-D version of the main result from [Ramm 2002(2)], [Gutman 2002] is
Theorem 2.1. Let (9) be the unique representation of the outgoing solution v(x)of the Exterior Dirichlet Problem (1)-(3). Fix an ε > 0.
Then there exists a positive integer L = L(ε) and the coefficients cl = cl(ε), l =0,±1, . . . ,±L such that
(i).
‖f(x) −L∑
l=−L
clH(1)l (k|x|)eilθ‖L2(Γ) ≤ ε ,
If (i) holds, then:(ii).
‖v(x) −L∑
l=−L
clH(1)l (k|x|)eilθ‖ = O(ε) , ε → 0 ,
where
‖ · ‖ = ‖ · ‖Hmloc
(D′) + ‖ · ‖L2(D′ ;(1+|x|)−γ) ,
γ > 1 , m > 0 is an arbitrary integer, Hm is the Sobolev space, and(iii).
cl(ε) → al , as ε→ 0 , l = 0,±1,±2, . . . .
According to Theorem 2.1 the computation of the outgoing solution of (1)-(3) isreduced to the approximation of the boundary values in (3). A direct implemen-tation of the above algorithm is efficient for domains D not very different from acircle, e.g. for an ellipse with a small eccentricity, but it fails for more complicatedregions. The numerical difficulties happen because the Neumann functions Nl withlarge values of l are bigger than Nl with small values of l by many orders of mag-nitude. A finite precision of numerical computations makes it necessary to keepthe values of L not too high, e.g. L ≤ 20. This restriction can be remedied by thefollowing modification of the above algorithm, see [Gutman 2002]:
Theorem 2.2. Let v(x) be the outgoing solution of the Exterior Dirichlet Problem(1)-(3). Suppose that points x1, x2, . . . , xJ are in the interior of D, and ε > 0.
Then

4 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
(i). There exists a positive integer L = L(ε) and the coefficients clj = clj(ε), l =0,±1, . . . ,±L, j = 1, 2, . . ., J such that
‖f(x) −J∑
j=1
L∑
l=−L
cljH(1)l (k|x− xj|)eilθj‖L2(Γ) ≤ ε , (10)
where (x− xj)/|x− xj| = eiθj .(ii). Let
vε(x) =J∑
j=1
L∑
l=−L
cljH(1)l (k|x− xj|)eilθj , (11)
then
‖v(x) − vε(x)‖ = O(ε) , ε→ 0 ,
where
‖ · ‖ = ‖ · ‖Hmloc(D
′) + ‖ · ‖L2(D′ ;(1+|x|)−γ) ,
γ > 1 , m > 0 is an arbitrary integer, Hm is the Sobolev space(iii). The far field pattern of the approximate solution vε(x) is given by
Avε(α′) =
√
2
πke−i
π4
J∑
j=1
(
e−ikα′·xj
L∑
l=−L
clj (−i)leilθ)
, (12)
where α′ = x/|x| = eiθ.
3. Direct Scattering Problem via MRC.
According to Theorem 2.2 one can approximate the scattered field us of theDirect Obstacle Scattering problem (4)-(6) by minimizing (10) with f(x) = −ui(x),x ∈ Γ. More precisely, the algorithm can be described as follows:
Initialization. Fix an integer L > 0 and an ε > 0. Choose x1, x2, . . . , xJ in theinterior of D. If r(t), 0 ≤ t < 2π is an equation of the boundary Γ, let
ψlj(t) = H(1)l (k|r(t) − xj|)eilθj (t) , j = 1, 2, . . . , J, l = 0,±1,±2, . . .,±L , (13)
g(t) = −ui(r(t))) = −eikr(t)·α , (14)
where (r(t) − xj)/|r(t)− xj| = eiθj(t).Minimization. Minimize
Φ(c) = ‖g(t) −J∑
j=1
L∑
l=−L
cljψlj(t)‖L2(0,2π) , c = {clj} , (15)
for c ∈ CN , N = (2L+ 1)J .If the minimum of Φ in (15) is smaller than the prescribed tolerance ε, then the
scattered field is approximated by vε(x), x ∈ D′, given by (11), and its ScatteringAmplitude A(α′, α) is computed by formula (12).
The numerical implementation of the minimization algorithm begins with thechoice of M knots 0 = t1 < t2 < · · · < tM < 2π, and points xj, j = 1, . . . , Jin the interior of D. Then the values {ψlj(tm)}Mm=1 form N = (2L + 1)J vectors
a(n), n = 1, 2, . . . , N of length M . Let b = {−ui(tm)}Mm=1. Then the minimizationproblem (15) is reduced to the finite dimensional minimization problem
min{‖Ac− b‖, c ∈ CN} , (16)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 5
where A is the matrix containing vectors a(n), n = 1, 2, . . . , N as its columns. Ifother outgoing solutions are used in addition to functions ψlj , the size of matrix Ais increased accordingly.
We use the Singular Value Decomposition (SVD) method (see e.g. [Press 1992])to minimize (16). Small singular values of the matrix A are used to identify and
delete linearly dependent or almost linearly dependent combinations of vectors a(n).This spectral cut-off makes the minimization process stable. The entire algorithmis summarized below. We denote by V H the complex conjugate transpose of amatrix V . Also, by the definition, the inner product in CN complex conjugates itsfirst component.
Iterative MRC. Fix an ε > 0, an integer L > 0, and wmin > 0.Choose M knots 0 = t1 < t2 < · · · < tM < 2π, and points xj, j = 1, . . . , J in
the interior of D.Let N = (2L + 1)J .
(1) Initialization.
(a) Form vectors
a(n) = {ψlj(tm)}Mm=1 , |l| ≤ L , j = 1, 2, . . . , J ,
and the matrix A of size M ×N , whose columns are the vectors a(n).(b) Form vector
b = {−ui(tm)}Mm=1 .
(c) Use Singular Value Decomposition method to represent matrix A as
A = UWV H ,
where the M × N matrix U has orthonormal columns u(n), n =1, . . . , N , the square N × N matrix V has orthonormal columns v(n),n = 1, . . . , N , and the diagonal square N ×N matrix W = (wn)Nn=1 iscomposed of the (nonnegative) singular values of A.
(d) Let Σ ⊂ {1, 2, . . ., N} be defined by
Σ = {n : wn ≥ wmin} .(e) Let p = 0.
(2) Iterative step.
(a) Let p := p+ 1.(b) Form the set
P = {n ∈ Σ : wn is among p largest singular values of A} .(c) Compute the normalized residual
rminp =1√M
√
‖b‖2 −∑
n∈P
|< u(n),b >|2 .
(3) Stopping criterion.
(a) If rminp ≤ ε, then stop.The minimizer is given by
c =∑
n∈P
1
wn< u(n),b > v(n) .

6 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
Compute the scattered field vsε using (11) and the Far Field Patternusing (12).
(b) If rminp > ε, and P 6= Σ repeat the iterative step (2).(c) Otherwise, the procedure has failed.
4. Numerical Experiments for MRC for obstacle scatteringproblems.
The results obtained by the MRC method (for smooth boundary Γ) were com-pared to the results obtained by the Boundary Integral Equation Method (BIEM)presented in [Colton 1992]. Accordingly, to find the outgoing solution v(x) of theExterior Dirichlet Problem (1)-(3) one has to solve the integral equation
ϕ(x) +
∫
Γ
{
∂Φ(x, y)
∂ν(y)− iηΦ(x, y)
}
ϕ(y) ds(y) = 2f(x) , x ∈ D′ (17)
for the density function ϕ ∈ C(Γ). In the above equation Φ := i4H
10 (k|x − y|),
and H10(r) is the Hankel function. Following the recommendations in [Colton 1992]
the value for the real coupling parameter η was chosen to be equal to the wavenumber k. The above integral equation was solved using the Nystrom method, see[Colton 1992], Section 3.5.
After the density ϕ is computed, the Far Field Pattern can be obtained from
Av(α′) =
e−iπ4
√8πk
∫
Γ
{kν(y) · α′ + η}e−ikα′·yϕ(y) ds(y) , (18)
where ν is the exterior unit normal vector to the boundary Γ.We conducted numerical experiments for four obstacles: two ellipses of different
eccentricity, a kite, and a triangle. Each case was tested for wave numbers k = 1.0and k = 5.0. Each obstacle was subjected to incident waves corresponding to α =(1.0, 0.0) and α = (0.0, 1.0). The results are shown in Table 1. The column J showsthe number of the interior points xj used in the approximation (15). The choiceof the points xj was different in each experiment. It is indicated below togetherwith the description of the experiments. The column rmin shows the smallest valueof the normalized residual achieved by the MRC minimization method in step 2.cof the Iterative MRC algorithm described in the previous section. Values L = 5and M = 720 were used in all the experiments. The 720 knots tm were uniformlydistributed on [0, 2π]. Under these conditions the relative error between the MRCand BIEM (implemented as described in the beginning of this section with n = 64(see [Colton 1992]) approximations of the scattering amplitude was less then 0.01%.See [Gutman 2002] for details.
Experiment I. The boundary Γ is an ellipse described by
r(t) = (2.0 cos t, sin t), 0 ≤ t < 2π . (19)
The MRC minimization used 4 interior points xj = 0.7r(π(j−1)2
), j = 1, . . . , 4. Runtime for the MRC was 2 seconds vs. 25 seconds for the BIEM on a 333 MHz PC.
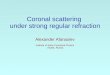
Experiment II. The kite-shaped boundary Γ (see [Colton 1992], Section 3.5)is described by
r(t) = (−0.65 + cos t+ 0.65 cos 2t, 1.5 sin t), 0 ≤ t < 2π , (20)
see Figure 1. The MRC minimization used 16 interior points xj = 0.9r(π(j−1)8 ), j =
1, . . . , 16. Run time for the MRC was 33 seconds vs. 44 seconds for the BIEM.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 7
Table 1. Normalized residuals attained in the numerical experiments.
Experiment J k α rmin
I 4 1.0 (1.0, 0.0) 0.0002014 1.0 (0.0, 1.0) 0.0003574 5.0 (1.0, 0.0) 0.0013094 5.0 (0.0, 1.0) 0.007228
II 16 1.0 (1.0, 0.0) 0.00355516 1.0 (0.0, 1.0) 0.00216916 5.0 (1.0, 0.0) 0.00967316 5.0 (0.0, 1.0) 0.007291
III 16 1.0 (1.0, 0.0) 0.00828116 1.0 (0.0, 1.0) 0.00752316 5.0 (1.0, 0.0) 0.02157116 5.0 (0.0, 1.0) 0.024360
IV 32 1.0 (1.0, 0.0) 0.00661032 1.0 (0.0, 1.0) 0.00678532 5.0 (1.0, 0.0) 0.03402732 5.0 (0.0, 1.0) 0.040129
Experiment III. The boundary Γ is the triangle with vertices at (−1.0, 0.0) and
(1.0,±1.0). The MRC minimization used 16 interior points xj = 0.9r(π(j−1)8 ), j =
1, . . . , 16. Run time for the MRC was about 30 seconds. See Figure 2 for thescattering amplitude A(α′, α) for α = (0.0, 1.0), k = 5.0 obtained by the MRCmethod with these parameters.
Experiment IV. The boundary Γ is an ellipse described by
r(t) = (0.1 cos t, sin t), 0 ≤ t < 2π . (21)
The MRC minimization used 32 interior points xj = 0.95r(π(j−1)16 ), j = 1, . . . , 32.
Run time for the MRC was about 140 seconds.
5. Scattering by periodic structures.
Determination of fields scattered by periodic structures is of a great importancein modern diffractive optics, and there is a vast literature on both the direct andinverse problems of this type, see, for example [Petit 1980]. Still, an efficient com-putation of such fields presents certain difficulties. In the next Sections we presentsome theoretical background, a modification of the MRC method, and numericalresults for such a scattering, see [Ramm A.G., Gutman S., preprint].
For simplicity we consider a 2-D setting, but our arguments can be as easilyapplied to n-dimensional problems, n ≥ 2. Let f : R → R, f(x + L) = f(x) be anL-periodic Lipschitz continuous function, and let D be the domain
D = {(x, y) : y ≥ f(x), x ∈ R}.Without loss of generality we assume that f ≥ 0. If it is not, one can choose the
origin so that this assumption is satisfied, because M := sup0≤x≤L |f(x)| < ∞.Let x = (x, y) and u(x) be the total field satisfying
(∆ + k2)u = 0, x ∈ D, k = const > 0 (22)

8 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5
Figure 1. The kite-shaped obstacle used in Experiment II.
u = 0 on S : = ∂D, (23)
u = u0 + v, u0 : = eikα·x, (24)
where the unit vector α = (cos θ,− sin θ), 0 < θ < π/2, and v(x) is the scatteredfield, whose asymptotic behavior as y → ∞ will be specified below, and
u(x+ L, y) = νu(x, y), ux(x+ L, y) = νux(x, y) in D, ν : = eikL cos θ . (25)
Conditions (25) are the qp (quasiperiodicity) conditions. To find the properradiation condition for the scattered field v(x) consider the spectral problem
ϕ′′ + λ2ϕ = 0, 0 < x < L, (26)
ϕ(L) = νϕ(0), ϕ′(L) = νϕ′(0) (27)
arising from the separation of variables in (22)-(25). This problem has a discretespectrum, and its eigenfunctions form a basis in L2(0, L). One has
ϕ = Aeiλx + Be−iλx, A,B = const,
AeiλL +Be−iλL = ν(A+ B), iλAeiλL − iλBe−iλL = iλν(A −B).
Thus∣
∣
∣
∣
eiλL − ν e−iλL − νiλ(eiλL − ν) −iλ(e−iλL − ν)
∣
∣
∣
∣
= 0.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 9
So, iλ(eiλL−ν)(e−iλL−ν) = 0. If λ = 0, then ϕ = A+Bx, A+BL = νA, B = νB.Since ν = eikL cos θ, one has no eigenvalue λ = 0 unless kL sin θ = 2πm, m > 0 isan integer. Let us assume that kL cos θ 6= 2πm. Then
eiλL = eikL cos θ or e−iλL = eikL cos θ ,
that is
λ+j = k cos θ +
2πj
L, or λ−j = −k cos θ +
2πj
L, j = 0,±1,±2, . . .
The corresponding eigenfunctions are eiλ+
j x and e−iλ−j x. We will use the system
eiλ+
j x, which forms an orthogonal bais in L2(0, L). One has:∫ L
0
eiλ+
j xe−iλ+mx dx =
∫ L
0
e2πiL (j−m) dx = 0, j 6= m.
The normalized eigenfunctions are
ϕj(x) =eiλ
+
j x
√L, j = 0,±1,±2, . . .
These functions form an orthonormal basis of L2(0, L). Let us look for v(x) =v(x, y) of the form
v(x, y) =
∞∑
j=−∞
cjvj(y)ϕj(x), y > M, cj = const. (28)
For y > M , equation (22) implies
v′′j + (k2 − λ2j )vj = 0. (29)
Let us assume that λ2j 6= k2 for all j. Then
vj(y) = eiµjy, (30)
where, for finitely many j, the set of which is denoted by J , one has:
µj = (k2 − λ2j)
1/2 > 0, if λ2j < k2, j ∈ J, (31)
and
µj = i(λ2j − k2)1/2, if λ2
j > k2, j /∈ J. (32)
The radiation condition at infinity requires that the scattered field v(x, y) berepresentable in the form (28) with vj(y) defined by (30)-(32).
The Periodic Scattering Problem consists of finding the solution to (22)-(25)satisfying the radiation condition (28), (30)-(32).
The existence and uniqueness for such a scattering problem is established in[Ramm A.G., Gutman S., preprint]. In [Alber 1978] the scattering by a peri-odic structure was considered earlier, and was based on a uniqueness theoremfrom [Eidus 1963]. There are many papers on scattering by periodic structures,of which we mention a few [Alber 1978, Albertsen 1999, Bonnet-Bendhia 1994,Bonnet-Bendhia 2002, Christiansen 1996, Kazandjian 1992, Kazandjian 1995],[Millar 1973, Millar 1971, Petit 1980, Rayleigh 1907]. The Rayleigh conjecture isdiscussed in several of the above papers. It was shown (see e.g. [Petit 1980,Barantsev 1971]) that this conjecture is incorrect, in general. As we have alreadydiscussed in the previous sections, the modified Rayleigh conjecture is a theoremproved in [Ramm 2002(2)] for scattering by bounded obstacles.

10 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
Here we present an outline of one of the existence and uniqueness proofs for scat-tering by periodic structures following [Ramm A.G., Gutman S., preprint]. To provethe existence and uniqueness of the resolvent kernel G we start by constructing ascattering theory quite similar to the one for the exterior of a bounded obstacle[Ramm 1986]. The first step is to construct an analog to the half-space Dirich-let Green’s function. The function g = g(x, ξ, k) can be constructed analytically(x = (x1, x2), ξ = (ξ1, ξ2)):
g(x, ξ) =∑
j
ϕj(x1)ϕj(ξ1)gj(x2, ξ2, k), (33)
gj := gj(x2, ξ2, k) =
{
vj(x2)ψj(ξ2), x2 > ξ2
vj(ξ2)ψj(x2), x2 < ξ2
ψj = (µj)−1eiµjb sin[µj(ξ2 + b)], µj = [k2 − λ2
j ]1/2, vj(x2) = eiµjx2 ,
where
ψ′′j + (k2 − λ2
j )ψj = 0, ψj(−b) = 0, W [vj, ψj] = 1, λj = k cos(θ) +2πj
L,
and W [v, ψ] is the Wronskian.The function g is analytic with respect to k on the complex plain with cuts along
the rays λj − iτ, 0 ≤ τ < ∞, j = 0,±1,±2, .., in particular, in the region =k > 0,up to the real positive half-axis except for the set {λj}j=0,±1,±2,....
Choose b > 0 such that k2 > 0 is not an eigenvalue of the problem:
(∆ + k2)ψ = 0, in D−b : = {(x, y) : −b ≤ y ≤ f(x), 0 ≤ x ≤ L}. (34)
ψ|y=−b = 0, ψN = 0 on S,
ψ(x+ L, y) = νψ(x, y), ψx(x+ L, y) = νψx(x, y).(35)
One has
(∆ + k2)g = −δ(x − ξ), x = (x1, x2), ξ = (ξ1, ξ2),
x ∈ {(x, y) : −b < y < ∞, 0 ≤ x ≤ L}, (36)
g|y=−b = 0, (37)
and
(∆ + k2)G = −δ(x − ξ), G = 0 on S, (38)
G satisfies the qp condition and the radiation condition ( it is outgoing at infinity).Multiply (36) by G, (38) by g, subtract from the second equation the first one,
integrate over DLR, and take R → ∞, to get
G = g +
∫
SL
(GgN −GNg)ds = g −∫
SL
gµ ds, µ : = GN |SL . (39)
The qp condition allows one to cancel the integrals over the lateral boundary (x = 0and x = L), and the radiation condition allows one to have
limR→∞
∫
SR
(GgN − GNg)ds = 0.
Differentiate (39) to get
µ = −Aµ + 2∂g
∂Non SL, Aµ : = 2
∫
SL
∂g(s, σ)
∂Nsµ(σ) dσ. (40)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 11
This is a Fredholm equation for µ in L2(SL), if SL is C1,m, m > 0. The homoge-neous equation (40) has only the trivial solution: if µ+ Aµ = 0, then the functionψ : =
∫
SLgµ ds satisfies ψ+
N |SL = 0, where ψ+N (ψ−
N ) is the normal derivative of
ψ from D−b(DL), and we use the known formula for the normal derivative of thesingle layer potential at the boundary. The ψ satisfies also (34) and (35), and, bythe choice of b, one has ψ = 0 in D−b. Also ψ = 0 in DL, because (∆ + k2)ψ = 0in DL, ψ|SL = 0 (by the continuity of the single layer potential), ψ satisfies the qpcondition (because g satisfies it), and ψ is outgoing (because g is).
Since ψ = 0 in D−b and in DL, one concludes that µ = ψ+N −ψ−
N , where ψ+N (ψ−
N )is the normal derivative of ψ from D−b(DL), and we use the jump relation for thenormal derivative of the single layer potential.
Thus, we have proved the existence and uniqueness of µ, and, therefore, of G,and got a representation formula
G = g −∫
SL
gµ ds. (41)
6. MRC for scattering by periodic structures.
Rayleigh conjectured [Rayleigh 1907] (”Rayleigh hypothesis”) that the series (28)converges up to the boundary SL. This conjecture is wrong ([Petit 1980]) for somef(x). Since the Rayleigh hypothesis has been widely used for numerical solution ofthe scattering problem by physicists and engineers, and because these practitionersreported high instability of the numerical solution, and there are no error estimates,we propose a modification of the Rayleigh conjecture, which is a Theorem. ThisMRC (Modified Rayleigh Conjecture) can be used for a numerical solution of thescattering problem, and it gives an error estimate for this solution. Our argumentsare very similar to the ones in [Ramm 2002(2)].
Rewrite the scattering problem (22)-(25) as
(∆ + k2)v = 0 in D, v = −u0 on SL, (42)
where v satisfies (25), and v has representation (28), that is, v is ”outgoing”, itsatisfies the radiation condition. Fix an arbitrarily small ε > 0, and assume that
‖u0 +∑
|j|≤j(ε)
cj(ε)vj(y)ϕj (x)‖ ≤ ε, 0 ≤ x ≤ L, y = f(x), (43)
where ‖ · ‖ = ‖ · ‖L2(SL).
Lemma 6.1. For any ε > 0, however small, and for any u0 ∈ L2(SL), there existsj(ε) and cj(ε) such that (43) holds.
Proof. Let us prove the completeness of the system {ϕj(x)vj(f(x))}j=0,±1,±2,... inL2(SL). Assume that there is an h ∈ L2(SL), h 6≡ 0 such that
∫
SL
hϕj(x)vj(f(x)) ds = 0 (44)
for any j. From (44) one derives (cf. [Ramm 1986], p.162-163)
ψ(x) : =
∫
SL
hg(x, ξ)dξ = 0, x ∈ D−b. (45)
Thus ψ = 0 in DL, and h = ψ+N − ψ−
N = 0. Lemma 6.1 is proved. �

12 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
Lemma 6.2. If (43) holds, then
‖|v(x) −∑
|j|≤j(ε)
cj(ε)vj(y)ϕj (x)‖| ≤ cε, ∀x, y ∈ DL, 0 ≤ x ≤ L, y = f(x),
where c = const > 0 does not depend on ε, x, y; R > M is an arbitrary fixed number,and ‖|w‖| = supx∈D\DLR
|w(x)| + ||w||H1/2(DLR).
Proof. Let w : = v −∑|j|≤j(ε) cj(ε)vj(y)ϕj (x). Then w solves equation (22), w
satisfies (25), w is outgoing, and ‖w‖L2(SL) ≤ ε. One has
w(x) = −∫
SL
wGN (x, ξ) ds. (46)
Thus (43), i.e. ‖w‖ : = ‖w‖L2(SL) ≤ ε, implies
|w(x)|y=R ≤ ‖w‖L2(SL)‖GN(x, ξ)‖L2(SL) ≤ cε, c = const > 0, (47)
where c is independent of ε, and R > max f(x) is arbitrary. Now let us use theelliptic inequality
‖w‖Hm(DLR) ≤ c(
‖w‖Hm−0.5(SL) + ‖w‖Hm−0.5(SR)
)
, (48)
where we have used the equation ∆w + k2w = 0, and assumed that k2 is nota Dirichlet eigenvalue of the Laplacian in DLR, which can be done without lossof generality, because one can vary R. The integer m ≥ 0 is arbitrary if SL issufficiently smooth, and m ≤ 1 if SL is Lipschitz. Taking m = 0.5 and using (43)and (47) one gets
‖w‖H1/2(DLR) ≤ cε. (49)
Thus, in a neighborhood of SL, we have proved estimate (49), and in a complementof this neighborhood inDL we have proved estimate (47). Lemma 6.2 is proved. �
Remark 6.3. In (48) there are no terms with boundary norms over the lateralboundary (lines x = 0 and x = L) because of the quasiperiodicity condition.
From Lemma 6.2 the basic result, Theorem 6.4, follows immediately:
Theorem 6.4. MRC-Modified Rayleigh Conjecture. Fix ε > 0, howeversmall, and choose a positive integer p. Find
mincj
‖u0 +∑
|j|≤p
cjϕj(x)vj(y)‖ : = m(p). (50)
Let {cj(p)} be the minimizer of (50). If m(p) ≤ ε, then
v(p) =∑
|j|≤p
cj(p)ϕj(x)vj(y) (51)
satisfies the inequality
‖|v − v(p)‖| ≤ cε, (52)
where c = const > 0 does not depend on ε. If m(p) > ε, then there exists j = j(ε) >p such that m(j(ε)) < ε. Denote cj(j(ε)) : = cj(ε) and v(j(ε)) : = vε. Then
‖|v − vε‖| ≤ cε. (53)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 13
7. Numerical solution of the periodic scattering problem
According to the MRC method (Theorem 6.4), if the restriction of the incidentfield −u0(x, y) to SL is approximated as in (50), then the series (51) approximatesthe scattered field in the entire region above the profile y = f(x). However, a nu-merical method that uses (50) does not produce satisfactory results as reported in[Petit 1980] and elsewhere. Our own numerical experiments confirm this observa-tion. A way to overcome this difficulty is to realize that the numerical approxima-tion of the field −u0|SL can be carried out by using outgoing solutions describedbelow.
Let ξ = (ξ1, ξ2) ∈ D−b, where b > 0,
D−b : = {(ξ1, ξ2) : −b ≤ ξ2 ≤ f(x), 0 ≤ ξ1 ≤ L},and g(x, ξ) be defined as in Section 5. Then g(x, ξ) is an outgoing solution satisfying∆g + k2g = 0 in DL, according to (36).
To implement the MRC method numerically one proceeds as follows:
(1) Choose the nodes xi, i = 1, 2, ..., N on the profile SL. These points areused to approximate L2 norms on SL.
(2) Choose points ξ(1), ξ(2), ..., ξ(M) in D−b, M < N .
(3) Form the vectors b = (u0(xi)), and a(m) = (g(xi, ξ(m))), i = 1, 2, ..., N ,
m = 1, 2, ...,M . Let A be the N ×M matrix containing vectors a(m) as itscolumns.
(4) Find the Singular Value Decomposition of A . Use a predetermined wmin >0 to eliminate its small singular values. Use the decomposition to compute
rmin = min{‖b + Ac‖, c ∈ CM},
where
‖a‖2 =1
N
N∑
i=1
|ai|2.
(5) Stopping criterion. Let ε > 0.(a) If rmin ≤ ε, then stop. Use the coefficients c = {c1, c2, ..., cM} obtained
in the above minimization step to compute the scattered field by
v(x, y) =
M∑
m=1
cmg(x, y, ξ(m)).
(b) If rmin > ε, then increase N,M by the order of 2, readjust the locationof points ξ(m) ∈ D−b as needed, and repeat the procedure.
We have conducted numerical experiments for four different profiles. In eachcase we used L = π, k = 1.0 and three values for the angle θ. Table 2 showsthe resulting residuals rmin. Note that ‖b‖ = 1. Thus, in all the consideredcases, the MRC method achieved 0.04% to 2% accuracy of the approximation.Other parameters used in the experiments were chosen as follows: N = 256, M =64, wmin = 10−8, b = 1.2. The value of b > 0, used in the definition of g, waschosen experimentally, but the dependency of rmin on b was slight. The SingularValue Decomposition (SVD) is used in Step 4 since the vectors a(m), m = 1, 2, ...,Mmay be nearly linearly dependent, which leads to an instability in the determinationof the minimizer c. According to the SVD method this instability is eliminated bycutting off small singular values of the matrix A, see e.g. [Press 1992] for details.

14 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
Table 2. Residuals attained in the numerical experiments.
Profile θ rmin
I π/4 0.000424π/3 0.000407π/2 0.000371
II π/4 0.001491π/3 0.001815π/2 0.002089
III π/4 0.009623π/3 0.011903π/2 0.013828
IV π/4 0.014398π/3 0.017648π/2 0.020451
The cut-off value wmin > 0 was chosen experimentally. We used the truncatedseries (33) with |j| ≤ 120 to compute functions g(x, y, ξ). A typical run time on a333 MHz PC was about 40s for each experiment.
The following is a description of the profiles y = f(x), the nodes xi ∈ SL, and
the poles ξ(m) ∈ D−b used in the computation of g(xi, ξ(m)) in Step 3. For example,
in profile I the x-coordinates of the N nodes xi ∈ SL are uniformly distributed onthe interval 0 ≤ x ≤ L. The poles ξ(m) ∈ D−b were chosen as follows: every fourthnode xi was moved by a fixed amount −0.1 parallel to the y axis, so it would bewithin the region D−b. The location of the poles was chosen experimentally to givethe smallest value of the residual rmin.
Profile I. f(x) = sin(2x) for 0 ≤ x ≤ L, ti = iL/N, xi = (ti, f(ti)), i =
1, 2, ...,N, ξ(m) = (x4m, y4m − 0.1), m = 1, 2, ...,M .Profile II. f(x) = sin(0.2x) for 0 ≤ x ≤ L, ti = iL/N, xi = (ti, f(ti)), i =
1, 2, ...,N, ξ(m) = (x4m, y4m − 0.1), m = 1, 2, ...,M .Profile III. f(x) = x for 0 ≤ x ≤ L/2, f(x) = L − x for L/2 ≤ x ≤ L, ti =
iL/N, xi = (ti, f(ti)), i = 1, 2, ..., N, ξ(m) = (x4m, y4m − 0.1), m = 1, 2, ...,M .Profile IV. f(x) = x for 0 ≤ x ≤ L, ti = 2iL/N, xi = (ti, f(ti), i =
1, ..., N/2, xi = (L, f(2(i−N/2)L/N )), i = N/2+1, ..., N, ξ(m) = (x4m−0.03, y4m−0.05), m = 1, 2, ...,M . In this profile N/2 nodes xi are uniformly distributed on itsslant part, and N/2 nodes are uniformly distributed on its vertical portion x = L.
The experiments show that the MRC method provides a competitive alternativeto other methods for the computation of fields scattered from periodic structures.It is fast and inexpensive. The results depend on the number of the internal pointsξ(m) and on their location. A similar MRC method for the computation of fieldsscattered by a bounded obstacle was presented in [Gutman 2002].
8. The Support Function Method (SFM).
The Inverse Scattering Problem consists of finding the obstacle D from the Scat-tering Amplitude, or similarly observed data. The Support Function Method (SFM)originally developed in a 3-D setting in [Ramm 1986], pp 94-99, is used to approx-imately locate the obstacle D. The method is derived using a high-frequency ap-proximation to the scattered field for smooth, strictly convex obstacles. It turns

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 15
out that this inexpensive method also provides a good localization of obstacles inthe resonance region of frequencies. One can restate the SFM in a 2-D setting asfollows (see [Gutman 2003]).
Let D ⊂ R2 be a smooth and strictly convex obstacle with the boundary Γ. Let
ν(y) be the unique outward unit normal vector to Γ at y ∈ Γ. Fix an incidentdirection α ∈ S1. Then the boundary Γ can be decomposed into the following twoparts:
Γ+ = {y ∈ Γ : ν(y) ·α < 0} , and Γ− = {y ∈ Γ : ν(y) ·α ≥ 0} , (54)
which are, correspondingly, the illuminated and the shadowed parts of the boundaryfor the chosen incident direction α.
Given α ∈ S1, its specular point s0(α) ∈ Γ+ is defined from the condition:
s0(α) · α = mins∈Γ+
s ·α (55)
Note that the equation of the tangent line to Γ+ at s0 is
< x1, x2 > · α = s0(α) · α , (56)
and
ν(s0(α)) = −α . (57)
The Support function d(α) is defined by
d(α) = s0(α) · α . (58)
Thus |d(α)| is the distance from the origin to the unique tangent line to Γ+
perpendicular to the incident vector α. Since the obstacle D is assumed to beconvex
D = ∩α∈S1{x ∈ R2 : x · α ≥ d(α)} . (59)
The boundary Γ of D is smooth, hence so is the Support Function. The knowl-edge of this function allows one to reconstruct the boundary Γ using the followingprocedure.
Parametrize unit vectors l ∈ S1 by l(t) = (cos t, sin t), 0 ≤ t < 2π and define
p(t) = d(l(t)), 0 ≤ t < 2π . (60)
Equation (56) and the definition of the Support Function give
x1 cos t+ x2 sin t = p(t) . (61)
Since Γ is the envelope of its tangent lines, its equation can be found from (61) and
−x1 sin t+ x2 cos t = p′(t) . (62)
Therefore the parametric equations of the boundary Γ are
x1(t) = p(t) cos t − p′(t) sin t, x2(t) = p(t) sin t+ p′(t) cos t . (63)
So, the question is how to construct the Support function d(l), l ∈ S1 from theknowledge of the Scattering Amplitude. In 2-D the Scattering Amplitude is relatedto the total field u = u0 + v by
A(α′, α) = − eiπ4
√8πk
∫
Γ
∂u
∂ν(y)e−ikα
′·y ds(y) . (64)

16 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
In the case of the ”soft” (i.e. the pressure field satisfies the Dirichlet boundarycondition u = 0) the Kirchhoff (high frequency) approximation gives
∂u
∂ν= 2
∂u0
∂ν(65)
on the illuminated part Γ+ of the boundary Γ, and
∂u
∂ν= 0 (66)
on the shadowed part Γ−. Therefore, in this approximation,
A(α′, α) = − ikeiπ4
√2πk
∫
Γ+
α · ν(y) eik(α−α′)·y ds(y) . (67)
Let L be the length of Γ+, and y = y(ζ), 0 ≤ ζ ≤ L be its arc lengthparametrization. Then
A(α′, α) = − i√k ei
π4
√2π
∫ L
0
α · ν(y(ζ)) eik(α−α′)·y(ζ) dζ . (68)
Let ζ0 ∈ [0, L] be such that s0 = y(ζ0) is the specular point of the unit vector l,where
l =α− α′
|α− α′| . (69)
Then ν(s0) = −l, and d(l) = y(ζ0) · l. Let
ϕ(ζ) = (α− α′) · y(ζ) .
Then ϕ(ζ) = l · y(ζ)|α− α′|. Since ν(s0) and y′(ζ0) are orthogonal, one has
ϕ′(ζ0) = l · y′(ζ0)|α− α′| = 0 .
Therefore, due to the strict convexity of D, ζ0 is also the unique non–degeneratestationary point of ϕ(ζ) on the interval [0, L], that is ϕ′(ζ0) = 0, and ϕ′′(ζ0) 6= 0.
According to the Stationary Phase method∫ L
0
f(ζ)eikϕ(ζ)dζ = f(ζ0) exp
[
ikϕ(ζ0) +iπ
4
ϕ′′(ζ0)
|ϕ′′(ζ0)|
]
√
2π
k|ϕ′′(ζ0)|
[
1 +O
(
1
k
)]
, (70)
as k → ∞.By the definition of the curvature κ(ζ0) = |y′′(ζ0)|. Therefore, from the collinear-
ity of y′′(ζ0) and l, |ϕ′′(ζ0)| = |α−α′|κ(ζ0). Finally, the strict convexity of D, andthe definition of ϕ(ζ), imply that ζ0 is the unique point of minimum of ϕ on [0, L],and
ϕ′′(ζ0)
|ϕ′′(ζ0)|= 1 . (71)
Using (70)-(71), expression (68) becomes:
A(α′, α) = − l ·α√
|α− α′|κ(ζ0)eik(α−α
′)·y(ζ0)
[
1 +O
(
1
k
)]
, k → ∞ . (72)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 17
At the specular point one has l ·α′ = −l ·α. By the definition α−α′ = l|α−α′|.Hence l ·(α−α′) = |α−α′| and 2l ·α = |α−α′|. These equalities and d(l) = y(ζ0) · lgive
A(α′, α) = −1
2
√
|α− α′|κ(ζ0)
eik|α−α′|d(l)
[
1 +O
(
1
k
)]
, k → ∞ . (73)
Thus, the approximation
A(α′, α) ≈ −1
2
√
|α− α′|κ(ζ0)
eik|α−α′|d(l) (74)
can be used for an approximate recovery of the curvature and the support function(modulo 2π/k|α − α′|) of the obstacle, provided one knows that the total fieldsatisfies the Dirichlet boundary condition. The uncertainty in the support functiondetermination can be remedied by using different combinations of vectors α and α′
as described in the numerical results section.
9. The Support Function Method for Neumann and Robin boundaryconditions.
Since it is also of interest to localize the obstacle in the case when the boundarycondition is not a priori known, one can modify the SFM as follows.
For the Robin boundary conditions
A(α′, α) =ei
π4
√8πk
∫
Γ
{
u(y)∂e−ikα
′·y
∂N (y)+ hu(y)e−ikα
′·y
}
ds(y) , (75)
and on Γ+
u(x) =
(
1 +ikN (x) · α+ h
ikN (x) · α− h
)
eikx·α .
In Kirchhoff approximation one lets u = 0, uN = 0 on Γ−. Thus
A(α′, α) =ei
π4
√8πk
∫
Γ+
(
1 +ikN (y) · α+ h
ikN (y) · α− h
)
(−ikN (y) · α′ + h)eik(α−α′)·y ds(y)
=2ikei
π4
√8πk
∫
Γ+
(−ikN (y) · α′ + h
ikN (y) · α− h
)
N (y) ·α eik(α−α′)·y ds(y) (76)
Now the Stationary Phase method applied to (76) gives
A(α′, α) =1
2
√
|α− α′|κ(ζ0)
eik|α−α′|d(l)
[
1 + O
(
1
k
)]
, (77)
as k → ∞. Here κ is the curvature of the boundary at the specular point.Since in the resonance region the frequency k is not large, one can argue that,
under the assumption of a small curvature κ, the function
y → −ikN (y) ·α′ + h
ikN (y) · α− h
is a slowly changing one, and it can be approximated by the constant
C =−ikN (s0) · α′ + h
ikN (s0) ·α− h=ikN (s0) · α+ h
ikN (s0) · α− h=
−ikl · α+ h
−ikl · α− h

18 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
This is equivalent to replacing the total field u(x) on Γ+ by
u(x) =
(
1 +ikN (s0) · α+ h
ikN (s0) · α− h
)
eikx·α
Therefore
A(α′, α) =2ikCei
π4
√8πk
∫
Γ+
N (y) · α eik(α−α′)·y ds(y) (78)
Now the approximation by the Stationary Phase method gives
A(α′, α) ∼ C
2
√
|α− α′|κ(ζ0)
eik(α−α′)·y(ζ0) (79)
Since
C =ik|α− α′| − 2h
ik|α− α′| + 2h= ei(π−2γ)
where
γ = arctank|α− α′|
2hit follows that
A(α′, α) ∼ 1
2
√
|α− α′|κ(ζ0)
ei(k|α−α′|d(l)−2γ+π)
Let l ∈ S1 be fixed. Let
R(l) = {α ∈ S1 : |α · l| > 1/√
2} .Therefore
√2 < |α− α′| ≤ 2. In this range we approximate γ by
γ0 = arctank
hand get
A(α′, α) ∼ 1
2
√
|α− α′|κ(ζ0)
ei(k|α−α′|d(l)−2γ0+π) (80)
Now one can recover the Support Function d(l) from (80), and the location of theobstacle.
10. Numerical results for the Support Function Method.
In the first numerical experiment the obstacle is the circle
D = {(x1, x2) ∈ R2 : (x1 − 6)2 + (x2 − 2)2 = 1} . (81)
It is reconstructed using the Support Function Method for two frequencies in theresonance region: k = 1.0, and k = 5.0. Table 3 shows how well the approximation(74) is satisfied for various pairs of vectors α and α′ all representing the same vectorl = (1.0, 0.0) according to (69). The Table shows the ratios of the approximateScattering Amplitude Aa(α
′, α) defined as the right hand side of the equation (74)to the exact Scattering Amplitude A(α′, α). Note, that for a sphere of radius a,centered at x0 ∈ R
2, one has
A(α′, α) = −√
2
πke−i
π4 eik(α−α
′)·x0
∞∑
l=−∞
Jl(ka)
H(1)l (ka)
eil(θ−β) , (82)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 19
where α′ = x/|x| = eiθ, and α = eiβ . Vectors α and α′ are defined by their polarangles shown in Table 3.
Table 3. Ratios of the approximate and the exact Scattering Am-plitudes Aa(α
′, α)/A(α′, α) for l = (1.0, 0.0).
α′ α k = 1.0 k = 5.0
π 0 0.88473 - 0.17487i 0.98859 - 0.05846i
23π/24 π/24 0.88272 - 0.17696i 0.98739 - 0.06006i
22π/24 2π/24 0.87602 - 0.18422i 0.98446 - 0.06459i
21π/24 3π/24 0.86182 - 0.19927i 0.97977 - 0.07432i
20π/24 4π/24 0.83290 - 0.22411i 0.96701 - 0.08873i
19π/24 5π/24 0.77723 - 0.25410i 0.95311 - 0.10321i
18π/24 6π/24 0.68675 - 0.27130i 0.92330 - 0.14195i
17π/24 7π/24 0.57311 - 0.25360i 0.86457 - 0.14959i
16π/24 8π/24 0.46201 - 0.19894i 0.81794 - 0.22900i
15π/24 9π/24 0.36677 - 0.12600i 0.61444 - 0.19014i
14π/24 10π/24 0.28169 - 0.05449i 0.57681 - 0.31075i
13π/24 11π/24 0.19019 + 0.00075i 0.14989 - 0.09479i
12π/24 12π/24 0.00000 + 0.00000i 0.00000 + 0.00000i
Table 3 shows that only vectors α close to the vector l are suitable for theScattering Amplitude approximation. This shows the practical importance of thebackscattering data. As mentioned at the end of Section 8, any single combinationof vectors α and α′ representing l is not sufficient to uniquely determine the SupportFunction d(l) from (74) because of the phase uncertainty. However, one can remedythis by using more than one pair of vectors α and α′ as follows.
Let l ∈ S1 be fixed. Let
R(l) = {α ∈ S1 : |α · l| > 1/√
2} .Define Ψ : R → R
+ by
Ψ(t) =
∥
∥
∥
∥
A(α′, α)
|A(α′, α)| + eik|α−α′|t
∥
∥
∥
∥
2
L2(R(l))
,
where α′ = α′(α) is defined by l and α according to (69), and the integration isdone over α ∈ R(l).
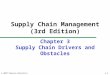
If the approximation (74) were exact for any α ∈ R(l), then the value of Ψ(d(l))would be zero. This justifies the use of the minimizer t0 ∈ R of the function Ψ(t)as an approximate value of the Support Function d(l). If the Support Function isknown for sufficiently many directions l ∈ S1, the obstacle can be localized using(59) or (63). The results of such a localization for k = 1.0 together with the originalobstacle D is shown on Figure 2. For k = 5.0 the identified obstacle is not shown,since it is practically the same as D. The only a priori assumption on D was that itwas located inside the circle of radius 20 with the center in the origin. The SupportFunction was computed for 16 uniformly distributed in S1 vectors l. The programrun takes about 80 seconds on a 333 MHz PC.

20 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
2 4 6 8x
2
4
6y
Figure 2. Identified (dotted line), and the original (solid line)obstacle D for k = 1.0.
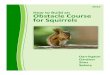
In another numerical experiment we used k = 1.0 and a kite-shaped obstacle.Its boundary is described by
r(t) = (5.35 + cos t + 0.65 cos 2t, 2.0 + 1.5 sin t), 0 ≤ t < 2π . (83)
Numerical experiments using the boundary integral equation method (BIEM) forthe direct scattering problem for this obstacle centered in the origin are described in[Colton 1992], section 3.5. Again, the Dirichlet boundary conditions were assumed.We computed the scattering amplitude for 120 directions α using the MRC method(see the section 3) with about 25% performance improvement over the BIEM, see[Gutman 2002].
The Support Function Method (SFM) was used to identify the obstacle D fromthe synthetic scattering amplitude with no noise added. The only a priori assump-tion on D was that it was located inside the circle of radius 20 with the center inthe origin. The Support Function was computed for 40 uniformly distributed in S1
vectors l in about 10 seconds on a 333 MHz PC. The results of the identificationare shown in Figure 3. The original obstacle is the solid line. The points were iden-tified according to (63). As expected, the method recovers the convex part of theboundary Γ, and fails for the concave part. The same experiment but with k = 5.0achieves a perfect identification of the convex part of the boundary. In each casethe convex part of the obstacle was successfully localized. Further improvements inthe obstacle localization using the MRC method are suggested in [Ramm 2002(2)],and in the next section.
For the identification of obstacles with unknown boundary conditions let
A(t) = A(α′, α) = |A(t)|eiψ(t)

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 21
2 4 6 8x
2
4y
Figure 3. Identified points and the original obstacle D (solidline); k = 1.0.
where, given t, the vectors α and α′ are chosen as above, and the phase functionψ(t),
√2 < t ≤ 2 is continuous. Similarly, let Aa(t), ψa(t) be the approximate
scattering amplitude and its phase defined by formula (80).If the approximation (80) were exact for any α ∈ R(l), then the value of
|ψa(t) − ktd(l) + 2γ0 − π|would be a multiple of 2π.
This justifies the following algorithm for the determination of the Support Func-tion d(l):
Use a linear regression to find the approximation
ψ(t) ≈ C1t+ C2
on the interval√
2 < t ≤ 2. Then
d(l) =C1
k. (84)
Also
h = −k tanC2
2.
However, the formula for h did not work well numerically. It could only determineif the boundary conditions were or were not of the Dirichlet type. Improvementsare suggested in the next section. Table 4 shows that the algorithm based on (84)was successful in the identification of the circle of radius 1.0 centered in the originfor various values of h with no a priori assumptions on the boundary conditions.For this circle the Support Function d(l) = −1.0 for any direction l.
11. Inverse scattering methods based on the MRC
Suppose that an approximate location of the obstacle D is obtained a numericalinversion method, such as the SFM. Then one can try to use the MRC methodto improve the location of the boundary, see [Ramm 2002(2)]. Such methods areunder development by the authors, and they are going to be discussed elsewhere.Nevertheless, the MRC provides a tool for an easy construction of various examples

22 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
Table 4. Identified values of the Support Function for the circleof radius 1.0 at k = 3.0.
h Identified d(l) Actual d(l)0.01 -0.9006 -1.000.10 -0.9191 -1.000.50 -1.0072 -1.001.00 -1.0730 -1.002.00 -0.9305 -1.005.00 -1.3479 -1.00
10.00 -1.1693 -1.00100.00 -1.0801 -1.00
illustrating the severe ill-posedness of the Inverse Scattering problem, which can beused for the algorithm’s testing.
Here we present one such example. Let the obstacle D be the unit circle {x ∈R2 : |x| ≤ 1}. If the incident field is u0(x) = eikx·α, then the scattered fieldv(x) = −u0(x) for x ∈ S = ∂D, and its scattering amplitude is
A(α′, α) = −√
2
πke−i
π4
∞∑
l=−∞
Jl(ka)
H(1)l (ka)
eil(θ−β) , (85)
where α′ = x/|x| = eiθ, and α = eiβ .Let x1 ∈ R2. Fix an integer L > 0, and let c ∈ C2L+1. Form the radiating
solution
vc(x) =
L∑
l=−L
clH(1)l (k|x− x1|)eilθ1 , (86)
where (x− x1)/|x− x1| = eiθ1 . Then its far field pattern is
Avc(α′) =
√
2
πke−i
π4
(
e−ikα′·x1
L∑
l=−L
cl (−i)leilθ)
, (87)
where α′ = x/|x| = eiθ.Fix an α ∈ S1, and let
rmin = min{‖Avc(α′) − A(α′, α)‖ : c ∈ C
2L+1} . (88)
We conducted the minimization by the Singular Value Decomposition Method de-scribed in Section 3, with the following values of the parameters: k = 1.0, L =5, α = (1.0, 0.0), and x1 = (0.8, 0.0). The L2 norm in (88) was computed overM = 120 directions α′
m uniformly distributed in the unit circle S1, and then nor-
malized by√M , so that the identity function would have the norm equal to 1.
The resulting value of the residual rmin = 0.00009776 indicates that the far fieldA(α′, α) was practically perfectly fit by the radiating solution of the form (86).However, as the Table 5 shows, the restrictions of the exact scattered field v, andthe fitted field vc to the boundary S of the obstacle D are vastly different. Thecolumns in Table 5 correspond to the real and the imaginary parts of the scatteredfields, and the rows correspond to different values of the angle α′. Thus, one has toconclude that, as expected, a coincidence of the radiating solutions at the far fielddoes not imply that the near fields are also coincidental.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 23
Table 5. Near field values of two radiating solutions with practi-cally the same far fields.
α′ Re vc Im vc Re v Im v0.00000 -1189.60834 -227.35213 -0.54030 -0.841470.31416 -73.43878 -15.81270 -0.58082 -0.814030.62832 1.94958 0.19051 -0.69021 -0.723610.94248 0.03298 -0.52343 -0.83217 -0.554521.25664 -1.07968 -0.36021 -0.95263 -0.304121.57080 -1.13445 0.00027 -1.00000 0.000001.88496 -0.96294 0.31629 -0.95263 0.304122.19911 -0.79021 0.55436 -0.83217 0.554522.51327 -0.66472 0.71819 -0.69021 0.723612.82743 -0.59154 0.81406 -0.58082 0.814033.14159 -0.56768 0.84565 -0.54030 0.841473.45575 -0.59154 0.81406 -0.58082 0.814033.76991 -0.66472 0.71819 -0.69021 0.723614.08407 -0.79021 0.55436 -0.83217 0.554524.39823 -0.96294 0.31629 -0.95263 0.304124.71239 -1.13445 0.00027 -1.00000 0.000005.02655 -1.07968 -0.36021 -0.95263 -0.304125.34071 0.03298 -0.52343 -0.83217 -0.554525.65487 1.94958 0.19051 -0.69021 -0.723615.96903 -73.43878 -15.81270 -0.58082 -0.81403
12. Analysis of the Linear Sampling Method.
During the last decade many papers were published, in which the obstacle iden-tification methods were based on a numerical verification of the inclusion of somefunction f := f(α, z), z ∈ R3, α ∈ S2, in the range R(B) of a certain operatorB. Examples of such methods include [Colton 1996], [Colton 2000],[Kirsch 1998].However, one can show that the methods proposed in the above papers have essen-tial difficulties, [ Ramm A.G., Gutman S., preprint].
Although it is true that f 6∈ R(B) when z 6∈ D, it turns out that in any neigh-borhood of f there are elements from R(B). Also, although f ∈ R(B) when z ∈ D,there are elements in every neighborhood of f which do not belong to R(B) evenif z ∈ D. Therefore it is quite difficult to construct a stable numerical methodfor the identification of D based on the verification of the inclusions f 6∈ R(B),and f ∈ R(B). Some published numerical results were intended to show that themethod based on the above idea works practically, but it is not clear how theseconclusions were obtained.
Let us introduce some notations : N (B) and R(B) are, respectively, the null-space and the range of a linear operator B, D ∈ R3 is a bounded domain (obstacle)with a smooth boundary S, D′ = R3 \ D, u0 = eikα·x, k = const > 0, α ∈ S2
is a unit vector, N is the unit normal to S pointing into D′, g = g(x, y, k) :=
g(|x− y|) := eik|x−y|
4π|x−y| , f := e−ikα′·z, where z ∈ R3 and α′ ∈ S2, α′ := xr−1, r = |x|,
u = u(x, α, k) is the scattering solution:
(∆ + k2)u = 0 in D′, u|S = 0, (89)

24 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
u = u0 + v, v = A(α′, α, k)eikrr−1 + o(r−1), as r → ∞, (90)
where A := A(α′, α, k) is called the scattering amplitude, corresponding to the ob-stacle D and the Dirichlet boundary condition. Let G = G(x, y, k) be the resolventkernel of the Dirichlet Laplacian in D′:
(∆ + k2)G = −δ(x − y) in D′, G|S = 0, (91)
and G satisfies the outgoing radiation condition.If
(∆ + k2)w = 0 in D′, w|S = h, (92)
and w satisfies the radiation condition, then ([Ramm 1986]) one has
w(x) =
∫
S
GN (x, s)h(s)ds, w = A(α′, k)eikrr−1 + o(r−1), (93)
as r → ∞, and xr−1 = α′. We write A(α′) for A(α′, k), and
A(α′) := Bh :=1
4π
∫
S
uN (s,−α′)h(s)ds, (94)
as follows from Ramm’s lemma:Lemma 1. ([Ramm 1986], p.46) One has:
G(x, y, k) = g(r)u(y,−α′, k) + o(r−1), as r = |x| → ∞, xr−1 = α′, (95)
where u is the scattering solution of (89)-(90).One can write the scattering amplitude as:
A(α′, α, k) = − 1
4π
∫
S
uN (s,−α′)eikα·sds. (96)
The following claim follows easily from the results in [Ramm 1986], [Ramm 1992](cf [Kirsch 1998]):
Claim: f := e−ikα′·z ∈ R(B) if and only if z ∈ D.
Proof: If e−ikα′·z = Bh, then Lemma 1 and (94) imply
g(y, z) =
∫
S
GN (s, y)hds for |y| > |z| .
Thus z ∈ D, because otherwise one gets a contradiction: limy→z g(y, z) = ∞ if
z ∈ D′ , while limy→z
∫
SGN (s, y)hds < ∞ if z ∈ D′. Conversely, if z ∈ D, then
Green’s formula yields g(y, z) =∫
S GN (s, y)g(s, z)ds. Taking |y| → ∞, y|y| = α′,
and using Lemma 1, one gets e−ikα′·z = Bh, where h = g(s, z). The claim is proved.
�
Consider B : L2(S) → L2(S2), and A : L2(S2) → L2(S2), where B is definedin (94) and Aq :=
∫
S2 A(α′, α)q(α)dα. Then one proves (see [Ramm A.G., GutmanS., preprint]):
Theorem 1. The ranges R(B) and R(A) are dense in L2(S2)Remark 1. In [Colton 1996] the 2D inverse obstacle scattering problem is
considered. It is proposed to solve the equation (1.9) in [Colton 1996]:∫
S1
A(α, β)Gdβ = e−ikα·z, (97)
where A is the scattering amplitude at a fixed k > 0, S1 is the unit circle, α ∈ S1,and z is a point on R2. If G = G(β, z) is found, the boundary S of the obstacleis to be found by finding those z for which ||G|| := ||G(β, z)||L2(S1) is maximal.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 25
Assuming that k2 is not a Dirichlet or Neumann eigenvalue of the Laplacian inD, that D is a smooth, bounded, simply connected domain, the authors stateTheorem 2.1 [Colton 1996], p.386, which says that for every ε > 0 there exists afunction G ∈ L2(S1), such that
limz→S
||G(β, z)|| = ∞, (98)
and (see [Colton 1996], p.386),
||∫
S1
A(α, β)Gdβ − e−ikα·z|| < ε. (99)
There are several questions concerning the proposed method.First, equation (97), in general, is not solvable. The authors propose to solve
it approximately, by a regularization method. The regularization method appliesfor stable solution of solvable ill-posed equations (with exact or noisy data). Ifequation (97) is not solvable, it is not clear what numerical ”solution” one seeks bya regularization method.
Secondly, since the kernel of the integral operator in (97) is smooth, one canalways find, for any z ∈ R2, infinitely many G with arbitrary large ||G||, such that(99) holds. Therefore it is not clear how and why, using (98), one can find Snumerically by the proposed method.
A numerical implementation of the Linear Sampling Method (LSM) suggestedin [Colton 1996] consists of solving a discretized version of (97)
Fg = f , (100)
where F = {Aαi, βj}, i = 1, ..., N , j = 1, ..., N be a square matrix formed bythe measurements of the scattering amplitude for N incoming, and N outgoingdirections. In 2-D the vector f is formed by
fn =ei
π4
√8πk
e−ikαn·z, n = 1, ..., N,
see [Brandfass 2001] for details.Denote the Singular Value Decomposition of the far field operator by F =
USV H . Let sn be the singular values of F , ρ = UHf , and µ = V H f . Thenthe norm of the sought function g is given by
‖G‖2 =
N∑
n=1
|ρn|2s2n
. (101)
A different LSM is suggested by A. Kirsch in [Kirsch 1998]. In it one solves
(F ∗F )1/4g = f (102)
instead of (100). The corresponding expression for the norm of G is
‖G‖2 =
N∑
n=1
|µn|2sn
. (103)
A detailed numerical comparison of the two LSMs and the linearized tomographicinverse scattering is given in [Brandfass 2001].
The conclusions of [Brandfass 2001], as well as of our own numerical experimentsare that the method of Kirsch (102) gives a better, but a comparable identification,

26 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
gnck, k=1.0, noise=0.00
0 5 10 15 200
5
10
15
20
39.0669
70.4666
gnk, k=1.0, noise=0.00
0 5 10 15 200
5
10
15
20
5.39355
34.3851
Figure 4. Identification of a circle at k = 1.0.
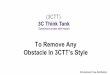
than (100). The identification is significantly deteriorating if the scattering ampli-tude is available only for a limited aperture, or the data are corrupted by noise.Also, the points with the smallest values of the ‖G‖ are the best in locating theinclusion, and not the largest one, as required by the theory in [Kirsch 1998] andin [Colton 1996]. In Figures 4 and 5 the implementation of the Colton-Kirsch LSM(101) is denoted by gnck, and of the Kirsch method (103) by gnk. The Figuresshow a contour plot of the logarithm of the ‖G‖. In all the cases the original obsta-cle was the circle of radius 1.0 centered at the point (10.0, 15.0). A similar circularobstacle that was identified by the Support Function Method (SFM) is discussedin Section 10. Note that the actual radius of the circle is 1.0, but it cannot beseen from the LSM identification. The LSM does not require any knowledge of theboundary conditions on the obstacle. The use of the SFM for unknown boundaryconditions is discussed in Section 10. The LSM identification was performed forthe scattering amplitude of the circle computed analytically with no noise added.In all the experiments the value for the parameter N was chosen to be 128.
13. Remarks about other numerical methods for solving IOSP
There are numerous papers of various authors in which a parameter-fitting pro-cedures are proposed for solving IOSP and the functionals to be minimized do nothave absolute minimum equal to zero, and are not defined on the exact solution.For example, in [Colton 1992] one takes a closed surface S0 inside the unknown

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 27
gnck, k=5.0, noise=0.00
0 5 10 15 200
5
10
15
20
40.3464
67.6481
gnk, k=5.0, noise=0.00
0 5 10 15 200
5
10
15
20
7.64083
32.7948
Figure 5. Identification of a circle at k = 5.0.
obstacle with the boundary S, assumes that k2 is not a Dirichlet eigenvalue ofthe Laplacian in the domain D0 with the boundary S0, and use the approximaterelation
−4πA(α′, α) =
∫
S0
e−ik(α′,s)h(s, α)ds (104)
as an integral equation for the equation of S in spherical coordinates r = f(α′)(assuming S to be star-shaped). One can prove that, for any fixed α ∈ S2, the set∫
S0e−ik(α
′,s)h(s, α)ds is dense in L2(S2) when h runs through a dense subset of
L2(S0) ([Ramm 1984]). In (104) the unknown is h. If h is found, then the functionf , which determines S, is to be calculated as the solution to the equation
∫
S0
g(f(α′)α′, s)hds = −eik(α,f(α′)α′), (105)
where g(x, s) := eik|x−s|
4π|x−s| . It is recommended to solve equations (104) and (105) by
a regularization method. In fact, equation (104) is, in general, not solvable, andequation (105) may be not solvable either.
The disadvantages of these methods are discussed in [Ramm 1994]. There andin [Ramm 1994(4)] some functionals are proposed which are defined on the exactsolution to IOSP and attain absolute minimum equal to zero at the exact solutions.
Another approach is to use a regularized Newton-type method for solving non-linear integral equation to which the IOSP can be reduced (e.g, see [Kress 2000]).

28 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
In [Ramm 1994(2)] an inversion formula for calculating the obstacle from fixed-frequency scattering data is given, but an open problem is to find an algorithm forcomputing the function ν in this inversion formula. Such an algorithm for comput-ing a similar function ν in the inverse potential scattering problem (IPSP) is givenin [Ramm 2002].
14. Conclusions
Given an obstacle D, Lord J. W. Rayleigh conjectured about 100 years ago[Rayleigh 1907] (”Rayleigh hypothesis”) that the scattered field in the entire exte-rior of the obstacle is represented by the series
v(x) =
∞∑
l=−∞
alH(1)l (k|x|)eilθ , (106)
where x/|x| = (cos(θ), sin(θ)), see (9). In the case of the scattering by a periodicstructure, the series corresponding to (106) is (28). While this conjecture is notvalid, it has been widely used for numerical solution of scattering problems byphysicists and engineers. We proposed a modification of the Rayleigh conjecture,which is a Theorem. This MRC (Modified Rayleigh Conjecture) can be used fora numerical solution of scattering problems, and it gives an error estimate for thissolution. The results we present in this review paper show that the MRC methodis a competitive alternative to the BIEM (boundary integral equations method).This approach has numerical advantages especially for complex domains whoseboundaries contain corners in 2-D case, and vertices and edges in 3-D case. Variousversions of the MRC have been successfully applied to two and three-dimensionalscattering problems. We also discuss an adaptation of the MRC method for periodicscattering problems after a short introduction into its theory.
In another development, we present a novel method (Support Function Method)for the solution of the Inverse Obstacle Scattering Problem (IOSP), and compareits performance to the Linear Sampling Method. The SFM is derived from a highfrequency scattering approximation. However, we also demonstrate its applicabilityin the resonance region of frequencies. This method can be applied even whenthe scattering boundary conditions are not known. Our theoretical and numericalstudy of Linear Sampling methods show that they may not be suitable for noisy orincomplete data, and that a further research effort is needed to improve obstacleidentification in Inverse Scattering Problems.
References
[Alber 1978] Alber HD 1978/79; A quasi-periodic boundary value problem for the Laplacian and
the continuation of its resolvent; Proceedings Royal Society of Edinburgh, Section A; 82(3-4):251–272.
[Albertsen 1999] Albertsen NC, Chesneaux J-M, Christiansen S, Wirgin A 1999; Comparisonof four software packages applied to a scattering problem; Mathematics and Computers in
Simulation ; 48: 307-317.[Barantsev 1971] Barantsev R 1971; Concerning the Rayleigh hypothesis in the problem of scat-
tering from finite bodies of arbitrary shapes; Vestnik Lenungrad University, Mathematics,Mechanics, Astronomy ; 7: 56-62.
[Bonnet-Bendhia 1994] Bonnet-Bendhia A 1994; Guided waves by eletromagnetic gratings andnon-uniqueness examples for the diffraction problem, Mathematics in the Applied Sciences ;
17: 305-338.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 29
[Bonnet-Bendhia 2002] Bonnet-Bendhia A, Ramdani K 2002; Diffraction by an acoustic grating
perturbed by a bounded obstacle; Advances in Computational Mathematics ; 16: 113-138.[Brandfass 2001] Brandfass M, Lanterman AD, Warnick KF 2001; Acomparison of the Colton-
Kirsch inverse scattering methods with linearized tomographic inverse scattering; InverseProblems ; 17: 1797-1816.
[Christiansen 1996] Christiansen S, Kleinman RE 1996; On a misconception involving pointcollocation and the Rayleigh hypothesis; IEEE Transactions on Antennas and Propaga-
tion ;44(10): 1309-1316.[Colton 1992] Colton D, Kress R 1992, Inverse Acoustic and Electromagnetic Scattering Theory,
Springer-Verlag, New York.[Colton 1996] Colton D, Kirsch, A 1996; A simple method for solving inverse scattering problems
in the resonance region; Inverse Problems ; 12(4): 383–393.[Colton 2000] Colton D, Coyle J, Monk P 2000; Recent developments in inverse acoustic scattering
theory; SIAM Review ;42(3): 369–414 .[Eidus 1963] Eidus DM 1963; Some boundary-valueproblems in infinite regions; Izvestia Akademii
Nauk SSSR, Seria Mathematica ; 27: 1055–1080.[Gol’dshtein 2001] Gol’dshtein V, Ramm AG 2001; Embedding operators for rough domains;
Mathematical Inequalities and Applications ; 4(1): 127-141.[Gutman 2002] Gutman S, Ramm AG 2002; Numerical Implementation of the MRC Method for
obstacle Scattering Problems; Journal Physics, A: Mathematics, General ; 35; 8065-8074.[Gutman 2003] Gutman S, Ramm AG 2003; Support Function Method for Inverse Scattering
Problems; In the book ”Acoustics, mechanics and related topics of mathematical analysis”,(ed. A.Wirgin), World Scientific, New Jersey, 178-184.
[Kazandjian 1992] Kazandjian L 1992; Rayleigh-Fourier and extinction theorem methods appliedto scattering and transmission at a rough solid-solid interface; Journal Acoustical Society of
America ; 92: 1679-1691.[Kazandjian 1995] Kazandjian L 1995; Comments on ”Reflection from a corrugated surface revis-
ited”, [J. Acoust. Soc. Am., 96, 1116-1129 (1994)]”; Journal Acoustical Society of America ;98: 1813-1814.
[Kirsch 1998] Kirsch A 1998; Characterization of the shape of a scattering obstacle using thespectral data for far field operator; Inverse Problems ; 14: 1489-1512.
[Kress 2000] Kress, R 2000; Integral equation methods in inverse obstacle scattering; ANZIAMJournal ; 42(1): 65–78.
[Lions 1972] Lions JL, Magenes E 1972, Non-Homogeneous Boundary Value Problems and Ap-plications, Springer, New York.
[Millar 1971] Millar R 1971; On the Raleigh assumption in scattering by a periodic surface; Pro-ceedings Cambridge Philosophical Society ; 69: 217-225. 65: (1969) 773-791.
[Millar 1973] Millar R 1973; The Rayleigh hypothesis and a related least-squares solution to thescattering problems for periodic surfaces and other scatterers; Radio Science; 8: 785-796.
[Nazarov 1994] Nazarov S, Plamenevskii B 1994, Elliptic problems in domains with piecewisesmooth boundaries; de Gruyter Expositions in Mathematics ; 13, Walter de Gruyter, Berlin.
[Petit 1980] Petit R. (editor) 1980, Electromagnetic theory of gratings, Topics in Current Physics,
22, Springer-Verlag, Berlin-New York.[Press 1992] Press WH, Teukolsky SA, Vetterling WT, Flannery BP 1992; Numerical Recepies in
FORTRAN, Second Edition, Cambridge University Press.[Ramm 1963] Ramm AG 1963; Investigation of the scattering problem in some domains with
infinite boundaries I, II; Vestnik ; 7: 45-66; 19: 67-76.[Ramm 1965] Ramm AG 1965; Reconstructionof the domain shape from the scattering amplitude;
Radiotechnika i Electronika ; 11: 2068-2070.[Ramm 1984] Ramm AG 1984; On a property of the set of radiation patterns; Journal of Math-
ematical analysis and Applications ; 98: 92-98.[Ramm 1986] Ramm AG 1986, Scattering by Obstacles, D. Reidel Publishing, Dordrecht, Holland.
[Ramm 1986(2)] Ramm AG 1986; Singularities of the inverses of Fredholm operators; Proceedingsof Royal Society of Edinburgh ; 102A: 117-121.
[Ramm 1992] Ramm AG 1992, Multidimensional Inverse Scattering Problems, Longman/Wiley,New York.
[Ramm 1993] Ramm AG 1993; Scattering amplitude as a function of the obstacle, Applied Math-ematics letters ; 6(5): 85-87.

30 NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS
[Ramm 1994] Ramm AG 1994, Multidimensional Inverse Scattering Problems, Mir, Moscow
(expanded Russian edition of [Ramm 1992]).[Ramm 1994(2)] Ramm AG 1994; Stability of the solution to inverse obstacle scattering problem;
Journal of Inverse and Ill-Posed Problems ; 2(3): 269-275.[Ramm 1994(3)] Ramm AG 1994; Stability estimates for obstacle scattering; Journal of mathe-
matical Analysis and Applications ; 188(3): 743-751.[Ramm 1994(4)] Ramm AG 1994; Numerical method for solving inverse scattering problems;
Doklady of Russian Academy of Sciences ; 337(1): 20-22.[Ramm 1995] Ramm AG 1995; Uniqueness theorems for inverse obstacle scattering problems in
Lipschitz domains; Applicable Analysis ; 59: 377-383.[Ramm 1995(2)] Ramm AG 1995; Continuous dependence of the scattering amplitude on the
surface of an obstacle; Mathematical Methods in the Applied Sciences ; 18: 121-126.[Ramm 1998] Ramm AG, Makrakis G 1998; Scattering by obstacles in acoustic waveguides; in
the book: Spectral and scattering theory , editor A.G. RAMM, Plenum publishers, New York,pp. 89-110.
[Ramm 2000] Ramm AG, Pang P, Yan G 2000; A uniqueness result for the inverse transmissionproblem; International Journal of Applied Mathematics ; 2(5): 625-634.
[Ramm 2000] Ramm AG, Sammartino M 2000; Existence and uniqueness of the scattering solu-tions in the exterior of rough domains; in the book Operator Theory and Its Applications,
American Mathematical Society, Fields Institute Communications (editors A.G. Ramm, P.N.Shivakumar, A.V. Strauss), 25: 457-472, Providence, RI.
[Ramm 2002] Ramm AG 2002; Stability of solutions to inverse scattering problems with fixed-energy data; Milan Journal of Mathematics ; 70: 97-161.
[Ramm 2002(2)] Ramm AG 2002; Modified Rayleigh Conjecture and Applications; Journal ofPhysics, A: Mathematics, General ; 35: L357-L361.
[Rayleigh 1907] Rayleigh JW 1907; On the dynamical theory of gratings; Proceedings of the RoyalSociety, A; 79: 399-416.

NUMERICAL SOLUTION OF OBSTACLE SCATTERING PROBLEMS 31
FIGURE CAPTIONS
Figure 1.The kite-shaped obstacle used in Experiment II.
Figure 2.Identified (dotted line), and the original (solid line) obstacle D for k = 1.0.
Figure 3.Identified points and the original obstacle D (solid line); k = 1.0.
Figure 4.Identification of a circle at k = 1.0.
Figure 5.Identification of a circle at k = 5.0.




![Obstacle Avoidance for 2D Quadrotor with Hanging Load · Robotics and Automation (ICRA), 2013. [2] Xiaojing Zhang, Alexander Liniger, and Francesco Borrelli. Optimization-based collision](https://img.pdfslide.us/doc/110x75/6003b832e2f4d218c3015687/obstacle-avoidance-for-2d-quadrotor-with-hanging-load-robotics-and-automation-icra.jpg)