Embed Size (px)
Citation preview

Lecture 6InterpolationDirect Method & Lagrange Method
For Slides Thanks toDr. S. M. Lutful KabirVisiting Professor, BRAC University& Professor, BUET
Numerical Methods

2
What is interpolation?
Many times, data is given only at discrete points such as
........... . So, how then does one find the value of y at any other value of x ?
Well, a continuous function f(x) may be used to represent the n+1 data values with f(x) passing through the n+1 points (Figure 1).
Then one can find the value of y at any other value of x. This is called interpolation.
LxUx Lxf Uxfrx %a mxf ,, 00 yx
,, 00 yx ,, 11 yx ,, 22 yx nn yx , ,, 11 nn yx
(x1,y1
)
(x2,y2
)(x0,y0
)
(x3,y3
)
x
y
f(x)
Figure 1

3
Polynomial interpolation?
Of course, if new ‘x’ falls outside the range of x for which the data is given, it is no longer interpolation but instead is called extrapolation.
So what kind of function f(x) should one choose? A polynomial is a common choice for an interpolating function because polynomials are easy to evaluate, differentiate, and integraterelative to other choices such as a trigonometric and exponential series
Polynomial interpolation involves finding a polynomial of order n that passes through the n+1 points

4
Direct Method of Interpolation
One of the methods of interpolation is called the direct method.
Other methods include the Lagrangian interpolation method and Newton’s divided difference polynomial method
The direct method of interpolation is based on the following premise. Given n+1 data points, fit a polynomial of order n as given below
(1) through the data, where a0, a1, a2,....... an+1, an are
real constants.
nn xaxaay ...............10
5
Direct Method of Interpolation (continued)
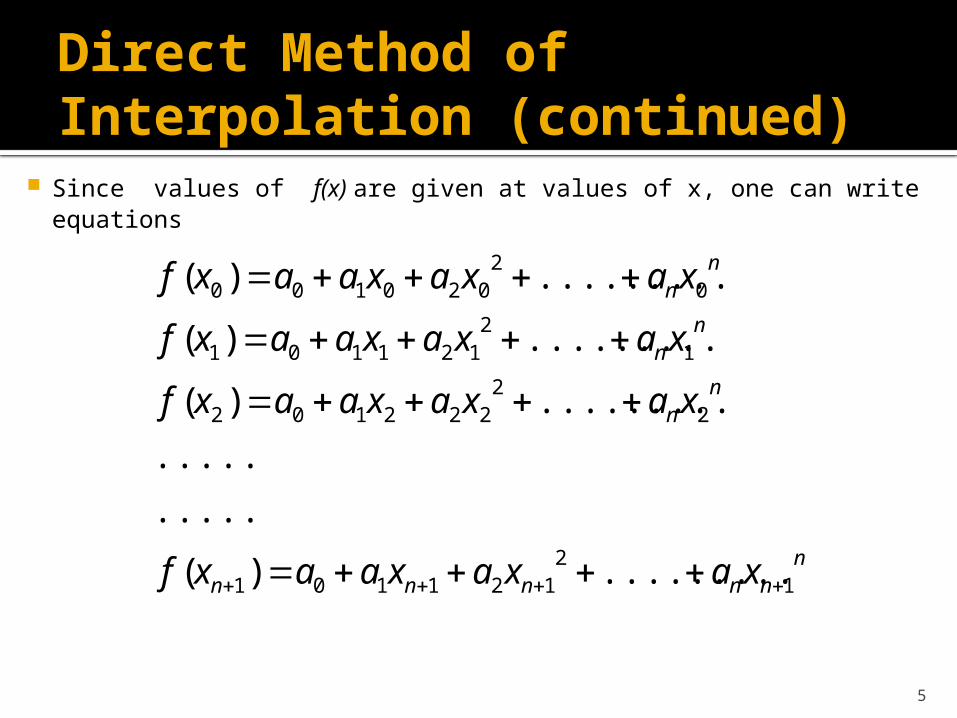
Since values of f(x) are given at values of x, one can write equations
nnnnnn
nn
nn
nn
xaxaxaaxf
xaxaxaaxf
xaxaxaaxf
xaxaxaaxf
12
121101
22
222102
12
121101
02
020100
.........)(
.....
.....
.........)(
.........)(
.........)(

6
Direct Method of Interpolation (continued)
Then the constants, can be found by solving the simultaneous linear equations.
To find the value of f(x) at a given value of x, simply substitute the value of x in Equation 1.
But, it is not necessary to use all the data points.
How does one then choose the order of the polynomial and what data points to use?
This concept and the direct method of interpolation are best illustrated using examples

7
Example 1
The upward velocity of a rocket is given as a function of time in Table 1. Corresponding graph is shown in Figure 1
Time (s) Velocity (m/s)0 0
10 227.04
15 362.78
20 517.35
22.5 602.97
30 901.67
t )(tv
Table 1: Velocity as function of time Figure 1: Graph of Velocity
Determine the value of the velocity at t = 16seconds using the direct method of interpolation and a first order polynomial.

8
Solution to example 1
For first order polynomial interpolation (also called linear interpolation), the velocity is given by
00 , yx
11, yx
xf1
xy
Figure 3 Linear interpolation
y
x(x0 , y0)
(x1 , y1)
f1(x)

9
Solution to example 1 (continued)
Since we want to find the velocity at t=16 sec, and we are using a first order polynomial, we need to choose the two data points that are closest to t = 16 sec that also bracket t=16 sec to evaluate it. The two points are t0=15 sec and t1=20 sec
Then t0=15, v(t0)=362.78 a0=-100.93t1=20, v(t1)=517.35 a1=30.914
Givesv(15)=a0+a1 x 15=362.78 v(t)=ao+a1tv(20)=a0+a1 x 20=517.35 v(16)=393.7

10
Example 2 Determine the value of the velocity at t = 16 seconds using the
direct method of interpolation and a second order polynomial.
00 , yx
11, yx
22 , yx
xf2
SolutionFor second order polynomial interpolation (also called quadratic interpolation), the velocity is given by
v(t)=a0+a1t+a2t2
y
x
x0 , y0
x1 , y1
x2 , y2
f(x)

11
Solution to example 2 (continued)
Since we want to find the velocity at t=16, and we are using a second order polynomial, we need to choose the three data points that are closest to t = 16 that also bracket t = 16 to evaluate it. The three points are t0=10, t1=15 and t2=20
Then v(10)=227.04=a0+a1 x 10+a2 x 102
v(15)=362.78=a0+a1 x 15+a2 x 152 v(20)=517.35=a0+a1 x 20+a2 x 202
They gives, a0=12.05a1=17.733a2=0.3766

12
Solution to example 2 (continued)
Hence v(t)=12.05+17.733t+0.3766t2
V(16)=392.19 m/s
The absolute relative approximate error obtained between the results from the first and second order polynomial is
a
10019.392
70.39319.392
a
%38410.0

13
Example 3
For the rocket problem of the previous examples
a) Determine the value of the velocity at t=16 seconds using the direct method of interpolation and a third order polynomial.
b) Find the absolute relative approximate error for the third order polynomial approximation.
c) Using the third order polynomial interpolant for velocity from part (a), find the distance covered by the rocket from t=11 s to t=16 s.
d) Using the third order polynomial interpolant for velocity from part (a), find the acceleration of the rocket at t=16s.

14
Solution to example 3
For third order polynomial interpolation (also called cubic interpolation), we choose the velocity given by 3
32
210 tatataatv
(x0 , y0)
(x1 , y1)
(x2 , y2)
(x3 , y3)
x
y
f3(x)

15
Solution to example 3 (continued)
Since we want to find the velocity at t=16, and we are using a third order polynomial, we need to choose the four data points closest to and also bracket that.
The four points are (t0, v0)=(10, 227.04), (t1, v1)=(15, 362.78), (t2, v2)=(20, 517.35) and (t3, v3)=(22.5, 602.97)
Solving the above four equations gives a0= - 4.2540 a1= 21.266
a2= 0.13204a3= 0.0054347
Hence, v(t) = - 4.2540 + 21.266 t + 0.13204 t2 + 0.0054347 t3
So, v(16)= 392.06 m/s

16
Solution to example 3 (continued)
b) The absolute percentage relative approximate error for the value obtained for v(16) between second and third order polynomial is
c) The distance covered by the rocket between
t=11s and t=16s can be calculated from the interpolating polynomial
Note that the polynomial is valid between t = 10 s and t = 22.5 s and hence includes the limits of integration of t = 11 s and t = 16 s
a
10006.392
19.39206.392
a %033269.0
5.2210,0054347.013204.0266.212540.4 32 tttttv

17
Solution to example 3 (continued)
16
11
1116 dttvss
dtttt 16
11
32 )0054347.013204.0266.212540.4(
16
11
432
40054347.0
313204.0
2266.212540.4
tttt=
= 1605m
d) The acceleration at t=16sec is given by,
16
16
t
tvdt
da
5.2210,0054347.013204.0266.212540.4 32 tttttv
32 0054347.013204.0266.212540.4)( tttdt
dta
So, a(16) = 29.665 m/s2

18
Solving the coefficients of polynomial having high order
n
n
n
nn
nn
nnnnn
nn
nn
nnnnn
nn
nn
nnnnn
nnn
nnn
nnn
n
n
n
a
a
a
a
a
a
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xxxxxx
xf
xf
xf
xf
xf
xf
1
2
3
1
0
1232
111
21
31
211
212
22
32
222
21
22
232
222
11
12
131
211
01
02
030
200
1
2
2
1
0
....
....
.............1
..........1
..........1
......
......
.............1
.............1
............1
)(
)(
)(
.....
.....
)(
)(
)(
[Y] = [C] [A] Since [Y] = [C] [A] So, [A] = [C]-1 [Y]
If the polynomial is of nth order, there are n numbers of unknowns, how to find out them?
One way is to arrange the equations in matrix form as shown below:

19
Langrange Method
The Lagrangian interpolating polynomial is given by
where n in fn(x) stands for the nth order polynomial that approximates the function y=f(x) given at n+1 data points as (x0,y0), (x1,y1), (x2,y2),……. (xn-1,yn-1), (xn, yn) and
Li(x) is a weighting function that includes a product of n-1 terms with terms of j = i omitted. The application of Lagrangian interpolation will be clarified using an example.
n
iiin xfxLxf
0
)()()(
n
ijj ji
ji xx
xxxL
0
)(

20
Example 4
Determine the value of the velocity of the rocket problem at t=16 seconds using a first order Lagrange polynomial.
Solution For first order polynomial interpolation (also
called linear interpolation), the velocity is given by
1
0
)()()(i
ii tvtLtv
)()()()( 1100 tvtLtvtL
1
00 0
0 )(
jj j
j
tt
tttL
10
1
tt
tt
1
10 1
1 )(
jj j
j
tt
tttL
01
0
tt
tt
Hence,
v(16) = 393.69 m/s
)()()( 101
00
10
1 tvtt
tttv
tt
tttv
21
Solution to example 4
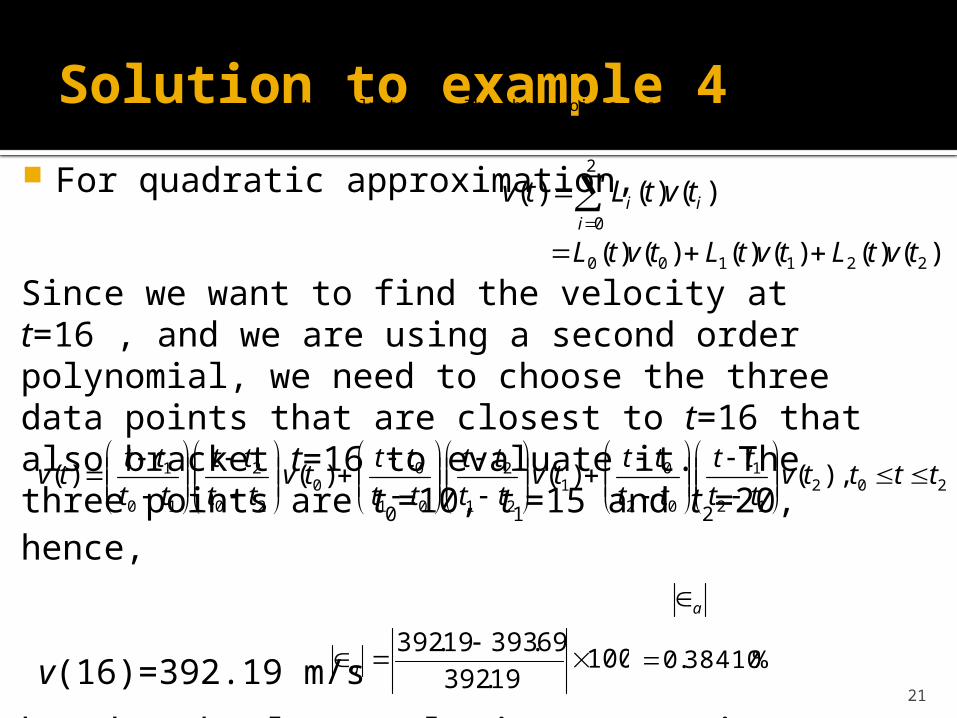
For quadratic approximation,
2
0
)()()(i
ii tvtLtv
)()()()()()( 221100 tvtLtvtLtvtL
16t16t16t
20 and ,15 ,10 210 ttt
Since we want to find the velocity at
to evaluate it. The three points are
.
Since we want to find the velocity at t=16 , and we are using a second order polynomial, we need to choose the three data points that are closest to t=16 that also bracket t=16 to evaluate it. The three points are t0=10, t1=15 and t2=20, hence,
v(16)=392.19 m/s
b) The absolute relative approximate error with respect to direct method is
20212
1
02
01
21
2
01
00
20
2
10
1 ),()()()( ttttvtt
tt
tt
tttv
tt
tt
tt
tttv
tt
tt
tt
tttv
a
10019.392
69.39319.392
a %38410.0

22
Flow Chart for Direct Method
n
x(i), y(i), i=1,1,....n+1
xu
for i=1..n+1
xu, fxu
Start
FT
for j=1..n+1
TF
c(i,j)=x(i)^(j-1)
ci=inv(c)
for i=1..n+1 F
T
for j=1..n+1T
a(i)=0
a(i)=a(i)+ci(i,j)*y(j)
for i=1..n+1T
fxu=0
fxu=fxu+a(i)*xu^(i-1)
F
F
1
2
3
4
5
6
7
8
16
9
10
11
12
13
14
15End
17

Flow Chart for Langrage method
23
n L(i)=1
L(i)=L(i)*(xu-x(j))/(x(i)-x(j))
fxu=fxu+L(i)*y(i)
x(i), y(i), i=1...n+1
xu
for j=1..n+1 j : i
fxu=0
for i=1..n+1
xu, fxu
Start
==
TF
T
F
5
1
2
3
4
6
10
8
7
9
11
10
End12

24
Thanks
















![Inexpensive discrete PSD controller with PWM power output · constant value, results in a stabilizing at a new value [5]. This leads to creation of a permanent control deviation](https://img.pdfslide.us/doc/110x75/5eb440ab27c76a5ea523f152/inexpensive-discrete-psd-controller-with-pwm-power-output-constant-value-results.jpg)











