Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL FOR NUMERICAL METHODS IN ENGINEERING, VOL. 22,219-228 (1986)
NUMERICAL CONTROL OF THE HOURGLASSINST ABILITY
O.-P. JACQUOTTE. 1. T. ODEN AND E. B BECKER
Texas [llstitllle for Computational Mechallics. The Ulliversity of Texas at Austill. Austill. Texas. U.S.A,
INTRODUCTION
Numerical integration of stiffness matrices in finite element analysis can represent a significantportion of the overall computational effort. To improve computational efficiency, it has becomea practice of some analysts to 'underintegrate' the various element stiffnesses. i,e. to employ anumerical quadrature rule of an order less than that required to yield exact values for polynomialintegrands defined on regular meshes. While such underintegration can significantly reducecomputational effort. the resulting matrices may be rank deficient and solutions to the equationsof the resulting discrete system may contain 'spurious modes', i.e, zero energy components whichare manifested in the computed solutions as oscillatory patterns called hourglass modes.
Procedures exist for eliminating or damping hourglass instabilities. One technique is to addcorrective terms to the underintegrated stiffness matrix prior to solving the discrete problem.These so-called a priori stabilization procedures have been studied and developed by Belytschkoand Liu and their collaboration (see, for example. References 1-4). Alternatively. an a posterioristabilization technique has been introduced in which the' glob~ll rank-deficient stiffness matrixis used to compute an approximate solution and the spllrious modes are then eliminated by aprojection scheme-a so-called hourglass filter. This idea has been advanced by Jacquotte andOden.s-s
Surprisingly good solutions can often be obtained using the a posteriori liItering technique.Indeed, for one-point integration of QJ(4-node quadrilateral) elements in approximations of thetwo-dimensional Poisson problems. a filtered solution can be obtained which exhibits the samerate of convergence as the fully integrated solution (for sufficiently regular solutions) at a fractionof the cost. Similar results have been obtained for other types of isoparametric elements.
Our mission in the present paper is to review some of the concepts underlying the a posterioriunderintegration scheme and to present representative numerical results obtained using thisprocedure. We also provide the results of numerical experiments designed to assess theperformance of this scheme for problems with singularities and for cases in which irregular meshesare used.
HOURGLASS CONTROL FOR A SIMPLE MODEL PROBLEM
This first section is devoted to presenting the method used in solving the linear system of equationsobtained with an underintegrated matrix, This system is solved up to an arbitrary hourglassmode, and this unknown degree-of-freedom is then eliminated by a post-processing operation.The basic ideas are more easily understood when demonstrated for a simple Neumann problemdefined on a domain n in R2.
0029- 598] /86/020219-1 0$0 1.00© 1986 by John Wiley & Sons, Ltd.
Received /5 Decemher /984

220 O.·P. JACQUOTTE. J, T. ODEN AND E. B. BECKER
Let I be a given function in L2(n). satisfying
L/dX=O
Then we consider the following variational problem:(P): Find UE V such that
(u, vh = (f, v)o, 'v'VE Vwhere
(u, V)l = an inner product on V
= In Vu·V"dx
(f, g)o = an inner product on u(n)/IR
=f IgdX-~nf Idxf gdxn meas n n
A discrete formulation of P is given as follows:(ph): Find UhE Vh such that
(uh• Vh)1 = (fA' Vh)O' VVhE VA
(1)
(2)
(3)
Where Vh is the approximation space and Ih is a Vh approximation of I satisfying the equilibriumequation (I). It is easily shown that unique solutions exist to problems P and ph.
In a finite clement calculation. the. integral present in (3). used to define the U and H I innerproducts, are evaluated element by element and then added to obtain the global force and stiffnessmatrix that are used to calculate the approximate solution, It is well known that. whereas fullintegration leads to a reasonable stiffness matrix (its kernel contains only the expected constantmode), an underintegration produces a matrix with an expanded kernel: the resulting matrix isrank deficient and spurious modes appear in its kernel. For the Q)-4-node, bilinear element.the spurious modes, known as hourglass modes, are characterized by a piecewise bilinear functionwhich assumes the alternating values of + 1 or - 1 at the nodes for arbitrary mesh geometries
Figure I.. ±. paltern or Ihe hourglass mode in an arbilrary mesh

HOURGLASS INSTABILITY 221
(Figure I). It is also of interest to note that this hourglass mode exists in the kernel for bothHl_ and U inner products when these are underintegrated. Therefore. it can be proved that theunderintegrated problem ph is well p6sed in a quotient space Ph, where
(ph): Find ,jI'Evh such that
(iih• Vh)l.h = (fh, Vh)O.h V VhE ph (4)with
ph = Vh/{Hourglass modes} (5)
Here. (-, ·It.h, (-. ·)O.h denotc the underintegrated HI and L2 inner products.Solving Ph, we can obtain a solution iih, defined only to within an arbitrary hourglass mode.
From a computational point of view. the underintegrated system. with matrix Kunder. can beinverted by fixing two nodes (neighbours in the same clement). We thereby obtain an elementiih of the class iih. For this particular element. we consider the projection
(6)
where H "is the hourglass mode and
(7)
The image ii" of the projection is independent of the choice of ii" in its class and it has beenproved6 that jjh is indeed a good approximation of the solution II of P. In fact. the proof hasbeen carried out for a regular mesh of bilinear elements. and a direct comparison between IIh
and iih is providcd by the estimate
(8)
By the triangle inequality, the same order of accuracy holds for 11- iih.Other theoretical results have been obtained for various operators similar to - tJ. with Neumann
boundary conditions, In particular. the results are thc same if we add a mass term to - tJ. andconsider the opcrator - tJ. + I. Similar results hold for other types of boundary conditions. Indeed,while the imposition of Dirichlet or mixed boundary conditions eliminates the hourglass mode.it has been proved that the solution obtained from the inversion of this underintegrated matrixsatisfies the same estimatc as in (8) and is thcreforc accurate,S
The proof of all these results relies on the tensor product properties of the bilinear elementand of the Gauss integration rules. Generalizations can be expccted to hold for similar biquadraticelements. and encouraging numerical results will be shown in the following section. Also. thegeneralization from simple one-dimensional Laplacian cquation to two- or three-dimensionallinear elasticity problems with a large pay-off in efficiency can be expected when the underin-tegration is performed on the 8-node brick element (1 integration point instead of 8).
For three-dimensional elasticity problems. the undcrintegrated solution is obtained by fixingenough degrees-or-frecdom to eliminate six rigid body modes and to fix the three hourglass modesdefined by
H1=(H.O,O), H2=(O,H.0). H3=(0,O.m
A posteriori, the control will consist in implementing the projection
-h -h f. a(uh, Hi) LIu=u-,L. II
i- I a(Hj• Hi)
Our next task is to describc how to computc efficiently the coefficient A. in (6) and (7).
(9)

222 O,-P. JACQUOTTE. 1. T. ODEN AND E. B. BECKER
IMPLEMENTATION OF THE PROJECTION
In order to preserve the efficiency of the method provided by underintegration, one must findan efficient way to compute the parameter A. in (6). One way that suggests itself is to calculatethe HI inner products of (7) using numerical integration. The use of a one-point rule would beabsurd and would lead to a ratio 0/0. The use of a 4 Gauss point rule has been numericallyimplemented and gives good results (similar to those to be presented next), but the cost of thisintegration is ex'pensive, as shown in Table I. This method is therefore rejected.
We shall now describe a more efficient method with related numerical results shown in thenext section, This method relies on the fact that, for the bilinear element, the stiffness matrixcan be decomposed into two parts, one of which contains H in its kernel. The other part is suchthat the image of H is cheap to calculate.
This decomposition, proved in Reference 6. can be written as
(10)
where K:mt and K~ndcr, respectively, are the exact element stiffness matrix and its underintegratedform, and Be and Ye arc, respectively, a real number and a vcctor depending upon the geometry ofthe element. If we denote by x and y thc co-ordinate vectors of the four nodes of a given element, r e
can simply be expressed as
hTx hTyre = h -,Oel b
l-'Oel b2 (11)
wherc
and
hT = (1. - I, t, - I) (a 'local' hourglass mode)
bI = t(y2 - Y4' Yl - Yl,)'4 - Y2' YI - Yl) }bJ = t(x4 - X2• XI - Xl' X2 - X4' Xl - xd (12)
Oe =t[(Y2 - Y4)(XI -Xl) + (Yl - Yd(X2 - X4)]
is the element area. The vector Ye is very easily calculated.The inner product (iih, Hlt may, therefore. be calculated by using the decomposition (11) of
Kmc'. Introducing the nodal vectors 0 and H associated with the function iih and H, we have
(iih, H)I = UTKmcl H = UT'L£ere'ri'He
= L£e(ri·Oe)(ri'He)
where De and He are the values of 0 and H at the nodes of the element e. We note that if the
Table I. Cost of computation of ). with a full integration
Stiffness with full integrationStiffness with underintegrationControl with full inlegration
4-node element(full integration. 4 points;underintegration, 1 point)
1·00'410'51
9-node element(full integration. 9 points:underintegration. 4 poinIs)
1·00·520,34

HOURGLASS INSTABILITY
values of Hare + 1 or - 1. the scalar vector product r;.He is always ± 4, Therefore4
(iih, H)I = 4L ± ee L Y~II~e i= 1
and
223
(13)
(14)
(15)
These expressions are still exact since no approximation has been made on ee' If we supposethat the Jacobian of the element is approximately constant (true for parallelogram elements), ee issimply expressed as
ii,. = 24~ (XI - X3)2 + (x2 - x4f + (Yl - Y3)2 + (Yl - Y4)2)e
The calculation of the approximate projection can be summarized in the following algorithm:
Remark. The notations previously used are essentially those found in the work of Belytschkoand co-workers I -4 on stabilization methods. These methods rely on the decomposition (10);however, the stabilization term !:Y' rT is a priori added to the underintegrated matrix to preventthe spurious modes from the kernel of the stiffness matrix, whereas our control method uses thevery same term a posteriori. after solving with the underintegrated matrix. This a posteriori methodhas not yet been tested on more complicated linear or nonlinear problems. but its implementationin linear elasticity appears to be also very attractive. •
For a two-dimensional problem characterized by the operator
A= -BCBT
where(16)
B=(:and
the decomposition can be written:
(17)
(18)
(19)

224
where
O.-P, JACQVOTTE. J, T. ODEN AND E. B. BECKER
[or] = (C II Cn + (C 13 + C,\ I )';X)' + C 33CXX'.· C \3eY). + (C 12 + C 33)i:XY + C32in) (20C31f.).)· + (C 21 + C 33 )j:X)' + C23Cx).: C33CY), + (C 32 + Cn)ix)' + C 22Cx.< )
The decomposition (19) is exact, but the ifs can be simply calculated only when the Jacobian issupposed to be constant. Then
I 2 2f.xx=240 ((XI-X3) +(X2-X4))
e
If.xy= -240 «X\-x3)(Y\-Y3)+(X2-X4)(Y2-Y4))
e(21)
with Oe = meas(O.). A similar algorithm can be derived for implementation of the projections.
NUMERICAL RESULTS
For the purpose of verifying accuracy and efficiency of thc a posteriori method. the Poissonproblem was solved on various domains partitioned with regular or irregular mesh of elements(4- or 9-node elements). for data (right-hand sides) of various regularity. The accuracy was observedby calculating the ratc of convergence of the solution as thc mesh is refined. Since thc rate ofconvergence of IIh (full integration) toward the exact solution II is known. we need only directlycompare 1/' with the stabilized lih obtained with underintcgration and projection.
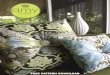
The first serics of examples involves forcing functions of various regularity across a singularityline. The domain is the unit squarc and the mesh is composed of identical square elements. Thesingularity line (y = 3(] - x)/2) crosses the mesh. The results shown in Figure 2 were obtainedfor data in L2 (f discontinuous; Figure 2a). and for data in HI (f continuous. not C1: Figure2b). Even though the theory predicts respective t2-HI rates of2 and 1 between Il'and air, accordingto (8), numerical results exhibit better rates (2 and 1·61 and then 2 and 2) as the regularity ofthe data increases. Thc rates of convergence of jjh toward II remain 2 and 1.
For the 9-node clcmcnt. the comparison betwcen 9- and 4-point integration leads to even moresurprising estimates: whereas rates 3 and 2 are expccted. we obtained 1·99 and 1·74 for adiscontinuous function (f E L2). thcn 2·43 and 1·97 for a continuous. not CI• function (.f EH I).2·95 and 1·95 for a CI, not C2 function (f E H2) and finally 4 and 3 for a Ct. data. Thcrefore.the rates 3 and 2 are rcached when J is at least H2 or equivalently when thc solution u is in H4.
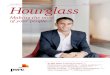
The next series of examples was intended to study the innuence of a singularity (at the origin)for a unit square domain regularly partitioned. or a quarter-circle for a typical mesh patternshown in Figure 3, The data function is of the form
f(x. Y) = 1" - C :x> - 2
where C is a real number chosen such that thc equilibrium condition (I) is satisfied. The regularityof J is closely related to :x:
fEH'(O)-:x > s - I
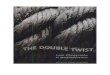
The results are plots of:x (regularity) versus u (rate of convcrgence of II iih - IIh 11.-0.1), The patternof the (0:. u) plot seems to bc almost gcneral: a linear increase of slope I towards the maximumvalues 2 and 2 for 4-nodc elements and 4 and 3 for 9-node clements. Figure 4 shows the rcsults

HOURGLASS INSTABILITY
II d./• 2"..
/!
l.
LOGHL-
LOGH
(a) flhn)
I- J /
;,1a: •~ .- Ia: •w j.-.
§ / 1
w
§•, .
tt •..
LOGHI
LOGH
225
~ L2-NORM ERROR + HI-NORM ERROR
Figure 2. Rates or convergence or the ERROR = u~-If' ror various regularities or the data runction f
Figure 3. Typical mesh on a quurlcr-circle domain

226 O.-P. JACQUOTTE, J. T. ODEN AND E. B. BECKER
(j• L2-NORM 4
+ H1-NORM
3
...~,~ ~ ~ t t t ~ ~• +• +
+
• ++
+
--. ---to ! ~,
1 3 a
(a) Bilinear elements
(j
• L2-NORM 4r • • •• ••+ Hl-NORM t'. ++ + + +
• +
• +• +
• ~.+
• +
• ++
• ++
+
'-~, , ,
0 1 2 3 a
(b) Biquadratic elements
Figure 4. (a, 11) plot for ;\ square domain

HOURGLASS INSTABILITY 227
(J'
• L2-NORM
+ H1-NORM
3
2• • • • • ·1: " .......... " " " .J .f .f ~ .: .: .: .f f .f .: .f• +• +
++
+++•
o 2 3 a
(a) Bilinear elements
(J'
• L2-NORM 4
• H1-NORM
3
•• 1 •••• • • • • • • • • • • • • • • • • • •••••••
2
•• J+++ ••• +++ •• +.+.+++++++
++
++
+
o 2 3 a
(b) Biquadratic clements
Figure 5. (IX, a) plot for a quarter-circle domain

228 O.-P. JACQUOTTE. J. T. ODEN ANDE; B. BECKER
obtained with a square domain with 4 and 9 node clements. Figure 5 was obtained on the quarter-circle with the same elements. A slight deformation from the original pattern can be observedfor the bilinear element. As for the biquadratic. the rates 3 and 2 are slowly reached for veryregular data (2'93 and [,78 for fefl4),
We conclude this section by noting that the calculation of the projection terms is almostnegligible with respect to the stiffness calculation, and therefore the pay-off due to theunderintegration is not altered by this a posteriori operation.
ACKNOWLEDGEMENT
The support of this work by NASA Lewis Research Center under Grant No. 3-329 is gratefullyacknowledged,
REFERENCES
I. T. Belytschko and 1. M. Kennedy. 'Computer models for subassembly simulation'. Nucl. Ellg. Des., 49, t 7-38 (July 1978).2. T. Belytschko and C. S. Tsay, 'A stabilization procedure for the quadrilateral plate element with one-point quadrature'.
1111.j. lIumer. methods ellg .• 19, 409-4t9 (1983),3. T. Belytschko, C. S. Tsay and W. K. Liu. 'A stabilization matrix for the bilinear Mindlin plate element'. Compo Meth.
Appl. Mech. £lIg .. 29.313-327 (1981).4. D. P. Flanagan and T. Bclytschko, 'A uniform strain hexahedron and quadrilateral with orthogonal hourglass control'.
Illt.j. lIumer, methods ellg .• 17.679-706 (1981).5. O.-P. Jacquolle. 'Stability, accuracy, and efficiency of some underintegrated methods in !inite element computations'.
Compo Meth. Appl. Mec/r. Ellg. (to appear).6. D.-P. Jacquolle and 1. T. Oden, 'Analysis of hourglass instabilities and control in underintegrated !inite element
methods'. Compo ,"feth. Appl. Mech. ElIg .. 43. 339-363 (1984).7. O.·P. Jacquollc and J. T. Oden, 'Analysis and trealment of hourglass instabilities in underintegrated !inite element
methods'. in IIIIIOt'atiL't'Methods ill NOlllillear Complltariollal Mechallics (Ed~. T. Belytschko. K. C. Park and W. K, Liu),Pineridge Press. Swansea. 1984.