-
Chapter 4Brownian Motion and Stochastic Calculus
The modeling of random assets in finance is based on stochastic
processes,which are families (Xt)tI of random variables indexed by
a time interval I. Inthis chapter we present a description of
Brownian motion and a constructionof the associated It stochastic
integral.
Contents4.1 Brownian Motion . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 1094.2 Constructions of Brownian Motion . .
. . . . . . . . . . . . 1134.3 Wiener Stochastic Integral . . . . .
. . . . . . . . . . . . . . . . . 1174.4 It Stochastic Integral . .
. . . . . . . . . . . . . . . . . . . . . . . . 1244.5 Stochastic
Calculus. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1304.6 Geometric Brownian Motion . . . . . . . . . . . . . . . . .
. . . 1374.7 Stochastic Differential Equations . . . . . . . . . .
. . . . . . 141Exercises . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 143
4.1 Brownian Motion
We start by recalling the definition of Brownian motion, which
is a funda-mental example of a stochastic process. The underlying
probability space(,F ,P) of Brownian motion can be constructed on
the space = C0(R+)of continuous real-valued functions on R+ started
at 0.
Definition 4.1. The standard Brownian motion is a stochastic
process(Bt)tR+ such that
1. B0 = 0 almost surely,
2. The sample trajectories t 7 Bt are continuous, with
probability 1.
109
-
N. Privault
3. For any finite sequence of times t0 < t1 < < tn, the
increments
Bt1 Bt0 , Bt2 Bt1 , . . . , Btn Btn1
are mutually independent random variables.
4. For any given times 0 6 s < t, Bt Bs has the Gaussian
distributionN (0, t s) with mean zero and variance t s.
In particular, for t R+, the random variable Bt ' N (0, t) has a
Gaussiandistribution with mean zero and variance t > 0.
Existence of a stochastic pro-cess satisfying the conditions of
Definition 4.1 will be covered in Section 4.2.
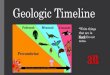
In Figure 4.1 we draw three sample paths of a standard Brownian
motionobtained by computer simulation using (4.3). Note that there
is no point incomputing the value of Bt as it is a random variable
for all t > 0, howeverwe can generate samples of Bt, which are
distributed according to the cen-tered Gaussian distribution with
variance t.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.2 0.4 0.6 0.8 1
B t
Fig. 4.1: Sample paths of a one-dimensional Brownian motion.
In particular, Property 4 in Definition 4.1 implies
IE[Bt Bs] = 0 and Var[Bt Bs] = t s, 0 6 s 6 t,
and we have
Cov(Bs, Bt) = IE[BsBt]= IE[Bs(Bt Bs +Bs)Bs]= IE
[Bs(Bt Bs)Bs + (Bs)2
]= IE[Bs(Bt Bs)] + IE
[(Bs)2
]= IE[Bs] IE[Bt Bs] + IE[(Bs)2]
110
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
= Var[Bs]= s, 0 6 s 6 t,
henceCov(Bs, Bt) = IE[BsBt] = min(s, t), s, t R+, (4.1)
cf. also Exercise 4.1-(d).
In the sequel, the filtration (Ft)tR+ will be generated by the
Brownian pathsup to time t, in other words we write
Ft := (Bs : 0 6 s 6 t), t > 0. (4.2)
Property 3 in Definition 4.1 shows that BtBs is independent of
all Brownianincrements taken before time s, i.e.
(Bt Bs) (Bt1 Bt0 , Bt2 Bt1 , . . . , Btn Btn1),
0 6 t0 6 t1 6 6 tn 6 s 6 t, hence Bt Bs is also independent of
thewhole Brownian history up to time s, hence Bt Bs is in fact
independentof Fs, s > 0.
As a consequence, Brownian motion is a continuous-time
martingale, cf.also Example 2 page 2, as we have
IE[Bt | Fs] = IE[Bt Bs | Fs] + IE[Bs | Fs]= IE[Bt Bs] +Bs= Bs, 0
6 s 6 t,
because it has centered and independent increments, cf. Section
6.1.
The n-dimensional Brownian motion can be constructed as (B1t ,
B2t , . . . , Bnt )tR+where (B1t )tR+ , (B2t )tR+ , . . .,(Bnt )tR+
are independent copies of (Bt)tR+ .Next, we turn to simulations of
2 dimensional and 3 dimensional Brownianmotions in Figures 4.2 and
4.3. Recall that the movement of pollen particlesoriginally
observed by R. Brown in 1827 was indeed 2-dimensional.Figure 4.4
presents an illustration of the scaling property of Brownian
motion.
" 111
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
Fig. 4.2: Two sample paths of a two-dimensional Brownian
motion.
-2-1.5
-1-0.5
0 0.5
1 1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Fig. 4.3: Sample paths of a three-dimensional Brownian
motion.
Fig. 4.4: Scaling property of Brownian motion.
112
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
4.2 Constructions of Brownian Motion
We refer to Theorem 10.28 of [Fol99] and to Chapter 1 of [RY94]
for theproof of the existence of Brownian motion as a stochastic
process (Bt)tR+satisfying the above Conditions 1-4. See also
Problem 4.21 for a constructionbased on linear interpolation.
Brownian motion as a random walk
For convenience we will informally regard Brownian motion as a
random walkover infinitesimal time intervals of length t, whose
increments
Bt := Bt+t Bt ' N (0, t)
over the time interval [t, t+t] will be approximated by the
Bernoulli randomvariable
Bt = t (4.3)
with equal probabilities (1/2, 1/2). Figure 4.5 presents a
simulation of Brow-nian motion as a random walk with t = 0.1.
Fig. 4.5: Construction of Brownian motion as a random walk.
The animation works in Acrobat Reader on the entire pdf
file.
" 113
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
N=1000; t
-
Brownian Motion and Stochastic Calculus
Hence by the central limit theorem we recover the fact that BT
has a centeredGaussian distribution with variance T , cf. point 4
of the above definition ofBrownian motion and the illustration
given in Figure 4.1.
Indeed, the central limit theorem states that given any sequence
(Xk)k>1 ofindependent identically distributed centered random
variables with variance2 = Var[Xk] = T , the normalized sum
X1 + +XNN
converges (in distribution) to a centered Gaussian random
variable N (0, 2)with variance 2 as N goes to infinity. As a
consequence, Bt could in factbe replaced by any centered random
variable with variance t in the abovedescription.
Construction by linear interpolation
Figure 4.6 represents the construction of Brownian motion by
successive lin-ear interpolations, cf. Problem 4.21.
Fig. 4.6: Construction of Brownian motion by linear
interpolation.
The following R code is used to generate Figure 4.6.
Download the corresponding or the that can be runhere.
" 115
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
{ "cells": [ { "cell_type": "code", "execution_count": null,
"metadata": { "collapsed": false }, "outputs": [], "source": [
"from IPython.display import HTML\n", "\n", "HTML('''\n", "''')" ]
}, { "cell_type": "code", "execution_count": null, "metadata": {
"collapsed": false }, "outputs": [], "source": [ "%matplotlib
notebook\n", "\n", "from pylab import *\n", "import time\n",
"import numpy as np\n", "import random as rm\n", "import matplotlib
\n", "import matplotlib.pyplot as plt \n", " \n", "def
path(axarr):\n", " global alpha,z,t,dt\n", " z1=z; \n", "
z=z[:-1]\n", " z=np.append([0],z)\n", " m = (np.add(z1,
z)).tolist()\n", " m = 0.5*np.array(m)\n", " y =
np.random.normal(0, pow(dt/4,alpha), len(t) - 1)\n", " x =
(np.add(m, y)).tolist() \n", " x = np.insert(z1, np.arange(len(x)),
x)\n", " t = list(range(2*len(t)-1))\n", " tt =
0.5*dt*np.array(t)\n", " axarr.clear()\n", "
axarr.plot(tt,np.append([0],x))\n", " n=2*len(t)-2\n", "
plt.text(0.1,x[0],'n=%d' % n)\n", " z=x\n", " dt=dt/2\n", "
ff.canvas.draw()\n", "\n", "ff, axarr =
plt.subplots(1,figsize=(12,7))" ] }, { "cell_type": "code",
"execution_count": null, "metadata": { "collapsed": true },
"outputs": [], "source": [ "alpha=0.5\n", "t = [0,1]\n", "dt =
1\n", "z=[np.random.normal(0, pow(dt,alpha))]\n",
"axarr.clear()\n", "axarr.plot(t*dt,[0]+z)\n",
"ff.canvas.draw()\n", "time.sleep(1)\n", "\n", "for f in
range(10):\n", " path(axarr)\n", " time.sleep(1)" ] }, {
"cell_type": "code", "execution_count": null, "metadata": {
"collapsed": true }, "outputs": [], "source": [ "path(axarr)" ] }
], "metadata": { "kernelspec": { "display_name": "Python [Root]",
"language": "python", "name": "Python [Root]" }, "language_info": {
"codemirror_mode": { "name": "ipython", "version": 3 },
"file_extension": ".py", "mimetype": "text/x-python", "name":
"python", "nbconvert_exporter": "python", "pygments_lexer":
"ipython3", "version": "3.5.1" }, "widgets": { "state": {},
"version": "1.1.2" } }, "nbformat": 4, "nbformat_minor": 0}
http://www.ntu.edu.sg/home/nprivault/indext.html
alpha=1/2t
-
N. Privault
alpha=1/2;t
-
Brownian Motion and Stochastic Calculus
4.3 Wiener Stochastic Integral
In this section we construct theWiener stochastic integral of
square-integrabledeterministic function with respect to Brownian
motion.
Recall that the price St of risky assets has been originally
modeled byBachelier as St := Bt, where is a volatility parameter.
The stochasticintegral w T
0f(t)dSt =
w T0f(t)dBt
can be used to represent the value of a portfolio as a sum of
profits andlosses f(t)dSt where dSt represents the stock price
variation and f(t) is thequantity invested in the asset St over the
short time interval [t, t+ dt].
A naive definition of the stochastic integral with respect to
Brownian mo-tion would consist in letting
w T0f(t)dBt :=
w T0f(t)dBt
dtdt,
and evaluating the above integral with respect to dt. However
this definitionfails because the paths of Brownian motion are not
differentiable, cf. (4.4).Next we present Its construction of the
stochastic integral with respect toBrownian motion. Stochastic
integrals will be first constructed as integralsof simple step
functions of the form
f(t) =ni=1
ai1(ti1,ti](t), t [0, T ], (4.5)
i.e. the function f takes the value ai on the interval (ti1,
ti], i = 1, 2, . . . , n,with 0 6 t0 < < tn 6 T , as
illustrated in Figure 4.8.
6f
-
b rt0
a1
b rt1
a2 b rt2
b rt3 t4
a4
t
Fig. 4.8: Step function t 7 f(t).
x
-
N. Privault
Recall that the classical integral of f given in (4.5) is
interpreted as the areaunder the curve f and computed as
w T0f(t)dt =
ni=1
ai(ti ti1).
In the next definition we adapt this construction to the setting
of stochasticintegration with respect to Brownian motion. The
stochastic integral (4.6)will be interpreted as the sum of profits
and losses ai(Bti Bti1), i =1, 2, . . . , n, in a portfolio holding
a quantity ai of a risky asset whose pricevariation is Bti Bti1 at
time i = 1, 2, . . . , n.
Definition 4.2. The stochastic integral with respect to Brownian
motion(Bt)t[0,T ] of the simple step function f of the form (4.5)
is defined by
w T0f(t)dBt :=
ni=1
ai(Bti Bti1). (4.6)
In the next Lemma 4.3 we determine the probability distribution
ofw T
0f(t)dBt
and we show that it is independent of the particular
representation (4.5) cho-sen for f(t).
Lemma 4.3. Let f be a simple step function f of the form (4.5).
The stochas-tic integral
w T0f(t)dBt defined in (4.6) has the centered Gaussian
distribution
w T0f(t)dBt ' N
(0,
w T0|f(t)|2dt
)
with mean IE[w T
0f(t)dBt
]= 0 and variance given by the It isometry
Var[w T
0f(t)dBt
]= IE
[(w T0f(t)dBt
)2]=
w T0|f(t)|2dt. (4.7)
Proof. Recall that if X1, X2, . . . , Xn are independent
Gaussian random vari-ables with probability distributions N (m1,
21), . . . ,N (mn, 2n) then the sumX1 + +Xn is a Gaussian random
variable with distribution
N(m1 + +mn, 21 + + 2n
).
As a consequence, the stochastic integral
w T0f(t)dBt =
nk=1
ak(Btk Btk1)
118
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
of the step function
f(t) =nk=1
ak1(tk1,tk](t), t [0, T ],
has a centered Gaussian distribution with mean 0 and
variance
Var[w T
0f(t)dBt
]= Var
[nk=1
ak(Btk Btk1)]
=nk=1
Var[ak(Btk Btk1)]
=nk=1|ak|2 Var[Btk Btk1 ]
=nk=1|ak|2(tk tk1)
=nk=1|ak|2
w tktk1
dt
=w T
0
nk=1|ak|21(tk1,tk](t)dt
=w T
0|f(t)|2dt,
since the simple function
f2(t) =ni=1
a2i1(ti1,ti](t), t [0, T ],
takes the value a2i on the interval (ti1, ti], i = 1, 2, . . . ,
n, as can be checkedfrom the following Figure 4.9.
6f2
-
b rt0
a21
b r
t1
a22 b rt2
b rt3 t4
a24
t
Fig. 4.9: Step function t 7 f2(t).
" 119
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
In the sequel we will make a repeated use of the space L2([0, T
]) of square-integrable functions.Definition 4.4. Let L2([0, T ])
denote the space of (measurable) functionsf : [0, T ] R such
that
fL2([0,T ]) :=w T
0|f(t)|2dt 1/2, as we have
w T0f2(t)dt =
w T0t2dt =
+ if 6 1/2,
[t1+2
1 + 2
]T0
= T1+2
1 + 2 1/2.
The norm L2([0,T ]) on L2([0, T ]) induces the distance
f gL2([0,T ]) :=w T
0|f(t) g(t)|2dt
-
Brownian Motion and Stochastic Calculus
Definition 4.5. Let L2() denote the space of random variables F
: Rsuch that
FL2([0,T ]) :=
IE[F 2]
-
N. Privault
w T0f(t)dBt ' N
(0,
w T0|f(t)|2dt
)
with mean IE[w T
0f(t)dBt
]= 0 and variance given by the It isometry
Var[w T
0f(t)dBt
]= IE
[(w T0f(t)dBt
)2]=
w T0|f(t)|2dt. (4.10)
Proof. The extension of the stochastic integral to all functions
satisfying(4.9) is obtained by density and a Cauchy sequence
argument, based onthe isometry relation (4.10). Given f a function
satisfying (4.9), consider asequence (fn)nN of simple functions
converging to f in L2([0, T ]), i.e.
limn
f fnL2([0,T ]) = limn
w T0|f(t) fn(t)|2dt = 0,
cf. e.g. Theorem 3.13 in [Rud74]. By the isometry (4.10) and the
triangleinequality we havew T0 fk(t)dBt w T0 fn(t)dBt
L2()
=
IE[(w T0fk(t)dBt
w T0fn(t)dBt
)2]
=
IE[(w T0
(fk(t) fn(t))dBt)2]
= fk fnL2([0,T ])6 fk fL2([0,T ]) + f fnL2([0,T ]),
which tends to 0 as k and n tend to infinity, hence(r T
0 fn(t)dBt)nN
is aCauchy sequence in L2() by for the L2()-norm.
Since the sequence(r T
0 fn(t)dBt)nN
is Cauchy and the space L2() iscomplete, cf. e.g. Theorem 3.11
in [Rud74] or Chapter 4 of [Dud02], we con-
clude that(w T
0fn(t)dBt
)nN
converges for the L2-norm to a limit in L2().
In this case we let See MH3100 Real Analysis I. The triangle
inequality fkfnL2([0,T ]) 6 fkfL2([0,T ]) +ffnL2([0,T ])
followsfrom the Minkowski inequality.
122
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.htmlhttps://en.wikipedia.org/wiki/Minkowski_inequalityhttp://www1.spms.ntu.edu.sg/~maths/Undergraduates/MASUndergradModules.html
-
Brownian Motion and Stochastic Calculus
w T0f(t)dBt := lim
n
w T0fn(t)dBt,
which also satisfies (4.10) from (4.7) From (4.10) we can check
that the limitis independent of the approximating sequence (fn)nN.
Finally, from the con-vergence of characteristic functions
IE[exp
(i
w T0f(t)dBt
)]= lim
nIE[exp
(i
w T0fn(t)dBt
)]= lim
nexp
(
2
2w T
0|fn(t)|2dt
)= exp
(
2
2w T
0|f(t)|2dt
),
f L2([0, T ]), R, we check thatw T
0f(t)dBt has the centered Gaussian
distribution w T0f(t)dBt ' N
(0,
w T0|f(t)|2dt
).
For example,w T
0etdBt has a centered Gaussian distribution with variance
w T0
e2tdt =[12 e
2t]T
0= 12
(1 e2T
).
Again, the Wiener stochastic integralw T
0f(s)dBs is nothing but a Gaussian
random variable and it cannot be computed in the way standard
integralare computed via the use of primitives. However, when f
L2([0, T ]) is inC1([0, T ]), we have the integration by parts
relation
w T0f(t)dBt = f(T )BT
w T0Btf
(t)dt. (4.11)
When f L2(R+) is in C1(R+) we also have following formulaw
0f(t)dBt =
w0f (t)Btdt, (4.12)
provided that limt t|f(t)|2 = 0 and f L2(R+), cf. e.g. Remark
2.5.9 in[Pri09]. This means that f is continuously differentiable
on [0, T ].
" 123
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
4.4 It Stochastic Integral
In this section we extend the Wiener stochastic integral from
deterministicfunctions in L2([0, T ]) to random square-integrable
(random) adapted pro-cesses. For this we will need the notion of
measurability.
The extension of the stochastic integral to adapted random
processes isactually necessary in order to compute a portfolio
value when the portfolioprocess is no longer deterministic. This
happens in particular when one needsto update the portfolio
allocation based on random events occurring on themarket.
A random variable F is said to be Ft-measurable if the knowledge
of Fdepends only on the information known up to time t. As an
example, ift =today,
the date of the past course exam is Ft-measurable, because it
belongs tothe past.
the date of the next Chinese new year, although it refers to a
future event,is also Ft-measurable because it is known at time
t.
the date of the next typhoon is not Ft-measurable since it is
not knownat time t.
the maturity date T of a European option is Ft-measurable for
allt [0, T ], because it has been determined at time 0.
the exercise date of an American option after time t (see
Section 11.4)is not Ft-measurable because it refers to a future
random event.
A stochastic process (Xt)t[0,T ] is said to be (Ft)t[0,T
]-adapted if Xt is Ft-measurable for all t [0, T ], where (Ft)t[0,T
] is the information flow definedin (4.2), i.e.
Ft := (Bs : 0 6 s 6 t), t > 0.
For example,
- (Bt)tR+ is (Ft)tR+ -adapted,
- (Bt+1)tR+ is not (Ft)tR+ -adapted,
- (Bt/2)tR+ is (Ft)tR+ -adapted,
-(Bt
)tR+
is not (Ft)tR+ -adapted,
124
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
-(
maxs[0,t]Bs)tR+ is (Ft)tR+ -adapted,
-(w t
0Bsds
)tR+
is (Ft)tR+ -adapted,
-(w t
0f(s)dBs
)t[0,T ]
is (Ft)t[0,T ]-adapted for f L2([0, T ]).
In other words, a process (Xt)tR+ is (Ft)t[0,T ]-adapted if the
value of Xt attime t depends only on information known up to time
t. Note that the valueof Xt may still depend on known future data,
for example a fixed futuredate in the calendar, such as a maturity
time T > t, as long as its value isknown at time t.
Stochastic integrals of adapted processes will be first
constructed as integralsof simple predictable processes (ut)tR+ of
the form
ut :=ni=1
Fi1(ti1,ti](t), t R+, (4.13)
where Fi is an Fti1 -measurable random variable for i = 1, 2, .
. . , n, and0 = t0 < t1 < < tn1 < tn = T .
For example, a natural approximation of (Bt)tR+ by a simple
predictableprocess can be constructed as
ut =ni=1
Fi1(ti1,ti](t) :=ni=1
Bti11(ti1,ti](t), t R+,
since Fi := Bti1 is Fti1-measurable for i = 1, 2, . . . , n.
The notion of simple predictable process is natural in the
context of port-folio investment, in which Fi will represent an
investment allocation decidedat time ti1 and to remain unchanged
over the time period (ti1, ti].Definition 4.7. Let L2( [0, T ])
denote the space of stochastic processes
u : [0, T ] R(, t) 7 ut()
such that
uL2([0,T ]) :=
IE[w T
0|ut|2dt
]
-
N. Privault
if
limn
u u(n)L2([0,T ]) = limn
=
IE[w T
0|ut u(n)t |2dt
]= 0.
By convention, u : R+ R is denoted in the sequel by ut(), t R+,
, and the random outcome is often dropped for convenience
ofnotation.
Definition 4.8. The stochastic integral with respect to Brownian
motion(Bt)tR+ of any simple predictable process (ut)tR+ of the form
(4.13) isdefined by w T
0utdBt :=
ni=1
Fi(Bti Bti1), (4.14)
with 0 = t0 < t1 < < tn1 < tn = T .
The use of predictability in the definition (4.14) is essential
from a financialpoint of view, as Fi will represent a portfolio
allocation made at time ti1and kept constant over the trading
interval [ti1, ti], while Bti Bti1 repre-sents a change in the
underlying asset price over [ti1, ti]. See also the
relateddiscussion on self-financing portfolios in Section 5.2 and
Lemma 5.2 on theuse of stochastic integrals to represent the value
of a portfolio.
The next proposition extends the construction of the stochastic
integralfrom simple predictable processes to square-integrable
(Ft)t[0,T ]-adaptedprocesses (Xt)tR+ for which the value of Xt at
time t only depends oninformation contained in the Brownian path up
to time t. This also meansthat knowing the future is not permitted
in the definition of the It integral,for example a portfolio
strategy that would allow the trader to buy at thelowest and sell
at the highest is not possible as it would require knowledgeof
future market data.
Note that the difference between Relation (4.15) below and
Relation (4.10)is the expectation on the right hand side.
Proposition 4.9. The stochastic integral with respect to
Brownian motion(Bt)tR+ extends to all adapted processes (ut)tR+
such that
u2L2([0,T ]) := IE[w T
0|ut|2dt
]
-
Brownian Motion and Stochastic Calculus
In addition, the It integral of an adapted process (ut)tR+ is
always a cen-tered random variable:
IE[w T
0utdBt
]= 0. (4.16)
Proof. We start by showing that the It isometry (4.15) holds for
the simplepredictable process u of the form (4.13). We have
IE[(w T
0utdBt
)2]= IE
( ni=1
Fi(Bti Bti1))2
= IE
( ni=1
Fi(Bti Bti1)) n
j=1Fj(Btj Btj1)
= IE
ni,j=1
FiFj(Bti Bti1)(Btj Btj1)
= IE
[ni=1|Fi|2(Bti Bti1)2
]
+2 IE
16i
-
N. Privault
= IE[w T
0|ut|2dt
],
where we applied the tower property (18.40) of conditional
expectationsand the facts that Bti Bti1 is independent of Fti1
and
IE[Bti Bti1 ] = 0, IE[(Bti Bti1)2
]= ti ti1, i = 1, 2, . . . , n.
The extension of the stochastic integral to square-integrable
adapted pro-cesses (ut)tR+ is obtained by density and a Cauchy
sequence argument us-ing the isometry (4.15), in the same way as in
the proof of Proposition 4.6.By Lemma 1.1 of [IW89], pages 22 and
46, or Proposition 2.5.3 of [Pri09],the set of simple predictable
processes forms a linear space which is densein the subspace L2ad(
R+) made of square-integrable adapted processesin L2( R+). In other
words, given u a square-integrable adapted processthere exists a
sequence (u(n))nN of simple predictable processes convergingto u in
L2( R+), i.e.
limn
u u(n)L2([0,T ]) = limn
IE[w T
0
ut u(n)t 2dt] = 0.Since the (u(n))nN sequence converges, it is
Cauchy in L2(R+) hence bythe It isometry (4.15), the sequence
(r T0 u
(n)t dBt
)nN
is a Cauchy sequencein L2(), therefore it admits a limit in the
complete space L2(). In thiscase we let w T
0utdBt := lim
n
w T0u
(n)t dBt
and the limit is unique from (4.15) and satisfies (4.15). The
fact that the ran-dom variable
w T0utdBt is centered can be proved first on simple
predictable
process u of the form (4.13) as
IE[w T
0utdBt
]= IE
[ni=1
Fi(Bti Bti1)]
=ni=1
IE[IE[Fi(Bti Bti1)|Fti1 ]]
=ni=1
IE[Fi IE[Bti Bti1 |Fti1 ]]
=ni=1
IE[Fi IE[Bti Bti1 ]]
= 0,
128
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
and this identity extends as above from simple predictable
processes toadapted processes (ut)tR+ in L2( R+).
As an application of the It isometry (4.15), we note in
particular the identity
IE[(w T
0BtdBt
)2]= IE
[w T0|Bt|2dt
]=
w T0
IE[|Bt|2
]dt =
w T0tdt = T
2
2 .
Note also that by bilinearity, the It isometry (4.15) can also
be written as
IE[w T
0utdBt
w T0vtdBt
]= IE
[w T0utvtdt
],
for all square-integrable adapted processes (ut)tR+ , (vt)tR+
.
In addition, when the integrand (ut)tR+ is not a deterministic
function,the random variable
w T0utdBt no longer has a Gaussian distribution, except
in some exceptional cases.
Definite stochastic integral
The definite stochastic integral of u over an interval [a, b]
[0, T ] is definedas w b
autdBt :=
w T01[a,b](t)utdBt,
with in particularw badBt =
w T01[a,b](t)dBt = Bb Ba, 0 6 a 6 b,
We also have the Chasles relationw cautdBt =
w bautdBt +
w cbutdBt, 0 6 a 6 b 6 c,
and the stochastic integral has the following linearity
property:w T
0(ut + vt)dBt =
w T0utdBt +
w T0vtdBt, u, v L2(R+).
Stochastic modeling of asset returns
In the sequel we will define the return at time t R+ of the
risky asset(St)tR+ as
dSt = Stdt+ StdBt, ordStSt
= dt+ dBt. (4.17)
" 129
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
with R and > 0. This equation can be formally rewritten in
integralform as
ST = S0 + w T
0Stdt+
w T0StdBt, (4.18)
hence the need to define an integral with respect to dBt, in
addition to theusual integral with respect to dt. Note that in view
of the definition (4.14),this is a continuous-time extension of the
notion portfolio value based on apredictable portfolio
strategy.
In Proposition 4.9 we have defined the stochastic integral of
square-integrable processes with respect to Brownian motion, thus
we have madesense of the equation (4.18) where (St)tR+ is an
(Ft)t[0,T ]-adapted process,which can be rewritten in differential
notation as in (4.17).
This model will be used to represent the random price St of a
risky assetat time t. Here the return dSt/St of the asset is made
of two components: aconstant return dt and a random return dBt
parametrized by the coefficient, called the volatility.
4.5 Stochastic Calculus
Our goal is now to solve Equation (4.17) and for this we will
need to introduceIts calculus in Section 4.5 after a review of
classical deterministic calculus.
We will frequently use the relation
XT = X0 +w T
0dXt, T > 0,
which holds for any process (Xt)tR+ .
Deterministic calculus
The fundamental theorem of calculus states that for any
continuously differ-entiable (deterministic) function f we have
f(x) = f(0) +w x
0f (y)dy.
In differential notation this relation is written as the first
order expansion
df(x) = f (x)dx, (4.19)
where dx is infinitesimally small. Higher-order expansions can
be obtainedfrom Taylors formula, which, letting
130
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
f(x) := f(x+x) f(x),
states that
f(x) = f (x)x+ 12f(x)(x)2 + 13!f
(x)(x)3 + 14!f(4)(x)(x)4 + .
Note that Relation (4.19) can be obtained by neglecting all
terms of orderhigher than one in Taylors formula, since (x)n 2, as
xbecomes infinitesimally small.
Stochastic calculus
Let us now apply Taylors formula to Brownian motion, taking
Bt = Bt+t Bt ' t,
and lettingf(Bt) := f(Bt+t) f(Bt),
we have
f(Bt)
= f (Bt)Bt +12f(Bt)(Bt)2 +
13!f(Bt)(Bt)3 +
14!f
(4)(Bt)(Bt)4 + .
From the construction of Brownian motion by its small increments
Bt =t, it turns out that the terms in (t)2 and tBt ' (t)3/2 can
be neglected in Taylors formula at the first order of
approximation in t.However, the term of order two
(Bt)2 = (t)2 = t
can no longer be neglected in front of t itself.
Simple It formula
For f C2(R), Taylors formula written at the second order for
Brownianmotion reads
df(Bt) = f (Bt)dBt +12f(Bt)dt, (4.20)
for infinitesimally small dt. Note that writing this formula
as
df(Bt)dt
= f (Bt)dBtdt
+ 12f(Bt)
" 131
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
does not make sense because the pathwise derivative
dBtdt' dt
dt' 1
dt'
of Bt with respect to t does not exist. Integrating (4.20) on
both sides andusing the relation
f(Bt) f(B0) =w t
0df(Bs)
we get the integral form of Its formula for Brownian motion,
i.e.
f(Bt) = f(B0) +w t
0f (Bs)dBs +
12
w t0f (Bs)ds.
It processes
We now turn to the general expression of Its formula, which is
stated forIt processes.Definition 4.10. An It process is a
stochastic process (Xt)tR+ that can bewritten as
Xt = X0 +w t
0vsds+
w t0usdBs, t R+, (4.21)
or in differential notation
dXt = vtdt+ utdBt,
where (ut)tR+ and (vt)tR+ are square-integrable adapted
processes.Given (t, x) 7 f(t, x) a smooth function of two variables
on R+ R, fromnow on we let f
tdenote partial differentiation with respect to the first
(time)
variable in f(t, x), while fx
denotes partial differentiation with respect tothe second
(price) variable in f(t, x).Theorem 4.11. (It formula for It
processes). For any It process (Xt)tR+of the form (4.21) and any f
C1,2(R+ R) we have
f(t,Xt) = f(0, X0) +w t
0vsf
x(s,Xs)ds+
w t0usf
x(s,Xs)dBs
+w t
0
f
s(s,Xs)ds+
12
w t0|us|2
2f
x2(s,Xs)ds. (4.22)
Proof. The proof of the It formula can be outlined as follows in
the casewhere (Xt)tR+ = (Bt)tR+ is a standard Brownian motion. We
refer to The-132
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
orem II-32, page 79 of [Pro04] for the general case.
Let {0 = tn0 6 tn1 6 6 tnn = t}, n > 1, be a refining
sequence ofpartitions of [0, t] tending to the identity. We have
the telescoping identity
f(Bt) f(B0) =nk=1
f(Btni) f(Btn
i1),
and from Taylors formula
f(y) f(x) = (y x)fx
(x) + 12(y x)2
2f
x2(x) +R(x, y),
where the remainder R(x, y) satisfies R(x, y) 6 o(|y x|2), we
get
f(Bt) f(B0) =nk=1
(BtniBtn
i1)fx
(Btni1
) + 12 |BtniBtn
i1|2
2f
x2(Btn
i1)
+nk=1
R(Btni, Btn
i1).
It remains to show that as n tends to infinity the above
converges to
f(Bt) f(B0) =w t
0
f
x(Bs)dBs +
12
w t0
2f
x2(Bs)ds.
From the relationw t
0df(s,Xs) = f(t,Xt) f(0, X0),
we can rewrite (4.22) asw t
0df(s,Xs) =
w t0vsf
x(s,Xs)ds+
w t0usf
x(s,Xs)dBs
+w t
0
f
s(s,Xs)ds+
12
w t0|us|2
2f
x2(s,Xs)ds,
which allows us to rewrite (4.22) in differential notation,
as
df(t,Xt) (4.23)
= ft
(t,Xt)dt+ utf
x(t,Xt)dBt + vt
f
x(t,Xt)dt+
12 |ut|
2 2f
x2(t,Xt)dt,
or" 133
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
df(t,Xt) =f
t(t,Xt)dt+
f
x(t,Xt)dXt +
12 |ut|
2 2f
x2(t,Xt)dt.
In case the function x 7 f(x) does not depend on the time
variable t weget
df(Xt) = utf
x(Xt)dBt + vt
f
x(Xt)dt+
12 |ut|
2 2f
x2(Xt)dt,
and
df(Xt) =f
x(Xt)dXt +
12 |ut|
2 2f
x2(Xt)dt.
Taking ut = 1, vt = 0 and X0 = 0 in (4.21) yields Xt = Bt, in
which casethe It formula (4.22) reads
f(t, Bt) = f(0, B0)+w t
0
f
s(s,Bs)ds+
w t0
f
x(s,Bs)dBs+
12
w t0
2f
x2(s,Bs)ds,
i.e. in differential notation:
df(t, Bt) =f
t(t, Bt)dt+
f
x(t, Bt)dBt +
122f
x2(t, Bt)dt. (4.24)
It multiplication table
Next, consider two It processes (Xt)tR+ and (Yt)tR+ written in
integralform as
Xt = X0 +w t
0vsds+
w t0usdBs, t R+,
andYt = Y0 +
w t0bsds+
w t0asdBs, t R+,
or in differential notation as
dXt = vtdt+ utdBt, and dYt = btdt+ atdBt, t R+.
The It formula can also be written for functions f C1,2,2(R+ R2)
wehave of two variables as
134
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
df(t,Xt, Yt) =f
t(t,Xt, Yt)dt+
f
x(t,Xt, Yt)dXt +
12 |ut|
2 2f
x2(t,Xt, Yt)dt
+ fy
(t,Xt, Yt)dXt +12 |vt|
2 2f
x2(t,Xt, Yt)dt+ utvt
2f
xy(t,Xt, Yt)dt,
(4.25)
which can be used to show that
d(XtYt) = XtdYt + YtdXt + dXt dYt
where the product dXt dYt is computed according to the It
rule
dt dt = 0, dt dBt = 0, dBt dBt = dt, (4.26)
which can be encoded in the It multiplication table:
dt dBtdt 0 0dBt 0 dt
Table 4.1: It multiplication table.
From the It Table 4.1 it follows that
dXt dYt = (vtdt+ utdBt) (btdt+ atdBt)= btvt(dt)2 + btutdtdBt +
atvtdtdBt + atut(dBt)2
= atutdt.
Hence we also have
(dXt)2 = (vtdt+ utdBt)2
= (vt)2(dt)2 + (ut)2(dBt)2 + 2utvt(dt dBt)= (ut)2dt,
according to the It Table 4.1. Consequently, (4.23) can also be
rewritten as
df(t,Xt) =f
t(t,Xt)dt+ vt
f
x(t,Xt)dt+ ut
f
x(t,Xt)dBt +
12(ut)
2 2f
x2(t,Xt)dt
= ft
(t,Xt)dt+f
x(t,Xt)dXt +
122f
x2(t,Xt)(dXt)2.
" 135
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
Examples
Applying Its formula (4.24) to B2t with
B2t = f(t, Bt) and f(t, x) = x2,
we get
d(B2t ) = df(Bt)
= ft
(t, Bt)dt+f
x(t, Bt)dBt +
122f
x2(t, Bt)dt
= 2BtdBt + dt,
since
f
t(t, x) = 0, f
x(t, x) = 2x, and 12
2f
x2(t, x) = 1.
Note that from the It Table 4.1 we could also write directly
d(B2t ) = BtdBt +BtdBt + (dBt)2 = 2BtdBt + dt.
Next, by integration in t [0, T ] we find
B2T = B0 + 2w T
0BsdBs +
w T0dt = 2
w T0BsdBs + T,
and the relation w T0BsdBs =
12(B2T T
).
Similarly, we have
d(B3t ) = 3B2t dBt + 3Btdt,
d(
sinBt)
= cos(Bt)dBt 12 sin(Bt)dt,
d eBt = eBtdBt +12 e
Btdt,
d logBt =1BtdBt
12B2t
dt,
d etBt = Bt etBtdt+t2
2 etBtdt,
etc.
136
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
Notation
We close this section with some comments on the practice of Its
calculus. Incertain finance textbooks, Its formula for e.g.
geometric Brownian motion(St)tR+ given by
dSt = Stdt+ StdBtcan be found written in the notation
f(T, ST ) = f(0, X0) + w T
0Stf
St(t, St)dBt +
w T0Stf
St(t, St)dt
+w T
0
f
t(t, St)dt+
12
2w T
0S2t2f
S2t(t, St)dt,
ordf(St) = St
f
St(St)dBt + St
f
St(St)dt+
12
2S2t2f
S2t(St)dt.
The notation fSt
(St) can in fact be easily misused in combination with
thefundamental theorem of classical calculus, and potentially leads
to the wrongidentity
df(St) =f
St(St)dSt.
Similarly, writing
df(Bt) =f
x(Bt)dBt +
122f
x2(Bt)dt
is consistent, while writing
df(Bt) =f(Bt)Bt
dBt +122f(Bt)B2t
dt
is potentially a source of confusion. Note also that the right
hand side of theIt formula uses partial derivatives while its left
hand side is a total derivative.
4.6 Geometric Brownian Motion
Our aim in this section is to solve the stochastic differential
equation
dSt = Stdt+ StdBt (4.27)
that will be used later on to model the St of a risky asset at
time t, where R and > 0. This equation is rewritten in integral
form as
St = S0 + w t
0Sudu+
w t0SudBu, t R+. (4.28)
" 137
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
It can be solved by applying Its formula to the It process
(St)tR+ asin (4.21) with vt = St and ut = St, and by taking f(St) =
logSt withf(x) = log x, from which we derive the log-return
dynamics
d logSt = Stf (St)dt+ Stf (St)dBt +12
2S2t f(St)dt
= dt+ dBt 12
2dt,
hence
logSt logS0 =w t
0d logSr
=w t
0
( 12
2)dr +
w t0dBr
=( 12
2)t+ Bt, t R+,
andSt = S0 exp
(( 12
2)t+ Bt
), t R+.
The above calculation provides a proof for the next
proposition.
Proposition 4.12. The solution of (4.27) is given by
St = S0 et+Bt2t/2, t R+.
Proof. Let us provide an alternative proof by searching for a
solution of theform
St = f(t, Bt)
where f(t, x) is a function to be determined. By Its formula
(4.24) we have
dSt = df(t, Bt) =f
t(t, Bt)dt+
f
x(t, Bt)dBt +
122f
x2(t, Bt)dt.
Comparing this expression to (4.27) and identifying the terms in
dBt we get
f
x(t, Bt) = St,
f
t(t, Bt) +
122f
x2(t, Bt) = St.
Using the relation St = f(t, Bt), these two equations rewrite
as
138
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
f
x(t, Bt) = f(t, Bt),
f
t(t, Bt) +
122f
x2(t, Bt) = f(t, Bt).
Since Bt is a Gaussian random variable taking all possible
values in R, theequations should hold for all x R, as follows:
f
x(t, x) = f(t, x),
f
t(t, x) + 12
2f
x2(t, x) = f(t, x).
(4.31a)
(4.31b)
To solve (4.31a) we let g(t, x) = log f(t, x) and rewrite
(4.31a) as
g
x(t, x) = log f
x(t, x) = 1
f(t, x)f
x(t, x) = ,
i.e.g
x(t, x) = ,
which is solved asg(t, x) = g(t, 0) + x,
hencef(t, x) = eg(t,0) ex = f(t, 0) ex.
Plugging back this expression into the second equation (4.31b)
yields
ex ft
(t, 0) + 122 exf(t, 0) = f(t, 0) ex,
i.e.f
t(t, 0) =
( 2/2
)f(t, 0).
In other words, we have gt
(t, 0) = 2/2, which yields
g(t, 0) = g(0, 0) +( 2/2
)t,
i.e.
f(t, x) = eg(t,x) = eg(t,0)+x
= eg(0,0)+x+(2/2)t
= f(0, 0) ex+(2/2)t, t R+.
" 139
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
We conclude that
St = f(t, Bt) = f(0, 0) eBt+(2/2)t,
and the solution to (4.27) is given by
St = S0 eBt+(2/2)t, t R+.
The next Figure 4.11 presents an illustration of the geometric
Brownian pro-cess of Proposition 4.12.
Fig. 4.11: Geometric Brownian motion started at S0 = 1, with r =
1 and 2 = 0.5.
N=1000; t
-
Brownian Motion and Stochastic Calculus
= S0 eBt+(2/2)tdt+ S0 eBt+(
2/2)tdBt= Stdt+ StdBt.
Exercise: Show that at any time t > 0, the random variable St
:=S0 eBt+(
2/2)t has the lognormal distribution with probability
densityfunction
x 7 f(x) = 1x
2te((
2/2)t+log(x/S0))2/(22t), x > 0,
and log-variance 2.
4.7 Stochastic Differential Equations
In addition to geometric Brownian motion there exists a large
family ofstochastic differential equations that can be studied,
although most of thetime they cannot be explicitly solved. Let
now
: R+ Rn Rd Rn
where Rd Rn denotes the space of d n matrices, and
b : R+ Rn R
satisfy the global Lipschitz condition
(t, x) (t, y)2 + b(t, x) b(t, y)2 6 K2x y2,
t R+, x, y Rn. Then there exists a unique strong solution to the
stochasticdifferential equation
Xt = X0 +w t
0(s,Xs)dBs +
w t0b(s,Xs)ds, t R+, (4.32)
where (Bt)tR+ is a d-dimensional Brownian motion, see e.g.
[Pro04], Theo-rem V-7. In addition, the solution process (Xt)tR+ of
(4.32) has the Markovproperty, see V-6 of [Pro04].
The term (s,Xs) in (4.32) will later be interpreted in Chapter 7
as a localvolatility component.
Next, we consider a few examples of stochastic differential
equations thatcan be solved explicitly using It calculus, in
addition to geometric Brownianmotion.
" 141
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
Examples
1. Consider the stochastic differential equation
dXt = Xtdt+ dBt, X0 = x0, (4.33)
with > 0 and > 0.
Looking for a solution of the form
Xt = a(t)Yt = a(t)(x0 +
w t0b(s)dBs
)where a() and b() are deterministic functions, yields
dXt = d(a(t)Yt) = Yta(t)dt+ a(t)dYt = Yta(t)dt+ a(t)b(t)dBt,
after applying Theorem 4.11 to the It process x0+r t0 b(s)dBs of
the form
(4.21) with ut = b(t) and v(t) = 0, and to the function f(t, x)
= a(t)x.Hence, by identification with (4.33) we geta
(t) = a(t)
a(t)b(t) = ,
hence a(t) = a(0) et = et and b(t) = /a(t) = et, which
showsthat
Xt = x0 et + w t
0e(ts)dBs (4.34)
= x0 et + Bt w t
0e(ts)Bsds, t R+, (4.35)
Remark: the solution of this equation cannot be written as a
functionf(t, Bt) of t and Bt as in the proof of Proposition
4.12.
2. Consider the stochastic differential equation
dXt = tXtdt+ et2/2dBt, X0 = x0.
Looking for a solution of the form Xt = a(t)(X0 +
r t0 b(s)dBs
), where
a() and b() are deterministic functions we get a(t)/a(t) = t
anda(t)b(t) = et2/2, hence a(t) = et2/2 and b(t) = 1, which yields
Xt =et2/2(X0 +Bt), t R+.
3. Consider the stochastic differential equation
142
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
dYt = (2Yt + 2)dt+ 2YtdBt,
where , > 0.
Letting Xt =Yt we have dXt = Xtdt+ dBt, hence
Yt = (Xt)2 =(
etY0 +
w t0
e(ts)dBs)2
.
We refer to II-4.4 of [KP99] for more examples of stochastic
differentialequations that admit closed-form solutions.
Exercises
Exercise 4.1 Let (Bt)tR+ denote a standard Brownian motion.a)
Let c > 0. Among the following processes, tell which is a
standard Brow-
nian motion and which is not. Justify your answer.
(i)(Bc+t Bc
)tR+
,(ii)
(cBt/c2
)tR+
,(iii)
(Bct2
)tR+
,(iv)
(Bt +Bt/2
)tR+
.
b) Compute the stochastic integralsw T
02dBt and
w T0
(2 1[0,T/2](t) + 1(T/2,T ](t)
)dBt
and determine their probability distributions (including mean
and vari-ance).
c) Determine the probability distribution (including mean and
variance) ofthe stochastic integral w 2
0sin(t) dBt.
d) Compute IE[BtBs] in terms of s, t R+.e) Let T > 0. Show
that for f : [0, T ] 7 R a differentiable function such
that f(T ) = 0, we havew T
0f(t)dBt =
w T0f (t)Btdt.
Hint: Apply Its calculus to t 7 f(t)Bt.
Exercise 4.2 Given (Bt)tR+ a standard Brownian motion and n >
1, letthe random variable Xn be defined as" 143
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
Xn :=w 2
0sin(nt)dBt, n > 1.
a) Give the probability distribution of Xn for all n > 1.b)
Show that (Xn)n>1 is a sequence of pairwise independent and
identically
distributed random variables.
Hint: We have sin a sin b = 12(
cos(a b) cos(a+ b)), a, b R.
Exercise 4.3 Apply the It formula to the process Xt := sin2(Bt),
t R+.
Exercise 4.4 Consider the price process (St)tR+ given by the
stochasticdifferential equation
dSt = rStdt+ StdBt.
Find the stochastic integral decomposition of the random
variable ST , i.e.,find the constant c R and the process (t,T
)t[0,T ] such that
ST = c+w T
0t,T dBt. (4.36)
Exercise 4.5 Given T > 0, find a stochastic integral
decomposition of (BT )3of the form
(BT )3 = c+w T
0t,T dBt, (4.37)
where c R is a constant and (t,T )t[0,T ] is an adapted process
to be deter-mined.
Exercise 4.6 Let f L2([0, T ]). Compute the conditional
expectation
IE[
er T
0 f(s)dBsFt] , 0 6 t 6 T,
where (Ft)t[0,T ] denotes the filtration generated by (Bt)t[0,T
].
Exercise 4.7 Let f L2([0, T ]) and consider a standard Brownian
motion(Bt)t[0,T ]. Using the result of Exercises 4.6, show that the
process
t 7 exp(w t
0f(s)dBs
12
w t0f2(s)ds
), t [0, T ],
is an (Ft)-martingale, where (Ft)t[0,T ] denotes the filtration
generated by(Bt)t[0,T ].
144
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
Exercise 4.8 Consider (Bt)tR+ a standard Brownian motion
generating thefiltration (Ft)tR+ and the process (St)tR+ defined
by
St = S0 exp(w t
0sdBs +
w t0usds
), t R+,
where (t)tR+ and (ut)tR+ are (Ft)t[0,T ]-adapted processes.
a) Compute dSt using It calculus.b) Show that St satisfies a
stochastic differential equation to be determined.
Exercise 4.9 Consider (Bt)tR+ a standard Brownian motion
generating thefiltration (Ft)tR+ , and let > 0.
a) Compute the mean and variance of the random variable St
defined as
St := 1 + w t
0eBs
2s/2dBs, t R+.
b) Express d log(St) using the It formula.c) Show that St =
eBt
2t/2 for t R+.
Exercise 4.10
a) Solve the ordinary differential equation df(t) = cf(t)dt and
the stochasticdifferential equation dSt = rStdt + StdBt, t R+,
where r, R areconstants and (Bt)tR+ is a standard Brownian
motion.
b) Show that
IE[St] = S0 ert and Var[St] = S20 e2rt( e2t 1), t R+.
c) Compute d logSt using the It formula.d) Assume that (Wt)tR+
is another standard Brownian motion, correlated
to (Bt)tR+ according to the It rule dWt dBt = dt, for [1, 2],and
consider the solution (Yt)tR+ of the stochastic differential
equationdYt = Ytdt + YtdWt, t R+, where , R are constants.
Computef(St, Yt), for f a C2 function of R2.
Exercise 4.11 We consider a leveraged fund with factor : 1 on an
index(St)tR+ modeled as the geometric Brownian motion
dSt = rStdt+ StdBt, t R+,
under the risk-neutral measure P.
" 145
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
a) Find the portfolio allocation (t, t) of the leveraged fund
value
Ft = tSt + tAt, t R+,
where At := A0 ert is the risk-free money market account.b) Find
the stochastic differential equation satisfied by (Ft)tR+ under
the
self-financing condition dFt = tdSt + tdAt.c) Find the relation
between the fund value Ft and the index St by solving
the stochastic differential equation obtained for Ft in Question
(b). Forsimplicity we take F0 := S0 .
Exercise 4.12 Compute the expectation
IE[exp
(
w T0BtdBt
)]for all < 1/T . Hint: Expand (BT )2 using Its formula.
Exercise 4.13
a) Solve the stochastic differential equation
dXt = bXtdt+ ebtdBt, t R+,
where (Bt)tR+ is a standard Brownian motion and , b R.b) Solve
the stochastic differential equation
dXt = bXtdt+ eatdBt, t R+,
where (Bt)tR+ is a standard Brownian motion and a, b, R are
positiveconstants.
Exercise 4.14 Solve the stochastic differential equation
dXt = h(t)Xtdt+ XtdBt,
where > 0 and h(t) is a deterministic, integrable function of
t R+.
Hint: Look for a solution of the form Xt = f(t) eBt2t/2, where
f(t) is a
function to be determined, t R+.
Exercise 4.15 Given T > 0, let (XTt )t[0,T ) denote the
solution of thestochastic differential equation
146
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
dXTt = dBt XTtT t
dt, t [0, T ), (4.38)
under the initial condition XT0 = 0 and > 0.
a) Show that
XTt = (T t)w t
0
1T s
dBs, t [0, T ).
Hint: Start by computing d(XTt /(T t)) using Its calculus.b)
Show that IE[XTt ] = 0 for all t [0, T ).c) Show that Var[XTt ] =
2t(T t)/T for all t [0, T ).d) Show that limtT XTt = 0 in L2(). The
process (XTt )t[0,T ] is called a
Brownian bridge.
Exercise 4.16 Exponential Vasicek model (1). Consider a Vasicek
process(rt)tR+ solution of the stochastic differential equation
drt = (a brt)dt+ dBt, t R+,
where (Bt)tR+ is a standard Brownian motion and , a, b > 0
are positiveconstants. Show that the exponential Xt := ert
satisfies a stochastic differ-ential equation of the form
dXt = Xt(a bf(Xt))dt+ g(Xt)dBt,
where the coefficients a and b and the functions f(x) and g(x)
are to bedetermined.
Exercise 4.17 Exponential Vasicek model (2). Consider a short
term rateinterest rate process (rt)tR+ in the exponential Vasicek
model:
drt = rt( a log rt)dt+ rtdBt, (4.39)
where , a, are positive parameters and (Bt)tR+ is a standard
Brownianmotion.
a) Find the solution (Zt)tR+ of the stochastic differential
equation
dZt = aZtdt+ dBt
as a function of the initial condition Z0, where a and are
positive pa-rameters.
b) Find the solution (Yt)tR+ of the stochastic differential
equation
dYt = ( aYt)dt+ dBt (4.40)" 147
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
as a function of the initial condition Y0. Hint: Let Zt := Yt
/a.c) Let Xt = eYt , t R+. Determine the stochastic differential
equation
satisfied by (Xt)tR+ .d) Find the solution (rt)tR+ of (4.39) in
terms of the initial condition r0.e) Compute the mean IE[rt] of rt,
t R+.f) Compute the asymptotic mean limt IE[rt].
Exercise 4.18 Cox-Ingersoll-Ross (CIR) model. Consider the
equation
drt = ( rt)dt+ rtdBt (4.41)
modeling the variations of a short term interest rate process
rt, where , , and r0 are positive parameters.
a) Write down the equation (4.41) in integral form.b) Let u(t) =
IE[rt]. Show, using the integral form of (4.41), that u(t)
satisfies
the differential equation
u(t) = u(t).
c) By an application of Its formula to r2t , show that
dr2t = rt(2+ 2 2rt)dt+ 2r3/2t dBt. (4.42)
d) Using the integral form of (4.42), find a differential
equation satisfied byv(t) = IE[r2t ].
Exercise 4.19 Let (Bt)tR+ denote a standard Brownian motion
generatingthe filtration (Ft)tR+ .
a) Consider the It formula
f(Xt) = f(X0)+w t
0usf
x(Xs)dBs+
w t0vsf
x(Xs)ds+
12
w t0u2s2f
x2(Xs)ds,(4.43)
where Xt = X0 +w t
0usdBs +
w t0vsds.
Compute St := eXt by the It formula (4.43) applied to f(x) = ex
andXt = Bt + t, > 0, R.
b) Let r > 0. For which value of does (St)tR+ satisfy the
stochastic dif-ferential equation
dSt = rStdt+ StdBt ?
c) Given > 0, let Xt := (BT Bt), and compute Var[Xt], t [0, T
]. One may use the Gaussian moment generating function IE[ eX ] =
e
2/2 for X 'N (0, 2).148
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
d) Let the process (St)tR+ be defined by St = S0 eBt+t, t R+.
Using theresult of Exercise A.2, show that the conditional
probability that ST > Kgiven St = x can be computed as
P(ST > K | St = x) = (
log(x/K) + (T t)T t
), t [0, T ).
Hint: Use the time splitting decomposition
ST = StSTSt
= St e(BTBt)+(Tt), t [0, T ].
Problem 4.20 Tanaka formula. Let (Bt)tR+ be a standard Brownian
motionstarted at B0 R. All questions are interdependent.
a) Does the It formula apply to the European call payoff
function f(x) :=(xK)+ ? Why?
b) For every > 0, consider the approximation f(x) of f(x) :=
(x K)+defined by
f(x) :=
xK if x > K + ,
14 (xK + )
2 if K < x < K + ,
0 if x < K .
Plot the graph of the function x 7 f(x) for = 1 and K = 10.c)
Using the It formula, show that we have
f(BT ) = f(B0)+w T
0f (Bt)dBt+
14`
({t [0, T ] : K < Bt < K +
}),
(4.44)where ` denotes the measure of time length (Lebesgue
measure) in R.
d) Show that lim0 1[K,)() f ()L2(R+) = 0.e) Show, using the It
isometry, that the limit
LK[0,T ] := lim012`({t [0, T ] : K < Bt < K + })
exists in L2(), and that we have
(BT K)+ = (B0 K)+ +w T
01[K,)(Bt)dBt +
12L
K[0,T ]. (4.45)
Hint: Show that lim0
IE[w T
0
(1[K,)(Bt) f (Bt)
)2dt
]= 0.
" 149
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
The quantity LK[0,T ] is called the local time spent by Brownian
motion atthe level K.
Problem 4.21 The goal of this problem is to prove the existence
of stan-dard Brownian motion (Bt)t[0,1] as a stochastic process
satisfying the fourproperties of Definition 4.1, i.e.:
1. B0 = 0 almost surely,
2. The sample trajectories t 7 Bt are continuous, with
probability 1.
3. For any finite sequence of times t0 < t1 < < tn, the
increments
Bt1 Bt0 , Bt2 Bt1 , . . . , Btn Btn1
are independent.
4. For any given times 0 6 s < t, Bt Bs has the Gaussian
distributionN (0, t s) with mean zero and variance t s.
The construction will proceed by the linear interpolation scheme
illustratedin Figure 4.6. We work on the space C0([0, 1]) of
continuous functions on [0, 1]started at 0, with the norm
f := maxt[0,1]
|f(t)|
and the distancef g := max
t[0,1]|f(t) g(t)|.
The following ten questions are interdependent.
a) Show that for any Gaussian random variable X ' N (0, 2) we
have
P(|X| > ) 6 /2
e2/(22), > 0.
Hint: Start from the inequality IE[(X )+] > 0 and compute the
left-hand side.
b) Let X and Y be two independent centered Gaussian random
variableswith variances 2 and 2. Show that the conditional
distribution
P(X dx | X + Y = z)
of X given X +Y = z is Gaussian with mean 2z/(2 +2) and
variance22/(2 + 2).
150
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
Hint: Use the definition
P(X dx | X + Y = z) := P(X dx and X + Y dz)P(X + Y dz)
and the formulas
dP(X 6 x) := 122
ex2/(22)dx, dP(Y 6 x) := 1
22ex
2/(22)dx,
where dx (resp. dy) represents a small interval [x, x+ dx]
(resp. [y, y +dy]).
c) Let (Bt)tR+ denote a standard Brownian motion and let 0 <
u < v. Givethe distribution of B(u+v)/2 given that Bu = x and Bv
= y.
Hint: Note that given that Bu = x, the random variable Bv can be
writtenas
Bv = (Bv B(u+v)/2) + (B(u+v)/2 Bu) + x, (4.46)
and apply the result of Question (b) after identifying X and Y
in theabove decomposition (4.46).
d) Consider the random sequences
Z(0) =(0, Z(0)1
)Z(1) =
(0, Z(1)1/2, Z
(0)1)
Z(2) =(0, Z(2)1/4, Z
(1)1/2, Z
(2)3/4, Z
(0)1)
Z(3) =(0, Z(3)1/8, Z
(2)1/4, Z
(3)3/8, Z
(1)1/2, Z
(3)5/8, Z
(2)3/4, Z
(3)7/8, Z
(0)1)
......
Z(n) =(0, Z(n)1/2n , Z
(n)2/2n , Z
(n)3/2n , Z
(n)4/2n , . . . , Z
(n)1)
Z(n+1)=(0, Z(n+1)1/2n+1 , Z
(n)1/2n , Z
(n+1)3/2n+1 , Z
(n+1)2/2n , Z
(n+1)5/2n+1 , Z
(n+1)3/2n , . . . , Z
(n+1)1
)with Z(n)0 = 0, n > 0, defined recursively as
i) Z(0)1 ' N (0, 1),
ii) Z(1)1/2 'Z
(0)0 + Z
(0)1
2 +N (0, 1/4),
iii) Z(2)1/4 'Z
(1)0 + Z
(1)1/2
2 +N (0, 1/8), Z(2)3/4 '
Z(1)1/2 + Z
(0)1
2 +N (0, 1/8),
" 151
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
and more generally
Z(n+1)(2k+1)/2n+1 =
Z(n)k/2n + Z
(n)(k+1)/2n
2 +N (0, 1/2n+2), k = 0, 1, . . . , 2n1,
where N (0, 1/2n+2) is an independent centered Gaussian sample
withvariance 1/2n+2, and Z(n+1)k/2n := Z
(n)k/2n , k = 0, 1, . . . , 2n.
In the sequel we denote by(Z
(n)t
)t[0,1] the continuous-time random path
obtained by linear interpolation of the sequence points in(Z
(n)k/2n
)k=0,1,...,2n .
Draw a sample of the first four linear interpolations(Z
(0)t
)t[0,1],
(Z
(1)t
)t[0,1],(
Z(2)t
)t[0,1],
(Z
(3)t
)t[0,1], and label the values of Z
(n)k/2n on the graphs for
k = 0, 1, . . . , 2n and n = 0, 1, 2, 3.e) Using an induction
argument, explain why for all n > 0 the sequence
Z(n) =(0, Z(n)1/2n , Z
(n)2/2n , Z
(n)3/2n , Z
(n)4/2n , . . . , Z
(n)1)
has same distribution as the sequence
B(n) :=(B0, B1/2n , B2/2n , B3/2n , B4/2n , . . . , B1
).
Hint: Compare the constructions of Questions (c) and (d) and
note thatunder the above linear interpolation, we have
Z(n)(2k+1)/2n+1 =
Z(n)k/2n + Z
(n)(k+1)/2n
2 , k = 0, 1, . . . , 2n 1.
f) Show that for any n > 0 we have
P(Z(n+1) Z(n) > n) 6 2nP(|Z(n+1)1/2n+1 Z(n)1/2n+1 | >
n).
Hint: Use the inequality
P
(2n1k=0
Ak
)6
2n1k=0
P(Ak)
for a suitable choice of events (Ak)k=0,1,...,2n1.g) Use the
results of Questions (a) and (f) to show that for any n > 0
we
haveP(Z(n+1) Z(n) > n) 6 2n/2n2 e2n2n+1 .
h) Taking n = 2n/4, show that
152
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
P
( n=0
Z(n+1) Z(n) 2n/4) 1
}con-
verges uniformly on [0, 1] to a continuous (random) function
(Zt)t[0,1].
Hint: Use the fact that C0([0, 1]) is a complete space for the
norm.j) Argue that the limit (Zt)t[0,1] is a standard Brownian
motion on [0, 1] by
checking the four relevant properties.
Problem 4.22 Consider (Bt)tR+ a standard Brownian motion, and
for anyn > 1 and T > 0, define the discretized quadratic
variation
Q(n)T :=
nk=1
(BkT/n B(k1)T/n)2, n > 1.
a) Compute IE[Q
(n)T
], n > 1.
b) Compute Var[Q(n)T ], n > 1.c) Show that
limn
Q(n)T = T,
where the limit is taken in L2(), that is, show that
limn
Q(n)T TL2() = 0,
where Q(n)T TL2() := IE [(Q(n)T T )2], n > 1.d) By the result
of Question (c), show that the limit
w T0BtdBt := lim
n
nk=1
(BkT/n B(k1)T/n)B(k1)T/n
exists in L2(), and compute it.
Hint: Use the identity
" 153
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
https://en.wikipedia.org/wiki/Complete_metric_spacehttps://en.wikipedia.org/wiki/Borel%E2%80%93Cantelli_lemmahttp://www.ntu.edu.sg/home/nprivault/indext.html
-
N. Privault
(x y)y = 12(x2 y2 (x y)2), x, y R.
e) Consider the modified quadratic variation defined by
Q(n)T :=
nk=1
(B(k1/2)T/n B(k1)T/n)2, n > 1.
Compute the limit limn Q(n)T in L2() by repeating the steps of
Ques-tions (a)-(c).
f) By the result of Question (e), show that the limit
w T0Bt dBt := lim
n
nk=1
(BkT/n B(k1)T/n)B(k1/2)T/n
exists in L2(), and compute it.
Hint: Use the identities
(x y)y = 12(x2 y2 (x y)2),
and(x y)x = 12(x
2 y2 + (x y)2), x, y R.
g) More generally, by repeating the steps of Questions (e) and
(f), show thatfor any [0, 1] the limit
w T0Bt dBt := lim
n
nk=1
(BkT/n B(k1)T/n)B(k)T/n
exists in L2(), and compute it.h) Comparison with deterministic
calculus. Compute the limit
limn
nk=1
(k )Tn
(kT
n (k 1)T
n
)for all values of in [0, 1].
Exercise 4.23 Let (Bt)tR+ be a standard Brownian motion
generating theinformation flow (Ft)tR+ .
a) Let 0 6 t 6 T . What is the probability distribution of BT
Bt?b) From the answer to Exercise A.4-(b), show that
154
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
"
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic Calculus
IE[(BT )+ | Ft] =T t
2 eB2t /(2(Tt)) +Bt
(BtT t
),
0 6 t 6 T . Hint: Use the time splitting decomposition BT = BT
Bt+Bt.c) Let > 0, R, and Xt := Bt + t, t R+. Compute eXt by
applying
the It formula
f(Xt) = f(X0)+w t
0usf
x(Xs)dBs+
w t0vsf
x(Xs)ds+
12
w t0u2s2f
x2(Xs)ds
to f(x) = ex, where Xt is written as Xt = X0 +w t
0usdBs +
w t0vsds,
t R+.d) Let St = eXt , t R+, and r > 0. For which value of
does (St)tR+
satisfy the stochastic differential equation
dSt = rStdt+ StdBt ?
Exercise 4.24 From the answer to Exercise A.4-(b), show that for
any Rwe have
IE[( BT )+ | Ft] =T t
2 e(Bt)2/(2(Tt)) + ( Bt)
( BtT t
),
0 6 t 6 T .
Hint: Use the time splitting decomposition BT = BT Bt +Bt.
" 155
This version: May 26,
2018http://www.ntu.edu.sg/home/nprivault/indext.html
http://www.ntu.edu.sg/home/nprivault/indext.html
-
Brownian Motion and Stochastic CalculusBrownian
MotionConstructions of Brownian MotionWiener Stochastic IntegralIt
Stochastic IntegralStochastic CalculusGeometric Brownian
MotionStochastic Differential EquationsExercises
anm3: 3.EndLeft: 3.StepLeft: 3.PauseLeft: 3.PlayLeft:
3.PlayPauseLeft: 3.PauseRight: 3.PlayRight: 3.PlayPauseRight:
3.StepRight: 3.EndRight: 3.Minus: 3.Reset: 3.Plus: anm4: 4.EndLeft:
4.StepLeft: 4.PauseLeft: 4.PlayLeft: 4.PlayPauseLeft: 4.PauseRight:
4.PlayRight: 4.PlayPauseRight: 4.StepRight: 4.EndRight: 4.Minus:
4.Reset: 4.Plus: anm5: 5.EndLeft: 5.StepLeft: 5.PauseLeft:
5.PlayLeft: 5.PlayPauseLeft: 5.PauseRight: 5.PlayRight:
5.PlayPauseRight: 5.StepRight: 5.EndRight: 5.Minus: 5.Reset:
5.Plus: anm6: 6.EndLeft: 6.StepLeft: 6.PauseLeft: 6.PlayLeft:
6.PlayPauseLeft: 6.PauseRight: 6.PlayRight: 6.PlayPauseRight:
6.StepRight: 6.EndRight: 6.Minus: 6.Reset: 6.Plus: anm7: 7.EndLeft:
7.StepLeft: 7.PauseLeft: 7.PlayLeft: 7.PlayPauseLeft: 7.PauseRight:
7.PlayRight: 7.PlayPauseRight: 7.StepRight: 7.EndRight: 7.Minus:
7.Reset: 7.Plus: anm8: 8.EndLeft: 8.StepLeft: 8.PauseLeft:
8.PlayLeft: 8.PlayPauseLeft: 8.PauseRight: 8.PlayRight:
8.PlayPauseRight: 8.StepRight: 8.EndRight: 8.Minus: 8.Reset:
8.Plus: